Изобретение относится к устройству для приведения в действие управляемого элемента, например, редуктора или системы передачи крутящего момента в приводной цепи автомобиля, с приводным узлом и функционально соединенным с ним посредством приводного соединения выходным элементом и с по меньшей мере одним энергоаккумулятором, посредством которого достигается прямое или косвенное силовое воздействие на выходной элемент.
Такие устройства для приведения в действие известны из патента DE-OS 19504847. В этих устройствах для систем передачи крутящего момента предложена конструкция, в которой предусмотрен энергоаккумулятор для силовой поддержки, выполненный по принципу прямолинейного воздействия, в связи с чем имеет место прямолинейная зависимость между перемещением устройства для приведения в действие и силой.
Задача рассматриваемого изобретения состоит в том, чтобы создать вышеупомянутое устройство для приведения в действие, которое обеспечивает модулированный (например, по пути) характер изменения силы, действующей на выходной элемент и создающей силовую поддержку приводного двигателя по меньшей мере в одном рабочем направлении. Кроме того, в основу изобретения положена задача создать вышеупомянутое устройство, которое может быть выполнено более выгодным образом с точки зрения габаритов, стоимости и расхода материалов. Задачей изобретения является также создание устройства, обладающего улучшенной функциональностью.
Согласно изобретению это достигается в вышеупомянутых устройствах для приведения в действие тем, что к приводному соединению присоединен воспринимающий силу элемент с пространственным геометрическим контуром, например с криволинейным профилем или с криволинейным диском или с кулачком, и на выходной элемент через пространственный геометрический контур указанного элемента передается силовое воздействие по меньшей мере одного энергоаккумулятора.
Далее, согласно изобретению в устройстве для приведения в действие управляемого элемента, например для переключения или выбора передаточного отношения редуктора или для приведения в действие системы передачи крутящего момента в приводной цепи автомобиля, в состав которого входит приводной узел, в случае надобности редуктор, а также функционально соединенный с ними посредством приводного соединения выходной элемент с по меньшей мере одним, воздействующим на выходной элемент энергоаккумулятором, целесообразно в приводном соединении между приводным узлом и выходным элементом установить воспринимающий силу элемент с пространственным геометрическим контуром, например с криволинейным диском, криволинейным профилем и (или) кулачком, и силовое воздействие по меньшей мере одного энергоаккумулятора передается на выходной элемент через пространственный геометрический контур.
Далее целесообразно предусмотреть, чтобы на воспринимающий силу элемент с пространственным геометрическим контуром, например с криволинейным диском, криволинейным профилем или с кулачком, в зоне пространственного геометрического контура воздействовал по меньшей мере один энергоаккумулятор, в результате чего передача силы происходит от энергоаккумулятора на выходной элемент через пространственный геометрический контур.
В другом исполнении изобретения целесообразно предусматривается, что воспринимающий силу элемент с пространственным геометрическим контуром, например с криволинейным диском, криволинейным профилем или кулачком, представляет собой элемент, который при воздействии приводимого в действие управляющего элемента приходит в движение.
В устройстве для приведения в действие целесообразно предусмотреть, чтобы при силовом воздействии на воспринимающий силу контур и при движении элемента с воспринимающим силу контуром происходило модулирование силы воздействия энергоаккумулятора на выходной элемент.
Далее целесообразно предусмотреть, чтобы элемент с воспринимающим силу контуром при воздействии управляющего элемента совершал движение по меньшей мере в одном направлении.
Точно также целесообразно предусмотреть, чтобы элемент с воспринимающим силу контуром передвигался прямолинейно и (или) в осевом, и (или) в радиальном направлении, и (или) в окружном направлении.
Согласно другому варианту изобретения целесообразно предусмотреть, чтобы пространственный геометрический воспринимающий силу контур элемента был ориентирован прямолинейно и (или) в осевом, и (или) в радиальном направлении, и (или) в окружном направлении.
Согласно другому примеру исполнения изобретения целесообразно предусмотреть, чтобы силовое воздействие от по меньшей мере одного энергоаккумулятора на пространственный геометрический воспринимающий силу контур элемента был ориентирован в основном прямолинейно и (или) в осевом, и (или) в радиальном направлении, и (или) в окружном направлении.
