Изобретение относится к области транспорта и предназначено для использования при строительстве метро, мини-метро и в отдельных случаях для прокладки эстакадных дорог для колесно-рельсового транспорта.
Область применения гравитационных внеуличных трасс в городских условиях достаточно обширна, однако по целому ряду причин такой вид транспорта не реализован.
Известны подземные пешеходные переходы, прокладываемые в виде тоннелей под проезжей частью улицы с лестничными входами и выходами (Е.Н. Дубровин и др. "Изыскание и проектирование городских дорог". - М.: Транспорт, 1981).
Преодоление таких переходов от пешеходов требует затрат времени, энергии для преодоления лестничных входов, горизонтальных подземных участков. Это в полной мере относится и к метрополитенам мелкого заложения.
Известны технические устройства, позволяющие использовать гравитационные трассы и соответственно гравитационные силы при создании транспортных систем маятникового (челночного) типа, обеспечивающих перевозку пассажиров по подземным переходам.
Рассмотрим наиболее характерные из них. Известна транспортная система челночного типа, содержащая путь с гравитационным участком разгона и замедления и транспортное средство (А.с. 1268455, В 61 В 1/00 1986).
Транспортное средство выкатывается на скоростной спуск, разгоняется при движении (под горку) по гравитационному участку и, имея запас кинетической энергии, въезжает на участок замедления и на тупиковую горку, затем съезжает в обратном направлении.
Недостатком транспортной системы является то, что отсутствуют средства для компенсации потерь энергии на трение, удары на стыках участков и т.д., что не позволяет транспортному средству выполнять возвратное движение между концевыми участками пути.
Известна транспортная система маятникового типа, содержащая путь с гравитационными участками разгона и замедления и транспортное средство, и у которой путь имеет горизонтальные концевые участки и снабжен дополнительными прямолинейными направляющими отрезками пути, установленными у концевых участков и мест перегиба профиля пути параллельно пути с возможностью взаимодействия с рабочей поверхностью свободной половины опоры транспортного средства, имеющей гребень в средней части опорной поверхности, причем дополнительные отрезки пути у концевых участков пути установлены ниже уровня концевых участков и снабжены механизмами изменения угла их наклона, каждый из которых имеет пару регулируемых шарнирных стоек, а каждый дополнительный отрезок пути у мест перегиба профиля пути установлен параллельно хорде, проведенной через точки касания вписанной окружности в место перегиба профиля пути, причем вертикальная кривая пути установлена при переходе к концевым участкам пути выпуклостью (RU 2077435, В 61 В 1/00, 15/00, 1997).
По утверждению авторов, экономический эффект состоит в экономии энергии и повышении плавности хода в результате применения "дополнительных направляющих", создающих более пологие "углы встречи прямолинейных направляющих участков пути".
Общим недостатком и главным является то, что не обеспечено в этих системах безопасное движение пассажиров по гравитационной внеуличной трассе. Известно, что для обеспечения комфорта и безопасности пассажиров в общественном транспорте ограничивают величину ускорения (замедления) транспортных средств. Как правило, это ускорение находится в пределах 0,9-1,2 м/с2. При движении по гравитационной трассе этот важнейший параметр в указанных устройствах не контролируется. Известна гравитационная транспортная система, схема которой опубликована в технической литературе. "Разновидностью скоростной гравитационной транспортной системы является система с подземной трассировкой в тоннеле и с подземными станциями, от которых поезда сначала устремляются под уклон вглубь земли, а затем по инерции поднимаются к следующей стации вверх, используя для ее достижения кинетическую энергию, накопленную при спуске на предыдущем отрезке пути, добавлением лишь незначительных энергетических ресурсов.
Такой пилообразный цикл движения периодически повторяется на протяжении всей гравитационной трассы (см. Обзор по межотраслевой тематике. Серия YIII "Новые виды городского общественного транспорта" ГОСИНТИ, г. Москва, 1969, 95/12 - 69).
Здесь по сути высказана идея гравитационного движения без рассмотрения необходимых технических средств для ее реализации.
Очевиден и главный недостаток перечисленных выше систем, заключающийся в том, что они ориентированы на применение транспортных средств с использованием колес как опоры и колеса как средства для создания дополнительной силы тяги, реализуемой за счет сил трения колес с рельсами или дорожным покрытием.
