Изобретение относится к многозвенным комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов, устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую и освобождение изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата (охвата) изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С. 9 и 10, рис. а - прототип).
Основным недостатком данного устройства являются усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток предопределен наличием отдельных двигателей для механизмов захвата и поворота, а также использованием тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности. Кроме того, у такого устройства ограничены возможности технологического манипулирования, поскольку захват обеспечивает перемещение объекта манипулирования лишь по простейшей траектории - дуге окружности. Этим исключается возможность использования устройства для перемещения объектов по более сложным траекториям.
Задачей настоящего изобретения является расширение технологических возможностей и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, выполненном в виде комбинированного механизма, содержащего подвижное основание, несущее исполнительный механизм с губками для захвата изделий, механизм поворота и привод, подвижное основание жестко соединено с выходным звеном механизма поворота, ведущие звенья исполнительного механизма смонтированы на основании с возможностью вращения, а выходные звенья - с возможностью сложного движения, при этом ведущие звенья исполнительного механизма кинематически связаны с ведущим звеном механизма поворота.
Исполнительный механизм выполнен в виде совокупности двух многозвенных кулачково-рычажных механизмов, каждый из которых содержит ведущий кулачок, коромысло и выходное звено, при этом коромысло шарнирно связано с основанием и выходным звеном, последнее сопряжено с основанием с возможностью поворотного и поступательного движения.
Кинематическая связь ведущих звеньев содержит шкивы и гибкие элементы, при этом шкивы смонтированы на валу ведущего и оси ведомого звеньев механизма поворота и непосредственно на оси вращения ведущих кулачков.
Губки для захвата изделий закреплены на концах выходных звеньев исполнительного механизма.
При этом свободный конец каждого выходного звена исполнительного механизма выполнен в виде вилки для взаимодействия с пальцем, укрепленным на подвижном основании.
Кроме того, ведущие кулачки жестко соединены между собой и со шкивом, при этом соединение смонтировано на общей оси с возможностью вращения.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающей отбор мощности на механизмы поворота основания и захвата изделий от одного электромеханического привода. Предложенная связь конструктивных элементов и взаимное расположение элементов в сочетании обеспечивают возможность быстродействия устройства и соответствующего повышения его производительности.
Жесткое соединение основания, несущего исполнительный механизм, с выходным звеном (т.е. с качающейся кулисой) механизма поворота дает возможность при необходимости увеличивать угол качания основания до 160-170o. Это расширяет диапазон использования устройства на операциях передачи, отличающихся одна от другой расстояниями между позициями выдачи и приема изделий. Кинематическая связь ведущих звеньев исполнительного механизма и механизма поворота с отбором мощности от одного электромеханического привода обеспечивает необходимую синхронность движения выходных звеньев обоих механизмов.
Выполнение исполнительного механизма в виде совокупность двух многозвенных кулачково-рычажных механизмов обеспечивает сложное движение их выходных звеньев, несущих губки для захвата изделий. Губки совершают возвратно-поворотное движение вместе с подвижным основанием, а также возвратно-поворотное и возвратно-поступательное движение с выстоями относительно основания. Такой характер движения выходных звеньев с губками расширяет технологические возможности устройства. Исполнительный механизм в предлагаемом исполнении может эффективно выполнять операции захвата, переноса и освобождения объекта манипулирования.
Гибкая связь между механизмом поворота и исполнительным механизмом с губками для захвата изделий обеспечивает синхронность движения их ведущих и ведомых звеньев и упрощает отбор мощности от одного привода.
Выполнение концевой части каждого выходного звена в виде вилки для взаимодействия с пальцем подвижного основания имеет свои преимущества: упрощение конструкции, поскольку оба звена сопрягаются с основанием посредством одного пальца; уменьшение потерь на трение, так как исключены низшие поступательные пары трения (ползуны).
Жесткое соединение ведущих кулачков между собой и со шкивом упрощает установку кулачков с учетом фазовых углов и надежно обеспечивает синхронность их движения.
