Изобретение относится к области контроля и диагностирования систем автоматического управления.
Известен способ диагностирования линейных динамических объектов, поиск неисправностей по которому осуществляется в предположении, что в объекте могут иметь место только одиночные параметрические отклонения (Авторское свидетельство СССР N 1300419, М. кл. G 05 B 23/02, 1987).
Наиболее близким к предлагаемому способу техническим решением является способ диагностирования апериодических звеньев (Положительное решение от 18.06.97 по заявке N 96112627/09(018726)), основанный на интегрировании выходного сигнала звена с весом l-αt, где α - вещественная константа.
Известно устройство диагностирования линейных динамических объектов, применение которого позволяет осуществлять поиск одиночных параметрических неисправностей (Авторское свидетельство СССР N 1300419, М. кл. G 05 B 23/02, 1987).
Наиболее близким к предлагаемому устройству техническим решением является устройство диагностирования апериодических звеньев (Положительное решение от 18.06.97 по заявке N 96112627/09(018726)), которое содержит источник тестового воздействия, блоки формирования нелинейной функции, перемножения, интегрирования, деления, четыре усилителя, три сумматора.
Недостатком этого способа и устройства является то, что они применимы для диагностирования звеньев конкретного вида и не позволяют осуществлять контроль динамических свойств блока, функционирующего в составе системы управления произвольной структуры.
Цель изобретения - расширение функциональных возможностей способа для контроля динамических свойств блока, включенного в состав системы управления произвольной структуры.
Указанная цель достигается тем, что, согласно изобретению, предлагается новая совокупность действий.
1. В качестве объекта контроля рассматривается динамический блок системы управления произвольной структуры. Ограничений на место включения блока в систему не накладывается. Предполагается, что возможна регистрация входного и выходного сигналов контролируемого блока и подача тестового воздействия на вход системы управления. Таким образом, в процессе контроля блока системы управления используются два выхода системы: выход 1 - вход контролируемого блока и выход 2 - выход контролируемого блока (фиг. 1).
2. Предварительно определяют время контроля системы управления Tk из соотношения Tk ≥ Tпп где Tпп - время переходного процесса системы. Время переходного процесса оценивается для номинальных значений параметров системы управления.
3. Определяют номинальное значение контролируемого параметра динамического блока, для чего на вход системы управления с номинальными характеристиками (заведомо исправной системы управления) подают тестовый сигнал. В качестве тестового сигнала может быть использован один из стандартных тестовых сигналов - ступенчатый, прямоугольный импульсный, линейно возрастающий, гармонический.
4. В момент подачи входного тестового сигнала начинают интегрирование с весом l-αt, где  вещественная константа, входного y1(t) и выходного y2(t) сигналов контролируемого динамического блока, снятых с выходов 1 и 2 системы управления. Интегрирование завершают по истечении времени Tk. Выходные сигналы интеграторов после интегрирования есть оценки изображений по Лапласу для вещественного значения p = α соответствующих сигналов контролируемого блока: Y1(α) - входного сигнала блока, Y2(α) - выходного сигнала блока.
вещественная константа, входного y1(t) и выходного y2(t) сигналов контролируемого динамического блока, снятых с выходов 1 и 2 системы управления. Интегрирование завершают по истечении времени Tk. Выходные сигналы интеграторов после интегрирования есть оценки изображений по Лапласу для вещественного значения p = α соответствующих сигналов контролируемого блока: Y1(α) - входного сигнала блока, Y2(α) - выходного сигнала блока.
5. Полученные оценки сигналов Y2(α) и Y1(α) подают соответственно на первый и второй входы делительного устройства, выходной сигнал блока деления
представляет собой оценку передаточной функции контролируемого блока p = α и принимается в качестве номинального значения контролируемого параметра динамического блока.
6. Выходной сигнал блока деления, численно равный номинальному значению контролируемого параметра динамического блока, подают на неинвертирующий вход сумматора и, изменяя напряжение на втором (инвертирующем) его входе, добиваются минимального по модулю сигнала на выходе сумматора.
7. Полученное напряжение на втором входе сумматора фиксируют как номинальное значение Wном(α) контролируемого параметра динамического блока.
8. При контроле динамического блока в составе системы управления замещают исправную систему контролируемой, подают на ее вход аналогичный тестовый сигнал, выполняют операции, определенные в пунктах 4 и 5, подают выходной сигнал блока деления W(α) на неинвертирующий вход сумматора и по величине выходного сигнала сумматора при фиксированном, определенном ранее напряжении уставки Wном(α) на втором (инвертирующем) его входе судят о наличии неисправности в контролируемом динамическом блоке.
Следует отметить, что предлагаемый способ является универсальным относительно структуры системы управления и вида передаточных функций динамических блоков, входящих в ее состав, поскольку никаких ограничений на тип передаточных функций блоков при реализации способа не накладывалось. Кроме того, при фиксированных и одинаковых характеристиках тестового сигнала на этапах получения номинальных и текущих значений контролируемых параметров, способ позволяет контролировать динамический блок в системе управления, содержащей нелинейности.
