Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ диагностирования апериодических звеньев (патент РФ N 2110828, МКИ6 G 05 B 23/02, 1998), основанный на интегрировании выходного сигнала звена с весом e-αt, где α - вещественная константа.
Наиболее близким к предлагаемому изобретению техническим решением является способ контроля динамического блока в составе системы управления (патент РФ N 2136033, МКИ6 G 05 В 23/02, 1999).
Известно устройство диагностирования апериодических звеньев (патент РФ N 2110828, МКИ6 G 05 B 23/02, 1998), применение которого позволяет осуществлять контроль изменения параметров апериодического звена.
Наиболее близким к предлагаемому устройству техническим решением является устройство для контроля динамического блока в составе системы управления (патент РФ N 2136033, МКИ6 G 05 B 23/02, 1999), которое содержит источник тестового сигнала, блок формирования нелинейной функции, два блока перемножения, два блока интегрирования, блок деления, сумматор, схему допускового контроля, усилитель.
Недостатком этого способа и устройства является то, что они применимы только в том случае, когда на этапе контроля возможна регистрация входного и выходного сигналов контролируемого блока.
Цель изобретения - расширение функциональных возможностей способа для контроля динамических свойств блока, включенного в состав системы управления, когда во время контроля измеряется только выходной сигнал и входной тестовый сигнал системы управления, а входной и выходной сигналы контролируемого блока недоступны для измерения.
Указанная цель достигается тем, что согласно изобретению предлагается новая совокупность действий.
1. В качестве объекта контроля рассматривается динамический блок системы управления, структура которой представлена на фиг. 1. Предполагается, что во время контроля динамического блока с передаточной функцией Wк для измерения доступны только входной тестовый сигнал x0(t) и выходной сигнал всей системы y0(t). Кроме того, предполагается, что до начала этапа контроля блока Wк в составе системы управления имеется возможность подачи тестового сигнала на вход заведомо исправной системы и измерения входных и выходных сигналов динамических блоков с передаточными функциями W1-W4. Считается также, что в процессе контроля динамического блока с передаточной функцией Wк динамические свойства остальных блоков не изменяются.
2. Предварительно определяют время контроля системы управления Тк из соотношения Тк ≥ Тпп, где Тпп - время переходного процесса системы. Время переходного процесса оценивается для номинальных значений параметров системы управления.
3. Определяют номинальные значения оценок передаточных функций W1-W4 четырех динамических блоков, для чего на вход системы управления с номинальными характеристиками (заведомо исправной системы управления) подают тестовый сигнал. В качестве тестового сигнала может быть использован один из стандартных тестовых сигналов: ступенчатый, прямоугольный импульсный, линейно возрастающий, гармонический.
4. В момент подачи входного тестового сигнала начинают интегрирование с весом e-αt, где  вещественная константа, входного xi(t) и выходного yi(t) сигналов i-го динамического блока, для чего входной и выходной сигналы блока подают на первые входы первого и второго блоков перемножения соответственно, на вторые входы первого и второго блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы первого и второго блоков перемножения подают на входы первого и второго блоков интегрирования, интегрирование завершают по истечении времени Тк. Выходные сигналы интеграторов после завершения интегрирования являются оценками изображений по Лапласу для вещественного значения p = α соответствующих сигналов i-го динамического блока: Xi(α) - входного сигнала, Yi(α) - выходного сигнала.
вещественная константа, входного xi(t) и выходного yi(t) сигналов i-го динамического блока, для чего входной и выходной сигналы блока подают на первые входы первого и второго блоков перемножения соответственно, на вторые входы первого и второго блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы первого и второго блоков перемножения подают на входы первого и второго блоков интегрирования, интегрирование завершают по истечении времени Тк. Выходные сигналы интеграторов после завершения интегрирования являются оценками изображений по Лапласу для вещественного значения p = α соответствующих сигналов i-го динамического блока: Xi(α) - входного сигнала, Yi(α) - выходного сигнала.
5. Полученные на выходах интеграторов оценки изображений сигналов Yi(α) и Xi(α) попадают соответственно на первый и второй входы первого блока деления, выходной сигнал которого  фиксируют в качестве номинального значения оценки передаточной функции i-го динамического блока.
фиксируют в качестве номинального значения оценки передаточной функции i-го динамического блока.
6. Операции 3- 5 по определению и фиксации номинальных значений оценок передаточных функций выполняют для каждого из четырех динамических блоков системы.
