Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ контроля динамического блока в составе системы управления (Патент РФ 2136033, МКИ6 G 05 B 23/02, 1999), основанный на интегрировании выходного и входного сигналов блока с весом e-αt, где α - вещественная константа. Применение этого способа для контроля нескольких блоков системы управления произвольной структуры приводит к необходимости интегрирования входных и выходных сигналов каждого контролируемого блока.
Наиболее близким к предлагаемому изобретению техническим решением является способ поиска неисправностей в динамических системах (Патент РФ 2143720, МКИ6 G 05 B 23/02, 1999).
Недостатком этого способа является то, что он предполагает определение функций чувствительности и отклонений амплитудной частотной характеристики от номинальной на нескольких частотах, что является достаточно трудоемкой задачей, связанной со значительными временными и аппаратными затратами.
Цель изобретения уменьшение аппаратных и временных затрат на диагностирование путем уменьшения числа используемых динамических характеристик.
Указанная цель достигается тем, что согласно изобретению предлагается новая совокупность действий.
Суть предлагаемого способа заключается в следующем.
Способ основан на использовании в качестве динамических характеристик оценок передаточных функций динамической системы, полученных путем интегральных преобразований сигналов системы (преобразований по Лапласу в области вещественных значений переменной Лапласа р=α)
 оценка изображения выходного сигнала системы;
оценка изображения выходного сигнала системы; оценка изображения входного сигнала системы;
оценка изображения входного сигнала системы;
Tk - время контроля, выбираемое из соотношения Тk≥ТПП, где ТПП - время переходного процесса динамической системы.
Использование преобразований Лапласа позволяет перейти от обработки временных функций к анализу численных значений их функционалов (Патент РФ 2136033, МКИ6 G 05 B 23/02, 1999; патенты РФ 2156494, 2159458, МКИ6 G 05 B 23/02, 2000).
В качестве диагностического признака наличия дефекта в l-м динамическом элементе предлагается интегральная мера следующего вида:
Jl = Q
где Q1(α) = ΔФ(α)-Ul(α)•ΔWl(α);
ΔФ(α) = (ΔФ1(α),ΔФ2(α),...,ΔФN(α))T - вектор оценок отклонений передаточной функции динамической системы в N контрольных точках для вещественных значений переменной Лапласа α;
вектор коэффициентов структурной чувствительности (чувствительности передаточных функций динамической системы в различных контрольных точках к изменению передаточной функции l-го динамического элемента);
ΔWl(α) - отклонение передаточной функции l-го динамического элемента от номинального значения.
Из условия минимума выражения (1) получаем
ΔФ(α) = Ul(α)•ΔWl(α),
откуда выражаем скаляр ΔWl(α):
Заменяя в выражении (1) ΔWl(α) с учетом последнего равенства, получаем после преобразований
Последнее выражение может быть представлено в развернутом для элементов векторов виде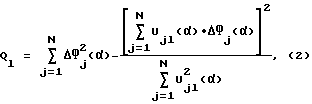
где  чувствительность передаточной функции системы для j-й контрольной точки к изменению передаточной функции l-го динамического элемента (структурная чувствительность).
чувствительность передаточной функции системы для j-й контрольной точки к изменению передаточной функции l-го динамического элемента (структурная чувствительность).
Динамический элемент, структурные чувствительности которого минимизируют значение функционала (2) для наблюдаемых отклонений ΔФj(α), принимается неисправным.
Структурную чувствительность l-го динамического элемента для k контрольных точек представим вектором
Ul(α) = (U1l(α), U2l(α), ... ,Ukl(α)).
Функционал (2) обладает следующим свойством. Если двум динамическим элементам объекта диагностирования соответствует пара векторов структурной чувствительности Ul(α) и Up(α), такая, что
Ul(α) = f(α)•Up(α), (3)
где f(α) - скалярная функция, то диагностические признаки Ql и Qp этих элементов будут равны между собой. Это свойство доказывается подстановкой элементов векторов  в выражение (2) и заменой их согласно выражению (3)
в выражение (2) и заменой их согласно выражению (3)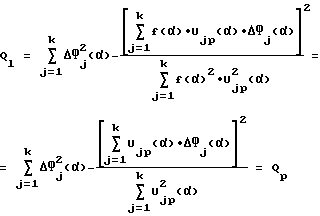
Другими словами, если векторы структурной чувствительности динамических элементов линейно зависимы, то неисправности этих элементов не различимы. Отметим, что увеличение разрядности векторов Ul(α) и Up(α) (то есть добавление новых контрольных точек) может привести к устранению свойства (3).
