Настоящее изобретение относится к устройству управления силовой передачей, содержащему по меньшей мере одну основную силовую передачу, первый ведущий мост, постоянно приводимый в действие посредством основной силовой передачи, по меньшей мере одну вспомогательную силовую передачу и второй ведущий мост, подключаемый к основной силовой передаче посредством вспомогательной силовой передачи, содержащей по меньшей мере один первый блок сцепления и по меньшей мере один второй блок сцепления, расположенный во вспомогательной силовой передаче ниже по потоку от первого блока сцепления для присоединения второго ведущего моста к основной силовой передаче, с блоком управления, который управляет активацией муфт и вследствие этого мощностью, переданной на второй ведущий мост.
В документе DE 10 2006 045 007 раскрыта силовая передача механического транспортного средства, содержащая основную силовую передачу, первый ведущий мост, постоянно присоединенный с приведением в действие к основной силовой передаче, вспомогательную силовую передачу и второй ведущий мост, подключаемый к основной силовой передаче посредством вспомогательной силовой передачи, причем вспомогательная силовая передача содержит первый блок сцепления для присоединения второго ведущего моста к основной силовой передаче и второй блок сцепления, расположенный в трансмиссии ниже по потоку от первого блока сцепления.
Целью настоящего изобретение является создание устройства управления силовой передачей для силовой передачи механического транспортного средства, содержащей основную силовую передачу для первого моста и вспомогательную силовую передачу для второго моста, автоматически в случае необходимости активируемую для присоединения второго ведущего моста.
Согласно настоящему изобретению предусмотрено устройство управления силовой передачей для силовой передачи механического транспортного средства, содержащее по меньшей мере одну основную силовую передачу, первый ведущий мост, постоянно приводимый в действие посредством основной силовой передачи, по меньшей мере одну вспомогательную силовую передачу и второй ведущий мост, подключаемый к основной силовой передаче посредством вспомогательной силовой передачи, которая содержит первый блок сцепления и по меньшей мере один второй блок сцепления, расположенный в трансмиссии ниже по потоку от первого блока сцепления для присоединения второго ведущего моста к основной силовой передаче, и блок управления, который по меньшей мере в одном из следующих режимов работы
включает при наличии заданного рабочего условия по меньшей мере один второй блок сцепления вспомогательной силовой передачи для переключения в ждущий режим работы, и
при активном ждущем режиме работы включает первый блок сцепления вспомогательной силовой передачи для присоединения подключаемого второго ведущего моста в зависимости по меньшей мере от одного параметра и устанавливает посредством этого режим работы 6х4 или, соответственно, выключает второй блок сцепления для переключения в нормальный режим работы, в котором вспомогательная силовая передача также отсоединена.
Настоящее изобретение основано на устройстве управления силовой передачей для силовой передачи механического транспортного средства, содержащем по меньшей мере одну основную силовую передачу, первый ведущий мост, постоянно приводимый в действие посредством основной силовой передачи, по меньшей мере одну вспомогательную силовую передачу и второй ведущий мост, подключаемый к основной силовой передаче посредством вспомогательной силовой передачи, причем вспомогательная силовая передача содержит по меньшей мере один первый блок сцепления и по меньшей мере один второй блок сцепления, расположенный в трансмиссии ниже по потоку от первого блока сцепления, с блоком управления, который по меньшей мере переключает ждущий режим работы в рабочее состояние при наличии заданного рабочего условия посредством включения по меньшей мере одного второго блока сцепления и, начиная от ждущего режима работы, присоединяет подключаемый второй ведущий мост в зависимости по меньшей мере от одного параметра посредством включения по меньшей мере одного первого блока сцепления вспомогательной силовой передачи. Таким образом, присоединение подключаемого второго ведущего моста может быть быстро выполнено. В случае необходимости быстрого присоединения второго ведущего моста присоединение второго ведущего моста может быть выполнено быстрее и лучше. Предпочтительно присоединение второго ведущего моста может быть выполнено автоматически под управлением блока управления. Под выражением «рабочее условие» главным образом подразумевают условие, которое соответствует значению по меньшей мере одного параметра для активирования чего-либо. Под выражением «параметр» подразумевают измеряемое значение, которое описывает рабочее состояние силовой передачи механического транспортного средства. Под выражением «ждущий режим работы» подразумевают режим работы, в котором второй блок сцепления включен, а первый блок сцепления выключен. В ждущем режиме работы силовая передача механического транспортного средства подготовлена для присоединения подключаемого второго ведущего моста. Под выражением «режим работы 6х4» подразумевают режим работы, в котором первый и второй блоки сцепления включены, в результате чего подключаемый второй ведущий мост присоединен к первому ведущему мосту с постоянным приводом. Под выражением «подготовлен» подразумевают в этом случае, что второй ведущий мост может быть присоединен в случае необходимости лишь посредством включения одного блока сцепления.
Кроме того, предусмотрено, что блок управления, начиная от ждущего режима работы, выполняет переключение в нормальный режим работы при наличии дополнительного рабочего условия посредством выключения по меньшей мере одного второго блока сцепления. Посредством обеспечения альтернативы присоединению второго ведущего моста адаптационная способность устройства управления силовой передачей может быть увеличена. Под выражением «нормальный режим работы» главным образом подразумевают режим работы, в котором первый блок сцепления и второй блок сцепления выключены. В нормальном режиме работы силовая передача механического транспортного средства может предпочтительно функционировать в режиме с низкими по сравнению со ждущим режимом работы потерями. В этом контексте режим с низкими потерями означает, что только основная силовая передача передает крутящий момент. В нормальном режиме работы не происходит вращения части вспомогательной силовой передачи. В нормальном режиме работы вспомогательная силовая передача функционально разделена, причем вспомогательная силовая передача, ответвляющаяся от основной силовой передачи, приводящей в действие первый ведущий мост, для приведения в действие второго ведущего моста отсоединена.
Кроме того, предусмотрено, что блок управления, начиная от нормального режима работы, синхронизирует по меньшей мере один второй блок сцепления посредством периодического включения по меньшей мере одного первого блока сцепления для переключения в ждущий режим работы. Таким образом, может быть достигнуто надежное и комфортное переключение из нормального режима работы в ждущий режим работы. Под выражением «периодическое включение» главным образом подразумевают, что первый блок сцепления включают только для синхронизации по меньшей мере одного второго блока сцепления. Интервал включения главным образом зависит от разности скоростей по всему по меньшей мере одному второму блоку сцепления. Следовательно, состояние включения поддерживают до тех пор, пока разность скоростей не будет находиться в заданном диапазоне разности скоростей, или пока не истечет максимальный интервал времени, заложенный в блоке управления. Таким образом, интервал варьируется в области от нуля до максимального периода времени. Максимальный период времени предпочтительно составляет от 1 до 10 секунд и особенно предпочтительно от 1 до 5 секунд.
Согласно предпочтительной конфигурации блок управления предотвращает переключение блоков сцепления в течение заданного интервала времени, посредством чего может быть предотвращена частая смена режимов работы. Под выражением «заданный интервал времени» подразумевают интервал времени, значение которого заложено в блоке управления. Таким образом, блок управления может быть выполнен с возможностью увеличения значения в зависимости от параметра сцепления. Значение заданного интервала времени предпочтительно составляет от 5 до 60 секунд, предпочтительно от 5 до 30 секунд и особенно предпочтительно от 5 до 15 секунд. Под выражением «параметр сцепления» подразумевают параметр, который характеризует, в какой степени присутствующий в ведущих колесах крутящий момент может быть передан дороге. Поверхность дороги, например сухая (нормальная) дорога, может быть идентифицирована посредством параметра сцепления.
