(21)4208313/24-24
(22)09,03.87
(46) 30.09.88. Бюл. № 36
(71)Ленинградский институт инженеров железнодорожного транспорта
им. В.Н.Образцова
(72)А.Т.Бурков, А.Н.Марикин и И.В.Архипова
(53)681.325 (088.8)
(56)Вентильные двигатели и их применение на электроподвижном составе. /Под ред. Б.И.Тихменева. М.: Транспорт, 1976, с. 158-160.
Авторское свидетельство СССР № 1108575, 1982.
(54)УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА ВЕНТИЛЬНОГО ДВИГАТЕЛЯ
(57)Изобретение относится к автоматике и может быть использовано для синхронизации и управления преобразователями частоты, питающими вентильные двигатели. Цель изобретения - расширение функциональньк возможностей устройства для определения углового положения ротора вентильного двигателя путем формирования управляющих сигналов вентильного двигателя. С этой целью в устройство для определения углового положения
ротора вентильного двигателя, содержащее обтюратор, источник питания, блок оптических преобразований с пятью оптоэлектронными парами, блок электрических преобразований, введена в блок оптических преобразований шестая оптоэлектронная пара, блок электрических преобразований вьшол- нен из шести компараторов и шести усилителей, причем угловой размер прозрачных участков на кольцевой дорожке обтюратора равен 240/р, количество прозрачных участков р/2 и угловой размер между каждой предыдущей