Далее целесообоазно предусмотреть, чтобы модуляция воспринимающего силу пространственного геометрического контура элемента была ориентирована в основном прямолинейно и (или) в осевом, и (или) в радиальном направлении, и (или) в направлении окружном.
Целесообразно предусмотреть, чтобы при силовом воздействии на контур, например по меньшей мере одним энергоаккумулятором сила действовала по меньшей мере в основном в направлении на выходной элемент или в противоположном направлении.
Далее целесообразно предусмотреть, чтобы при силовом воздействии на контур например по меньшей мере одним энергоаккумулятором происходило разделение силового действия по меньшей мере в основном в направлении движения приведения в действие выходного элемента и (или) в направлении, перпендикулярном к движению приведения в действие.
Целесообразно также предусмотреть, чтобы в приводное соединение между приводным узлом и выходным элементом был встроен редуктор.
Целесообразным является исполнение, при котором пространственный геометрический элемент с воспринимающим силу контуром находится в функциональном соединении с приводным узлом, элементом приводного соединения и выходным элементом.
Далее целесообразным является исполнение, при котором элемент с пространственным геометрическим воспринимающим силу контуром имеет вращающийся криволинейный диск, криволинейную поверхность или кулачок одномерной или двухмерной формы. Далее целесообразным является исполнение, при котором элемент с пространственным геометрическим воспринимающим силу контуром имеет передвигаемый прямолинейно или в осевом направлении криволинейный диск, криволинейную поверхность или кулачок одномерной или двухмерной формы.
Согласно изобретению целесообразным является исполнение, при котором элемент с пространственным геометрическим воспринимающим силу контуром имеет криволинейный диск, криволинейный профиль или кулачок трехмерной формы.
Целесообразным является также исполнение, при котором по меньшей мере один энергоаккумулятор, оказывающий силовое воздействие на пространственный геометрический контур, имеет опорный башмак, ролик и (или) подшипник качения, через который энергоаккумулятор опирается на этот контур.
Далее целесообразно выполнить изобретение в таком виде, при котором по меньшей мере один энергоаккумулятор воздействует на некоторый элемент, например рычаг, который на одном участке смонтирован подвижно, а на втором участке имеет опорный башмак, ролик или подшипник качения, воздействующий на контур пространственного геометрического элемента.
Далее целесообразным является исполнение, при котором по меньшей мере один энергоаккумулятор воздействует на элемент, который опирается в прямолинейных направляющих и имеет контур пространственного геометрического элемента.
При этом далее целесообразным является исполнение, при котором по меньшей мере один энергоаккумулятор воздействует на клещеобразный элемент, который на одном участке смонтирован подвижно и воздействует на контур пространственного геометрического элемента.
Целесообразно исполнение, при котором по меньшей мере один энергоаккумулятор воздействует на элемент с пространственным геометрическим контуром, например на опорном участке в виде эксцентрично расположенной цапфы, причем выходной элемент опирается на участок пространственного геометрического контура.
Целесообразно также исполнение, при котором по меньшей мере один энергоаккумулятор воздействует на элемент с пространственным геометрическим контуром, например на опорном участке в виде эксцентрично расположенной цапфы, причем элемент, воздействующий на выходной элемент, опирается на участок пространственного геометрического контура.
Далее целесообразно исполнение, при котором опирание на пространственный геометрический контур и (или) воздействие на пространственный геометрический контур происходит путем скольжения, качения или через ролик.
Согласно изобретению целесообразно выполнить приводной узел в виде электродвигателя, электромагнитного или электромеханического устройства.
Целесообразно также выполнить приводной узел в виде устройства, приводимого в действие напорной средой, например в виде гидравлического, гидропневматического или пневматического устройства.
Далее, целесообразно исполнение, при котором на выходной элемент устройства для приведения в действие в результате движения пространственного геометрического контура и приложения силы к этому контуру силовое воздействие на выходной элемент модулируется в функции пути приведения в действие выходного элемента.
Целесообразно также исполнение, при котором силовая поддержка происходит по меньшей мере на части пути приведения в действие выходного элемента.
При другом варианте исполнения изобретения целесообразно предусмотреть, чтобы во время движения для приведения в действие силовая поддержка в случае надобности изменяла знак своего направления.