Предпочтительно, чтобы блок управления определял рабочее условие для переключения в ждущий режим работы и рабочее условие для переключения в нормальный режим работы в зависимости от одного и того же параметра. Таким образом, рабочие условия могут быть заданы простым способом.
Кроме того, предпочтительно, чтобы силовая передача механического транспортного средства содержала по меньшей мере один мост без механического привода, а блок управления определял параметр посредством моста без механического привода. Таким образом, предпочтительный параметр может быть обеспечен простым способом. Под выражением «мост без механического привода» подразумевают главным образом мост без постоянного механического привода. Мост без постоянного механического привода предпочтительно постоянно отсоединен от основной силовой передачи и вспомогательной силовой передачи, т.е. присоединение к основной силовой передаче или вспомогательной силовой передаче является невозможным.
Кроме того, предусмотрено, что рабочее условие для переключения в ждущий режим работы и рабочее условие для переключения в нормальный режим работы заданы двумя различными значениями предела скорости. Таким образом, слишком частое переключение вперед и назад из ждущего режима работы в нормальный режим работы и наоборот может быть предпочтительно предотвращено.
Согласно предпочтительной конфигурации режим работы 6х4 устанавливают при скорости транспортного средства ниже третьего значения предела скорости, в результате чего его устанавливают при начале движения транспортного средства и при очень низких скоростях транспортного средства. Блок управления может дополнительно проверить, находится ли крутящий момент двигателя выше порогового значения крутящего момента двигателя. Износ шин ведущих колес является экспоненциальной функцией продольного усилия, приложенного к шине. В режиме работы 6х4 происходит равномерное распределение крутящего момента между первым и вторым задними ведущими мостами. Установление режима работы 6х4 в упомянутых ситуациях обеспечивает равномерный износ шин колес и помогает увеличить срок эксплуатации шин первого заднего ведущего моста.
Чрезвычайно предпочтительно, чтобы блок управления и/или регулирования адаптировал по меньшей мере одно из условий для изменения режима работы к параметру сцепления по меньшей мере в одном рабочем состоянии. Таким образом, упомянутые условия могут быть адаптированы к окружающей среде и поверхности дороги.
Согласно предпочтительной конфигурации блок управления отслеживает температуру масла главной передачи второго ведущего моста и включает первый блок сцепления, когда температура масла ниже порогового значения температуры. При продолжительной работе в нормальном режиме (главная передача (дифференциал) второго ведущего моста неподвижна) и при низких окружающих температурах масло в маслосборнике второго моста может перейти в полутвердое состояние. Последующее включение второго блока сцепления при переходе в ждущий режим работы может вызвать резкий импульс крутящего момента в мосте. В результате периодического включения первого блока сцепления происходит вращение приводной шестерни второй главной передачи и нагревание масла в маслосборнике.
Согласно предпочтительной конфигурации блок управления включает режим работы 6x4, когда компрессионные тормоза двигателя активны. Износ шин ведущих колес является экспоненциальной функцией продольного усилия, приложенного к шине. Включение режима работы 6х4 обеспечивает равномерное распределение отрицательного крутящего момента между первой и второй главной передачей для обеспечения равномерного износа шин колес. Это позволяет увеличить срок службы шин первого ведущего моста.
Согласно предпочтительной конфигурации блок управления присоединяет приводной вал основной силовой передачи к приводному валу вспомогательной силовой передачи по меньшей мере в одном рабочем состоянии посредством по меньшей мере первого блока сцепления. Таким образом, присоединение второго ведущего моста может быть реализовано простым способом.
Кроме того, предусмотрено, что вспомогательная силовая передача содержит по меньшей мере одну главную передачу (дифференциал), а второй блок сцепления содержит по меньшей мере две муфты, расположенные в трансмиссии после главной передачи, и блок управления и/или регулирования одновременно выключает две муфты второго блока сцепления для переключения в нормальный режим работы. Таким образом, отсоединение ведущих колес второго ведущего моста может быть выполнено простым способом посредством вспомогательной силовой передачи.
Настоящее изобретение будет более понятно при прочтении последующего описания его конкретного варианта осуществления на основе прилагаемых фигур.
Краткое описание фигур
На фиг.1 представлена первая силовая передача механического транспортного средства с устройством управления силовой передачей, и
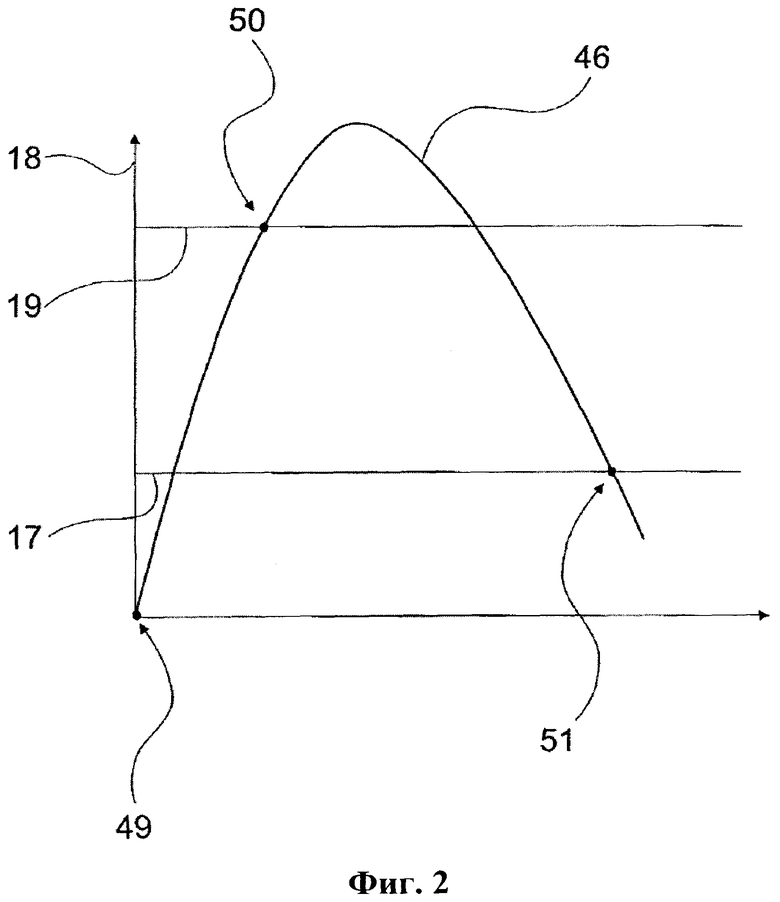
на фиг.2 представлен график, на котором представлены скорость транспортного средства, первое рабочее условие и второе рабочее условие в зависимости от времени.
Подробное раскрытие предпочтительного варианта осуществления
На фиг.1 схематически представлена силовая передача механического транспортного средства с устройством управления силовой передачей согласно настоящему изобретению. Силовая передача механического транспортного средства является силовой передачей грузового автомобиля большой грузоподъемности. Силовая передача механического транспортного средства содержит непоказанный мост без механического привода, основную силовую передачу 10, вспомогательную силовую передачу 12, постоянно присоединенный первый ведущий мост 11 и подключаемый и отключаемый второй ведущий мост 13.
