Изобретение относится к области машиностроения и может быть использовано, в частности, для ориентации антенн, а также в робототехнике и других промышленных устройствах,
Известно поворотное устройство, выполненное в виде кривошипно-кулисного механизма, содержащее основание, кривошип и кулисный механизм (см. Механизмы/ Под ред. С.Н.Кожевникова. - 1965, с.111, рис.2.155). При движении кулисы кривошип совершает вращательное движение, однако при этом имеются две мертвые точки, которые ограничивают угол поворота. В реальных конструкциях угол поворота не превышает 120o.
Наиболее близким к предлагаемому изобретению является поворотное устройство, выполненное в виде кривошипно-коромыслового механизма (см. Механизмы/ Под ред. С.Н.Кожевникова. - 1965, с.90, рис.2.68), содержащее четыре звена: основание, установленные на основании два кривошипа с возможностью вращения, один из которых является выходным звеном, коромысло, связанное одним концом с первым кривошипом с возможностью вращения, а вторым концом, связанный со вторым кривошипом с возможностью вращения.
Ведущим звеном, обычно, является кривошип. При определенном соотношении длин звеньев устройство обеспечивает поворот выходного кривошипа на угол более 180o, что необходимо во многих устройствах, например для наведения антенн. Однако в этом устройстве, крутящий момент на ведущий кривошип от приводного устройства прикладывается к оси вращения кривошипа, а противоположный конец ведущего кривошипа передает усилие на коромысло, поэтому ведущий кривошип нагружен изгибающим усилием. Для обеспечения высокой несущей способности и жесткости необходимо увеличивать размеры ведущего кривошипа в плоскости действия крутящего момента, что приводит, помимо увеличения габаритов, к увеличению массы. Кроме того, обычно длина кривошипа значительно превышает размер приводного устройства, поэтому погрешности поворота приводного устройства на выходном кривошипе увеличиваются на величину отношения длины ведущего кривошипа к радиусу выходного элемента приводного устройства, что обуславливает низкую точность поворота выходного кривошипа. Указанные недостатки можно устранить увеличением диаметров оси вращения ведущего кривошипа и выходного элемента приводного устройства, но это приводит к увеличению габаритов, массы и удорожанию конструкции.
Помимо указанных недостатков, устройство обеспечивает вращение выходного звена только по одной координате, что является недостаточным во многих случаях, например для наведения антенн.
Технической задачей, решаемой предлагаемым в семи вариантах изобретением, является получение высокой нагрузочной способности и жесткости поворотного устройства без увеличения массы и габаритов, а также обеспечение высокой точности поворота выходного кривошипа путем устранения изгибающих усилий в ведущем кривошипе и обеспечение во всех звеньях поворотного устройства, в том числе и ведущего кривошипа усилий растяжения-сжатия.
Задачей, решаемой вторым, пятым, шестым, и седьмым вариантами, помимо указанных выше, является получение возможности независимого поворота выходного звена по двум координатам.
По первому, второму и третьему вариантам, это достигается тем, что поворотное устройство, как и в прототипе, содержит четыре звена: основание, установленные на основании два кривошипа с возможностью вращения, один из которых является выходным звеном, коромысло, связанное одним концом с первым кривошипом с возможностью вращения, а вторым концом, связанный со вторым кривошипом с возможностью вращения.
По первому варианту новым является то, что устройство снабжено кулисным механизмом, одно из звеньев которого связано с одним из звеньев поворотного устройства с возможностью вращения, а другое звено кулисного механизма связано с другим звеном поворотного устройства с возможностью вращения.
По второму варианту новым является то, что устройство снабжено кулисным механизмом, одно из звеньев которого связано с одним из звеньев поворотного устройства с возможностью вращения, а другое звено кулисного механизма связано с другим звеном поворотного устройства с возможностью вращения, кроме того, на одном из кривошипов жестко закреплено поворотное основание, на котором установлены третий и четвертый кривошипы с возможностью вращения, а также устройство снабжено вторым коромыслом, связанным одним концом с третьим кривошипом с возможностью вращения, а вторым концом с четвертым кривошипом с возможностью вращения, и вторым кулисным механизмом, одно из звеньев которого связано с одним из звеньев поворотного устройства, с возможностью вращения, а другое звено второго кулисного механизма связано с другим звеном поворотного устройства с возможностью вращения, при этом третий или четвертый кривошип является выходным звеном.
По третьему варианту новым является то, что устройство снабжено тягой, соединенной одним концом с основанием с возможностью вращения, а другим концом с коромыслом с возможностью вращения, при этом кривошипы выполнены в виде кулисных механизмов, один из которых одним звеном соединен с основанием с возможностью вращения, а другим звеном соединен с тягой с возможностью вращения, а другой кулисный механизм одним звеном соединен с коромыслом с возможностью вращения, а другим звеном соединен с тягой с возможностью вращения.
По четвертому и шестому вариантам решение задачи достигается тем, что поворотное устройство, также содержит четыре звена: основание, два кривошипа и коромысло, которое является выходным звеном.