7. Определяют оценку номинального значения передаточной функции всей системы W0(α), для чего выполняют операции 3 - 5 применительно к тестовому сигналу x0(t) и выходному сигналу y0(t) всей системы управления с номинальными характеристиками.
8. Определяют оценку номинального значения передаточной функции контролируемого блока Wкном(α), используя соотношение, связывающее передаточную функцию всей системы W0 и передаточные функции входящих в нее динамических блоков
9. На первый и второй входы третьего блока перемножения подают сигналы, численно равные оценкам W1(α) и W2(α) передаточных функций первого и второго динамических блоков соответственно, выходной сигнал третьего блока перемножения подают на первый вход четвертого блока перемножения и неинвертирующий вход первого сумматора, на второй вход четвертого блока перемножения подают сигнал, численно равный оценке W4(α) передаточной функции четвертого динамического блока, выходной сигнал четвертого блока перемножения подают на первый вход второго сумматора, на втором входе которого устанавливают напряжение, численно равное оценке передаточной функции W3(α) третьего динамического блока, выходной сигнал второго сумматора подают на первый вход пятого блока перемножения, напряжение, численно равное оценке передаточной функции W0(α) всей системы управления, подают на второй вход пятого блока перемножения и на первый вход (делимое) второго блока деления, выходной сигнал пятого блока перемножения подают на инвертирующий вход первого сумматора, выходной сигнал первого сумматора подают на второй вход (делитель) второго блока деления.
10. Выходной сигнал второго блока деления, численно равный оценке Wкном(α) номинального значения передаточной функции контролируемого динамического блока, подают на неинвертирующий вход третьего сумматора и, изменяя напряжение на его инвертирующем входе, добиваются минимального по модулю сигнала на выходе третьего сумматора.
11. Полученное напряжение на инвертирующем входе третьего сумматора фиксируют как номинальное значение Wкном(α) контролируемого параметра контролируемого динамического блока.
12. Затем переходят к контролю блока в составе системы управления, для чего замещают исправную систему контролируемой и определяют оценки изображений тестового X0(α) и выходного Y0(α) сигналов всей системы управления. Оценки X0(α) и Y0(α) определяют путем выполнения операций, определенных в пункте 4 применительно к тестовому сигналу x0(t) и выходному сигналу y0(t) всей системы управления.
13. Полученные оценки изображений сигналов Y0(α) и X0(α) подают соответственно на первый и второй входы первого блока деления, выходной сигнал первого блока деления
представляет собой оценку передаточной функции всей системы управления.
14. Определяют оценку передаточной функции контролируемого динамического блока Wк(α), для чего выходной сигнал первого блока деления, численно равный оценке передаточной функции W0(α) системы управления, подают на второй вход пятого блока перемножения и на первый вход второго блока деления и при фиксированных, установленных на этапе определения номинального значения оценки передаточной функции Wкном(α), значениях сигналов W1(α) и W2(α) на входах третьего блока перемножения, W4(α) - на втором входе четвертого блока перемножения, W3(α) - на втором входе второго сумматора, Wкном(α) - на инвертирующем входе третьего сумматора регистрируют на выходе третьего сумматора сигнал, численно равный отклонению от номинального значения оценки передаточной функции контролируемого динамического блока ΔWк(α), по величине которого судят о наличии неисправностей в нем.
Следует отметить, что предлагаемый способ не накладывает сильных ограничений на структуру контролируемой системы, поскольку многие структурные схемы многоконтурных систем управления могут быть приведены к виду, показанному на фиг. 1, путем объединения звеньев. Отсутствие динамических блоков W1 и/или W2 в конкретной системе управления в заявляемом способе может быть интерпретировано как их присутствие с единичной передаточной функцией (W1 = 1 и/или W2 = 1). В этом случае на первый и/или второй входы третьего блока перемножения в режиме контроля устанавливают сигналы единичной амплитуды. Аналогично, отсутствие динамических блоков W3 и/или W4 (W3 = 1 и/или W4 = 1) может учитываться подачей сигнала единичной амплитуды на второй вход второго сумматора и/или второй вход четвертого блока перемножения. Наконец, отсутствие обоих или одного контура (W3 = 0 и/или W4 = 0) учитывается подачей нулевых потенциалов на вторые входы соответственно второго сумматора и/или четвертого блока перемножения.