Основная силовая передача 10 постоянно соединена с первым ведущим мостом 11. Основная силовая передача 10 содержит приводной вал 20, приводную шестерню 25, главную передачу 47 и механизм 48 блокировки дифференциала. Приводной вал 20 передает крутящий момент к силовой передаче механического транспортного средства. Приводная шестерня 25 приводится в действие посредством приводного вала 20. Приводная шестерня 25 приводит в действие главную передачу 47 первого ведущего моста 11. Главная передача 47 образует дифференциал. Приводной вал 20 всегда соединен с главной передачей первого ведущего моста 11. Главная передача первого ведущего моста 11 приводит в действие ведущие колеса 26 первого ведущего моста 11. В случае необходимости механизм 48 блокировки дифференциала блокирует дифференциал посредством соединения ведущих колес 26 друг с другом защищенным от потерь крутящего момента способом. Приводной вал 20 всегда соединен с первым ведущим мостом 11 посредством приводной шестерни 25.
В случае необходимости вспомогательная силовая передача 12 присоединяет второй ведущий мост 13 к основной силовой передаче 10. Вспомогательная силовая передача 12 приводит в действие второй ведущий мост 13, который может быть соединен с основной силовой передачей 10. Вспомогательная силовая передача 12 содержит (закрепленный) приводной вал 21, приводную шестерню 27, главную передачу 22 (дифференциал) и две приводные полуоси 28, 29. Приведение в действие приводной шестерни 27 происходит посредством закрепленного приводного вала 21. Приводная шестерня 27 приводит в действие главную передачу 22 второго ведущего моста 13. Главная передача 22 образует дифференциал. Закрепленный приводной вал 21 постоянно соединен с главной передачей 22 второго ведущего моста 13. Главная передача 22 приводит в действие ведущие колеса 30 второго ведущего моста 13 при помощи двух приводных полуосей 28, 29.
Вспомогательная силовая передача 12 содержит первый блок 14 сцепления и второй блок 15 сцепления для соединения подключаемого второго ведущего моста с основной силовой передачей 10 или с постоянным приводом, соединенным с первым ведущим мостом 11. Первый блок 14 сцепления соединяет вспомогательную силовую передачу 12 с основной силовой передачей 10. Второй блок 15 сцепления соединяет ведущие колеса 30 второго ведущего моста 13 со вспомогательной силовой передачей 12.
Первый блок 14 сцепления расположен в трансмиссии выше по потоку от приводной шестерни 25 и приводной шестерни 27. Первый блок 14 сцепления выполнен в виде муфты переключения с фрикционной блокировкой. Первый блок 14 сцепления сформирован посредством многодисковой муфты с возможностью проскальзывания. Он содержит камеру активации для рабочей среды под давлением. Рабочая среда под давлением является сжатым воздухом, подаваемым исполнительным механизмом. Давление активации может быть создано в камере активации исполнительным механизмом 31 посредством рабочей среды под давлением. Исполнительный механизм 31 образует пневматический привод. Исполнительный механизм 31 содержит 3/2-ходовой клапан с электрическим управлением. Управление клапаном происходит посредством блока 16 управления с использованием ШИМ-сигнала (широтно-импульсная модуляция) для изменения продолжительности включения клапана, который в свою очередь изменяет выходное давление к камере активации. Первый блок 14 сцепления может также по существу быть выполнен в виде внешне переключаемой муфты с соответствием по форме. Исполнительный механизм 31 может также по существу образовывать электромеханический, электромагнитный или гидравлический привод. Два рабочих состояния сцепления первого блока 14 сцепления могут быть отрегулированы посредством давления активации.
Первый блок 14 сцепления является полностью выключенным в первом рабочем состоянии сцепления. Вспомогательная силовая передача 12 отсоединена от основной силовой передачи 10 в первом рабочем состоянии сцепления первого блока 14 сцепления. В первом рабочем состоянии сцепления приводной вал 20 отсоединен от закрепленного приводного вала 21. В первом рабочем состоянии сцепления первый блок 14 сцепления не передает крутящий момент на закрепленный приводной вал 21.
Первый блок 14 сцепления является полностью включенным во втором рабочем состоянии сцепления. Первый блок 14 сцепления соединяет приводной вал 20 основной силовой передачи 10 с закрепленным приводным валом 21 вспомогательной силовой передачи 12 во втором рабочем состоянии сцепления. Во втором рабочем состоянии сцепления вспомогательная силовая передача 12 соединена с основной силовой передачей 10. Во втором рабочем состоянии сцепления первый блок 14 сцепления передает крутящий момент на закрепленный приводной вал 21.
Второй блок 15 сцепления расположен в трансмиссии ниже по потоку от приводной шестерни 27. Второй блок 15 сцепления содержит две муфты 23, 24 с блокировкой по форме. Второй блок 15 сцепления установлен на втором ведущем мосте 13. Каждая из двух муфт 23, 24 соответственно связана с одним из ведущих колес 30. Второй блок 15 сцепления отсоединяет вспомогательную силовую передачу 12 от главной передачи 22 посредством отсоединения ведущих колес 30 при помощи одновременного выключения двух муфт 23, 24. Второй блок 15 сцепления разделяет второй ведущий мост 13 на главную передачу 22 и две приводные полуоси 28, 29. Главная передача 22 находится в постоянном соединении с приводным валом 21. Две приводные полуоси 28, 29 могут быть отсоединены от приводного вала 21 и, следовательно, от главной передачи 22. Ведущие колеса 30 могут быть приведены в действие приводными полуосями 28, 29.
Две муфты 23, 24 расположены в трансмиссии после главной передачи 22. Они являются переключаемыми зубчатыми муфтами, т.е. двумя муфтами 23, 24 с блокировкой по форме, содержащими муфту переключения, подробно не показанную, управление которой может быть выполнено вилкой переключения, подробно не показанной, посредством аксиального продольного перемещения. Перемещение вилки переключения выполняют посредством исполнительного механизма 32. Исполнительный механизм 32 выполнен в виде пневматического привода. Исполнительный механизм 32 содержит 3/2-ходовой клапан с электрическим управлением. Исполнительный механизм 32 может также по существу образовывать электромеханический, электромагнитный или гидравлический привод. Два рабочих состояния сцепления второго блока 15 сцепления могут быть отрегулированы посредством исполнительного механизма 32.
Второй блок 15 сцепления является полностью выключенным в первом рабочем состоянии сцепления. Следовательно, ведущие колеса 30 отсоединены от вспомогательной силовой передачи 12. В случае полного выключения двух муфт 23, 24 в первом рабочем состоянии сцепления происходит прерывание вспомогательной силовой передачи 12. Второй блок 15 сцепления не передает крутящий момент от закрепленного приводного вала 21 на ведущие колеса 30, поскольку приводные полуоси 28, 29 отсоединены от главной передачи 22.
Второй блок 15 сцепления является полностью включенным во втором рабочем состоянии сцепления, в результате чего второй блок 15 сцепления передает крутящий момент от приводного вала 21 на ведущие колеса 30 второго ведущего моста 13. Во втором рабочем состоянии сцепления приводные полуоси 28, 29 соединены с главной передачей 22 и ведущие колеса 30 соединены с приводным валом 20.