По четвертому варианту новым является то, что устройство снабжено тягой, соединенной одним концом с основанием с возможностью вращения, а другим концом с коромыслом с возможностью вращения, при этом кривошипы выполнены в виде кулисных механизмов, один из которых одним звеном соединен с основанием с возможностью вращения, а другим звеном соединен с тягой с возможностью вращения, а другой кулисный механизм одним звеном соединен с коромыслом с возможностью вращения, а другим звеном соединен с тягой с возможностью вращения. Кулисные механизмы могут быть кинематически связаны между собой.
По шестому варианту новым является то, что устройство снабжено тягой, соединенной одним концом с основанием с возможностью вращения в двух плоскостях, а другим концом с выходным звеном с возможностью вращения в двух плоскостях, при этом кривошипы выполнены в виде кулисных механизмов, один из которых одним звеном соединен с основанием с возможностью вращения в двух или более плоскостях, а другим звеном соединен с тягой с возможностью вращения, а другой кулисный механизм одним звеном соединен с выходным звеном с возможностью вращения в двух или более плоскостях, а другим звеном соединен с тягой с возможностью вращения, при этом выходное звено выполнено в виде платформы, кроме того, устройство снабжено третьим и четвертым кулисными механизмами, каждый из которых одним звеном соединен с одним из звеньев поворотного устройства с возможностью вращения в двух или более плоскостях, а другим звеном соединен с другим звеном поворотного устройства с возможностью вращения в двух или более плоскостях. Первый и второй, а также третий и четвертый кулисные механизмы могут быть попарно кинематически связаны между собой.
По пятому и седьмому вариантам решение задачи достигается тем, что поворотное устройство содержит четыре звена: основание, установленные на основании два кривошипа и выходное звено, связанное одним концом с первым кривошипом, а вторым концом, связанное со вторым кривошипом.
По пятому варианту новым является то, что устройство снабжено тягой, соединенной своими концами с двумя звеньями поворотного устройства с возможностью вращения в двух плоскостях, а кривошипы выполнены в виде кулисных механизмов, каждый из которых одним звеном соединен с основанием с возможностью вращения в двух или более плоскостях, а другим звеном соединен с коромыслом с возможностью вращения в двух или более плоскостях, при этом выходное звено выполнено в виде платформы, кроме того, устройство снабжено третьим и четвертым кулисными механизмами, каждый из которых одним звеном соединен с одним из звеньев поворотного устройства с возможностью вращения в двух или более плоскостях, а другим звеном соединен с другим звеном поворотного устройства с возможностью вращения в двух или более плоскостях.
По седьмому варианту новым является то, что устройство снабжено двумя тягами, каждая из которых соединенная одним концом с основанием, а другим концом с выходным звеном, при этом одна из тяг в местах соединения с основанием и выходным звеном имеет возможность вращения в двух плоскостях, а другая тяга имеет возможность вращения в местах соединения с основанием и выходным звеном в двух или более плоскостях, при этом кривошипы выполнены в виде кулисных механизмов, каждый из которых одним звеном соединен с основанием с возможностью вращения в двух или более плоскостях, а другим звеном соединен с выходным звеном с возможностью вращения в двух или более плоскостях, при этом выходное звено выполнено в виде платформы, кроме того, устройство снабжено третьим кулисным механизмом, одно звено которого соединено с одним из звеньев поворотного устройства с возможностью вращения в двух или более плоскостях, а другим звеном соединено с другим звеном поворотного устройства с возможностью вращения в двух или более плоскостях.
Кулисный механизм может быть выполнен в виде механизма винт - гайка или гидроцилиндра, а также любого устройства, обеспечивающего поступательное движение (пневмоцилиндр, реечная передача и т.д.).