Рассмотрим, какие структурные особенности объекта приводят к появлению свойства (3). На чертеже приведена структурная схема объекта диагностирования, содержащего четыре динамических элемента и две контрольные точки. Динамические элементы разделим на две группы, как показано на чертеже.
Обозначим передаточную функцию замкнутой системы относительно первой контрольной точки - Ф1(р), относительно второй - Ф2(р). Структурная чувствительность первого динамического элемента определяется вектором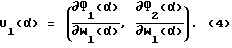
Поскольку первая группа элементов имеет один внешний вход и один внешний выход, то можно определить ее передаточную функцию. Обозначим передаточную функцию первой группы: W
Поскольку W
Аналогично для второго динамического элемента
или U1(α) = f(α)•U2(α), (6) скалярная функция, определяемая отношением коэффициентов структурной чувствительности первой группы к изменению передаточных функций элементов группы.
скалярная функция, определяемая отношением коэффициентов структурной чувствительности первой группы к изменению передаточных функций элементов группы.
Таким образом, при указанном на чертеже расположении контрольных точек при наличии одного дефекта для диагностических признаков будут справедливы соотношения: Q1=Q2, Q3=Q4.
При допущении, что дефект может возникнуть только в одном динамическом элементе, для такой системы достаточно вычислить только два диагностических признака Q1 (или Q2) и Q3 (или Q4). Если минимален Q1 (Q2), то неисправность в группе 1, иначе в группе 2. Для обеспечения заданной глубины поиска неисправностей определенную таким образом группу элементов, содержащую неисправность, разбивают на подгруппы путем введения новых контрольных точек. Разбиение на подгруппы осуществляется таким образом, чтобы ее (подгруппу) можно было заменить одним динамическим звеном. Этим достигается равенство диагностических признаков в подгруппе и экономия вычислений при определении только одного признака для подгруппы. Контрольные точки на выходах групп, для которых определено отсутствие дефектного блока, при дальнейших операциях не используются. Максимальная экономия вычислительных затрат и числа контрольных точек при отсутствии априорной информации о месте неисправности достигается путем реализации метода "половинного деления", то есть последовательного разбиения дефектной группы на две подгруппы (переноса одной контрольной точки с выхода группы блоков, не содержащих неисправный блок, вовнутрь группы, содержащей неисправный блок). При невозможности такого разбиения выбирают минимально возможное число подгрупп большее двух (в частном случае подгруппа может содержать один элемент).
Использование оценок передаточных функций динамической системы позволяет аналитически получить коэффициенты структурной чувствительности. Для этого необходимо предварительно получить аналитические выражения для частных производных передаточной функции всей динамической системы по передаточным функциям отдельных блоков, а затем произвести вычисления путем подстановки в полученные формулы номинальных значений коэффициентов передаточных функций и выбранного параметра интегрального преобразования α.
Таким образом, предлагаемый способ поиска неисправностей сводится к выполнению следующих операций.
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных m динамических элементов.
2. Предварительно определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Определяют параметр интегрального преобразования сигналов из соотношения α = 5/Тк.
4. Определяют коэффициенты чувствительности передаточных функций всей системы для каждой из m контрольных точек (выходов m блоков) к изменению передаточных функций каждого из m блоков для номинальных значений параметров передаточных функций блоков и определенного выше параметра α.
5. Подают тестовый сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
6. Регистрируют реакцию системы yjном(t), j=1, 2,..., m на интервале t∈[0, ТK] в m контрольных точках, расположенных на выходах m блоков системы, и определяют оценки входного тестового сигнала X(α) и выходных сигналов  системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают интегрирование тестового сигнала и сигналов системы управления в каждой из m контрольных точек с весами e-αt, где α = 5/Tк, для чего сигналы системы управления подают на первые входы m блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы m блоков перемножения подают на входы m блоков интегрирования, тестовый сигнал подают на первый вход (m+1)-гo блока перемножения, на второй вход которого подают экспоненциальный сигнал e-αt, выходной сигнал блока перемножения подают на вход (m+1)-го блока интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Yjном(α), j = l,...,m, и входного тестового сигнала X(α) используют для определения номинальных значений оценок передаточных функций Фjном(α) = Yjном(α)/X(α) системы.
системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают интегрирование тестового сигнала и сигналов системы управления в каждой из m контрольных точек с весами e-αt, где α = 5/Tк, для чего сигналы системы управления подают на первые входы m блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы m блоков перемножения подают на входы m блоков интегрирования, тестовый сигнал подают на первый вход (m+1)-гo блока перемножения, на второй вход которого подают экспоненциальный сигнал e-αt, выходной сигнал блока перемножения подают на вход (m+1)-го блока интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Yjном(α), j = l,...,m, и входного тестового сигнала X(α) используют для определения номинальных значений оценок передаточных функций Фjном(α) = Yjном(α)/X(α) системы.
7. Определяют минимальное количество групп динамических элементов N больше единицы, имеющих один входной сигнал и один выходной сигнал. Назначают контрольные точки для измерения выходных сигналов этих групп.
8. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал.
9. Определяют оценки передаточных функций контролируемой системы для N контрольных точек Фj(α) = Yj(α)/X(α), осуществляя операции, описанные в пункте 4.
10. Определяют отклонения оценок передаточных функций системы для N контрольных точек ΔФj(α) = Фj(α)-Фjном(α).
11. Вычисляют диагностические признаки наличия неисправности по формуле (2) для N контрольных точек.
12. По минимуму значения диагностического признака определяют дефектную группу.
13. Разбивают дефектную группу на N подгрупп, где N>1, путем назначения контрольных точек на выходах N блоков дефектной группы. Контрольные точки групп блоков, не содержащих неисправность, удаляют.
14. Повторяют операции, определенные в пунктах 7-11 до достижения заданной глубины поиска неисправности.
Рассмотрим реализацию предлагаемого способа поиска одиночной неисправности для системы, структурная схема которой представлена на чертеже. Пусть передаточные функции динамических элементов системы определяются выражениями:
Примем номинальные значения параметров передаточных функций:
K1=1; T1=5; К2=1; Т3=0,5; К3=1; Т3=5; К4=1.
Предположим, что в объекте присутствует неисправность, которая проявляется в изменении постоянной времени первого звена Т1=3 (изменение параметра настройки ПИ-регулятора).
Поиск неисправности согласно предлагаемому способу сводится к выполнению следующих операций.
1. Фиксируют число динамических элементов m=4 и глубину поиска неисправности до динамического элемента системы.
2. Путем анализа графиков номинальных переходных характеристик определяют время переходного процесса системы. Для данного примера время переходного процесса составляет ТПП=8 с. Фиксируют время контроля Тк≥ТПП. Для данного примера фиксируем Tк=10 с.
3. Определяют параметр интегрального преобразования сигналов α = 5/Тк. Для данного примера α = 0.5.
4. Определяют коэффициенты чувствительности передаточных функций всей системы для каждой из m контрольных точек к изменению передаточных функций всех динамических элементов.
Найдем коэффициент чувствительности передаточной функции системы для выходного сигнала первого блока Ф1(α) к изменению передаточной функции первого блока U11(α) = ∂Ф1(α)/∂W1(α). Передаточная функция системы для выходного сигнала первого блока определяется выражением
Дифференцируя это выражение по W1(α), получим
Подставляя в эту формулу номинальные значения коэффициентов передаточных функций и α = 0.5, будем иметь U11(α) = 0.15.
Производя аналогичные вычисления для выходных сигналов оставшихся трех блоков, получим вектор коэффициентов структурной чувствительности для первого блока:
U1(α) = (0.15, 0.12, 0.034, 0.034).
Аналогично получим векторы коэффициентов структурной чувствительности для второго, третьего и четвертого блоков:
U2(α) = (-2.07, 1.04, 0.30, 0.30);
U3(α) = (-5.80, -4.64, 0.83, 0.83);
U4(α) = (-1.66, -1.33, -0.38, 0.24).
5. Предварительно для системы с номинальными характеристиками (заведомо исправной системы) определяют номинальные значения передаточных функций для всех m контрольных точек. Для этого на вход динамической системы с номинальными характеристиками подают единичное ступенчатое воздействие и в момент его подачи начинают интегрировать выходные сигналы блоков и входной тестовый сигнал с весом e-αt. По истечении времени контроля Тк интегрирование завершают и выходные сигналы интеграторов используют для определения оценок номинальных значений передаточных функций (пункт 6 описания способа). Численное моделирование рассматриваемой задачи дает следующие значения оценок передаточных функций системы:
6. Определяют минимальное число групп динамических элементов N=2, такое, что каждая группа имеет один входной и один выходной сигналы (группа 1 и группа 2 на чертеже).
7. Назначают две контрольные точки для измерения выходных сигналов каждой группы (см. чертеж).
