Изобретение относится к машиностроению, к станкостроению, к станкам токарной группы и предназначено для механической обработки уплотнительных поверхностей, преимущественно корпусов клиновых задвижек при их ремонте.
Известен переносной станок для растачивания цилиндров поршневых механизмов (М.Н. Крыница. Механизация слесарно-монтажных работ на судах. Л.: Судостроение, 1976, с. 258-260). Станок содержит пустотелую борштангу, установленную в разнесенных подшипниках скольжения с возможностью вращения. На борштанге установлена двухрезцовая головка с возможностью принудительного осевого перемещения под действия ходового винта и механизма подачи. Привод вращения борштанги осуществляется от электродвигателя через клиноременную передачу и червячный редуктор. Наличие сменных шкивов клиноременной передачи обеспечивает шесть ступеней частоты вращения борштанги.
Недостаток переносного станка заключается в высокой погрешности его базирования, в невозможности обработки корпуса с одной установки, в невозможности обеспечения необходимого соответствия угловых параметров запорных элементов и уплотнительных поверхностей в корпусах клиновых задвижек.
Известен переносной станок для механической обработки (патент РФ 2144449, МПК В 23 В 41/00, публ. 20.01.2000 г.), содержащий приводной двигатель, привод главного движения резца, привод автоматической подачи резца, резцедержатель с ручным винтовым приводом поперечной подачи и врезания резца, резцедержатель с ручным винтовым приводом поперечной подачи и врезания резца, корпус с элементами базирования, центрирования и крепления. Кинематическая схема станка обеспечивает совмещение в одном приводе главного движения и подачи резца.
Недостатком известного переносного станка для механической обработки является сложность конструкции, неудобство в эксплуатации и недостаточная точность обработки в связи с низкой жесткостью конструкции.
Предложенное изобретение направлено на упрощение конструкции, повышение удобства в эксплуатации и повышение точности обработки за счет создания эффективной системы базирования и настройки станка относительно обрабатываемой поверхности.
Поставленная задача достигается мобильным токарным устройством для обработки торцов крупногабаритных обечаек, содержащим приводной двигатель, обеспечивающий главное движение резца и автоматическую поперечную подачу резца, ручной привод поперечной подачи резца, резцедержатель с ручным винтовым приводом врезания резца, корпус с элементами крепления относительно обрабатываемой поверхности, в котором в отличие от прототипа привод главного движения выполнен в виде первой и второй последовательно соединенных планетарных ступеней по схеме 2К-Н, смонтированных на общей неподвижной оси, скрепленной с механизмом регулировки угла обработки, причем первая планетарная ступень снабжена неподвижным водилом, на котором закреплен приводной двигатель, на валу которого закреплена солнечная шестерня, а вторая планетарная ступень выполнена в виде дифференциала, центральные шестерни которого с противоположных торцов снабжены соосными зубчатыми венцами, сцепленными с сателлитами первой ступени, при этом на оси одного из сателлитов второй ступени закреплен блок шестерен, кинематически связанный с винтовым механизмом суппорта автоматической поперечной подачи резца, а на внешней образующей трубчатого корпуса размещены равнорасположенные по окружности радиальные раздвижные опоры, сгруппированные в два ряда по три опоры в каждом, причем опоры одного из рядов выполнены в виде двухрычажных шарнирных механизмов, одни концы которых соединены с трубчатым корпусом, а другие - со скользящим вдоль него ползуном, который посредством радиальных пальцев, расположенных в продольных пазах трубчатого корпуса, соединен с жестким диском, скрепленным со штоком силового цилиндра, который снабжен ходовым винтом ручного привода поршня, шарнирно скрепленным с поршнем и размещенным в резьбе на крышке цилиндра.