Согласно другому варианту исполнения изобретения в устройстве для приведения в действие управляемого элемента, например для переключения и (или) выбора передаточного отношения редуктора и (или) для приведения в действие системы передачи крутящего момента в приводной цепи автомобиля, в состав которого входит приводной узел и в случае надобности редуктор, а также функционально соединенный с ними посредством приводного соединения выходной элемент для приведения в действие, с по меньшей мере одним воздействующим на выходной элемент энергоаккумулятором, целесообразно предусмотреть, чтобы на выходной элемент оказывал силовое воздействие по меньшей мере один энергоаккумулятор, причем по меньшей мере один энергоаккумулятор выполнен в виде пружины с отходом от мертвой точки.
При этом особенно целесообразно исполнение, в котором один против другого установлены два энергоаккумулятора, которые воздействуют на выходной элемент в виде пружин с отходом от мертвой точки.
Целесообразно также предусмотреть, чтобы по меньшей мере один энергоаккумулятор был выполнен в виде пружины с отходом от мертвой точки таким образом, что первый концевой участок шарнирно присоединен к выходному элементу, а второй концевой участок шарнирно присоединен, например, к корпусу.
При другом исполнении изобретения целесообразно предусмотреть, чтобы для управления приводимым в действие управляющим элементом, например для переключения и (или) выбора передаточного отношения редуктора и (или) для приведения в действие системы передачи крутящего момента в приводной цепи автомобиля, в состав которого входит приводной узел и в случае надобности редуктор, а также функционально соединенный с ними через приводное соединение выходной элемент для приведения в действие, с по меньшей мере двумя воздействующими на выходной элемент энергоаккумуляторами, по меньшей мере два энергоаккумулятора действовали на выходной элемент так, что они установлены в ряд один за другим.
Далее целесообразно предусмотреть, что по меньшей мере один энергоаккумулятор имеет предварительное натяжение.
Далее целесообразно предусмотреть, что по меньшей мере один энергоаккумулятор является пружиной, например пружиной сжатия, листовой пружиной, петлевой пружиной или упругим элементом из металла, резинового материала или пластмассы.
Целесообразно также выполнить элемент с контуром пространственной формы из металла или пластмассы.
Целесообразно также выполнить элемент с пространственным геометрическим контуром за одно целое с деталью редуктора.
Целесообразно также выполнить элемент с пространственным геометрическим контуром за одно целое с выходным элементом.
В варианте изобретения целесообразно выполнить элемент с контуром пространственной формы за одно целое с элементом функционального соединения между приводным узлом и выходным элементом.
Далее целесообразно элемент с контуром пространственной формы соединить с элементом соединительного звена между приводным узлом и выходным элементом.
Примеры исполнения изобретения подробнее объясняются ниже при помощи чертежей. В частности, показаны:
на фиг.1 - устройство для приведения в действие,
на фиг.2 - устройство для приведения в действие,
на фиг.3 - устройство для приведения в действие,
на фиг.4 - компенсационное устройство,
на фиг.4а - компенсационное устройство,
на фиг.4b - компенсационное устройство,
на фиг.5а - компенсационное устройство,
на фиг.5b - компенсационное устройство,
на фиг.6а - компенсационное устройство,
на фиг.6b - компенсационное устройство,
на фиг.6с - компенсационное устройство,
на фиг.7а - компенсационное устройство,
на фиг.7b - компенсационное устройство,
на фиг.8а - компенсационное устройство,
на фиг.8b - компенсационное устройство,
на фиг.9 - устройство для приведения в действие,
на фиг.10 - криволинейный диск,
на фиг.11 - криволинейный диск,
на фиг.12 - график,
на фиг.13 - график,
на фиг.14 - часть устройства для приведения в действие,
на фиг.14а - расположение энергоаккумуляторов,
на фиг.14b - расположение энергоаккумуляторов,
на фиг.15а - расположение энергоаккумуляторов,
на фиг.15b - расположение энергоаккумуляторов,
на фиг.16 - устройство для приведения в действие,
на фиг.17 - устройство для приведения в действие.