Силовая передача механического транспортного средства может содержать две дополнительные муфты (не показаны) в первом ведущем мосту между главной передачей (дифференциалом) и ведущими колесами. Эти дополнительные муфты относятся к тому же типу, что и муфты второго блока сцепления второго ведущего моста. Их функционирование происходит точно также. Муфты выключены при качении транспортного средства с отсоединенной силовой передачей (т.е. в коробке передач включена нейтральная передача). Это обеспечивает то, что основной привод на ведущие колеса и первая главная передача (дифференциал) являются неподвижными в подобных ситуациях и тем самым вызывают дополнительное снижение паразитных потерь для максимального эффекта экономии топлива. Когда водитель сообщает о необходимости использования мощности двигателя (конец качения), скорость привода на ведущие колеса вначале доводится до определенного уровня посредством коробки передач. Это позволяет выполнить синхронизацию кольцевого зубчатого колеса и боковых валов перед сцеплением двух дополнительных зубчатых муфт. Приведение в действие двух дополнительных зубчатых муфт происходит автоматически посредством системы управления с использованием пневматических клапанов.
Устройство управления силовой передачей управляет вышеописанной силовой передачей механического транспортного средства. Устройство управления силовой передачей содержит блок 16 управления для автоматического приведения в действие первого блока 14 сцепления и второго блока 15 сцепления силовой передачи механического транспортного средства.
Блок 16 управления посредством линии 33 электропередачи связан с исполнительным механизмом 31, а посредством линии 34 электропередачи с исполнительным механизмом 32. Блок 16 управления и регулирования регулирует посредством исполнительного механизма 31 давление активации или рабочее состояние сцепления первого блока 14 сцепления и посредством исполнительного механизма 32 рабочее состояние сцепления второго блока 15 сцепления.
Устройство управления силовой передачей содержит датчик 35 давления для измерения давления в камере активации первого блока 14 сцепления, а также для закрытия сервоконтура исполнительного механизма 31. Блок 16 управления и регулирования связан посредством линия 36 электропередачи с датчиком давления.
Устройство управления силовой передачей содержит регулируемый клапан 37 управления давлением для снижения давления активации в камере активации первого блока 14 сцепления, и, следовательно, для быстрого открытия первого блока 14 сцепления. В случае необходимости клапан 37 управления давлением выпускает рабочую среду из первого блока 14 сцепления. Клапан 37 управления давлением расположен между исполнительным механизмом 31 и датчиком 35 давления.
Устройство управления силовой передачей содержит обходной канал для перекрытия исполнительного механизма 31 и исполнительного механизма 32 или для перекрытия одного из исполнительных механизмов 31, 32. Обходной канал направляет рабочую среду под давлением в обход исполнительного механизма 31 или исполнительного механизма 32 или в обход обоих исполнительных механизмов 31, 32 по меньшей мере в одном рабочем состоянии. Обходной канал соединяет сторону выпуска исполнительного механизма 31 или впуск клапана 37 управления давлением со стороной выпуска исполнительного механизма 32 технологически допускающим поток способом. Обходной канал дополнительно соединяет выпуск исполнительного механизма 31 или впуск клапана управления давлением 37 с впуском исполнительного механизм 32 технологически допускающим поток способом. Обходной канал содержит дополнительный клапан 38 управления давлением между выпуском из исполнительного механизма 31 или впуском клапана управления давлением и впуском исполнительного механизма 32. Клапан 38 управления давлением управляет потоком по обходному каналу.
С целью идентификации рабочего состояния сцепления второго блока 15 сцепления устройство управления силовой передачей содержит подробно не показанную сенсорную систему. Сенсорная система соответственно содержит датчики на двух муфтах 23, 24. Блок управления 16 посредством линии 39 электропередачи соединен с датчиками.
Устройство управления силовой передачей дополнительно содержит датчик, подробно не представленный, для синхронизации главной передачи 22 с приводными полуосями 28, 29. Датчик определяет скорость главной передачи 22. Блок управления посредством линии 40 электропередачи соединен с датчиком.
Блок 16 управления также соединен с шиной 41 сети локальных контроллеров грузового автомобиля большой грузоподъемности, содержащего устройство управления силовой передачей и силовую передачу механического транспортного средства. В частности, блок 16 управления соединен с блоком 42 управления двигателем, блоком 43 управления коробкой передач и блоком 44 управления антиблокировкой тормозов.
Блок 16 управления характеризуется ждущим режимом работы, нормальным режимом работы и режимом работы 6х4. В нормальном режиме работы первый блок 14 сцепления и второй блок 15 сцепления характеризуются соответственно своим первым рабочим состоянием сцепления, то есть первый блок 14 сцепления и второй блок 15 сцепления полностью выключены. Следовательно, ведущие колеса 30 отсоединены от вспомогательной силовой передачи 12.
В ждущем режиме работы первый блок 14 сцепления характеризуется первым рабочим состоянием сцепления, а второй блок 15 сцепления характеризуется вторым рабочим состоянием сцепления, т.е. только две муфты 23, 24 второго блока 15 сцепления включены. Следовательно, ведущие колеса 30 соединены со вспомогательной силовой передачей 12.
В режиме работы 6х4 первый блок 14 сцепления и второй блок 15 сцепления характеризуются вторым рабочим состоянием сцепления, т.е. первый блок 14 сцепления и второй блок 15 сцепления включены. Следовательно, ведущие колеса 30 соединены с основной силовой передачей 10.
Для соединения подключаемого второго ведущего моста 13 с первым ведущим мостом 11 с постоянным приводом вначале блок 16 управления при наличии заданного рабочего условия 17 выполняет переключение в ждущий режим посредством одновременного включения муфт 23, 24 второго блока 15 сцепления вспомогательной силовой передачи 12. Впоследствии блок соединяет, начиная от ждущего режима работы, подключаемый второй ведущий мост 13 с первым ведущим мостом 11 с постоянным приводом в зависимости от параметра 18, в случае необходимости посредством включения первого блока 14 сцепления вспомогательной силовой передачи 12 (см. фиг.2).
Альтернативно, для присоединения подключаемого второго ведущего моста 13 блок 16 управления выполняет переключение в нормальный режим работы, начиная от ждущего режима работы, при наличии рабочего условия 19, в результате чего блок 16 управления снова выключает второй блок 15 сцепления. Для этого блок 16 управления одновременно выключает две муфты 23, 24 второго блока 15 сцепления.
Для переключения в ждущий режим работы, начиная от нормального режима работы, блок 16 управления периодически переключает первый блок 14 сцепления и синхронизирует второй блок 15 сцепления или главную передачу 22 с приводными полуосями 28, 29. Блок 16 управления завершает синхронизацию в случае, если разность скоростей между приводными полуосями 28, 29 и ведущими колесами 30 находится в заданном диапазоне разности скоростей, или после истечения максимального периода времени, заложенного в блоке 16 управления. Согласно этому варианту осуществления максимальный период времени составляет три секунды.
Блок 16 управления выполняет переключение в ждущий режим работы ниже рабочего состояния 17, причем ждущий режим работы остается активным ниже рабочего состояния 19. Выше рабочего состояния 19 блок 16 управления выполняет переключение в нормальный режим работы. Активированный нормальный режим работы остается активным выше рабочего состояния 17.