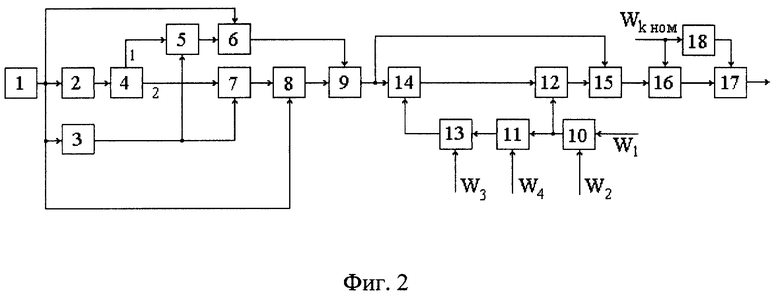
Описанный способ реализован в устройстве, функциональная схема которого представлена на фиг. 2, где:
1 - схема запуска;
2 - источник тестового сигнала;
3 - блок формирования нелинейной функции e-αt;
4 - система управления;
5 - первый блок перемножения;
6 - первый блок интегрирования;
7 - второй блок перемножения;
8 - второй блок интегрирования;
9 - первый блок деления;
10 - третий блок перемножения;
11 - четвертый блок перемножения;
12 - первый сумматор;
13 - второй сумматор;
14 - пятый блок перемножения;
15 - второй блок деления;
16 - третий сумматор;
17 - схема допускового контроля;
18 - усилитель.
Выход схемы запуска 1 соединен с управляющими входами источника тестового сигнала 2 и блока формирования нелинейной функции 3, выход источника тестового сигнала 2 соединен со входом системы управления 4, первый выход системы управления 4 соединен с первым входом первого блока перемножения 5, второй вход которого соединен с выходом блока формирования нелинейной функции 3, выход первого блока перемножения 5 соединен с сигнальным входом первого блока интегрирования 6, управляющий вход которого соединен с выходом схемы запуска 1, второй выход системы управления 4 соединен с первым входом второго блока перемножения 7, второй вход которого соединен с выходом блока формирования нелинейной функции 3, выход второго блока перемножения 7 соединен с сигнальным входом второго блока интегрирования 8, управляющий вход которого подключен к выходу схемы запуска 1, выход второго блока интегрирования 8 соединен с первым входом первого блока деления 9, второй вход которого соединен с выходом первого блока интегрирования 6, первый и второй входы третьего блока перемножения 10 предназначены для подачи напряжений уставок W1(α) и W2(α) соответственно, выход третьего блока перемножения 10 соединен с первым входом четвертого блока перемножения 11 и неинвертирующим входом первого сумматора 12, выход четвертого блока перемножения 11 соединен с первым входом второго сумматора 13, второй вход которого предназначен для подачи напряжения уставки W3(α), выход второго сумматора 13 соединен со вторым входом пятого блока перемножения 14, выход которого подключен к инвертирующему входу первого сумматора 12, выход первого сумматора 12 соединен со вторым входом второго блока деления 15, выход которого соединен с неинвертирующим входом третьего сумматора 16, выход третьего сумматора 16 соединен с сигнальным входом схемы допускового контроля 17, управляющий вход которой подключен к выходу усилителя 18, инвертирующий вход третьего сумматора 16 и вход усилителя 18 предназначены для подачи напряжения уставки Wкном(α), выход первого блока деления 9 соединен с первым входом пятого блока перемножения 14 и первым входом второго блока деления 15, второй вход четвертого блока перемножения 11 предназначен для подачи напряжения уставки W4(α).
Устройство работает следующим образом.
Схема запуска 1 одновременно запускает источник тестового сигнала 2, блок формирования нелинейной функции 3, блоки интегрирования 6 и 8. Тестовый сигнал (ступенчатый, линейно возрастающий, импульсный или гармонический) подается на вход системы управления 4.