На фиг.1 показано устройство 1 для автоматизированного приведения в действие например системы 2 передачи крутящего момента и (или) для автоматизированного переключения передаточного отношения редуктора в приводной цепи автомобиля с приводным двигателем, системой передачи крутящего момента и редуктором. С помощью этого устройства можно автоматизированным образом посредством управляющего узла включать или выключать систему передачи крутящего момента или целенаправленно управлять крутящим моментом, передаваемым системой передачи крутящего момента. Редуктор может иметь ручное или автоматическое переключение, причем в автоматически переключаемом редукторе посредством этого устройства можно целенаправленно вводить, менять или выводить передаточные ступени редуктора. Ступенями редуктора можно в зависимости от кинематики устройства управлять в цикле постепенного нарастания или уменьшения в любой последовательности.
Устройство 1 для автоматизированного приведения в действие системы передачи крутящего момента и (или) редуктора имеет приводной узел 3, который может быть выполнен например в виде электродвигателя. Приводной узел устройства для приведения в действие может быть также выполнен в виде электромагнитного устройства или устройства, приводимого в действие напорной средой, например гидравлического или пневматического устройства.
В примере исполнения согласно фиг.1 показан корпус 4 устройства 1 для приведения в действие, в который вставлен электродвигатель 3, причем выходной вал 5 опирается в подшипниках 6, 6а и 7. Электродвигатель 3 может быть также насажен снаружи на корпус 4, причем в этом случае выходной вал 5 входит в корпус через отверстие в корпусе 4. Полюсный статор 3а электродвигателя 3 присоединен к корпусу 4 устройства, например при помощи винтов, заклепок или вставного монтажа. В этом случае выходной вал входит например в корпус, образуя приводное соединение.
За выходным валом двигателя может быть установлен редуктор, при помощи которого можно преобразовывать движение привода, например вращение выходного вала электродвигателя, в другую форму движения. В примере исполнения согласно фиг.1 показана установленная за валом червячная передача, а также расположенный после нее кривошипно-шатунный механизм.
На участке между двумя подшипниками 6 и 7 на выходном валу 5 целесообразно посадить червяк, который по крайней мере в основном соединен с валом 5 неподвижно. На фиг.1 этот червяк не изображен, но образует часть червячной передачи. Червяк находится в зацеплении с червячным колесом 8.
Вместо червячной передачи могут быть применены и другие виды передач, например планетарная, цилиндрическая зубчатая, коническая зубчатая передача, передача с ходовым винтом и т.п.
Червяк приводит в движение червячное колесо 8, которое вращается вокруг оси 9. Далее через цапфу 10 с червячным колесом соединен шатун 11, который воздействует на поршень 12 задающего цилиндра устройства для приведения в действие.
Шатун 11 может находиться в приводном соединении с_ поршнем 12 задающего цилиндра, работающего под действием напорной среды, в данном случае гидроцилиндра 13, и путем осевого перемещения поршня 12 управлять осевым положением поршня 14 принимающего цилиндра, работающего под действием напорной среды, в данном случае принимающего гидроцилиндра 15. Напорная линия 12, 13, 14 может быть выполнена в виде гидравлической или пневматической линии воздействия.
Соединение между шатуном 11 и поршнем 12 задающего цилиндра может быть выполнено при помощи соединительного звена 16, представляющего собой род шарового шарнира или универсального шарнира и выполненного таким образом, что при сборке стыковка облегчается посредством защелки.
Выходная часть 17 принимающего гидроцилиндра служит выходной частью рассматриваемого устройства для приведения в действие, причем в данном примере исполнения она воздействует на вилку 18 выключения сцепления, в результате чего можно настроить или привести в действие подшипник 19 муфты выключения сцепления, чтобы целенаправленно включить или выключить муфту, или чтобы настроить заданный передаваемый крутящий момент.
Система 2 передачи крутящего момента изображена в виде фрикционной муфты с нажимным диском 20, диском сцепления 21 и тарельчатой (диафрагменной) пружиной 22, которая смонтирована на маховике 23; крышка муфты обозначена номером 24. Подшипник 19 выключения сцепления при своем осевом перемещении передвигает тарельчатую пружину 22, в результате чего муфта включается или выключается. Фрикционная муфта может быть самонастраивающейся, компенсирующей износ муфтой. Кроме того, система передачи крутящего момента может представлять собой пластинчатую муфту, муфту блокирования гидротрансформатора и т.п. Фрикционная муфта может быть выполнена в виде сухой муфты или муфты, работающей в масле.