Предлагаемые варианты изобретения иллюстрируются чертежами, на которых показано:
на фиг.1 - кинематическая схема первого варианта поворотного устройства;
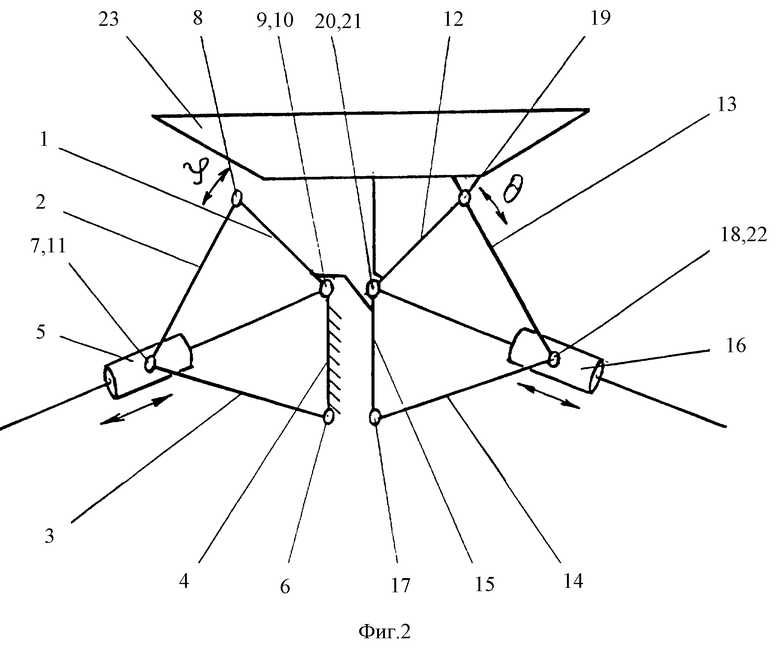
на фиг.2 - кинематическая схема второго варианта поворотного устройства;
на фиг. 3 - кинематическая схема третьего варианта поворотного устройства;
на фиг. 4 - кинематическая схема четвертого варианта поворотного устройства;
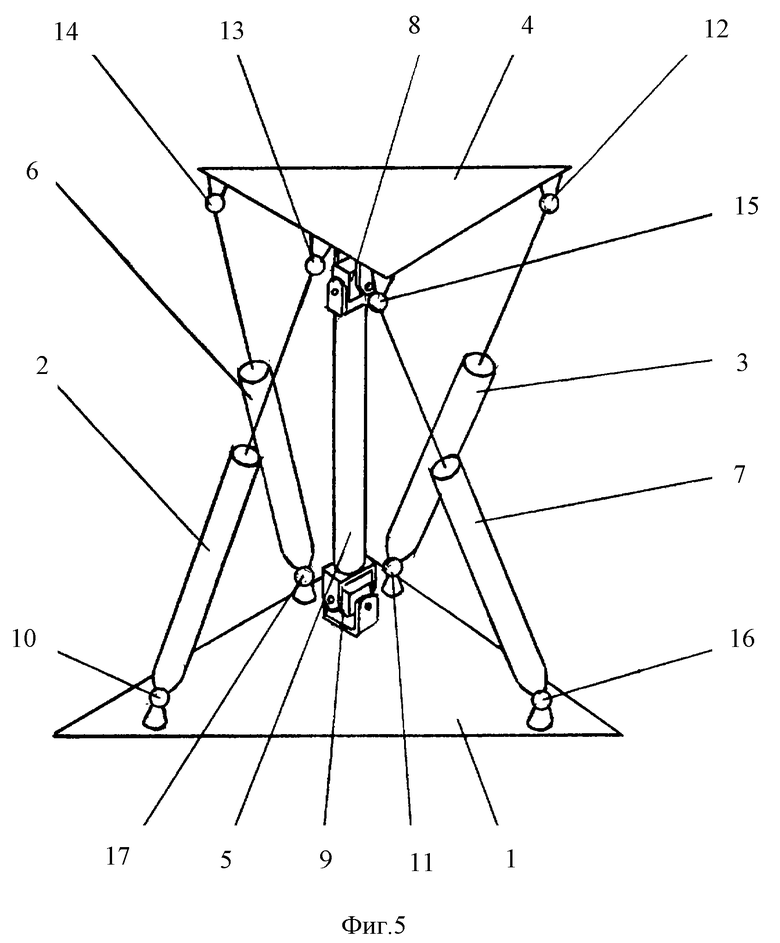
на фиг.5 - кинематическая пятого варианта поворотного устройства;
на фиг.6 - кинематическая схема шестого варианта поворотного устройства;
на фиг. 7 - кинематическая схема седьмого варианта поворотного устройства;
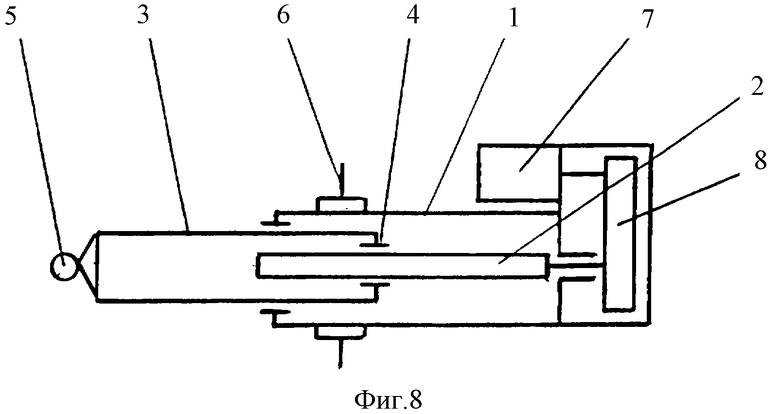
на фиг.8 - кинематическая схема кулисного механизма, выполненного в виде механизма винт - гайка;
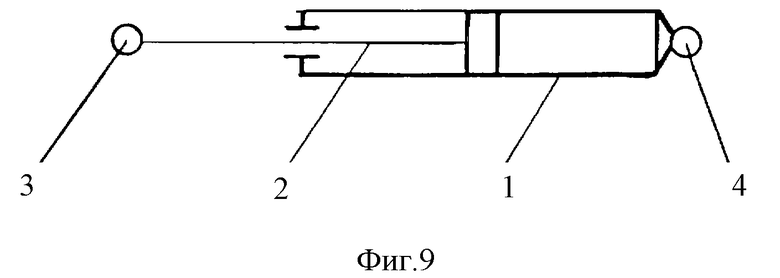
на фиг.9 - кинематическая схема кулисного механизма, выполненного в виде гидроцилиндра.