и последующей оптоэлектронными парами составляет 20/р, где р - количество полюсов зентильного двигателя. Световой потек от излучателей, моду- лируемьй обтюратором, воспринимается фотоприемниками оптоэлектронных пар, сигналы с которых подаются в блок электрических преобразований . на входы компараторов, формирующих прямоугольные импульсы, которые усиливаются по мощности усилителями. На выходах усилителей формируются сигналы, образующие алгоритм управлеиия инвертором Б 120 град, с одновременным определением углового положения ротора вентильного двигателя. 3 ил.
SS
л
i4 1С
сд
а
-ч
Изобретение относится к автоматике и может быть использовано для синхронизации и управления преобразователями частоты, питающими вентильные двигатели.
Цель изобретения - расширение функциональных возможностей устройства для определения углового положения ротора вентильного двигателя путем обеспечения формирования управляющих сигналов вентильного двигателя.
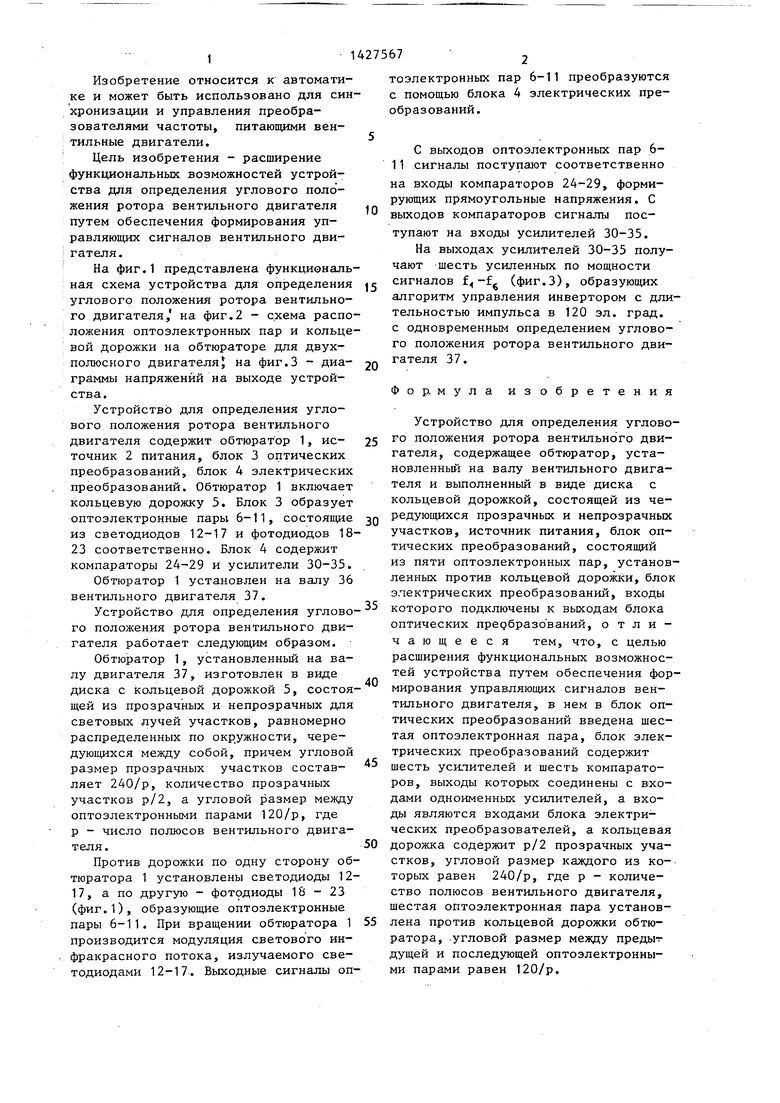
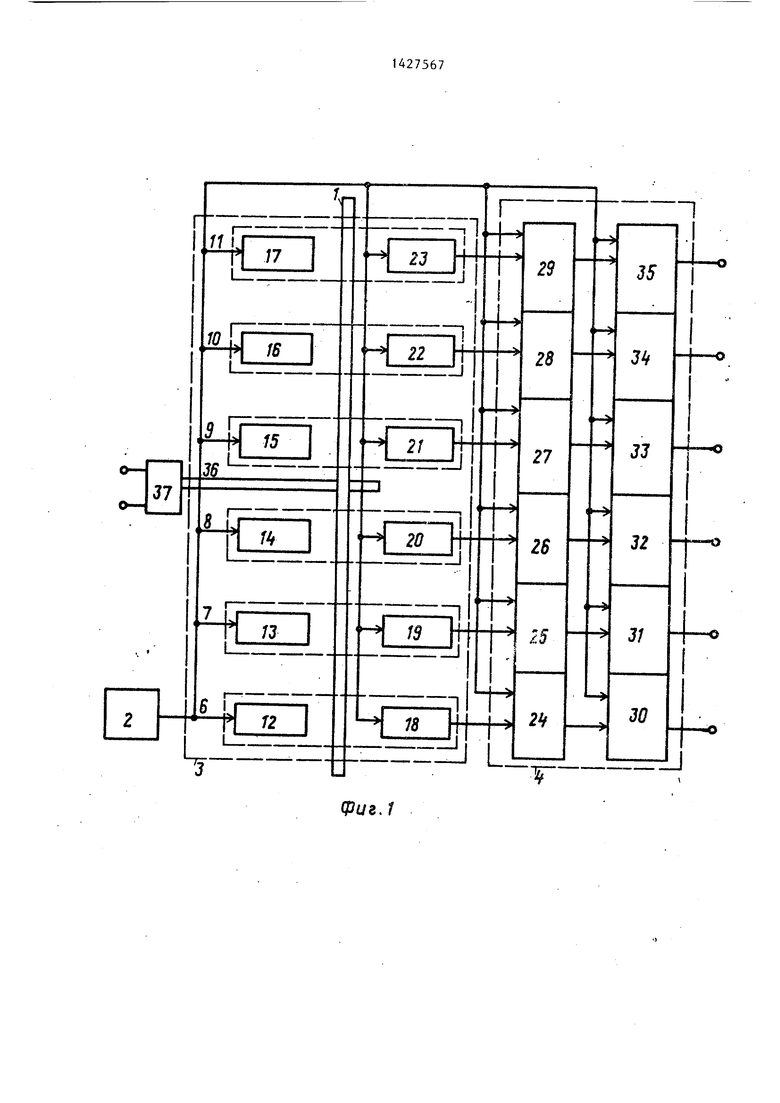
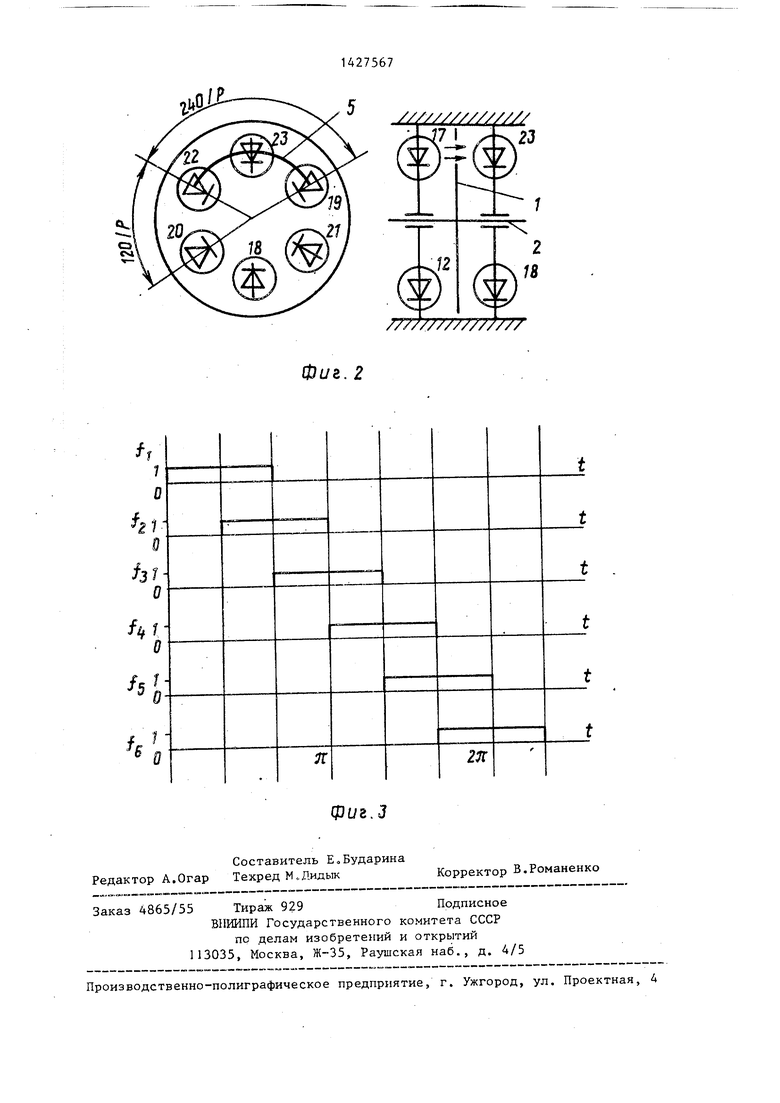
На фиг.1 представлена функциональная схема устройства для определения углового положения ротора вентильного двигателя/ на фиг.2 - схема расположения оптозлектронных пар и кольцевой дорожки на обтюраторе для двухполюсного двигателяJ на фиг.З - диаграммы напряжений на выходе устройства.