8. Определяют отклонение оценок передаточных функций от номинальных в каждой контрольной точке. Численное моделирование рассматриваемой задачи дает следующие значения ΔФ2(α) = -0.28, ΔФ4(α) = -0.09.
9. Вычисляют диагностические признаки наличия неисправности по формуле (2) для второго и четвертого динамического элемента. Численное моделирование этой задачи на ЭВМ дает: Q2 = 0; Q4 = 0.07.
10. По минимуму значения диагностического признака считают, что неисправность содержится в группе 1 (поскольку второй динамический элемент содержится в первой группе).
11. Дефектную (в данном случае - первую) группу разбивают на подгруппы путем назначения контрольной точки на выходе первого динамического элемента. Контрольную точку на выходе второй группы далее не используют.
12. Определяют отклонение оценки передаточной функции системы от номинальной в контрольной точке на выходе первого блока. Для рассматриваемого примера численное моделирование дает следующее значение ΔФ1(α) = -0.36.
13. Вычисляют диагностические признаки наличия неисправностей для первого и второго динамического элементов по информации снятой в двух контрольных точках (выходы первого и второго блоков). Численное моделирование на ЭВМ этой задачи дает: Q1 = 0; Q2 = 0.72.
14. По минимуму значения диагностического признака считают неисправным первый динамический элемент.
Анализ результатов применения предлагаемого способа показывает, что по сравнению с прототипом неисправность находится с использованием одного вида тестового воздействия и одного значения коэффициентов структурной чувствительности вместо нескольких значений для различных частот при использовании прототипа.
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов. Технический результат - уменьшение аппаратных и временных затрат на диагностирование путем уменьшения числа используемых динамических характеристик. Способ основан на использовании в качестве динамических характеристик оценок передаточных функций динамической системы, полученных путем интегральных преобразований сигналов системы. Неисправность находится с использованием одного вида тестового воздействия и одного значения коэффициентов структурной чувствительности вместо нескольких значений для различных частот, что имело место ранее. 1 ил.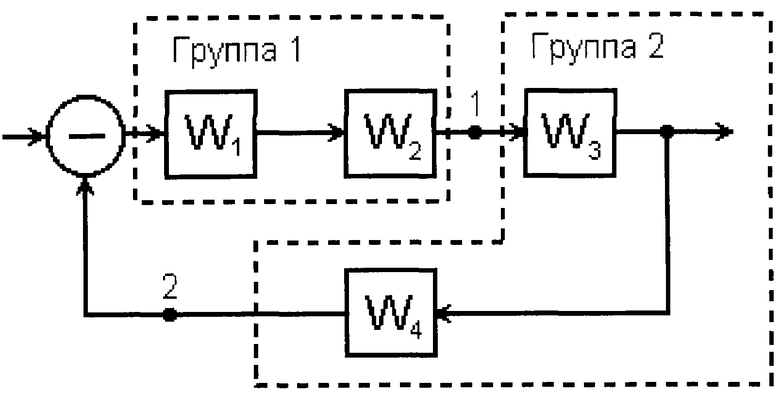
Способ поиска неисправного блока в динамической системе, основанный на фиксации количества m динамических элементов, входящих в состав системы, задании ее модели чувствительности в виде матрицы  структурной чувствительности динамической характеристики системы Ф к изменению динамических характеристик l-х динамических элементов для j-х контрольных точек Ujl= бФj/бWl, определении в цикле тестирования диагностических признаков в виде интегральной меры рассогласования модельных и реально наблюдаемых отклонений динамических характеристик для каждого l-го динамического элемента Ql, определении минимального количества групп динамических элементов N больше единицы, имеющих один выходной и один входной сигналы, назначении контрольных точек для измерения выходных сигналов этих групп, определении отклонения динамических характеристик от номинальных для выбранных контрольных точек, определении N диагностических признаков для N элементов по одному из каждой группы, по минимуму значения диагностического признака принятия решения о наличии неисправности в группе, если заданная глубина поиска неисправностей не достигнута, то повторении операций разбиения дефектной группы, назначения контрольных точек и вычисления диагностических признаков для определения дефектной подгруппы динамических элементов, отличающийся тем, что в качестве динамических характеристик системы используют оценки передаточных функций системы, полученные для вещественных значений α переменной Лапласа, фиксируют время контроля системы управления Тк≥Тпп, где Тпп - время переходного процесса системы управления, определяют значение параметра α =5/Тк, модель чувствительности определяют в виде коэффициентов чувствительности оценок передаточных функций всей системы для каждого из выходов m динамических элементов к изменению оценок передаточных функций каждого из m динамических элементов для номинальных значений параметров передаточных функций блоков и параметра α, используют тестовый сигнал, в момент подачи которого на вход системы управления с номинальными характеристиками одновременно начинают интегрирование тестового сигнала и сигналов системы управления в каждой из m контрольных точек, расположенных на выходах