На этапе настройки устройства контроля определяют номинальные значения оценок передаточных функций W1 - W4. При этом в качестве первого выхода системы управления используют вход i-го блока, а в качестве второго выхода - выход i-го динамического блока, многократно подают один и тот же тестовый сигнал на вход системы с номинальными характеристиками, с первого выхода системы управления поочередно снимают входные, а со второго выхода - выходные сигналы динамических блоков W1 - W4. Сигналы с выходов системы управления подают на первые входы первого 5 и второго 7 блоков перемножения соответственно, на вторые входы которых подают экспоненциальный сигнал с выхода блока формирования нелинейной функции 3. Выходные сигналы первого и второго блоков перемножения подают на сигнальные входы первого 6 и второго 8 блоков интегрирования соответственно. По истечении времени контроля Тк на выходах первого и второго блоков интегрирования формируются сигналы, численно равные оценкам изображений входного Xi(α) и выходного Yi(α) сигналов соответствующего динамического блока системы (i= 1, 2, 3, 4). Сигналы Yi(α) и Xi(α) подают соответственно на первый и второй входы первого блока деления 9, на выходе которого формируется сигнал, численно равный оценке передаточной функции Wi(α) (i = 1, 2, 3, 4) соответствующего динамического блока. Сигналы Wi(α), i = 1, 2, 3, 4, фиксируют и используют далее на этапе контроля в качестве уставок: W1(α) и W2(α) в качестве напряжений уставок на первом и втором входах третьего блока перемножения 10, W3(α) - на втором входе второго сумматора 13, W4(α) - на втором входе четвертого блока перемножения 11. Затем подают тот же тестовый сигнал на вход системы с номинальными характеристиками и используют в качестве первого выхода системы управления входной тестовый сигнал x0(t), в качестве второго выхода - выходной сигнал всей системы управления y0(t). По истечении времени контроля Тк на выходе первого блока деления 9 формируется сигнал, численно равный оценке номинального значения передаточной функции всей системы W0(α), а на выходе второго блока деления 15 - сигнал, численно равный оценке номинального значения передаточной функции контролируемого блока Wк(α). Этот сигнал поступает на неинвертирующий вход третьего сумматора 16, на инвертирующем входе которого изменяют напряжение, добиваясь минимального по модулю сигнала на его выходе. Полученное на инвертирующем входе третьего сумматора напряжение фиксируют как номинальное значение контролируемого параметра Wкном(α) контролируемого динамического блока. Напряжение Wкном(α) используют в качестве уставки на входе усилителя 18 и инвертирующем входе третьего сумматора 16 на этапе контроля.
Затем переходят к контролю блока в составе системы управления, для чего замещают исправную систему контролируемой, подают тестовый сигнал, аналогичный тому, который использовался на этапе настройки, на вход системы, в качестве первого выхода системы используют входной тестовый сигнал x0(t), в качестве второго выхода системы - выходной сигнал всей системы y0(t). По истечении времени контроля Тк на выходе первого блока деления 9 формируется сигнал, численно равный оценке передаточной функции контролируемой системы управления, а на выходе второго блока деления 15 - сигнал, численно равный оценке передаточной функции контролируемого блока Wк(α). Этот сигнал поступает на неинвертирующий вход третьего сумматора, на выходе которого формируется сигнал, численно равный отклонению от номинального значения оценки передаточной функции контролируемого блока ΔWк(α). Усилитель 18 имеет коэффициент усиления β < 1 и служит для получения опорного напряжения схемы допускового контроля 17. Опорное напряжение определяет максимально допустимое отклонение контролируемого параметра ΔWк(α).
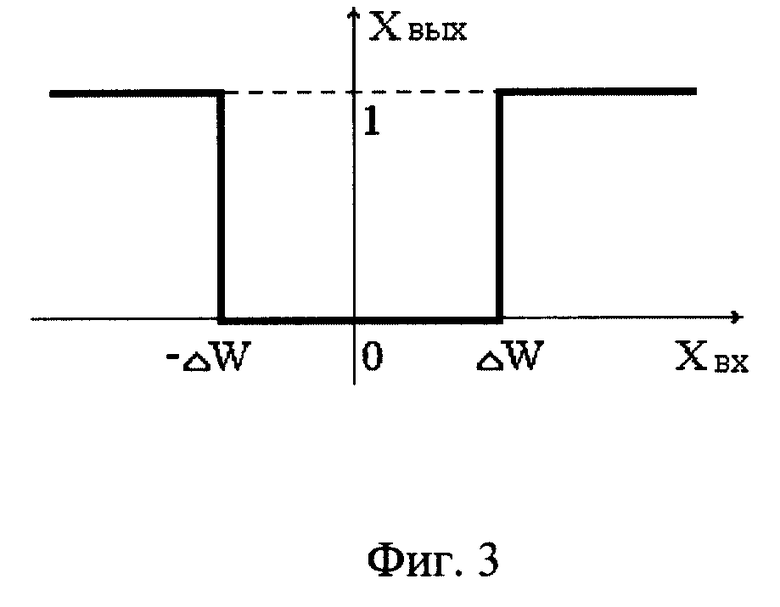
Схема допускового контроля 17 представляет собой нелинейный блок с релейной статической характеристикой, представленной на фиг. 3. Выходной сигнал блока допускового контроля принимает значение 0 при нахождении контролируемого параметра в зоне допуска (-ΔW,+ΔW) и значение 1 - при выходе контролируемого параметра за пределы указанного интервала. Допустимое относительное отклонение контролируемого параметра задается коэффициентом усиления усилителя 18
Использование одних и тех же электронных блоков как на этапе получения номинального контролируемого параметра Wкном(α), так и на этапе его контроля, позволяет устранить ошибки контроля, связанные с применением неадекватной номинальной модели, погрешностями операционных блоков и блоков формирования сигналов.