Устройство для определения углового положения ротора вентильного двигателя содержит обтюратор 1, источник 2 питания, блок 3 оптических преобразований, блок 4 электрических преобразований. Обтюратор 1 включает кольцевую дорожку 5. Блок 3 образует оптоэлектронные пары 6-11, состоящие из светодиодов 12-17 и фотодиодов 18- 23 соответственно. Блок 4 содержит компараторы 24-29 и усилители 30-35.
Обтюратор 1 установлен на валу 36 вентильного двигателя 37.
Устройство для определения углового положения ротора вентильного двигателя работает следующим образом.
Обтюратор 1, установленный на валу двигателя 37, изготовлен в виде диска с кольцевой дорожкой 5, состоящей из прозрачных и непрозрачных для световых лучей участков, равномерно распределенных по окружности, чередующихся между собой, причем угловой размер прозрачных участков составляет 240/р, количество прозрачных участков р/2, а угловой размер между оптозлектронными парами 120/р, где р - число полюсов вентильного двигателя.
Против дорожки по одну сторону обтюратора 1 установлены светодиоды 12- 17, а по другую - фотодиоды 18-23 (фиг.1), образующие оптоэлектронные пары 6-11. При вращении обтюратора 1 производится модуляция светового инфракрасного потока, излучаемого све- тодиодами 12-17. Выходные сигналы оптоэлектронньгх пар 6-11 преобразуются с помощью блока 4 электрических преобразований.
С выходов оптоэлектронных пар 6- 11 сигналы поступают соответственно
на входы компараторов 24-29, формирующих прямоугольные напряжения. С выходов компараторов сигналы поступают на входы усилителей 30-35.
На выходах усилителей 30-35 получают шесть усиленных по мощности сигналов (фиг.З), образующих алгоритм управления инвертором с длительностью импульса в 120 эл. град, с одновременным определением углового положения ротора вентильного двигателя 37.
Формула изобретения
Устройство для определения углового положения ротора вентильного двигателя, содержащее обтюратор, установленный на валу вентильного двигателя и выполненный в виде диска с кольцевой дорожкой, состоящей из чередующихся прозрачных и непрозрачных участков, источник питания, блок оптических преобразований, состоящий из пяти оптоэлектронных пар, установленных против кольцевой дорожки, блок электрических преобразований, входы
которого подключены к выходам блока оптических прербразо ваний, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем обеспечения формирования управляющих сигналов вентильного двигателя, в нем в блок оптических преобразований введена шестая оптоэлектронная пара, блок электрических преобразований содержит
шесть усилителей и шесть компараторов, выходы которых соединены с входами одноименных усилителей, а входы являются входами блока электрических преобразователей, а кольцевая
дорожка содержит р/2 прозрачных участков, угловой размер каждого из которых равен 240/р, где р - количество полюсов вентильного двигателя, шестая ойтоэлектронная пара установлена против кольцевой дорожки обтюратора, .угловой размер между предыт дущей и последующей оптоэлектронны- ми парами равен 120/р.
cpue.l
///////////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углового положения ротора вентильного двигателя | 1982 |
|
SU1108575A1 |
| Устройство для определения углового положения ротора вентильного электродвигателя | 1985 |
|
SU1295484A1 |
| РЕПУЛЬСИОННЫЙ ВЕНТИЛЬНЫЙ РЕВЕРСИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2187190C2 |
| Датчик положения вентильного двигателя | 1989 |
|
SU1744768A1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| Устройство автоматической фокусировки объектива | 1991 |
|
SU1793418A1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2012 |
|
RU2494518C1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| МОДУЛЬ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКОЙ КАРБЮРАТОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2182671C2 |

Фиг. 2