Такой принцип тяги принципиально не пригоден для реализации движения по гравитационным внеуличным трассам. Такой вывод основывается на том, что при движении по гравитационным трассам крутизна спусков и подъемов должна быть больше, чем принятая сейчас для тоннелей по нормам СНиП.
Ограничение крутизны спусков и подъемов сейчас, в конечном счете, лимитировано принципом тяги, основанным на сцеплении "колесо-рельс", так как в случае остановки подвижного состава в нижней точке гравитационной трассы его эвакуация оттуда проблематична при традиционном принципе тяги.
Таким образом, для реализации безопасного движения по гравитационной внеуличной трассе необходимо обеспечить контроль за ускорением подвижного состава и перейти к транспортным системам, у которых тяга реализуется посредством линейных электрических двигателей.
Известна транспортная система линейным двигателем, содержащая путевое полотно с закрепленными на наружных сторонах рельсовых нитей Г-образными направляющими, несущими вторичные элементы линейного двигателя и токоподводящие провода, транспортные средства которого расположены поверх Г-образных направляющих и сочленены с ходовой частью, выполненной в виде тележек с колесными парами и первичных элементов (индукторов) линейного двигателя (RU 2090390, В 60 L 13/03, 1997).
Недостаток транспортной системы при ее использовании на гравитационной внеуличной трассе в том, что она не обеспечивает безопасное движение по такой трассе без применения дополнительных средств.
Обеспечение безопасности движения по гравитационной внеуличной трассе в предложенном варианте достигается применением способа движения и транспортной системы для его реализации прототипом, для которых может быть принято описание (см. Обзор по межотраслевой тематике. Серия YIII "Новые виды городского общественного транспорта" ГОСИНТИ, г. Москва, 1969, 95/12 - 69 и патент RU 2090390 В 60 L 13/03, 1997).
Сущность изобретения сводится к следующему.
Движение по гравитационной внеуличной трассе основано на воздействии на транспортное средство силы гравитации с добавлением дополнительных энергетических ресурсов на создание силы тяги тяговым двигателем. При ускорении (замедлении) транспортного средства при движении по гравитационной внеуличной трассе замеряют величину его ускорения, сравнивают ее с эталонной, установленной по условиям комфорта и безопасности при перевозках пассажиров и корректируют ускорение (замедление), изменяя силу тяги тягового двигателя путем увеличения (уменьшения) подводимой к нему дополнительной энергии.
Транспортная система для движения по гравитационной внеуличной трассе, содержащая путевое полотно с закрепленными на наружных сторонах рельсовых нитей Г-образными направляющими, несущими вторичные элементы линейного двигателя и токоподводящие провода, транспортное средство, кузов которого расположен поверх Г-образных направляющих и сочленен с ходовой частью выполненного в виде тележек с колесными парами и первичных элементов (индукторов) линейного двигателя, отличающаяся тем, что транспортное средство дополнительно снабжено датчиком ускорения, эталонным блоком, блоком сравнения и регулятором подводимой энергии, причем выходы датчика ускорения и эталонного блока соединены со входом сравнения, выход которого подключен к регулятору подводимой энергии, соединенным с линейным двигателем.
Сущность изобретения иллюстрируется чертежами.
