Изобретение относится к вычислительной технике и может быть использовано для позиционирования видеокамеры, работающей в составе системы технического зрения, обеспечивающей распознавание номеров на игровой рулетке.
Известен способ определения положения оптической оси объектива относительно базовых поверхностей корпуса видеокамеры (УДК 007.52. Сборник научных трудов. Серия Технические науки. Вып.5.3. ВСГТУ. Найханов В.В., Цыдыпов Ц.Ц., Жимбуева Л.Д. Автоматизация калибровки видеокамеры), позволяющий определять положение оптической оси объектива относительно корпуса телекамеры. Способ основан на определении точки пересечения оптической оси с картинной плоскостью и последующего расчета необходимых параметров. Для определения положения оптической оси объектива относительно корпуса телекамеры необходимы плоскопараллельное перемещение камеры с высокой степенью точности и эталонный объект, который можно взять в виде шестиугольника правильной формы. Согласно расчетной схеме, если телекамеру, у которой положение точки пересечения оптической оси с предметной плоскостью в предметной системе координат известно, закрепить стационарно, а предметную плоскость с калибровочным объектом устанавливать в разных положениях, то можно сформировать массив точек в предметной системе координат. Прямая, аппроксимирующая этот массив точек, определит положение оптической оси объектива относительно корпуса телекамеры.
Недостатком данного способа является необходимость использования эталонного объекта, исключающая проведение калибровки при отсутствии такового, отсутствие корректировки резкости изображения, поступающего с видеокамеры.
Известно устройство автоматической адаптивной трехмерной калибровки бинокулярной системы технического зрения [Пат. №2250498 РФ, МКИ G06K 9/32. Способ автоматической адаптивной трехмерной калибровки бинокулярной системы технического зрения и устройство для его реализации [Текст] / С.В.Дегтярев, B.C.Титов, М.И.Труфанов. - №2003105497/09; заявлено 25.02.2003; опубл. 20.04.2005, Бюл. №11. - 15 с.].
Недостатком устройства является обеспечение калибровки системы технического зрения, обязательно состоящей из двух видеокамер (невозможность применения устройства для позиционирования единственной камеры).
Наиболее близким к предлагаемому является способ автоматической калибровки бинокулярной системы технического зрения [Пат. №2250498 РФ, МКИ G06K 9/32. Способ автоматической адаптивной трехмерной калибровки бинокулярной системы технического зрения и устройство для его реализации [Текст] / С.В.Дегтярев, B.C.Титов, М.И.Труфанов. - №2003105497/09; заявлено 25.02.2003; опубл. 20.04.2005, Бюл. №11. - 15 с.], согласно которому находят преобразование, которое устанавливает соответствие между точками, лежащими на двух параллельных калибровочных плоскостях в трехмерном пространстве и плоскости изображения, проводят измерение и установление исходных значений параметров, определяют калибровочный объект путем построения функций принадлежности всех возможных калибровочных объектов на изображении и последующего выбора объекта с наибольшим значением функции принадлежности, измеряют среднюю яркость изображений, поступающих с видеокамер, определяют расхождения фокусных расстояний видеокамер, входящих в состав бинокулярной системы технического зрения, определяют углы отклонения осей локальных декартовых систем координат видеокамер относительно декартовой системы координат бинокулярной системы технического зрения, определяющие вектора направлений взгляда каждой видеокамеры.
Недостатком способа является необходимость использования двух видеокамер одновременно, в результате чего способ не может быть применен при калибровке системы технического зрения распознавания номеров игровой рулетки, имеющей единственную видеокамеру.
Наиболее близким к предлагаемому является устройство калибровки оптико-электронной системы [Пат. №2199150 РФ, МКИ G06K 9/32. Устройство калибровки оптико-электронной системы / С.В.Дегтярев, B.C.Титов, М.И.Труфанов. - №2001103097/09; заявлено 02.02.2001; опубл. 20.02.2003, Бюл. №5. - 6 с.], содержащее видеокамеру, блок ввода изображения, системный контроллер, блок управления и блок ориентации.
Недостатком данного устройства является необходимость применения эталонного объекта для проведения калибровки, который должен быть расположен на игровом колесе рулетки, а также невозможность проведения адаптивной (т.е. по мере необходимости, вызванной возникновением отклонений калибруемых параметров системы технического зрения вследствие влияния различных факторов) калибровки.
Задачей изобретения является обеспечение калибровки по изображению игрового колеса (или его части) без применения эталонного объекта, размещаемого на колесе.
Задача решается тем, что в способ, включающий измерение средней яркости изображения, введены корректировка резкости изображения, распознавание числа на игровом колесе и определение координат и центра описанного вокруг числа прямоугольника, определение положения видеокамеры относительно указанного прямоугольника, позиционирование видеокамеры в заданное положение.
Техническая задача решается тем, что в устройство, содержащее блок ввода изображения, системный контроллер, блок управления и блок ориентации, введен блок распознавания, причем вход блока ввода изображения предназначен для ввода изображения, групповой выход блока ввода изображения соединен с групповым входом блока распознавания, групповой выход которого подключен к групповому входу системного контроллера, чей групповой вход-выход соединен с первым групповым входом-выходом блока управления, второй групповой вход-выход блока управления соединен с групповым входом-выходом блока ориентации.
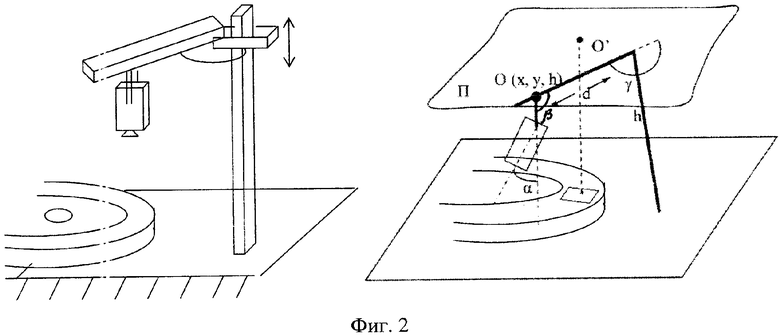
Сущность изобретения поясняется чертежами, где на фиг.1 показана структурная схема устройства, на фиг.2 - взаимное положение видеокамеры калибруемой системы технического зрения и игрового колеса.
Устройство содержит блок ввода изображения 1, блок распознавания 2, системный контроллер 3, блок управления 4, блок ориентации 5, причем вход блока ввода изображения 1 предназначен для ввода изображения, групповой выход блока ввода изображения 1 соединен с групповым входом блока распознавания 2, групповой выход которого подключен к групповому входу системного контроллера 3, чей групповой вход-выход соединен с первым групповым входом-выходом блока управления 4, второй групповой вход-выход блока управления 4 соединен с групповым входом-выходом блока ориентации 5.
В соответствии с предлагаемым способом получают изображение области игрового колеса, содержащей несколько ячеек с числами (далее числами). Получаемое изображение поступает с видеокамеры, входящей в состав системы технического зрения (СТЗ), используемой для распознавания чисел. По изображению определяется его средняя яркость и затем при помощи управления чувствительностью видеокамеры или изменения яркости освещения средняя яркость приводится к заданному значению. Путем дифференцирования изображения и усреднения яркостей пикселов полученного градиентного изображения определяется величина, пропорциональная резкости изображения. Резкость приводят к максимальному значению изменением расстояния между игровым колесом и видеокамерой СТЗ или фокусировкой видеокамеры. Далее производят распознавание числа и определение координат описанного вокруг числа прямоугольника, ось симметрии которого направлена в центр колеса (далее описанного прямоугольника). Относительно данного прямоугольника впоследствии осуществляется позиционирование видеокамеры. Распознавание основано на сравнении текущего и эталонных изображений посредством поэлементного вычитания первого из второго и выбора того эталона, для которого разность изображений минимальна. При этом размер текущего изображения приводится масштабированием (увеличением или уменьшением) к размеру эталонного изображения, составляющего 11×5 элементов. В процессе позиционирования итерационно оцениваются параметры, характеризующие пространственное положение видеокамеры СТЗ относительно прямоугольника, и затем видеокамера поворачивается и смещается для приведения параметров положения к заданным значениям.
Видеокамера СТЗ крепится на горизонтальной направляющей, по которой перемещается прямолинейно. Кроме того, видеокамера вращается относительно своей оси в горизонтальной плоскости (фиг.2, угол β) и поворачивается относительно своей точки крепления к горизонтальной направляющей в вертикальной плоскости (фиг.2, угол α). Горизонтальная направляющая закреплена на вертикальной направляющей (фиг.2) и вращается в горизонтальной плоскости (фиг.2, угол γ). Таким образом, параметрами, определяющими расположение видеокамеры над рулеткой являются:
- смещение точки O(х,у), определяемое величинами х и у, относительно точки O/ в горизонтальной плоскости П, и высота h видеокамеры 1 (фиг.2);
- углы поворота видеокамеры 1 в горизонтальной (β) и вертикальной (α) плоскостях;
- угол поворота горизонтальной направляющей в горизонтальной плоскости (γ);
- смещение видеокамеры относительно начала горизонтальной направляющей d (фиг.2).
Параметры γ и d необходимы для ориентации камеры в пространстве, но взаимное расположение видеокамеры СТЗ и описанного вокруг числа прямоугольника задают параметры х и у, которые выражаются через γ и d:
x=d·sin(γ),
y=d·cos(γ).
Устройство работает следующим образом. Видеокамеру СТЗ первоначально вручную устанавливают в положение, примерно соответствующее рабочему положению. Изображение части колеса рулетки поступает на вход блока ввода изображения 1. Блок ввода изображения 1 выполняет преобразование формата данных, описывающих изображение, в формат данных, используемый в устройстве, и со своего группового выхода передает полученное изображение на групповой вход блока распознавания 2.
Блок распознавания 2 предназначен для распознавания числа на изображении и определении координат описанного вокруг него прямоугольника. Вследствие того, что видеокамера установлена (см. абзац выше) так, что изображение всегда содержит число, на выходе блока распознавания 2 после распознавания формируются координаты вершин и центра описанного прямоугольника, которые поступают на вход системного контроллера 3. Координаты представляют в двумерной прямоугольной системе координат в плоскости изображения, центр системы координат является точкой пересечения плоскости изображения и главной оптической оси видеокамеры СТЗ.
Принцип функционирования системного контроллера и оценки положения видеокамеры СТЗ идентичен описанному в патенте-прототипе (пат. РФ 2199150), согласно которому параметры положения оценивают по координатам «верхней» вершины и вершинам основания пирамиды. В данной заявке «верхней» вершине соответствует центр описанного прямоугольника, а вершинам основания - вершины прямоугольника. Поступившее в системный контроллер 3 изображение обрабатывается и по изображению оцениваются параметры (х, у, h, α, β, γ, d). Калибровка состоит из двух основных действий на каждом шаге: определение положения видеокамеры СТЗ относительно описанного прямоугольника и последующая переориентация видеокамеры СТЗ с учетом найденных значений. В начале калибровки рассчитываются смещение точки O(х,у) - центра описанного прямоугольника (фиг.2) относительно О/ в горизонтальной плоскости П и высота h над рулеткой, углы поворота видеокамеры относительно своей оси в горизонтальной (β) и вертикальной (α) плоскостях.
После того как отклонения найдены, их значения и значения яркости и резкости изображения с системного контроллера 3 передаются на БУ 4. Выполнение программы системным контроллером 3 приостанавливается до тех пор, пока от БО 5 через БУ 4 не поступит сигнал, уведомляющий о переориентации видеокамеры 1. БУ 4 формирует сигналы, необходимые для управления двигателями, входящими в состав БО 5. Блок ориентации 5 путем механического воздействия, оказываемого на видеокамеру СТЗ, изменяет ее положение в пространстве. Также блок ориентации 5 управляет резкостью и яркостью изображения. После переориентации видеокамеры СТЗ БО 5 посылает сигнал готовности на БУ 4, который, в свою очередь, посылает сигнал готовности на системный контроллер 4. Далее на системный контроллер 3 вновь поступают координаты описанного вокруг числа прямоугольника, по которому оцениваются параметры х, у, h, α, β, γ, d. В случае наличия отклонений, превосходящих заданные, процесс переориентации видеокамеры СТЗ повторяется. Иначе дополнительно корректируются оставшиеся небольшие отклонения, после чего калибровка считается завершенной.
В качестве блока ввода изображения 1 может быть использовано устройство, представленное в патенте РФ 2295153.
Блок распознавания состоит из модуля памяти, предназначенного для хранения эталонов чисел от 0 до 36, и модуля сравнения, предназначенного для сопоставления текущего числа с эталонами, выбора наиболее близкого эталона и определения координат и центра описанного вокруг числа прямоугольника. Блок распознавания может быть реализован с использованием программируемой логической микросхемы типа Virtex и подключенной и совместимой с ней микросхемой статической памяти.
В качестве системного контроллера 3 может быть использован микропроцессор с соответствующими вспомогательными элементами, микроЭВМ, цифровой сигнальный процессор, персональная ЭВМ.
В качестве блока управления 4 может быть использовано устройство управления робота ПУМА/VS-100, описанное в книге «Техническое зрение роботов» /под ред. А.Пью; Пер. с англ. Д.Ф.Миронова; Под. ред. Г.П.Катыса. - М.: Машиностроение, 1987. - 380 с.: ил.