Редуктор автомобиля может быть выполнен с ручным или с автоматическим переключением. В качестве автоматического редуктора может быть применен редуктор со ступенчатым переключением или бесступенчато настраиваемый редуктор, например бесступенчато настраиваемый редуктор с коническими дисками.
Рассматриваемое устройство для приведения в действие может быть применено для включения и (или) выключения системы передачи крутящего момента или для изменения передаточного отношения одного из вышеупомянутых редукторов.
Приведение муфты в действие при помощи вилки 18 выключения сцепления происходит против действия силы тарельчатой пружины 22 в качестве энергоаккумулятора. Средством выключения может быть например и центральный рычаг выключения.
Внутри устройства 1 для приведения в действие находится по меньшей мере один энергоаккумулятор 25, который одним своим концом опирается на деталь 26, опирающуюся в свою очередь на часть 27 корпуса, тогда как другой конец энергоаккумулятора опирается на деталь 28, которая в осевом направлении закреплена посредством предохранительного кольца 29 на шатуне 11. Благодаря такому выполнению энергоаккумулятора может быть достигнута силовая поддержка энергоаккумулятором шатуна, приводимого в действие приводным узлом. Сила, создаваемая энергоаккумулятором 25, действует против энергоаккумулятора муфты или в том же направлении, что и он. Направление силового воздействия энергоаккумулятора 25 на шатун или на выходной элемент можно модулировать по пути приведения в действие.
Энергоаккумулятор 25 расположен в основном соосно с шатуном 11 и поддерживает движение шатуна 11 в направлении выключения и (или) включения системы передачи крутящего момента. Выбрав надлежащим образом предварительное натяжение энергоаккумулятора 25, например винтовой пружины сжатия, можно достигнуть того, что этот энергоаккумулятор на части пути движения детали 11 создает силу, которая способствует процессу выключения, а на остальной части осевого перемещения создает силу, противодействующую процессу выключения. Таким образом можно предусмотреть изменение направления воздействия силы на шатун.
Далее устройство 1 для приведения в действие содержит пространственный геометрический элемент 40, имеющий или несущий криволинейный профиль и соединенный для передачи вращения с червячным колесом 8. Соединение элемента 30 с червячным колесом 8 может быть выполнено путем запрессовки, обеспечивающей передачу крутящего момента, или при помощи винтов или заклепок. Можно также выполнить элемент 30 за одно целое с червячным колесом 8. Целесообразно изготовить червячное колесо методом литья под давлением из пластмассы, выполняя элемент 30 с его криволинейным профилем за одно целое путем обработки давлением или подпрессовывая его к червячному колесу. Однако эта деталь может быть изготовлена и из металла.
К элементу 30, несущему криволинейный профиль, прикладывают силу, чтобы через криволинейный профиль передать ее на выходной элемент устройства для приведения в действие. Модуляцией криволинейного профиля можно модулировать силовое воздействие в функции пути или движения во время приведения в действие. Энергоаккумулятор 50 оказывает силовое воздействие на криволинейный профиль непосредственно или косвенно, например через рычаг с роликом.
Криволинейный профиль разделяет действующую на него силу на составляющую в направлении движения и составляющую в направлении, перпендикулярном к направлению движения, причем составляющая в направлении движения создает силовую поддержку или силовую компенсацию.