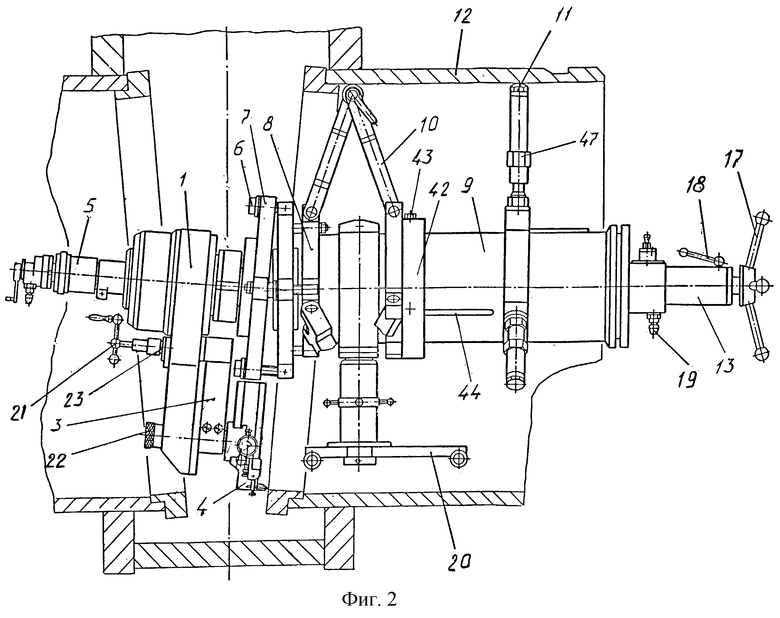
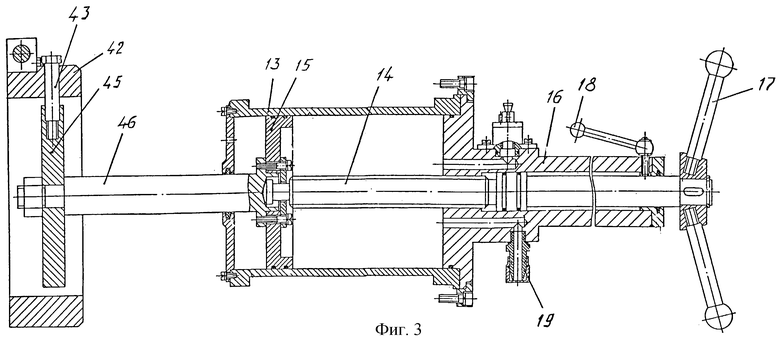
На чертежах иллюстрируется пример реализации изобретения - мобильное токарное устройство для обработки торцов крупногабаритных обечаек, фиг.1 - кинематическая схема устройства, фиг.2 - общий вид устройства, установленного в корпусе задвижки, фиг.3 - конструкция силового цилиндра.
Устройство (см. фиг.1 и фиг.2) содержит траверсу 1, посаженную на неподвижную ось 2. На конце траверсы размещен суппорт 3 автоматической поперечной подачи и резцедержатель 4 с ручным винтовым приводом врезания резца. Вращение траверсы (главное движение) и автоматическая поперечная подача суппорта обеспечиваются приводным двигателем 5, закрепленным относительно неподвижной оси 2, на которой закреплен также механизм регулировки угла обработки, содержащий регулировочные гайки 6, шарнирные звенья 7 и 8, соединенные соответственно с неподвижной осью 2 и трубчатым корпусом 9.
На внешней образующей трубчатого корпуса размещены равнорасположенные по окружности радиальные раздвижные опоры 10 и 11, обеспечивающие жесткое крепление устройства внутри обрабатываемой обечайки 12.
Противоположный торец трубчатого корпуса скреплен с силовым пневмоцилиндром 13, кинематически связанным с радиальными раздвижными опорами 10. Силовой цилиндр (фиг.3) снабжен винтом 14, шарнирно соединенным с поршнем 15 и размещенным в резьбе на крышке 16 пневмоцилиндра.
На винт 14 насажен штурвал 17 и рукоятка-фиксатор 18. Воздух в пневмоцилиндр подается через штуцер 19.
Для перемещения вдоль обрабатываемой обечайки и для регулировки положения оси вращения траверсы по высоте устройство имеет тележку-домкрат 20, закрепленную на трубчатом корпусе 9.
Для ручного возврата суппорта 3 в исходное положение мобильное токарное устройство имеет съемную рукоятку 21.
Для установки глубины врезания токарное устройство имеет головку 22 с лимбом отсчета.
Для установки величины подачи S мм/об устройство имеет кнопку 23, расположенную под съемной рукояткой 21.
Приводной двигатель 5 установлен на неподвижном водиле 24 (см. фиг.1) первой планетарной ступени, выполненной по схеме 2К-Н. Неподвижное водило скреплено с осью 2. На валу двигателя установлена солнечная шестерня 25 (Z1), сцепленная с сателлитами 26 (Z2). Здесь и далее Zi - число зубьев.
Вторая планетарная ступень, выполненная в виде дифференциала по схеме 2К-Н, смонтирована в траверсе 1 и состоит из центральных колес 27 (Zа) и 28 (Zв), сцепленных с сателлитами 29 (Zд). Центральные колеса 27 и 28 с противоположных торцов снабжены соосными зубчатыми венцами 30 (Z3) и 31 (Z4), сцепленными с сателлитами 26 первой планетарной ступени.