каждого из m динамических элементов системы, с весами e-αt, для чего сигналы системы управления подают на первые входы m блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы m блоков перемножения подают на входы m блоков интегрирования, тестовый сигнал подают на первый вход (m+1)-го блока перемножения, на второй вход которого подают экспоненциальный сигнал e-αt, выходной сигнал (m+1)-го блока перемножения подают на вход (m+1)-го блока интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Yjном(α), j = 1,..., m, и входного сигнала X(α) используют для определения номинальных значений оценок передаточных функций Фjном(α) = Yjном(α)/X(α) системы, затем замещают систему управления с номинальными характеристиками диагностируемой и повторяют операции по определению значений оценок передаточных функции Фj(α), j = 1,..., N, определяют отклонения оценок передаточных функций диагностируемой системы от номинальных ΔФj(α) = Фj(α)-Фjном(α), j= 1, ..., N, диагностические признаки определяют, используя соотношение
структурной чувствительности динамической характеристики системы Ф к изменению динамических характеристик l-х динамических элементов для j-х контрольных точек Ujl= бФj/бWl, определении в цикле тестирования диагностических признаков в виде интегральной меры рассогласования модельных и реально наблюдаемых отклонений динамических характеристик для каждого l-го динамического элемента Ql, определении минимального количества групп динамических элементов N больше единицы, имеющих один выходной и один входной сигналы, назначении контрольных точек для измерения выходных сигналов этих групп, определении отклонения динамических характеристик от номинальных для выбранных контрольных точек, определении N диагностических признаков для N элементов по одному из каждой группы, по минимуму значения диагностического признака принятия решения о наличии неисправности в группе, если заданная глубина поиска неисправностей не достигнута, то повторении операций разбиения дефектной группы, назначения контрольных точек и вычисления диагностических признаков для определения дефектной подгруппы динамических элементов, отличающийся тем, что в качестве динамических характеристик системы используют оценки передаточных функций системы, полученные для вещественных значений α переменной Лапласа, фиксируют время контроля системы управления Тк≥Тпп, где Тпп - время переходного процесса системы управления, определяют значение параметра α =5/Тк, модель чувствительности определяют в виде коэффициентов чувствительности оценок передаточных функций всей системы для каждого из выходов m динамических элементов к изменению оценок передаточных функций каждого из m динамических элементов для номинальных значений параметров передаточных функций блоков и параметра α, используют тестовый сигнал, в момент подачи которого на вход системы управления с номинальными характеристиками одновременно начинают интегрирование тестового сигнала и сигналов системы управления в каждой из m контрольных точек, расположенных на выходах каждого из m динамических элементов системы, с весами e-αt, для чего сигналы системы управления подают на первые входы m блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы m блоков перемножения подают на входы m блоков интегрирования, тестовый сигнал подают на первый вход (m+1)-го блока перемножения, на второй вход которого подают экспоненциальный сигнал e-αt, выходной сигнал (m+1)-го блока перемножения подают на вход (m+1)-го блока интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Yjном(α), j = 1,..., m, и входного сигнала X(α) используют для определения номинальных значений оценок передаточных функций Фjном(α) = Yjном(α)/X(α) системы, затем замещают систему управления с номинальными характеристиками диагностируемой и повторяют операции по определению значений оценок передаточных функции Фj(α), j = 1,..., N, определяют отклонения оценок передаточных функций диагностируемой системы от номинальных ΔФj(α) = Фj(α)-Фjном(α), j= 1, ..., N, диагностические признаки определяют, используя соотношение
после определения дефектной группы динамических элементов контрольные точки на выходах групп динамических элементов, не содержащие неисправность, удаляют.
| СПОСОБ ПОИСКА НЕИСПРАВНОСТЕЙ В ДИНАМИЧЕСКИХ СИСТЕМАХ | 1998 |
|
RU2143720C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОГО БЛОКА В СОСТАВЕ СИСТЕМЫ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2136033C1 |
| US 4851985 A, 25.07.1989 | |||
| US 4608628 A, 26.08.1986. | |||