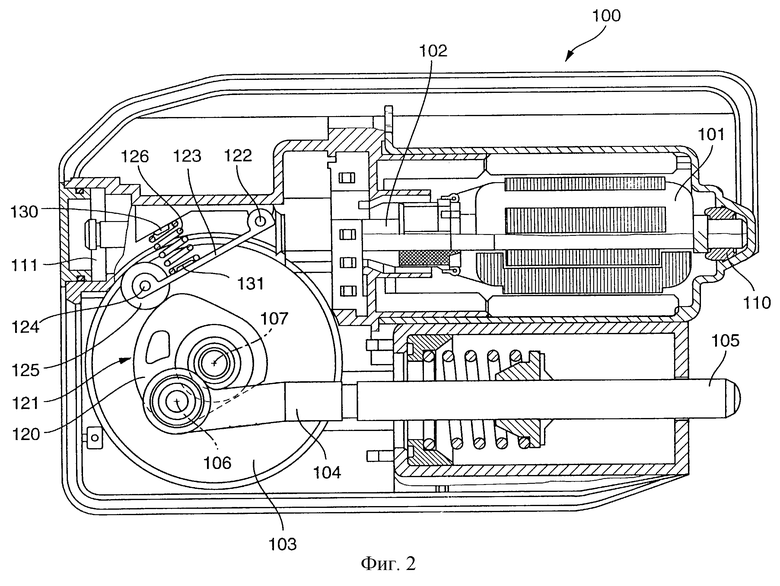
На фиг. 2 показано устройство 100 для приведения в действие с приводным узлом 101, например электродвигателем, с выходным валом 102 и с расположенным за валом редуктором, например червячной передачей, червяк которой на фиг. 2 не показан. Червяк находится в зацеплении с червячным колесом 103, которое через шатун 104 перемещает выходной элемент 105. Шатун 104 опирается в подшипнике на участке 106, а червячное колесо опирается в подшипнике на участке 107. Вал 102 двигателя опирается в подшипниках 110 и 111.
С червячным колесом 103 соединен для передачи вращения пространственный геометрический элемент 120, имеющий контур 121 в виде например криволинейного профиля или криволинейного диска. На участке 122 посажен с возможностью поворота рычажный элемент 123, причем на участке 124 элемента 123 находится вращающийся ролик 125. Энергоаккумулятор 126 загружает рычажный элемент 123 таким образом, что ролик 125 нажимает на контур или профиль 121 элемента 120. Энергоаккумулятор опирается на выступающие элементы 130 и 131 таким образом, что не может с них выскользнуть, причем они выполнены таким образом, что заходят в центральные осевые отверстия энергоаккумулятора, в данном случае пружины сжатия. Благодаря такому монтажу энергоаккумулятор установлен в основном надежно во избежание сдвига и утери.
Силовое воздействие, создаваемое энергоаккумулятором 126 и передаваемое через рычаг 123 и ролик 125 на контур 121, разделяется в точке контакта согласно обычному параллелограмму сил на составляющую, которая действует в радиальном направлении, и составляющую, которая действует в окружном направлении. Силовая составляющая в радиальном направлении действует центрально на ось 107. Силовая составляющая в окружном направлении вызывает силовое воздействие на шатун 104 и тем самым на выходной элемент 105. Достигаемую благодаря этому силовую поддержку или силовую компенсацию силы приведения в действие, действующей на выходной элемент 105, можно модулировать в функции движения криволинейным профилем 121 пространственного элемента 120, например криволинейным диском или кулачком.
Силовые составляющие в радиальном и окружном направлении соответствуют воздействию на вращающийся криволинейный диск. В общем случае действующая на криволинейный профиль сила разделяется на составляющую, в основном параллельную направлению движения или приведения в действие, и составляющую, которая действует в основном перпендикулярно к направлению движения или приведения в действие.
Управляя при помощи кривой линии силовым воздействием или компенсацией компенсационной пружины, можно получить в основном нужный характер изменения компенсационной силы или компенсационного момента, зависящий в основном от конкретного применения.
В примере, изображенном на фиг.2, показана закрепленная в корпусе пружина 126, которая прямо или косвенно через рычаг 123 воздействует на криволинейный профиль 121 на червячном колесе 103. Когда изменяется расстояние от места контакта пружины с криволинейным профилем до оси вращения 107 червячного колеса, изменяется момент в окружном направлении. Криволинейный профиль можно сделать таким, что этот действующий момент противодействует моменту, вызванному силой приведения в действие выходного элемента 105 или поддерживает его. При помощи компенсационной пружины, управляемой кривой линией, можно путем модуляции профиля кривой ограничить в случае необходимости компенсационное воздействие отдельными участками настраиваемого пути перемещения, причем это можно осуществить так, что при повороте криволинейного профиля 121 задается изменение радиуса этого профиля только на части угла поворота. На других участках угла поворота можно предусмотреть неизменный радиус.
Формой криволинейного профиля можно обеспечить целенаправленную модуляцию силы, которая воздействует или прилагается в направлении движения для приведения в действие. При этом силовое воздействие можно например настроить так, чтобы оно на всем пути приведения в действие действовало в одном направлении или по меньшей мере один раз меняло свой знак, т.е. направление. Можно также модулировать значение действующей силы в функции пути приведения в действие.