Предлагаемый способ и устройство позволяют контролировать состояние динамического блока системы в динамическом режиме без доступа к его входному и выходному сигналам.
Способ контроля динамического блока и устройство для его осуществления относятся к диагностированию систем автоматического управления и их элементов. Технический результат заключается в расширении функциональных возможностей при контроле динамических свойств блока, включенного в состав системы управления. В качестве объекта контроля рассматривается динамический блок с передаточной функцией системы управления фиксированной структуры, состоящей из четырех динамических блоков. Предварительно определяют номинальные значения оценок передаточных функций динамических блоков, определяют оценку передаточной функции всей системы, определяют оценку номинального значения передаточной функции контролируемого блока исходя из полученных номинальных значений передаточных функций системы, затем переходят к контролю блока в составе системы управления, для чего замещают исправную схему контролируемой и определяют отклонение от номинального значения оценки передаточной функции контролируемого динамического блока, по величине которого судят о наличии неисправностей в нем. Устройство для контроля динамического блока содержит схему запуска, источник тестового сигнала, блок формирования нелинейной функции, пять блоков перемножения, три сумматора, два блока деления, усилитель, схему допускового контроля. 2 c.п.ф-лы, 3 ил.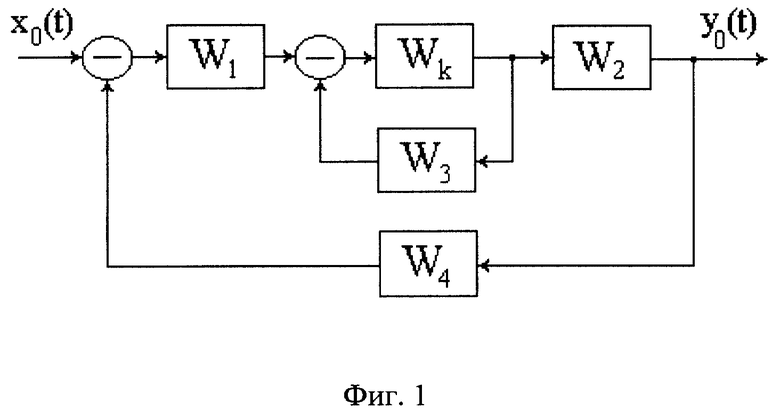
содержащей помимо контролируемого четыре динамических блока с передаточными функциями W1 - W4, предварительно определяют путем выполнения указанной выше последовательности операций последовательно для каждого из четырех динамических блоков номинальные значения оценок передаточных функций этих блоков W1(α) - W4(α), определяют номинальное значение оценки передаточной функции всей системы управления W0ном(α), для чего выполняют указанные выше операции применительно к тестовому сигналу х0(t) и выходному сигналу у0(t) всей системы управления с номинальными характеристиками, определяют номинальное значение оценки передаточной функции контролируемого динамического блока Wkном(α), для чего на первый и второй входы третьего блока перемножения подают сигналы, численно равные номинальным значениям оценок передаточных функций W1(α) и W2(α) первого и второго динамических блоков системы управления соответственно, выходной сигнал третьего блока перемножения подают на первый вход четвертого блока перемножения и неинвертирующий вход первого сумматора, на второй вход четвертого блока перемножения подают сигнал, численно равный номинальному значению оценки передаточной функции W4(α) четвертого динамического блока, выходной сигнал четвертого блока перемножения подают на первый вход второго сумматора, на втором входе которого устанавливают сигнал, численно равный номинальному значению оценки передаточной функции W3(α) третьего динамического блока, выходной сигнал второго сумматора подают на первый вход пятого блока перемножения, сигнал, численно равный номинальному значению оценки передаточной функции W0ном(α) всей системы управления, подают на второй вход пятого блока перемножения и на первый вход второго блока деления, выходной сигнал пятого блока перемножения подают на инвертирующий вход первого сумматора, выходной сигнал первого сумматора подают на второй вход второго блока деления, выходной сигнал второго блока деления, численно равный номинальному значению оценки Wkном(α) передаточной функции контролируемого динамического блока, подают на неинвертирующий вход третьего сумматора и, изменяя напряжение на его инвертирующем входе, добиваются минимального по модулю сигнала на выходе третьего сумматора, полученное напряжение на инвертирующем входе третьего сумматора фиксируют как номинальное значение оценки передаточной функции Wkном(α) контролируемого динамического блока, затем переходят к контролю динамического блока в составе системы управления, причем после замещения системы управления с номинальными характеристиками контролируемой определяют указанным выше образом значение оценки