Блок 16 управления определяет рабочее состояние 17 для переключения в ждущий режим работы и рабочее состояние 19 для переключения в нормальный режим работы в зависимости от одного и того же параметра 18. Параметр 18 определяет действие блока 16 управления посредством моста без механического привода. Параметр 18 представляет собой скорость грузового автомобиля большой грузоподъемности, содержащего устройство управления силовой передачей и силовую передачу механического транспортного средства.
Рабочее состояние 17 для переключения в ждущий режим работы и рабочее состояние 19 для переключения в нормальный режим работы заданы двумя различными значениями предела скорости. Первое рабочее состояние 17 определено в качестве нижнего предела скорости. Второе рабочее состояние 19 определено в качестве верхнего предела скорости.
Заданный интервал времени сохранен в блоке 16 управления для предотвращения частого изменения между ждущим режимом работы и нормальным режимом работы. В течение этого заданного интервала времени блок 16 управления препятствует переключению блоков 14, 15 сцепления, в результате чего будут предотвращены излишние многочисленные обратные переключения из ждущего режима работы в нормальный режим работы и из нормального режима работы в ждущий режим работы. Заданный интервал времени определен в качестве минимального времени активации ждущего режима работы и нормального режима работы. Переход из ждущего режима работы в нормальный режим работы и наоборот возможен только после истечения этого заданного интервала времени. Блок 16 управления активирует счетчик для заданного интервала времени в момент активации ждущего режима работы или нормального режима работы. Согласно этому варианту осуществления продолжительность заданного интервала времени составляет 10 секунд.
Для присоединения второго ведущего моста 13 в зависимости от параметра 18 значение предела пробуксовывания, например, заложено в блоке 16 управления в зависимости от указанного параметра. Блок 16 управления сравнивает параметр 18, представляющий собой скорость, со скоростью первого ведущего моста 11, определенной при помощи непредставленной сенсорной системы. Если значение пробуксовывания между мостом без механического привода и первым ведущим мостом 11 больше значения предела пробуксовывания, то блок 16 управления присоединяет второй ведущий мост 13 к первому ведущему мосту 11 и, тем самым, присоединяет второй ведущий мост 13 к основной силовой передаче 10.
Во время поворота транспортного средства колеса переднего моста вращаются быстрее первого ведущего моста. Так что во время поворота пробуксовывание вычисляют исходя из скорости второго ведущего моста 13 без привода вместо скорости переднего моста.
Присоединение второго ведущего моста 13 к первому ведущему мосту 11, однако, происходит в зависимости от нескольких дополнительных параметров. Для этого блок 16 управления оценивает информацию, связанную с динамикой движения и дорожной обстановкой, такую как скорость движения, ускорение движения, частота вращения двигателя, положения педали акселератора, уклон дороги и состояние загрузки, измеренные подробно непредставленной сенсорной системой. Блок 16 управления определяет, например, начало, повышение или инициирование положительного ускорения транспортного средства из этой информации. Если состояние загрузки грузового автомобиля большой грузоподъемности вызывает необходимость подключения второго ведущего моста 13, то блок 16 управления присоединяет второй ведущий мост 13 к первому ведущему мосту 11 с постоянным приводом.
Блок 16 управления определяет параметр сцепления. Параметр сцепления классифицирует поверхность дороги, следовательно, он показывает, насколько хорошо крутящий момент передается от ведущих колес к дороге.
Поверхность дороги классифицируют (нормальная, скользкая и очень скользкая) исходя из следующих параметров:
- Продолжительность активации сцепления в реальном времени первого блока 14 сцепления:
- активацию первого блока 14 сцепления записывают в буфер в течение определенного периода для расчета среднего значения продолжительности активации. Вычисляют средневзвешенное значение этого текущего значения продолжительности активации и предыдущего значения продолжительности активации для вычисления продолжительности активации.
- Высокое значение продолжительности активации указывает на неблагоприятные условия и очень скользкую поверхность. Если значение продолжительности активации падает ниже нижнего порогового значения, это указывает на то, что дорожные условия являются удовлетворительными, а поверхность дороги нормальной.
- Окружающая температура:
- низкая окружающая температура также указывает на неблагоприятные дорожные условия.
- Работа стеклоочистителя ветрового стекла:
- Работу стеклоочистителя ветрового стекла записывают в буфер в течение определенного периода для расчета среднего значения работы стеклоочистителя. Активный в течение определенного периода стеклоочиститель указывает на мокрую и скользкую поверхность дороги.
Для переключения в нормальный режим работы блок 16 управления адаптирует заданный интервал времени и значения рабочего условия 19 относительно параметра сцепления. Если блок 16 управления идентифицирует, например, скользкую дорогу, то происходит повышение значения второго рабочего условия 19 и увеличение заданного интервала времени.
На фиг.2 представлено примерное изменение скорости транспортного средства 46, которая представляет первое рабочее условие 17 и второе рабочее условие 19. В случае начала в точке 49 блок 16 управления идентифицирует скорость транспортного средства 46 ниже первого рабочего условия 17. Следовательно, первое рабочее условие 17 выполнено. Поскольку представлено, что скорость транспортного средства 46 равняется нулю, блок 16 управления в этой точке выполняет переключение в ждущий режим работы без предварительной синхронизации главной передачи 22 с ведущими колесами 30. Затем блок 16 управления поддерживает ждущий режим работы до тех пор, пока скорость транспортного средства не превысит верхний предел скорости, посредством которого задано второе рабочее условие 19.
Начиная от точки 49, происходит повышение скорости транспортного средства 46. Блок 16 управления идентифицирует скорость транспортного средства 46 выше верхнего предела скорости в точке 50. Следовательно, второе рабочее условие 19 выполнено, на основании чего блок 16 управления выполняет переключение из ждущего режима работы в нормальный режим работы в точке 50. Для этого блок 16 управления одновременно выключает две муфты 23, 24.
Начиная от максимального значения скорости транспортного средства 46, которую могут по существу поддерживать в течение интервала времени произвольной длины, происходит повторное снижение скорости транспортного средства 46. Блок 16 управления идентифицирует скорость транспортного средства 46 ниже нижнего предела скорости в точке 51. Следовательно, первое рабочее условие 17 выполнено, на основании чего блок 16 управления выполняет переключение из нормального режима работы в ждущий режим работы в точке 51. Поскольку скорость транспортного средства 46 не равна нулю, блок 16 управления вначале прикладывает к камере активации низкое давление активации и, тем самым, периодически включает первый блок 14 сцепления. Тем самым, блок 16 управления предварительно синхронизирует главную передачу 22 второго ведущего моста 13 с ведущими колесами 30 второго ведущего моста 13. После успешной синхронизации или после истечения максимального периода времени блок 16 управления впоследствии выполняет переключение в ждущий режим работы посредством выполнения вначале включения второго блока сцепления 15, тогда как первый блок 14 сцепления остается выключенным посредством поддержания сниженного давления активации в камере активации первого блока 14 сцепления при помощи клапана 37 управления давлением.
Блок 16 управления выполняет адаптацию упомянутых выше верхнего и нижнего пределов скорости согласно параметру сцепления. Например, происходит повышение пределов скорости при скользких дорожных условиях.