По первому варианту поворотное устройство состоит (фиг.1) из выходного кривошипа 1, коромысла 2, кривошипа 3, основания 4, кулисного механизма 5, одностепенных кинематических пар 6, 7, 8, 9, 10, 11. Кинематические пары 10 и 11, соединяющие звенья кулисного механизма 5 со звеньями поворотного устройства, выполнены соосно с кинематическими парами соответственно 9 и 7. На кривошипе 1 жестко закреплена полезная нагрузка, например антенна 12.
По второму варианту поворотное устройство состоит (фиг.2) из первого выходного кривошипа 1, коромысла 2, кривошипа 3, основания 4. кулисного механизма 5, одностепенных кинематических пар 6, 7, 8, 9, 10, 11. Кинематические пары 10 и 11, соединяющие звенья кулисного механизма 5 со звеньями поворотного устройства, выполнены соосно с кинематическими парами соответственно 9 и 7. На выходном звене 1 установлены кривошип 12, коромысло 13, кривошип 14, основания 15, кулисный механизм 16, одностепенные кинематические пары 17, 18, 19, 20, 21, 22. При этом кривошип 12 является вторым выходным звеном. Кинематические пары 21 и 22, соединяющие звенья кулисного механизма 16 со звеньями поворотного устройства, выполнены соосно с кинематическими парами соответственно 21 и 18. На кривошипе 12 жестко закреплена полезная нагрузка, например антенна 23.
По третьему варианту поворотное устройство состоит (фиг.3) из основания 1, кулисных механизмов 2 и 3, коромысла 4, тяги 5, одностепенных кинематических пар 6, 7, 8, 9, 10, 11. Коромысло 4 является выходным звеном. Кулисные механизмы 2 и 3 соединены кинематическими парами 6, 7, 8, 9 с коромыслом 4 и основанием 1. Тяга 5 соединена со звеньями устройства, в данном случае с основанием 1 и коромыслом 4, кинематичекими парами 10 и 11.
По четвертому варианту поворотное устройство состоит (фиг.4) из основания 1, кулисных механизмов 2 и 3, коромысла 4, тяги 5, одностепенных кинематических пар 6, 7, 8, 9, 10, 11. Коромысло 4 является выходным звеном. Кулисный механизм 2 соединен кинематической парой 7 с основанием 1 и кинематической парой 8 с тягой 5. Кулисный механизм 3 соединен кинематической парой 9 с коромыслом 4 и кинематической парой 6 с тягой 5. Тяга 5 соединена с основанием 1 и коромыслом 4, кинематичекими парами 10 и 11. Кулисные механизмы могут быть связаны между собой кинематической связью 12.
По пятому варианту поворотное устройство состоит (фиг.5) из основания 1, кулисных механизмов 2, 3, 6, 7, выходной платформы 4, тяги 5, двухстепенных кинематических пар 8 и 9, в данном случае шарниров Гука, кинематических пар 10, 11, 12, 13, 14, 15, 16, 17, в данном случае трехстепенных выполненных в виде сферических шарниров. Тяга 5 соединена кинематическими парами 8 и 9 с двумя звеньями поворотного устройства, в данном случае, соответственно с основанием 1 и платформой 4. Каждый из кулисных механизмов 2 и 3 соединен одним звеном с основанием кинематическими парами 10 и 11, а другим звеном с платформой с помощью кинематических пар 12 и 13. Каждый из кулисных механизмов 6 и 7 соединен одним звеном с одним из звеньев поворотного устройства, в данном случае основанием 1 кинематическими парами 16 и 17, а другим звеном с другим звеном поворотного устройства, в данном случае с платформой 4 с помощью кинематических пар 14 и 15.
По шестому варианту поворотное устройство состоит (фиг.6) из основания 1, кулисных механизмов 2, 3, 6, 7, выходной платформы 4, тяги 5, двухстепенных кинематических пар 8 и 9, в данном случае шарниров Гука, кинематических пар 10, 11, 12, 13, 14, 15, 16, 17, в данном случае трехстепенных, выполненных в виде сферических шарниров. Тяга 5 соединена кинематическими парами 8 и 9 соответственно с основанием 1 и платформой 4. Кулисный механизм 2 соединен одним звеном с основанием кинематической парой 10, а другим звеном с тягой 5 кинематической парой 13. Кулисный механизм 3 соединен одним звеном с платформой 4 кинематической парой 12, а другим звеном с тягой 5 кинематической парой 11. Кулисный механизм 7 соединен одним звеном с одним из звеньев поворотного устройства, в данном случае с основанием 1 кинематической парой 16, а другим звеном с другим звеном поворотного устройства, в данном случае тягой 5 кинематической парой 15. Кулисный механизм 6 соединен одним звеном с одним из звеньев поворотного устройства, в данном случае с платформой 4, кинематической парой 14, а другим звеном с другим звеном поворотного устройства, в данном случае тягой 5 кинематической парой 17. Кулисные механизмы 2 и 3 могут быть связаны между собой кинематической связью 18. Кулисные механизмы 6 и 7 могут быть связаны между собой кинематической связью 19.