Описанный способ реализован в устройстве, функциональная схема которого представлена на фиг. 2, где:
1 - схема запуска;
2 - источник тестового сигнала;
3 - блок формирования нелинейной функции l-αt;
4 - система управления;
5 - первый блок перемножения;
6 - первый блок интегрирования;
7 - второй блок перемножения;
8 - второй блок интегрирования;
9 - блок деления;
10 - сумматор;
11 - схема допускового контроля;
12 - усилитель.
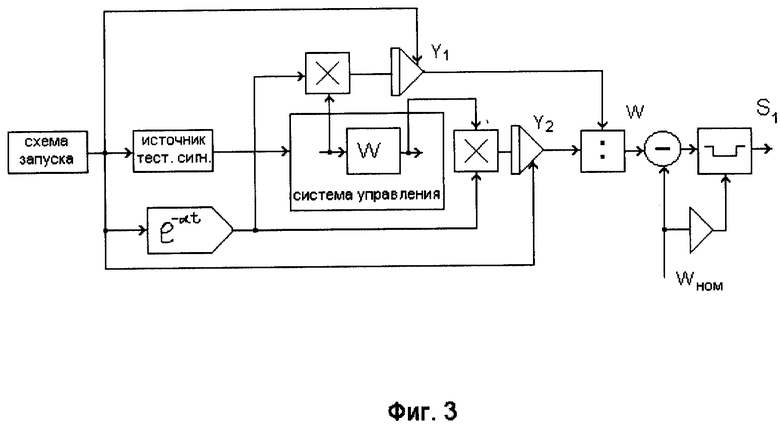
На фиг. 3 представлена структурная схема аналогового устройства, реализующего способ.
Выход схемы запуска 1 соединен с управляющими входами источника тестового сигнала 2 и блока формирования нелинейной функции 3, выход источника тестового сигнала 2 соединен со входом системы управления 4, первый выход системы управления 4, представляющий собой вход контролируемого динамического блока, соединен с первым входом первого блока перемножения 5, второй вход которого соединен с выходом блока формирования нелинейной функции 3, выход первого блока перемножения 5 соединен с сигнальным входом первого блока интегрирования 6, управляющий вход которого соединен с выходом схемы запуска 1, второй выход системы управления 4, представляющий собой выход контролируемого динамического блока, соединен с первым входом второго блока перемножения 7, второй вход которого соединен с выходом блока формирования нелинейной функции 3, выход второго блока перемножения 7 соединен с сигнальным входом второго блока интегрирования 8, управляющий вход которого соединен с выходом схемы запуска 1, выход второго блока интегрирования 8 соединен с первым входом (делимое) блока деления 9, второй вход которого (делитель) соединен с выходом первого блока интегрирования 6, выход блока деления 9 соединен с первым (неинвертирующим) входом сумматора 10, второй (инвертирующий) вход которого служит для подачи напряжения уставки Wном(α), выход сумматора 10 соединен с сигнальным входом схемы допускового контроля 11, управляющий вход которой соединен с выходом усилителя 12, вход усилителя 12 предназначен для подачи напряжения уставки Wном(α).
Устройство работает следующим образом.
Схема запуска 1 одновременно запускает источник тестового сигнала 2, блок формирования нелинейной функции 3, блоки интегрирования 6 и 8. Тестовый сигнал (ступенчатый, линейно возрастающий, импульсный или гармонический) подается на вход системы управления 4. Сигнал с первого выхода системы управления 4 y1(t), представляющий собой входной сигнал контролируемого динамического блока, подается на первый вход первого блока перемножения 5, на второй вход которого подается сигнал l-αt с выхода блока формирования нелинейной функции 3, произведение этих сигналов интегрируется первым блоком интегрирования 6, на выходе которого формируется сигнал, численно равный, по истечении времени Tk, оценке изображения входного сигнала контролируемого динамического блока Y1(α).
Аналогично, сигнал со второго выхода системы управления 4 y2(t), представляющий собой выходной сигнал контролируемого динамического блока, подается на первый вход второго блока перемножения 7, на второй вход которого подается нелинейный сигнал l-αt с выхода блока формирования нелинейной функции 3, произведение сигналов y2(t) и l-αt интегрируется вторым блоком интегрирования 8, на выходе которого формируется сигнал, численно равный, по истечении времени Tk, оценке изображения Y2(α) выходного сигнала контролируемого динамического блока.
Сигналы Y2(α) и Y1(α) подают соответственно на первый и второй входы блока деления 9, на выходе которого формируется сигнал, численно равный оценке передаточной функции W(α) контролируемого динамического блока для вещественного значения переменной Лапласа p = α.