Если блок 16 управления идентифицирует пробуксовывание между колесами моста без механического привода и первого моста 11 с постоянным приводом во время активного ждущего режима работы, значение которого больше значения предела пробуксовывания, или если блок 16 управления идентифицирует необходимость подключения подключаемого второго ведущего моста 13, то блок 16 управления выполнит соединение второго ведущего моста 13 с первым ведущим мостом 11. Для этого блоку 16 управления необходимо только будет включить первый блок сцепления 14. Не будет необходимости в синхронизации главной передачи 22 с ведущими колесами 30, поскольку муфты 23, 24 уже находятся в зацеплении.
Блок 16 управления адаптирует упомянутое выше значение предела пробуксовывания согласно параметру сцепления. Например, предел пробуксовывания будет снижен при скользких дорожных условиях с тем, чтобы выполнить включение первого блока 14 сцепления перед тем, как пробуксовывания достигнет высокого значения.
Включение первого блока 14 сцепления происходит при высоком давлении. Чем более высокое давление приложено к камере активации, тем большим будет крутящий момент, передаваемый на второй ведущий мост 13 и повышающий тяговое усилие транспортного средства подобно заблокированному дифференциалу.
Дополнительно, в режиме работы 6х4 давление активации первого блока сцепления регулируют исходя из пробуксовывании первого ведущего моста 11 и разности скоростей между первым и вторым ведущими мостами 11, 13. Если происходит продолжение увеличения пробуксовывания даже после включения первого блока 14 сцепления, давление активации ступенчато увеличивают до тех пор, пока сцепление с дорогой не будет достигнуто. Если происходит уменьшение пробуксовывания, давление активации уменьшают и впоследствии первый блок 14 сцепления выключают. Более высокое давление обеспечивает более высокий блокирующий крутящий момент первого блока 14 сцепления.
Если блок 16 управления идентифицирует пробуксовывание между колесами моста без механического привода и первым ведущим мостом 11 с постоянным приводом во время активированного нормального режима работы, значение которого больше значения предела пробуксовывания, или если блок 16 управления и регулирования идентифицирует необходимость подключения второго ведущего моста 13, то блок 16 управления выполняет соединение второго ведущего моста 13 с первым ведущим мостом 11. Блок 16 управления вначале выполнит приложение импульсов давления к камере активации с низким давлением активации и, таким образом, выполнит периодическое включение первого блока 14 сцепления. Тем самым блок 16 управления и регулирования вначале синхронизирует главную передачу 22 второго ведущего моста 13 с ведущими колесами 30 второго ведущего моста 13. После успешной синхронизации или после истечения максимального периода времени блок 16 управления и регулирования затем выполняет соединение второго ведущего моста 13 с первым ведущим мостом 11 посредством включения второго блока 15 сцепления и повышения давления активации в камере активации первого блока 14 сцепления.
Блок 16 управления дополнительно содержит термическую модель для адаптации давления активации первого блока 14 сцепления к температуре первого блока 14 сцепления. Блок 16 управления оценивает температуру первого блока 14 сцепления посредством термической модели и соответственно адаптирует давление активации. При достижении некоторого предела температуры первого блока 14 сцепления блок 16 управления выполняет переключение первого блока 14 сцепления в первое рабочее состояние сцепления.
При очень низких скоростях транспортного средства и при запуске блок 16 управления выполняет переключение в преимущественный режим работы 6х4. Включение первого блока 14 сцепления при низкой скорости и высоком крутящем моменте двигателя выравнивает износ шин колес первого и второго ведущих мостов 11, 13. Этот переход в режим работы 6х4 происходит даже тогда, когда пробуксовка ведущих колес не обнаружена с тем, чтобы увеличить срок эксплуатации шин колес первого ведущего моста 11.
Блок 16 управления дополнительно отслеживает температуру масла главной передачи 22 второго ведущего моста 13 и включает первый блок 14 сцепления в случае, когда температура масла опустилась ниже порогового значения температуры. При продолжительной работе в нормальном режиме и при низких значениях окружающей температуры масло в маслосборнике второго моста может перейти в полутвердое состояние. Последующее включение второго блока 15 сцепления при переходе в ждущий режим работы может вызвать резкий импульс крутящего момента в главной передаче 22. В результате периодического включения первого блока сцепления происходит вращение приводной шестерни 27 второй главной передачи 22 и нагревание масла в маслосборнике.
Блок 16 управления дополнительно содержит антипробуксовочный блок 45 для предотвращения пробуксовки ведущих колес 26. Антипробуксовочный блок 45 проверяет пробуксовывание моста между колесами моста без механического привода и ведущими колесами 26 первого ведущего моста 11. Блок 16 управления дополнительно проверяет пробуксовывание ведущих колес между ведущими колесами 26, 30 ведущих мостов 11, 13.
Для определения пробуксовывания моста и пробуксовывания ведущих колес антипробуксовочный блок 45 соединен с подробно не представленной сенсорной системой для ведущих колес 26, 30. Эта сенсорная система определяет скорость соответствующих ведущих колес. Антипробуксовочный блок 45 вычисляет среднее значение скоростей ведущих колес 26, 30, которые приводятся в действие посредством соответствующих ведущих мостов 11, 13, для определения скорости моста.
Антипробуксовочный блок 45 содержит заложенное в нем значение предела пробуксовывания для идентификации состояния пробуксовывания. Антипробуксовочный блок 45 непрерывно сравнивает определенное пробуксовывание моста и пробуксовывание ведущих колес со значением предела пробуксовывания. Когда значение предела пробуксовывания превышено, антипробуксовочный блок 45 идентифицирует состояние пробуксовывания. Если антипробуксовочный блок 45 идентифицирует поворот или разворот механического транспортного средства посредством сравнения определенных скоростей ведущих колес 26, 30 ведущего моста 11, 13, то антипробуксовочный блок 45 смещает значение предела пробуксовывания исходя из различия между ведущими колесами 26, 30.
Антипробуксовочный блок 45 характеризуется функцией управления двигателем и функцией управления тормозами для регулировки пробуксовывания. Функция управления двигателем снижает присутствующее пробуксовывание, в особенности пробуксовывание моста, посредством снижения крутящего момента двигателя. Функция управления тормозами снижает присутствующее пробуксовывание, в частности пробуксовывание ведущих колес между двумя ведущими колесами ведущих мостов 11, 13 посредством применения тормозов или посредством обеспечения тормозящего крутящего момента.
В случае возникновения пробуксовывания на однородной поверхности дороги антипробуксовочный блок 45 активирует функцию управления двигателем. В случае возникновения пробуксовывания на неоднородной поверхности дороги (возникновение пробуксовывания в виду разного коэффициента трения для правого и левого колеса) антипробуксовочный блок 45 активирует функцию управления тормозами.
Значение предела пробуксовывания ведущих колес дополнительно заложено в антипробуксовочном блоке 45. Антипробуксовочный блок 45 активирует значение предела пробуксовывания ведущих колес совместно с активацией функции управления тормозами. В случае наличия пробуксовывания, в особенности между двумя ведущими колесами 26, 30 ведущих мостов 11, 13, превышающего значение предела пробуксовывания ведущих колес, антипробуксовочный блок 45 активирует функцию управления двигателем в дополнение к активной функции управления тормозами.