передаточной функции всей системы управления применительно к тестовому сигналу и выходному сигналу системы управления, выходной сигнал первого блока деления, численно равный значению оценки передаточной функции W0(α) системы управления, подают на второй вход пятого блока перемножения и на первый вход второго блока деления и при фиксированных, установленных на этапе определения номинального значения оценки передаточной функции Wkном(α), номинальных значениях оценок передаточных функций W1(α) и W2(α) на входах третьего блока перемножения, W4(α) - на втором входе четвертого блока перемножения, W3(α) - на втором входе второго сумматора, Wkном(α) - на инвертирующем входе третьего сумматора, регистрируют на выходе третьего сумматора сигнал, численно равный отклонению от номинального значения оценки передаточной функции контролируемого динамического блока ΔWк(α), по величине которого судят о наличии неисправностей в нем.
где Wk - передаточная функция контролируемого динамического блока;
W1 - W4 - передаточные функции динамических блоков системы управления,
содержащее схему запуска, источник тестового сигнала, блок формирования нелинейной функции, первый и второй блоки перемножения, первый и второй блоки интегрирования, первый блок деления, усилитель, третий сумматор, схему допускового контроля, причем выход схемы запуска соединен с управляющими входами источника тестового сигнала и блока формирования нелинейной функции, выход источника тестового сигнала соединен со входом системы управления, первый выход системы управления соединен с первым входом первого блока перемножения, второй вход которого соединен с выходом блока формирования нелинейной функции, выход первого блока перемножения соединен с сигнальным входом первого блока интегрирования, управляющий вход которого соединен с выходом схемы запуска, второй выход системы управления соединен с первым входом второго блока перемножения, второй вход которого соединен с выходом блока формирования нелинейной функции, выход второго блока перемножения соединен с сигнальным входом второго блока интегрирования, управляющий вход которого подключен к выходу схемы запуска, выход второго блока интегрирования соединен с первым входом первого блока деления, второй вход которого соединен с выходом первого блока интегрирования, выход третьего сумматора соединен с сигнальным входом схемы допускового контроля, управляющий вход которой подключен к выходу усилителя, отличающееся тем, что в него дополнительно введены третий, четвертый и пятый блоки перемножения, первый и второй сумматоры, второй блок деления, выход третьего блока перемножения соединен с первым входом четвертого блока перемножения и неинвертирующим входом первого сумматора, выход четвертого блока перемножения соединен с первым входом второго сумматора, выход второго сумматора соединен со вторым входом пятого блока перемножения, выход которого подключен к инвертирующему входу первого сумматора, выход первого сумматора соединен со вторым входом второго блока деления, выход которого соединен с неинвертирующим входом третьего сумматора, выход первого блока деления соединен с первым входом пятого блока перемножения и первым входом второго блока деления, причем первый и второй входы третьего блока перемножения, второй вход второго сумматора и второй вход четвертого блока перемножения предназначены соответственно для подачи напряжений уставок, соответствующих W1(α),W2(α),W3(α) и W4(α), где W1(α),W2(α),W3(α) и W4(α) - номинальные значения оценок передаточных функций динамических блоков системы управления, инвертирующий вход третьего сумматора и вход усилителя предназначены для подачи напряжения уставки, соответствующего Wkном(α) где Wkном(α) - номинальное значение оценки передаточной функции контролируемого блока.
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОГО БЛОКА В СОСТАВЕ СИСТЕМЫ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2136033C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ АПЕРИОДИЧЕСКИХ ЗВЕНЬЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2110828C1 |
| SU 1300419 A1, 30.03.1987 | |||
| ПИРОЗАМОК С ПИРОГАЗОВОЙ АМОРТИЗАЦИЕЙ | 2007 |
|
RU2354923C1 |