На этапе настройки устройства контроля оценку W(α) получают для исправной системы управления и производят компенсацию этого сигнала изменением уставки Wном(α) путем минимизации сигнала на выходе сумматора 10.
Полученную уставку принимают в качестве номинального значения контролируемого параметра динамического блока и оставляют неизменной, когда вместо исправной системы управления к устройству подключают контролируемую систему и производят ее тестирование входным сигналом, аналогичным тому, который использовался на этапе настройки устройства.
Усилитель 12 имеет коэффициент усиления β < 1, и служит для получения опорного напряжения схемы допускового контроля 11. Опорное напряжение определяет максимально допустимое отклонение контролируемого параметра ΔW(α).
Схемы допускового контроля 11 представляет собой нелинейный блок с релейной статической характеристикой, представленной на фиг. 4. Выходной сигнал блока допускового контроля принимает значение 0 при нахождении контролируемого параметра в зоне допуска (-ΔW, +ΔW) и значение 1 - при выходе контролируемого параметра за пределы указанного интервала. Допустимое относительное отклонение контролируемого параметра задается коэффициентом усиления усилителя 12
Использование одних и тех же электронных блоков как на этапе получения номинального контролируемого параметра Wном(α), так и на этапе его контроля, позволяет устранить ошибки контроля, связанные с применением неадекватной номинальной модели, погрешностями операционных блоков и блоков формирования сигналов.
Предлагаемый способ и устройство являются универсальными относительно порядка включения и вида передаточных функций блоков системы управления и позволяют контролировать состояние динамического блока системы в динамическом режиме без разрывов связей.


Изобретения относятся к области контроля и диагностирования систем автоматического управления. Технический результат изобретений заключается в расширении функциональных возможностей способа и устройства для контроля динамических свойств блока, включенного в состав управления произвольной структуры. Способ заключается в том, что предварительно определяют время контроля системы управления, определяют номинальное значение контролируемого параметра блока, для чего на вход системы управления подают тестовый сигнал, в момент подачи тестового сигнала начинают интегрирование входного и выходного сигналов контролируемого объекта, полученные оценки сигналов подают на входы делительного устройства, выходной сигнал делительного устройства подают на неинвертирующий вход сумматора, изменяя напряжение на втором входе сумматора добиваются минимального по модулю сигнала на его выходе, полученное напряжение на втором входе сумматора фиксируют как номинальное значение контролируемого параметра динамического блока, исправную систему заменяют контролируемой, подают на его вход аналогичный тестовый сигнал, выполняют вышеперечисленные операции и по величине выходного сигнала сумматора судят о наличии неисправностей. Устройство контроля динамического блока в составе системы управления содержит схему запуска, источник тестового сигнала, блок формирования нелинейной функции, два блока перемножения, два блока интегрирования, блок деления, усилитель, сумматор, схему допускового контроля. 2 с. п. ф-лы, 4 ил.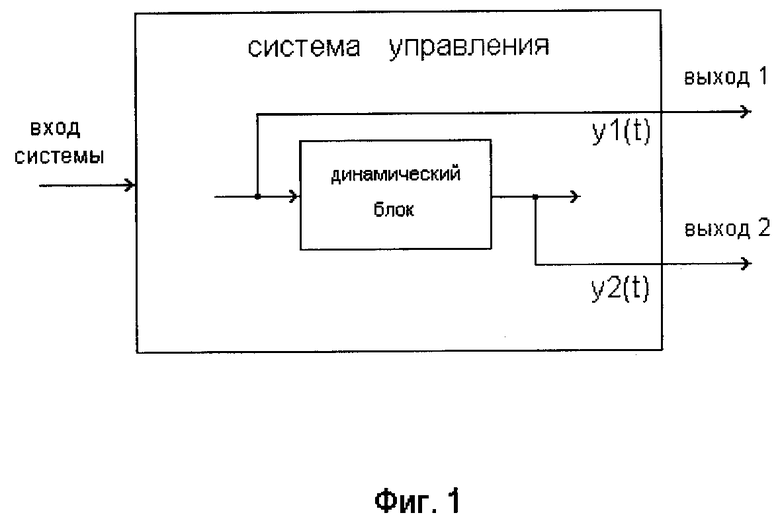
| СПОСОБ ДИАГНОСТИРОВАНИЯ АПЕРИОДИЧЕСКИХ ЗВЕНЬЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2110828C1 |
| SU 1300419 A1, 30.03.87 | |||
| Устройство для контроля параметров инерционных звеньев | 1979 |
|
SU873248A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| Основы автоматического регулирования/Под ред | |||
| Солодовникова В.В.-М.: Гос | |||
| научно-техническое изд-во машиностроительной литературы, 1954, т.1, гл | |||
| УП | |||
| Арендт В.Р | |||
| и Сэвент К.Дж | |||
| Практика следящих систем.-М.-Л.: Гос.энергетическое изд-во, 1962, с.166-169, табл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