Для предотвращения перегрева тормозов значения верхнего и нижнего предела скорости заложены в антипробуксовочном блоке 45. Значение нижнего предела скорости соответствует первому рабочему условию 1 7, определенному в качестве значения нижнего предела скорости, а значение верхнего предела скорости соответствует второму рабочему условию 19, определенному в качестве значения верхнего предела скорости. В случае необходимости ниже значения нижнего предела скорости антипробуксовочный блок 45 активирует или функцию управления тормозами, или функцию управления двигателем. В случае необходимости выше значения верхнего предела скорости антипробуксовочный блок 45 активирует только функцию управления двигателем. Значения предела скорости антипробуксовочного блока 45 могут по существу быть выведены из рабочих условий 17, 19.
Блок 16 управления связан с антипробуксовочным блоком 45. В случае если антипробуксовочный блок 45 идентифицирует состояние пробуксовывания, он передает эту информацию блоку 16 управления, после чего блок 16 управления присоединяет второй ведущий мост 13. Таким образом, во время активации функции управления тормозами или функции управления двигателем присутствует состояние пробуксовывания, в результате чего блок 16 управления включает блоки 14, 15 сцепления.
В случае активации функции управления двигателем антипробуксовочным блоком 45 происходит снижение скорости первого ведущего моста 11 посредством снижения крутящего момента двигателя во время активации функции управления двигателем. Вследствие этого происходит адаптация скорости главной передачи 22 к скорости второго ведущего моста 13, который на данный момент отсоединен. Присоединение второго ведущего моста 13 может быть выполнено без проблем, как только разность скоростей будет достаточно мала. Поскольку антипробуксовочный блок 45 главным образом активирует функцию управления двигателем, в случае переключения на нормальный режим работы блок 16 управления выполняет вначале переключение первого блока 14 сцепления и лишь затем муфт 23, 24 блока 15 сцепления.
Ждущий режим работы является главным образом активным при активации функции управления тормозами посредством антипробуксовочного блока 45. Только второй блок 15 сцепления включен в ждущем режиме работы. Таким образом, антипробуксовочный блок 45 регулирует главным образом мгновенное пробуксовывание ведущих колес 26 первого ведущего моста 11 посредством торможения первого ведущего моста 11. Блок 16 управления 5 впоследствии присоединяет второй ведущий мост 13 посредством включения первого блока 14 сцепления. По существу, также возможно, чтобы антипробуксовочный блок 45 управлял мгновенным пробуксовыванием ведущих колес 26 первого ведущего моста 11 посредством совместного торможения первого ведущего моста 11 и второго ведущего моста 13.
Антипробуксовочный блок 45 дезактивирует активную антипробуксовочную функцию или, соответственно, функцию управления двигателем в случае нажатия водителем педали тормоза. Следовательно, блок 44 управления антиблокировкой тормозов характеризуется более высоким приоритетом, чем антипробуксовочный блок 45. При включении блока 44 управления антиблокировкой тормозов блок 44 управления антиблокировкой тормозов отдельно управляет тормозящим крутящим моментом ведущих колес 26, 30, соответственно. В случае если водитель запрашивает тормозящий крутящий момент, который может привести к включению блока 44 управления антиблокировкой тормозов, происходит дезактивация антипробуксовочного блока 45. Во время включения блока управления антиблокировкой тормозов блок 16 управления выключает первый блок 14 сцепления. Рабочее состояние сцепления второго блока сцепления сохраняется. В случае если при запросе тормозящего крутящего момента не происходит включения блока 44 управления антиблокировкой тормозов, блок 16 управления поддерживает рабочее состояние сцепления первого блока 14 сцепления и рабочее состояние сцепления второго блока 15 сцепления. В случае если водитель запрашивает тормозящий крутящий момент, блок 16 управления дезактивирует любое вычисление параметров сцепления с дорогой.
Водитель может активировать компрессионные тормоза двигателя для замедления транспортного средства без применения рабочего тормоза. Блок 16 управления включает первый блок 14 сцепления для переключения в режим работы 6х4, когда компрессионные тормоза двигателя активны. Включение режима работы 6х4 обеспечивает равномерное распределение отрицательного крутящего момента между первым и вторым ведущими мостами 11, 13 для получения равномерного износа шин колес.
На участке дороги с отрицательным уклоном активирование компрессионных тормозов двигателя также может вызвать полное затормаживание колес. В этом случае блок 44 управления антиблокировкой тормозов становится активным и отключает торможение двигателем. Блок 16 управления поддерживает первый блок 14 сцепления во включенном состоянии, когда блок 44 управления антиблокировкой тормозов отключил компрессионное торможение двигателем.
При изменении передачи коробки передач происходит включение блока 43 управления коробкой передач. Блок 16 управления поддерживает рабочее состояние сцепления первого блока 14 сцепления и рабочее состояние сцепления второго блока 15 сцепления во время включения блока 43 управления коробкой передач или во время изменения передачи коробки передач.
В случае, если транспортное средство не оборудовано антипробуксовочной системой, блок 16 управления ограничивает крутящий момент двигателя в определенных неблагоприятных ситуациях. В случае скользкого дорожного покрытия происходит активация режима работы 6x4 для снижения количества пробуксовывания посредством передачи крутящего момента на второй ведущий мост 13. В условиях очень скользкого дорожного покрытия не исключено, что даже после включения режима работы 6x4 пробуксовывание колес будет продолжать увеличиваться. В этих случаях, блок 16 управления ограничит крутящий момент двигателя посредством посылки сигнала блоку 42 управления двигателем. Это возможно только тогда, когда водитель управляет крутящим моментом двигателя, что предполагает отсутствие активного командования управлением крутящим моментом двигателя со стороны других систем. Включение ограничения крутящего момента двигателя происходит при возникновении чрезмерного пробуксовывания первого ведущего моста 11. Когда значение пробуксовывания моста опустится ниже упомянутого выше нижнего порогового значения, крутящий момент двигателя будет восстановлен в соответствие с запросом водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| АВТОМОБИЛЬНОЕ СИЛОВОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2011 |
|
RU2555076C2 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА ПОСЛЕДОВАТЕЛЬНОГО/ПАРАЛЛЕЛЬНОГО ТИПА | 2011 |
|
RU2470800C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2677001C1 |
| ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2530207C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПОТРЕБИТЕЛЯ МОЩНОСТИ, СОЕДИНЕННОГО С СИЛОВЫМ АГРЕГАТОМ | 2020 |
|