На чертеже представлено устройство типа "рука" для передачи изделий, кинематическая схема.
Устройство содержит подвижное основание 1, несущее исполнительный механизм 2 с губками 3 для захвата изделий, механизм 4, который обеспечивает возвратно-поворотное движение основания 1, и привод 5.
Механизм 4 включает подвижно связанные кривошип 6, выходное звено (кулису) 7 и стойку 8, при этом с выходным звеном жестко соединено подвижное основание 1, шарнирно связанное с осью 9 качания выходного звена. Длины звеньев механизма 4 соответствуют выражению
(λ = r/d = sin(γ/2))<1,
где λ - характерный параметр механизма: относительная длина кривошипа;
r - длина ведущего звена, т.е. длина кривошипа;
d - межцентровое расстояние: расстояние между центрами вращения кривошипа и качания кулисы.
γ - полный угол размаха выходного звена, т.е. кулисы.
Исполнительный механизм 2 выполнен в виде совокупности двух кулачково-рычажных механизмов, состоящей из ведущих кулачков 10 и 11 соответственно коромысел 12 и 13 и выходных звеньев 14 и 15, при этом на концах последних закреплены губки 3 для захвата изделий. Кулачки и коромысла смонтированы соответственно на осях 16 и 17, жестко закрепленных на основании 1. Каждое коромысло шарнирно связано с соответствующим выходным звеном 14 или 15, свободные концы выходных звеньев выполнены в виде вилок для сопряжения с пальцем 18, закрепленным на подвижном основании.
Кинематическая связь кривошипа 6 механизма 4 и кулачков 10 и 11 исполнительного механизма 2 содержит шкивы 19, 20 и 21, смонтированные соответственно на валу кривошипа 6, на оси 9 качания выходного звена 7 и на оси 16 вращения кулачков, и гибкие элементы 22 и 23 для передачи вращения по схеме: вал кривошипа - шкив 20 - шкив 21, жестко соединенный с ведущими кулачками 10 и 11.
На подвижном основании 1 смонтирован опорный ролик 24 для взаимодействия с криволинейным пазом 25 плиты 26. Вал кривошипа 6 связан с электромеханическим приводом 5 устройства.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал кривошипа 6 совершает вращательное движение, которое преобразуется в возвратно-поворотное движение выходного звена (кулисы) 7 механизма 4. Синхронно с выходным звеном 7 возвратно-поворотное движение совершает основание 1, несущее исполнительный механизм 2.
Вращение вала привода 5 посредством шкивов 19, 20 и 21 и гибких элементов 22 и 23 передается ведущим кулачкам 10 и 11 исполнительного механизма. При вращении кулачков оба коромысла 12 и 13 совершают возвратно-поворотные движения с выстоями заданной продолжительности, а выходные звенья 14 и 15 с губками 3 совершают сложные движения, при этом каждое выходное звено совершает поворотное и поступательное движение относительно основания.
Началу рабочего хода устройства соответствует его положение в позиции загрузки (схвата) изделий, при котором выходное звено 7 механизма 4 и основание 1 находятся в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов. При этом губки 3 раскрыты для приема и последующего захвата изделия.
По завершении рабочего хода, т.е. после поворота основания 1 на угол размаха γ, губки 3 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. При выполнении холостого хода устройства положение губок (разжаты, сжаты) зависит от профилей ведущих кулачков 10 и 11.
При работе устройства ролик 24 взаимодействует с криволинейным (дугообразным) пазом 25 плиты 26, исключая прогиб и вибрацию основания 1.
Губки 3, закрепленные на выходных звеньях 14 и 15 исполнительного механизма 2, могут совершать поворотные и поступательные движения относительно основания 1 и выстой заданной продолжительности одновременно или со смещением во времени. Этим обеспечивается возможность выбора закона движения губок, предпочтительного для передаваемых изделий.