На оси одного из сателлитов 29 второй планетарной ступени закреплен блок шестерен 32 (Z5) и 33 (Z7), сцепленный с шестернями 34 (Z6) и 35 (Z8), передающими вращение на вал 36 посредством вытяжной шпонки 37. На конце вала 36 закреплена коническая шестерня 38 (Z9), сцепленная с конической шестерней 39 (Z10), взаимодействующей с ходовым винтом 40, который через фрикционную муфту 41 соединен с суппортом 3 автоматической подачи резца.
Раздвижные опоры 10 (см. фиг.2) выполнены в виде двухрычажных шарнирных механизмов, концы которых шарнирно соединены соответственно с трубчатым корпусом 9 и со скользящим вдоль него ползуном 42, который посредством радиальных пальцев 43, расположенных в продольных пазах 44 трубчатого корпуса, соединен с жестким диском 45, скрепленным со штоком 46 поршня 15 (см. фиг.3).
Раздвижные опоры 11 имеют радиальный ход по резьбе, который регулируется гайками 47.
Работа устройства осуществляется следующим образом.
Мобильное токарное устройство на тележке-домкрате 20 закатывают внутрь обрабатываемой обечайки 12 и закрепляют посредством раздвижных опор 10 и 11.
При этом опоры 10 раздвигают посредством штурвала 17, насаженного на винт 14 (предварительное крепление) с последующей подачей давления воздуха в пневмоцилиндр 13 через штуцер 19 (окончательное крепление). Усилие зажима, достигнутое на опорах 10, фиксируется дожимом ходового винта 14 с последующим его стопорением от разворота рукояткой-фиксатором 18.
Крепление мобильного токарного устройства посредством раздвижных опор 11 осуществляют вращением гаек 47.
При включении приводного электродвигателя 5 траверса 1 с резцом совершает главное движение с частотой вращения nтр. При этом уравнение цепи главного движения имеет вид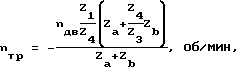
где nдв - частота вращения приводного двигателя, об/мин.
Через систему шестерен, как показано на чертежах, суппорт с резцом получает автоматическую подачу.
При этом уравнение цепи подач в зависимости от положения вытяжной шпонки 37 имеет вид
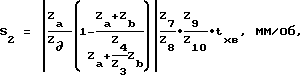
где txв - шаг ходового винта 40 в мм.
Настройка угла обработки осуществляется посредством регулировочных гаек 6 шарнирных звеньев 7 и 8.
Таким образом, предложенное мобильное токарное устройство благодаря наличию жесткой системы базирования и центрирования относительно обрабатываемой поверхности в совокупности с простотой конструкции обеспечивает удобство в эксплуатации и высокое качество обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ КОМПАУНДИРОВАНИЯ НЕФТЕЙ | 1999 |
|
RU2158437C1 |
| ГЛУШИТЕЛЬ ШУМА ПНЕВМОДВИГАТЕЛЯ | 2000 |
|
RU2194607C2 |
| КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИУСНЫХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ЛИСТОВЫХ ЗАГОТОВОК | 2007 |
|
RU2360770C2 |
| СПОСОБ ОПОРОЖНЕНИЯ УЧАСТКА НЕФТЕПРОВОДА | 2012 |
|
RU2518748C1 |
| СПОСОБ ЛИКВИДАЦИИ ВАНТУЗА ТРУБОПРОВОДА | 2012 |
|
RU2522278C1 |
| СПОСОБ И СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВЫХ ПОВЕРХНОСТЕЙ | 2000 |
|
RU2215634C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ КОМПАУНДИРОВАНИЯ НЕФТЕЙ ПО НЕСКОЛЬКИМ ПАРАМЕТРАМ КАЧЕСТВА | 2003 |
|
RU2248031C2 |
| СПОСОБ ВЫРЕЗКИ УЧАСТКА ТРУБОПРОВОДА | 2012 |
|
RU2529972C2 |
| СПОСОБ РАЗМЫВА И УДАЛЕНИЯ ДОННЫХ ОТЛОЖЕНИЙ ИЗ СТАЛЬНЫХ ВЕРТИКАЛЬНЫХ РЕЗЕРВУАРОВ С НЕФТЬЮ ИЛИ НЕФТЕПРОДУКТАМИ | 2012 |
|
RU2527792C2 |
| СПОСОБ РЕМОНТА ТРУБОПРОВОДА | 2012 |
|
RU2516052C1 |