По седьмому варианту поворотное устройство состоит (фиг.7) из основания 1, кулисных механизмов 2, 3, 7, выходной платформы 4, тяг 5 и 6, двухстепенных кинематических пар 8 и 9, в данном случае шарниров Гука, кинематических пар 10, 11, 12, 13, 14, 15, 16, 17, в данном случае трехстепенных, выполненных в виде сферических шарниров. Тяга 5 соединена кинематическими парами 8 и 9 одним концом с основанием 1, а другим концом с платформой 4. Тяга 6 соединена кинематическими парами 14 и 17 одним концом с основанием 1, а другим концом с платформой 4. Каждый из кулисных механизмов 2 и 3 соединен одним звеном кинематическими парами соответственно 10 и 11 с основанием, а другим звеном кинематическими парами соответственно 13 и 12 с платформой 4. Кулисный механизм 7 соединен кинематической парой 16 с одним из звеньев поворотного устройства, в данном случае основанием 1, а другим звеном соединен кинематической парой 15 с другим звеном поворотного устройства, в данном случае платформой 4. Кулисные механизмы 2 и 3 могут быть связаны между собой кинематической связью 18.
Кулисный механизм, выполненный в виде механизма винт - гайка, состоит (фиг.8) из корпуса 1, ходового винта 2, штока 3, жестко связанного с ходовой гайкой 4, подшипника 5, установленного на штоке, оси вращения 6, жестко связанной с корпусом, двигателя 7, редуктора 8. Подшипник 5 входит в кинематическую пару 10 поворотного устройства по первому варианту (фиг.1), в кинематические пары 10 и 20 поворотного устройства по второму варианту (фиг.2), в кинематические пары 8 и 9 поворотных устройств по третьему и четвертому вариантам (фиг.3 и 4), в кинематические пары 12, 13, 14 и 15 поворотных устройств по пятому и шестому вариантам (фиг.5 и 6), в кинематические пары 12, 13, и 15 поворотных устройств по седьмому варианту (фиг.7). Ось вращения 6 входит в кинематическую пару 11 поворотного устройства по первому варианту (фиг.1), в кинематические пары 11 и 21 поворотного устройства по второму варианту (фиг.2), в кинематические пары 6 и 7 поворотных устройств по третьему и четвертому вариантам (фиг.3 и 4), в кинематические пары 10, 11, 16 и 17 поворотных устройств по пятому и шестому вариантам (фиг.5 и 6), в кинематические пары 10, 11, и 16 поворотных устройств по седьмому варианту (фиг. 7).
Кулисный механизм, выполненный в виде гидроцилиндра, состоит (фиг.9) из цилиндра 1, штока с поршнем 2, подшипников 3 и 4. Подшипник 3 входит в кинематическую пару 10 поворотного устройства по первому варианту (фиг.1), в кинематические пары 10 и 20 поворотного устройства по второму варианту (фиг. 2), в кинематические пары 8 и 9 поворотных устройств по третьему и четвертому вариантам (фиг.3 и 4), в кинематические пары 12, 13, 14 и 15 поворотных устройств по пятому и шестому вариантам (фиг.5 и 6), в кинематические пары 12, 13, и 15 поворотных устройств по седьмому варианту (фиг.7). Подшипник 4 входит в кинематическую пару 11 поворотного устройства по первому варианту (фиг. 1), в кинематические пары 11 и 21 поворотного устройства по второму варианту (фиг. 2), в кинематические пары 6 и 7 поворотных устройств по третьему и четвертому вариантам (фиг.3 и 4), в кинематические пары 10, 11, 16 и 17 поворотных устройств по пятому и шестому вариантам (фиг.5 и 6), в кинематические пары 10, 11, и 16 поворотных устройств по седьмому варианту (фиг.7).
Поворотное устройство по первому варианту работает следующим образом.
При поступательном движении кулисного механизма 5, кривошип 3 поворачивается вокруг оси кинематической пары 6 и приводит в движение коромысло 2 через кинематическую пару 5. В свою очередь коромысло 2 через кинематическую пару 8 вращает выходной кривошип 1 вокруг оси кинематической пары 9 относительно основания 4. Текущий угол поворота выходного кривошипа 1 (угол ϕ) определяется по формуле:
где a - длина кривошипа 1,
b - длина коромысла 2,
х - текущее значение расстояния между кинематическими парами 10 и 11,
с - расстояние между кинематическими парами 6 и 9,
d - длина кривошипа 3.
Максимально возможный угол поворота ϕ превышает 180o и может достигать 240o. Крайние положения антенны 12, соответствующие максимальному углу поворота ϕ =180o показаны штрихпунктирными линиями. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, состоящую из двух треугольников, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного кривошипа 1 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного кривошипа 1 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления.
Поворотное устройство по второму варианту работает следующим образом.
При поступательном движении кулисного механизма 5, кривошип 3 поворачивается вокруг оси кинематической пары 6 и приводит в движение коромысло 2 через кинематическую пару 5. В свою очередь коромысло 2 через кинематическую пару 8 вращает выходной кривошип 1 вокруг оси кинематической пары 9 относительно основания 4. Текущий угол поворота выходного кривошипа 1 (угол ϕ) также определяется по формуле 1.
При поступательном движении кулисного механизма 16, кривошип 14 поворачивается вокруг оси кинематической пары 17 и приводит в движение коромысло 13 через кинематическую пару 16. В свою очередь коромысло 13 через кинематическую пару 19 вращает выходной кривошип 12 вокруг оси кинематической пары 20 относительно основания 15. Текущий угол поворота выходного кривошипа 12 (угол θ) определяется по формуле:
где e - длина кривошипа 12,
f - длина коромысла 13,
y - текущее значение расстояния между кинематическими парами 21 и 22,
g - расстояние между кинематическими парами 17 и 20,
h - длина кривошипа 14.
Таким образом, выходной кривошип 12, на который устанавливается полезная нагрузка, например антенна, получает вращение по двум координатам, тем самым обеспечивается наведение в любую точку пространства. Максимально возможные углы поворота по обеим координатам ϕ и θ превышают 180o и могут достигать 240o. При этом звенья поворотного устройства всегда образуют две жесткие геометрические фигуры, каждая состоящая из двух треугольников, изменение углового положения любого звена в которых невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходных кривошипов 1 и 12 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисных механизмах на точность поворота выходных кривошипов 1 и 12 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления.
Поворотное устройство по третьему варианту работает следующим образом. При одновременных поступательных движениях кулисных механизмов 2 и 3, изменяются их длины и соответственно меняются угловые положения всех звеньев, кроме основания, которое является неподвижным. Тяга 5 вращается вокруг кинематической пары 11, кулисные механизмы 2 и 3 вращаются вокруг соответственно кинематических пар 6 и 7 и через кинематические пары 8 и 9 вращают коромысло 4 вокруг кинематической пары 10 и одновременно перемещают его плоскопараллельно. Поступательные движения кулисных механизмов 2 и 3 осуществляются одновременно и согласованно между собой математическими зависимостями, определяемыми геометрическими параметрами звеньев устройства, поскольку несогласованность и, тем более, неодновременность движения невозможны без деформации звеньев. Максимально возможный угол поворота выходного звена (коромысла) 4 превышает 180o и может достигать 240o. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного звена 4 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного звена 4 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления. Обеспечить полностью согласованное движение кулисных механизмов 2 и 3 невозможно из-за погрешностей, это приводит к некоторому взаимному нагружению кулисных механизмов 2 и 3 и всего поворотного устройства в целом, при этом обеспечивается выборка мертвых ходов в сочленениях поворотного устройства. Это позволяет снизить точность изготовления и не применять специальные люфтовыбирающие устройства.
Поворотное устройство по четвертому варианту работает следующим образом. При поступательных движениях кулисных механизмов 2 и 3, изменяются их длины и соответственно меняются угловые положения всех звеньев, кроме основания, которое является неподвижным. Тяга 5 вращается вокруг кинематической пары 11, кулисные механизмы 2 и 3 вращаются вокруг соответственно кинематических пар 6 и 7 и через кинематические пары 8 и 9 вращают коромысло 4 вокруг кинематической пары 10 и одновременно перемещают его плоскопараллельно. Поступательные движения кулисных механизмов 2 и 3 могут осуществляться как одновременно, так и раздельно. Максимально возможный угол поворота выходного звена (коромысла) 4 превышает 180o и может достигать 240o. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, состоящую из двух треугольников, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного звена 4 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного звена 4 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления. Кулисные механизмы 2 и 3 могут быть связаны между собой кинематически цепной, ременной, коническими или другими передачами, это позволяет приводить в движение оба кулисных механизма от одного двигателя, что значительно удешевляет как поворотное устройство, так и его систему управления.
Поворотное устройство по пятому варианту работает следующим образом. При поступательных движениях кулисных механизмов 2, 3, 6 и 7, изменяются их длины и соответственно меняются угловые положения всех звеньев, кроме основания, которое является неподвижным. Тяга 5 вращается вокруг кинематической пары 9 в двух плоскостях, кулисные механизмы 2, 3, 6 и 7 вращаются вокруг соответственно кинематических пар 10, 11, 17 и 16 и через кинематические пары 13, 12, 14 и 15 вращают платформу 4 вокруг кинематической пары 8 и одновременно перемещают его в пространстве. Поступательные движения кулисных механизмов 2 и 3 и 6 и 7 попарно осуществляются одновременно и согласованно между собой математическими зависимостями, определяемыми геометрическими параметрами звеньев устройства, поскольку несогласованность и, тем более, неодновременность движения невозможны без деформации звеньев. Максимально возможные углы поворота выходного звена (коромысла) 4 превышают 180o и могут достигать 240o. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного звена 4 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного звена 4 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления. Обеспечить полностью согласованное движение кулисных механизмов 2 и 3, а также 6 и 7 невозможно из-за погрешностей, это приводит к некоторому взаимному нагружению кулисных механизмов 2 и 3, а также 6 и 7 и всего поворотного устройства в целом, при этом обеспечивается выборка мертвых ходов в сочленениях поворотного устройства. Это позволяет снизить точность изготовления и не применять специальные люфтовыбирающие устройства.
Поворотное устройство по шестому варианту работает следующим образом. При поступательных движениях кулисных механизмов 2, 3, 6 и 7, изменяются их длины и соответственно меняются угловые положения всех звеньев, кроме основания, которое является неподвижным. Тяга 5 вращается вокруг кинематической пары 9 в двух плоскостях, кулисные механизмы 2, 3, 6 и 7 вращаются вокруг соответственно кинематических пар 10, 11, 17 и 16 и через кинематические пары 13, 12, 14 и 15 вращают платформу 4 вокруг кинематической пары 8 и одновременно перемещают его в пространстве. Поступательные движения кулисных механизмов 2, 3, 6 и 7 могут осуществляться как одновременно, так и раздельно. Максимально возможные углы поворота выходного звена (коромысла) 4 превышают 180o и могут достигать 240o. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, состоящую из треугольников, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного звена 4 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного звена 4 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления. Попарно кулисные механизмы 2 и 3, а также 6 и 7 могут быть связаны между собой кинематически цепной, ременной, коническими или другими передачами, это позволяет приводить в движение попарно кулисные механизмы от одного двигателя, что значительно удешевляет как поворотное устройство, так и его систему управления.
Поворотное устройство по седьмому варианту работает следующим образом. При поступательных движениях кулисных механизмов 2, 3 и 7, изменяются их длины и соответственно меняются угловые положения всех звеньев, кроме основания, которое является неподвижным. Тяги 5 и 6 вращаются вокруг соответственно кинематических пар 9 и 17 в двух плоскостях, кулисные механизмы 2, 3 и 7 вращаются вокруг соответственно кинематических пар 10, 11 и 16 и через кинематические пары 13, 12 и 15 перемещают платформу 4 в пространстве относительно кинематических пар 8 и 14. Вращение платформы в двух плоскостях происходит относительно мгновенных центров вращения, положение которых в пространстве определяется геометрическими параметрами поворотного устройства и заданными законами движения кулисных механизмов 2, 3 и 7. Поступательные движения кулисных механизмов 2, 3 и 7 могут осуществляться как одновременно, так и раздельно. Максимально возможные углы поворота выходного звена (коромысла) 4 превышают 180o и могут достигать 240o. При этом звенья поворотного устройства всегда образуют жесткую геометрическую фигуру, изменение углового положения любого звена в которой невозможно без изменения длин звеньев. Это означает, что звенья поворотного устройства при нагружении выходного звена 4 работают только на растяжение-сжатие, при этом обеспечивается минимальная масса при заданной жесткости и нагрузочной способности. Влияние погрешностей линейных размеров и зазоров в кинематических парах и в кулисном механизме на точность поворота выходного звена 4 зависит от геометрических параметров системы. Требуемая точность может быть достигнута соответствующим выбором этих параметров, при этом не требуется увеличения точности изготовления деталей устройства, а значит увеличения стоимости изготовления. Кулисные механизмы 2 и 3 могут быть связаны между собой кинематически цепной, ременной, коническими или другими передачами, это позволяет приводить в движение кулисные механизмы от одного двигателя, что значительно удешевляет как поворотное устройство, так и его систему управления.
Механизм винт - гайка работает следующим образом.
Двигатель 7 приводит во вращение редуктор 8, который, в свою очередь, вращает ходовой винт 2, ходовая гайка 4, не имеющая возможности вращения за счет подшипника 5, получает поступательное движение. При этом расстояние между осями подшипника 5 и оси 6 изменяется и приводится в движение поворотное устройство.
Гидроцилиндр работает следующим образом.
Рабочая жидкость подается в левую или правую полости цилиндра 1, при этом поршень вместе со штоком 2 получает поступательное движение. При этом расстояние между осями подшипников 3 и 4 изменяется и приводится в движение поворотное устройство.
Усилие от механизмов винт - гайка и гидроцилиндров создает крутящий момент на выходных кривошипах, при этом в предлагаемых поворотных устройствах жесткостные и точностные характеристики соответствуют характеристикам шестеренчатых приводов с диаметром выходных зубчатых колес, соизмеримым с длиной выходных кривошипов предлагаемых вариантов поворотного устройства. При этом нагрузочная способность шестеренчатых приводов меньше, а масса значительно больше, чем в предлагаемых вариантах поворотного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРЕЗЕРНЫЙ СТАНОК | 1994 |
|
RU2082602C1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| Рычажный вариатор | 1982 |
|
SU1040251A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2002 |
|
RU2202016C1 |
| Швейная машина зигзаг | 1981 |
|
SU1089187A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХТАКТНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2429364C1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (ВАРИАНТЫ) | 2004 |
|
RU2284384C2 |




Изобретение относится к области машиностроения и может быть использовано, в частности, для ориентации антенн, а также в робототехнике и других промышленных устройствах. По первому варианту поворотное устройство выполнено в виде кривошипно-коромыслового механизма и снабжено кулисным механизмом, связанным своими звеньями со звеньями кривошипно-коромыслового механизма. По второму варианту поворотное устройство снабжено кулисным механизмом, а также на одном из звеньев жестко закреплено поворотное основание с еще одним кривошипно-коромысловым механизмом и еще одним кулисным механизмом. По третьему и четвертому вариантам поворотное устройство снабжено тягой, а кривошипы соединены с кулисными механизмами, при этом по третьему варианту каждый кулисный механизм соединен с основанием и коромыслом, а по четвертому варианту один кулисный механизм соединен с основанием и тягой, а другой - с коромыслом и тягой. По пятому и шестому вариантам поворотное устройство снабжено тягой с основанием и выходным звеном в виде платформы с возможностью вращения в двух плоскостях, а кривошипы соединены с кулисными механизмами. Кроме того, поворотное устройство дополнительно снабжено двумя кулисными механизмами. По пятому варианту первые два кулисных механизма соединены с платформой и основанием, а каждый из двух других соединен с любыми двумя звеньями поворотного устройства. По шестому варианту один кулисный механизм соединен с основанием и тягой, другой - с коромыслом и тягой, а третий и четвертый каждый соединен с любыми двумя звеньями поворотного устройства. По седьмому варианту поворотное устройство снабжено двумя тягами, соединенными с основанием и выходным звеном в виде платформы, в одном случае с возможностью вращения в двух плоскостях, в другом случае с возможностью вращения в двух или более плоскостях, а кривошипы соединены с кулисными механизмами. Кроме того, устройство дополнительно снабжено третьим кулисным механизмом. Техническим результатом изобретения является получение высокой нагрузочной способности и жесткости поворотного устройства, а также получение возможности независимого поворота выходного звена по двум координатам. 7 с. и 4 з.п. ф-лы, 9 ил.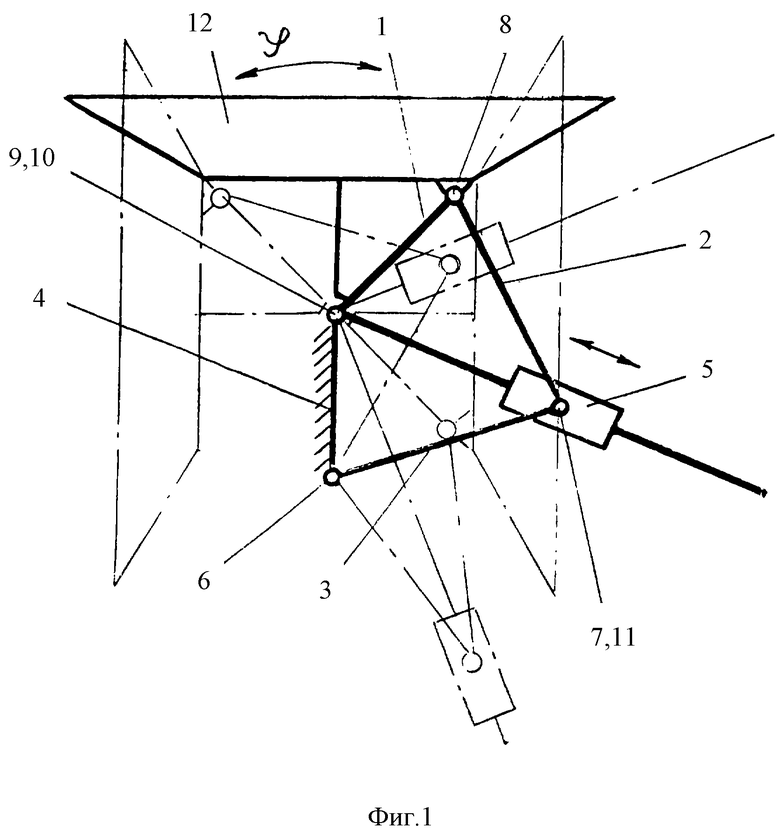
| Механизмы/Под ред | |||
| С.Н.Кожевникова | |||
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 0 |
|
SU359720A1 |
| Опора для установки остронаправленных антенн | 1966 |
|
SU447784A1 |
| Опора для установки остронаправленных антенн | 1970 |
|
SU459824A2 |
| Складное антенно-мачтовое устройство | 1975 |
|
SU552658A1 |
| Опорно-поворотное устройство антенны с ограниченным углом поворота | 1980 |
|
SU943931A1 |
| Опорно-поворотное устройство | 1984 |
|
SU1244738A1 |
| Опора для подвески облучателя зеркальной антенны | 1986 |
|
SU1408479A1 |
| Устройство для крепления вспомогательного отражателя зеркальной антенны | 1987 |
|
SU1506496A1 |
| US 3229941, 18.01.1966 | |||
| US 4379297, 05.04.1983. | |||