RU2793739C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2240934C2 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202479C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА ДЛЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА С ЧЕТЫРЬМЯ ВЕДУЩИМИ КОЛЕСАМИ И СООТВЕТСТВУЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2561881C2 |
Изобретение относится к устройству управления силовой передачей для силовой передачи механического транспортного средства. Устройство управления содержит первый ведущий мост, постоянно приводимый в действие посредством основной силовой передачи, второй ведущий мост, подключаемый к основной силовой передаче посредством вспомогательной силовой передачи, и блок управления. Вспомогательная силовая передача содержит первый блок сцепления и второй блок сцепления, расположенный в трансмиссии ниже по потоку от первого блока сцепления для присоединения второго ведущего моста к основной силовой передаче. Блок управления в одном режиме работы включает при наличии заданного рабочего условия по меньшей мере один второй блок сцепления вспомогательной силовой передачи для переключения в ждущий режим работы и при активном ждущем режиме работы включает первый блок сцепления вспомогательной силовой передачи для присоединения подключаемого второго ведущего моста в зависимости по меньшей мере от одного параметра. Достигается повышение надежности устройства. 2 н. и 12 з.п. ф-лы, 2 ил.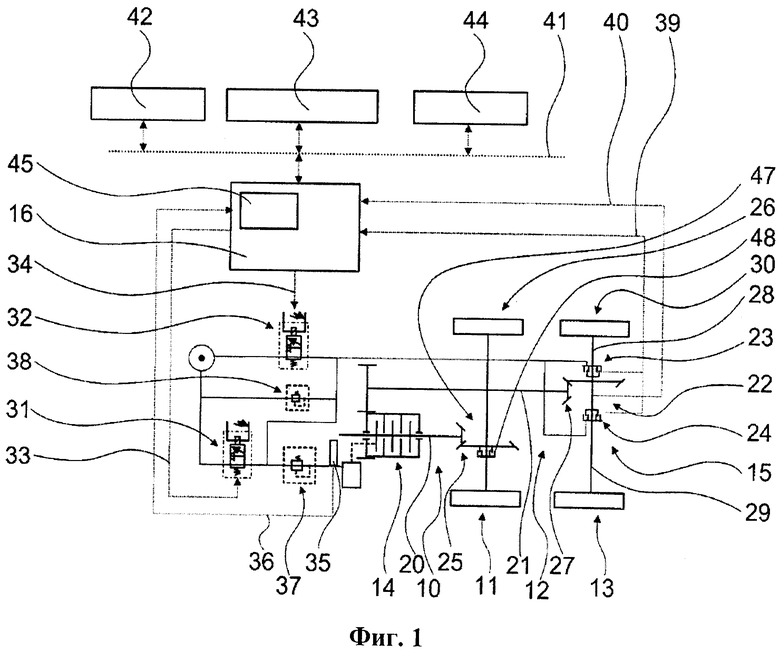
1. Устройство управления силовой передачей для силовой передачи механического транспортного средства, содержащее по меньшей мере одну основную силовую передачу (10), первый ведущий мост (11), постоянно присоединенный посредством основной силовой передачи (10), по меньшей мере одну вспомогательную силовую передачу (12) и второй ведущий мост (13), подключаемый к основной силовой передаче (10) посредством вспомогательной силовой передачи (12), причем указанная вспомогательная силовая передача (12) содержит по меньшей мере один первый блок (14) сцепления и по меньшей мере один второй блок (15) сцепления, расположенный в трансмиссии ниже по потоку от первого блока (14) сцепления, и блок (16) управления, который по меньшей мере в одном режиме работы
- устанавливает при наличии заданного рабочего условия (17) ждущий режим работы, в котором по меньшей мере один второй блок (15) сцепления вспомогательной силовой передачи (12) включен, а первый блок (14) сцепления выключен, и
- начиная от ждущего режима работы, присоединяет в случае необходимости подключаемый второй ведущий мост в зависимости по меньшей мере от одного параметра (18) посредством включения первого блока (14) сцепления вспомогательной силовой передачи (12) и устанавливает посредством этого режим работы 6x4.
2. Устройство по п.1, отличающееся тем, что блок (16) управления, начиная от ждущего режима работы, выполняет переключение в нормальный режим работы при наличии дополнительного рабочего условия (19) посредством выключения по меньшей мере одного второго блока (15) сцепления.
3. Устройство по п.1 или 2, отличающееся тем, что блок (16) управления, начиная от нормального режима работы, синхронизирует по меньшей мере один второй блок (15) сцепления посредством периодического включения первого блока (14) сцепления для переключения в ждущий режим работы.
4. Устройство по п.1, отличающееся тем, что блок (16) управления предотвращает переключение блоков (14, 15) сцепления в течение заданного интервала времени.
5. Устройство по п.1, отличающееся тем, что блок (16) управления определяет рабочее условие (17) для установления ждущего режима работы и рабочее условие (19) для переключения в нормальный режим работы в зависимости от одного и того же параметра (18).
6. Устройство по п.5, отличающееся тем, что силовая передача механического транспортного средства содержит по меньшей мере один мост без механического привода и блок (16) управления определяет параметр (18) посредством моста без механического привода.
7. Устройство по п.5, отличающееся тем, что рабочее условие (17) для переключения в ждущий режим работы и рабочее условие (19) для переключения в нормальный режим работы заданы при помощи двух различных значений предела скорости.
8. Устройство по п.1, отличающееся тем, что режим работы 6х4 установлен, когда скорость транспортного средства ниже третьего значения предела скорости.
9. Устройство по п.1, отличающееся тем, что блок (16) управления адаптирует по меньшей мере одно из условий для изменения режима работы согласно параметру сцепления по меньшей мере в одном рабочем состоянии.
10. Устройство по п.1, отличающееся тем, что блок (16) управления отслеживает температуру масла главной передачи (22) второго ведущего моста (13) и включает первый блок (14) сцепления, когда температура масла опускается ниже порогового значения температуры.
11. Устройство по п.1, отличающееся тем, что блок (16) управления включает режим работы 6х4 при активации компрессионных тормозов двигателя.
12. Устройство по п.1, отличающееся тем, что блок (16) управления присоединяет приводной вал (20) основной силовой передачи (10) к приводному валу (21) вспомогательной силовой передачи (12) по меньшей мере в одном рабочем состоянии посредством первого блока (14) сцепления.
13. Устройство по п.1, отличающееся тем, что вспомогательная силовая передача (12) содержит по меньшей мере одну главную передачу (22), а второй блок (15) сцепления содержит по меньшей мере две муфты (23, 24), расположенные в трансмиссии после главной передачи (22), и блок (16) управления одновременно выключает две муфты (23, 24) второго блока (15) сцепления для переключения в нормальный режим работы.
14. Способ управления силовой передачей механического транспортного средства, содержащей по меньшей мере одну основную силовую передачу (10), первый ведущий мост (11), постоянно присоединенный с приведением в действие посредством основной силовой передачи (10), по меньшей мере одну вспомогательную силовую передачу (12) и второй ведущий мост (13), подключаемый к основной силовой передаче (10) посредством вспомогательной силовой передачи (12), причем указанная вспомогательная силовая передача (12) содержит по меньшей мере один первый блок (14) сцепления и по меньшей мере один второй блок (15) сцепления, расположенный в трансмиссии ниже по потоку от первого блока (14) сцепления, причем способ предусматривает по меньшей мере следующие стадии:
- включение по меньшей мере одного второго блока (15) сцепления вспомогательной силовой передачи (12) при наличии заданного рабочего условия (17) для установления ждущего режима работы и
- начиная от ждущего режима работы, присоединение с приведением в действие подключаемого второго ведущего моста, в случае необходимости, посредством включения по меньшей мере одного блока сцепления (14) вспомогательной силовой передачи (12) по желанию в зависимости по меньшей мере от одного параметра (18) для установления режима работы 6x4.
| DE 102006045007 A1, 21.02.2008 | |||
| DE 102008015224 A1, 19.03.2009 | |||
| Система автоматического управления приводом ведущих колес многоосного транспортного средства | 1978 |
|
SU706262A1 |
| Многоосное транспортное средство | 1979 |
|
SU856870A1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |