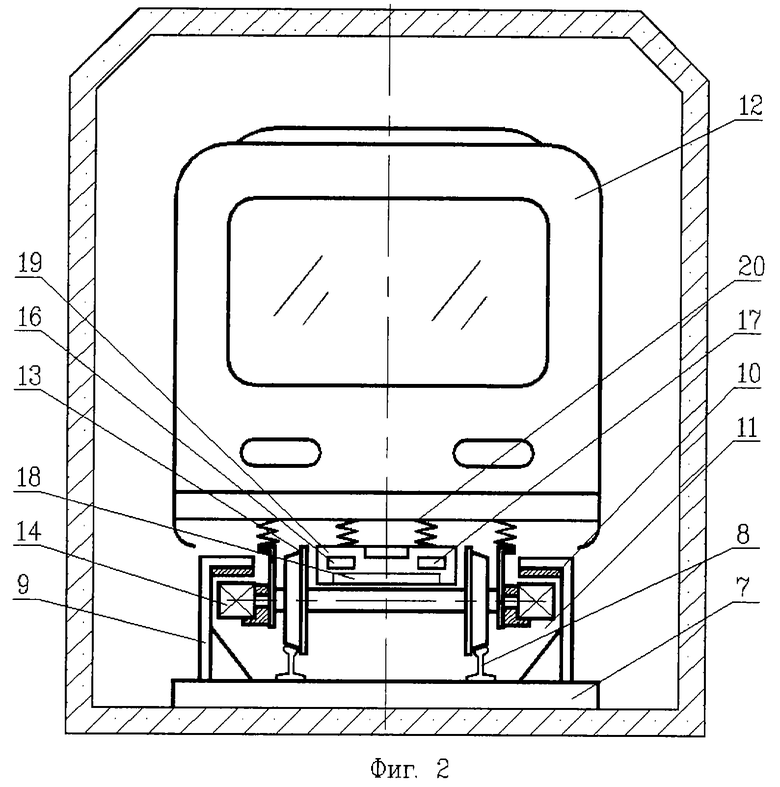
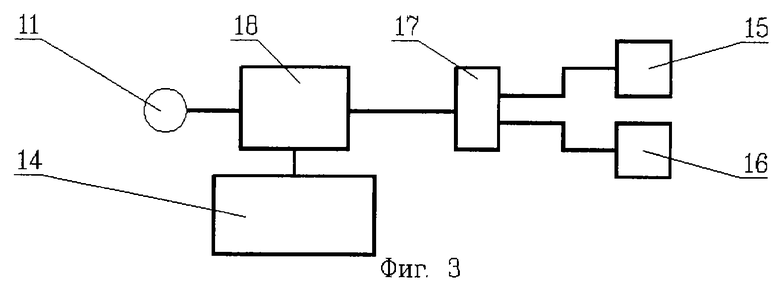
На фиг. 1 показана схема городской внеуличной трассы; на фиг.2 - то же, поперечный разрез; на фиг. 3 - функциональная схема управления линейным двигателем.
По гравитационной трассе 1, состоящей из горизонтальных участков, преимущественно станций 2, расположенных на поверхности, и участков, расположенных в тоннеле, состоящих из спусков 3, горизонтальных площадок 4 и подъемов 5, перемещается транспортное средство 6. Движение по такой трассе имеет свои особенности, так как на транспортное средство воздействуют две силы тяги: одна, связанная с действием собственной массы вагонов при перемещении по наклонной плоскости, а вторая - за счет силы тяги от тягового двигателя, установленного на транспортном средстве. При этом очевидно, что усложняются требования к тяговому двигателю и контролю за движением транспортного средства с позиций обеспечения комфорта и безопасности перевозок пассажиров.
Движение под действием силы гравитации на участках спуска и подъема, по сути, неуправляемо, и ускорение движения может превосходить допустимые нормы.
С другой стороны, применение гравитационных внеуличных трасс естественно требует прокладки тоннелей с более крутыми спусками и подъемами, превосходящими установленные нормами СНиП. Например, если на участке спуска длиной 200 м опуститься под землю на глубину 10 м, то крутизна при этом будет 50 o/оо.
Для традиционных видов транспорта, например действующих метрополитенов, такие нормы не допускаются опять-таки по причине безопасности перевозок. Однако, если перейти на новые технологии, основанные на принципе тяги, не связанном со сцеплением "колесо-рельс", а основанные на создании тяги электромагнитным полем посредством линейных двигателей, то все ограничения с крутизной спусков и подъемов, безопасностью перевозок при управлении движением по гравитационной внеуличной трассе с применением данного способа практически снимаются. Реальной становится возможность строительства метро, мини-метро, когда большинство станций можно строить на поверхности, а это сама по себе серьезная экономия при строительстве.
Пассажирам при этом не надо опускаться вверх - вниз по ступеням и тратить на это силы и время (естественно, речь не идет о тех случаях, когда необходимы подземные пересадочные узлы).
Для достижения таких целей необходимо переходить к строительству гравитационных внеуличных трасс 1 (фиг.1), содержащих станции 2, участки спуска 3, подъема 5 и горизонтальные площадки 4, а это, в свою очередь, потребует перехода на новый принцип тяги и строительства транспортных систем и транспортных средств на новой технологической основе. В первую очередь, при движении по гравитационной внеуличной трассе необходимо обеспечить комфорт и безопасность перевозок за счет управления движением, а это наиболее просто реализуется, когда вводится контроль за ускорением движения транспортного средства и его ограничением под воздействием энергетических ресурсов тягового двигателя транспортного средства.
Реализация предложенного способа движения возможна в транспортной системе, в которой транспортное средство 6 перемещается на путевом полотне 7, на котором с наружных сторон рельсовых нитей 8 закреплены Г-образные направляющие 9, несущие вторичные элементы 10 линейного двигателя и токоподводящие провода 11, кузов 12, расположенный поверх Г-образных направляющих и опирающийся на колесные тележки 13, на которых закреплен индуктор 14. На транспортном средстве дополнительно установлен датчик ускорения 15, эталонный блок 16, блок сравнения 17 и регулятор подводимой энергии 18, которые установлены в специальном контейнере 19, подвешенном на амортизаторе 20 к кузову 12.
Функциональные связи между блоками показаны на фиг.3. Сигналы с датчика ускорения 15 и от эталонного блока 16 поступают на вход блока сравнения 17, выход которого соединен с регулятором подводимой энергии 18, а вход подключен к токоподводящей сети 11. Посредством регулятора 18 изменяется сила тяги, развиваемая индуктором 14, что позволяет при движении по гравитационной внеуличной трассе поддерживать на требуемом уровне ускорение движения транспортного средства, которое зависит от неуправляемой гравитационной силы и от силы тяги линейного двигателя, развиваемой при взаимодействии между индуктором 14 и вторичным элементом 10. Структура блоков известна и не нуждается в детальном описании.
Таким образом, предложенная транспортная система позволяют перейти к строительству экономически выгодных гравитационных внеуличных трасс в крупных городах, в т.ч. и мегаполисах, и обеспечить при этом безопасность перевозок, экономный расход электроэнергии и низкий уровень эксплуатационных расходов.
Изобретение относится к области транспорта и предназначено для использования в метро, мини-метро и для эстакадного транспорта. Транспортная система основана на воздействии на транспортное средство силы гравитации и силы тяги (торможения) от линейного электродвигателя и контроле этих сил путем замера величины ускорения транспортного средства и корректировки его по условиям комфорта путем изменения подводимой энергии к тяговому линейному двигателю. Транспортная система содержит путевое полотно с закрепленными на наружных сторонах рельсовых нитей Г-образными направляющими, несущие вторичные элементы линейного двигателя, токоподводы. Транспортное средство с кузовом и ходовой частью оснащено дополнительно датчиком ускорения, эталонным блоком, блоком сравнения и регулятором подводимой энергии к линейному двигателю. 3 ил.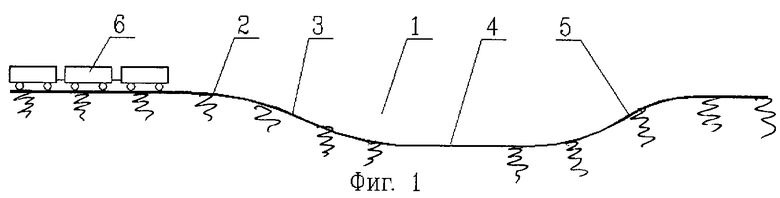
Транспортная система для движения по гравитационной внеуличной трассе, содержащая путевое полотно с закрепленными на наружных сторонах рельсовых нитей Г-образными направляющими, несущими вторичные элементы линейного двигателя и токопроводящие провода, транспортное средство, кузов которого расположен сверху Г-образных направляющих и сочленен с ходовой частью, выполненной в виде тележек, на которых закреплены первичные элементы (индукторы) линейного двигателя, отличающаяся тем, что транспортное средство снабжено датчиком ускорения, эталонным блоком, блоком сравнения и регулятором подводимой энергии, причем выходы датчика ускорения и эталонного блока соединены со входом блока сравнения, выход которого подключен к регулятору подводимой энергии, соединенному с линейным двигателем.
| US 4232372, 04.11.1980 | |||
| ТРАНСПОРТНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ХОДОВОЙ ЧАСТИ | 1995 |
|
RU2090390C1 |
| Устройство для изменения направления движения вагонов на станции | 1985 |
|
SU1268455A1 |
| ТРАНСПОРТНАЯ СИСТЕМА МАЯТНИКОВОГО ТИПА | 1993 |
|
RU2077435C1 |
| ВОЛНОВАЯ ГЕРМЕТИЧНАЯ ПЕРЕДАЧА | 0 |
|
SU266496A1 |
| Устройство для формования армоцементных плит | 1982 |
|
SU1080982A1 |