Блок ориентации 5 может быть построен на базе сервомоторов постоянного тока с инкрементными оптическими шифраторами, применяемыми в манипуляторе ПУМА/VS-100 («Техническое зрение роботов» /под ред. А.Пью; Пер. с англ. Д.Ф.Миронова; Под. ред. Г.П.Катыса. - М.: Машиностроение, 1987. - 380 с.: ил.).
Предлагаемое решение позволяет установить видеокамеру системы технического зрения для распознавания номеров игровой рулетки в оптимальное положение, при котором обеспечивается максимальная достоверность распознавания чисел.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ АДАПТИВНОЙ ТРЕХМЕРНОЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2250498C2 |
| СПОСОБ ИЗМЕРЕНИЯ БЫСТРЫХ ДВИЖЕНИЙ ГЛАЗ И ОТКЛОНЕНИЙ БИНОКУЛЯРНОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352244C2 |
| СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ ИЗ ТРЕХ ВИДЕОКАМЕР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2382515C1 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2022 |
|
RU2785952C1 |
| УСТРОЙСТВО КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ | 2005 |
|
RU2280892C1 |
| УСТРОЙСТВО КАЛИБРОВКИ ОПТИКОЭЛЕКТРОННОЙ СИСТЕМЫ | 2001 |
|
RU2199150C2 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2005 |
|
RU2286598C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| СПОСОБ АДАПТИВНОЙ КАЛИБРОВКИ РАДИАЛЬНОЙ ДИСТОРСИИ ОПТИЧЕСКОЙ ПОДСИСТЕМЫ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2004 |
|
RU2289111C2 |
| Способ автоматического контроля технологического процесса и безопасности и интеллектуальная видеосистема для его реализации | 2022 |
|
RU2788432C1 |
Изобретение относится к вычислительной технике и может быть использовано для позиционирования видеокамеры, работающей в составе системы технического зрения, обеспечивающей распознавание номеров на игровой рулетке. Техническим результатом является обеспечение калибровки по изображению игрового колеса (или его части) без размещения эталонного объекта на колесе. В способе калибровки системы технического зрения распознавания номеров игровой рулетки осуществляют измерение средней яркости изображения, корректируют резкость изображения, распознают числа на игровом колесе и определяют координаты и центр описанного вокруг числа прямоугольника. Определяют положение видеокамеры относительно указанного прямоугольника и позиционируют видеокамеру в заданное положение. Устройство для реализации способа калибровки содержит блок ввода изображения, системный контроллер, блок управления и блок ориентация, блок распознавания. В результате обеспечивается возможность установки видеокамеры системы технического зрения для распознавания номеров игровой рулетки в оптимальное положение, при котором обеспечивается максимальная достоверность распознавания чисел. 2 н.п. ф-лы., 2 ил.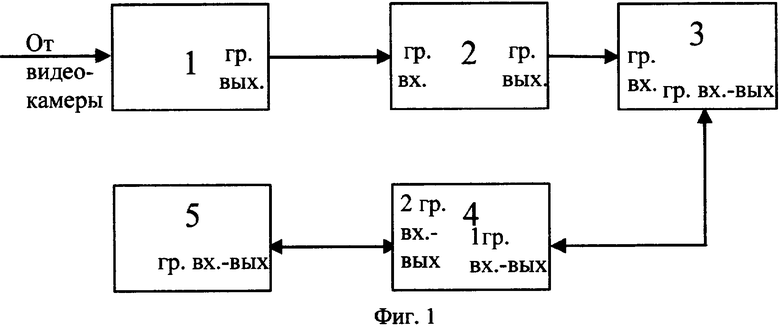
| СПОСОБ АВТОМАТИЧЕСКОЙ АДАПТИВНОЙ ТРЕХМЕРНОЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2250498C2 |
| УСТРОЙСТВО КАЛИБРОВКИ ОПТИКОЭЛЕКТРОННОЙ СИСТЕМЫ | 2001 |
|
RU2199150C2 |
| СПОСОБ РЕМОНТА ПОДВОДНОГО ТРУБОПРОВОДА | 2006 |
|
RU2325578C1 |
| US 5083073 A, 21.01.1992 | |||
| JP 60146374 A, 02.08.1985 | |||
| Устройство задания частоты вращения вала двигателя | 1986 |
|
SU1343067A1 |
| WO 9830977 А, 16.07.1998. | |||