Выполнение устройства для передачи изделий в виде системы кинематически связанных между собой кулисного механизма с качающимся выходным звеном и совокупности двух многозвенных кулачково-рычажных механизмов, работающих от общего электромеханического привода, упрощает конструкцию и обеспечивает возможность для повышения производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
Изобретение относится к многозвенным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин, станков, прессов и др. Устройство выполнено в виде комбинированного механизма, содержащего подвижное основание, несущее исполнительный механизм с губками, механизм поворота и привод. Подвижное основание жестко соединено с выходным звеном механизма поворота. Ведущие звенья исполнительного механизма смонтированы на основании с возможностью вращения, а выходные звенья - с возможностью сложного движения. При этом ведущие звенья исполнительного механизма кинематически связаны с ведущим звеном механизма поворота. Кинематическая связь ведущих звеньев содержит шкивы и гибкие элементы. Исполнительный механизм выполнен в виде совокупности двух многозвенных кулачково-рычажных механизмов, каждый из которых содержит ведущий кулачок, коромысло и выходное звено. Изобретение позволит расширить технологические возможности и увеличить производительность устройства. 5 з.п.ф-лы, 1 ил.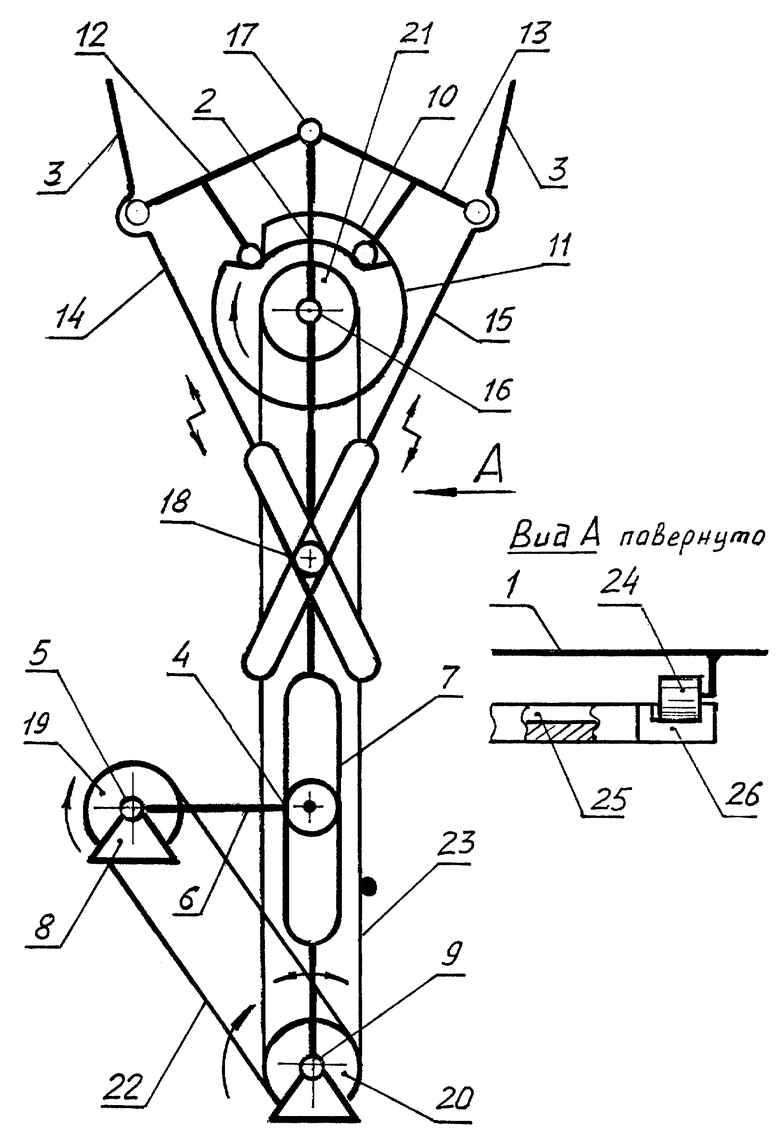
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.9 - 10 | |||
| Механическая рука | 1982 |
|
SU1110623A1 |
| SU 1293022 A2, 28.02.1987 | |||
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