Изобретение относится к области машиностроения, к станкостроению, к станкам токарной группы и предназначено для механической обработки уплотнительных поверхностей преимущественно корпусов клиновых задвижек при их ремонте. Устройство с целью упрощения конструкции, повышения удобства в эксплуатации и точности обработки за счет создания эффективной системы базирования и настройки относительно обрабатываемой поверхности содержит приводной двигатель для обеспечения главного движения и автоматической поперечной подачи резца, ручной привод поперечной подачи резца, резцедержатель с ручным винтовым приводом врезания резца, трубчатый корпус с элементами крепления относительно обрабатываемой поверхности и тележку-домкрат. Привод главного движения выполнен в виде первой и второй последовательно соединенных планетарных ступеней по схеме 2К-Н, смонтированных на общей неподвижной оси, скрепленной с механизмом регулировки угла обработки, причем первая планетарная ступень содержит неподвижное водило, на котором закреплен упомянутый приводной двигатель, на валу которого закреплена солнечная шестерня, а вторая планетарная ступень выполнена в виде дифференциала, центральные шестерни которого с противоположных торцов имеют соосные зубчатые венцы, предназначенные для зацепления с сателлитами первой планетарной ступени. При этом на оси одного из сателлитов второй планетарной ступени закреплен блок шестерен, кинематически связанный с винтовым механизмом суппорта автоматической поперечной подачи резца. На внешней образующей трубчатого корпуса размещены равнорасположенные по окружности радиальные раздвижные опоры, сгруппированные в два ряда по три опоры в каждом. Причем опоры одного из рядов выполнены в виде двухрычажных шарнирных механизмов, одни концы которых соединены с трубчатым корпусом, а другие - со скользящим вдоль него ползуном, который посредством радиальных пальцев, расположенных в продольных пазах трубчатого корпуса, соединен с жестким диском, скрепленным со штоком силового цилиндра, имеющим винт ручного привода поршня, который шарнирно скреплен с поршнем и размещен в резьбе на крышке цилиндра. 3 ил.
Мобильное токарное устройство для обработки торцов крупногабаритных обечаек, отличающееся тем, что оно содержит приводной двигатель для обеспечения главного движения и автоматической поперечной подачи резца, ручной привод поперечной подачи резца, резцедержатель с ручным винтовым приводом врезания резца, трубчатый корпус с элементами крепления относительно обрабатываемой поверхности и тележку-домкрат, привод главного движения выполнен в виде первой и второй последовательно соединенных планетарных ступеней по схеме 2К-Н, смонтированных на общей неподвижной оси, скрепленной с механизмом регулировки угла обработки, причем первая планетарная ступень содержит неподвижное водило, на котором закреплен упомянутый приводной двигатель, на валу которого закреплена солнечная шестерня, а вторая планетарная ступень выполнена в виде дифференциала, центральные шестерни которого с противоположных торцов имеют соосные зубчатые венцы, предназначенные для зацепления с сателлитами первой планетарной ступени, при этом на оси одного из сателлитов второй планетарной ступени закреплен блок шестерен, кинематически связанный с винтовым механизмом суппорта автоматической поперечной подачи резца, на внешней образующей трубчатого корпуса размещены равнорасположенные по окружности радиальные раздвижные опоры, сгруппированные в два ряда по три опоры в каждом, причем опоры одного из рядов выполнены в виде двухрычажных шарнирных механизмов, одни концы которых соединены с трубчатым корпусом, а другие - со скользящим вдоль него ползуном, который посредством радиальных пальцев, расположенных в продольных пазах трубчатого корпуса, соединен с жестким диском, скрепленным со штоком силового цилиндра, имеющим винт ручного привода поршня, который шарнирно скреплен с поршнем и размещен в резьбе на крышке цилиндра.
| Ближайший аналог не обнаружен | |||
| ПЕРЕНОСНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1998 |
|
RU2144449C1 |
| 0 |
|
SU207642A1 | |
| Переносное устройство для обработки торцов обечаек | 1973 |
|
SU480498A1 |
| ТРАНСПОРТНАЯ СИСТЕМА НА ЭЛЕКТРОМАГНИТНОМ ПОДВЕСЕ | 1989 |
|
RU1631887C |
| Насадка для тепломассообменных аппаратов | 1988 |
|
SU1526786A1 |
| US 6050161, 18.04.2000. | |||