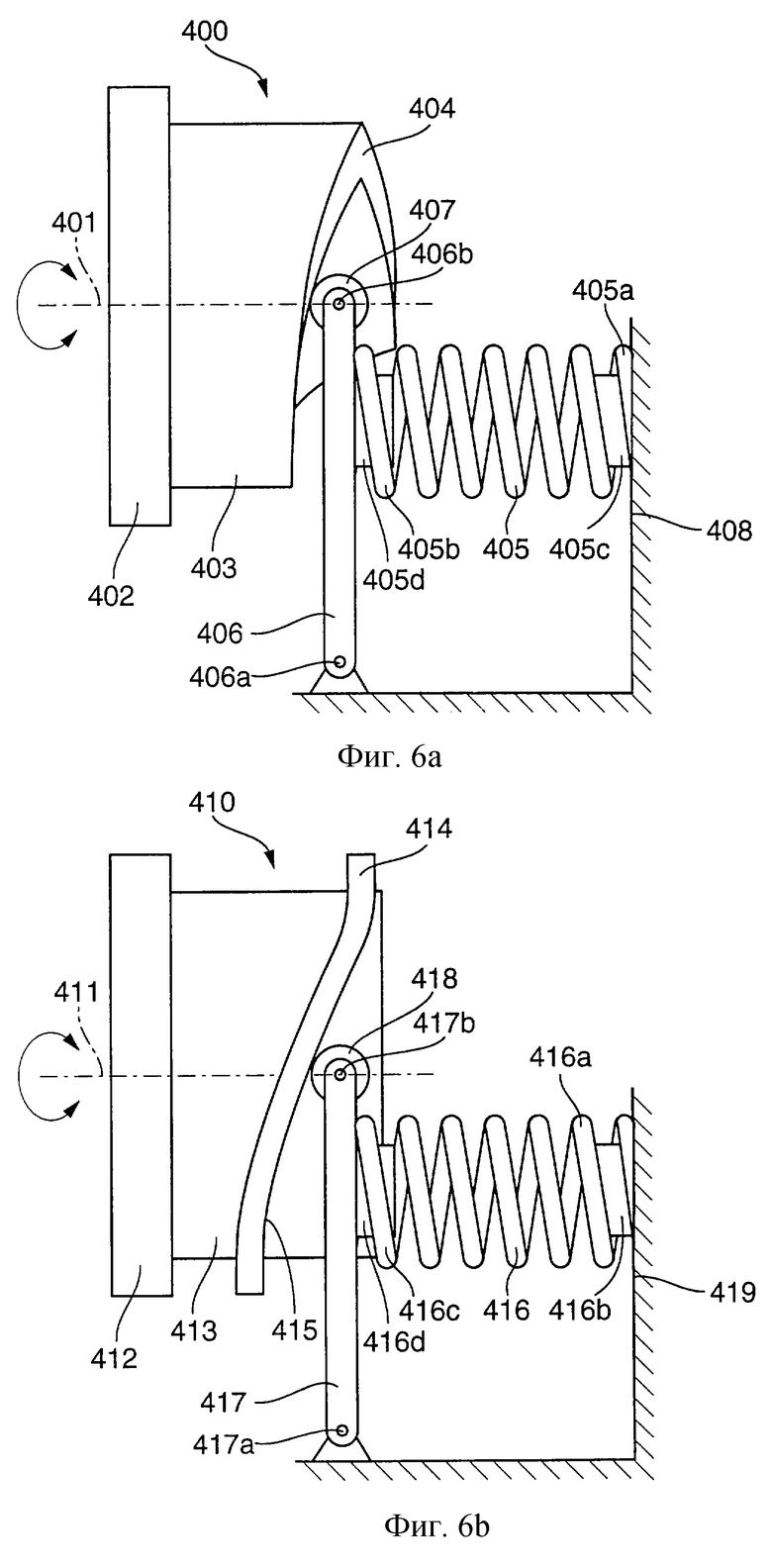
Под пространственным геометрическим контуром, например с криволинейным диском или криволинейным профилем, или с модулированной поверхностью, соединенной с криволинейным диском или кулачком, можно например понимать поверхность 121 согласно фиг.2. Эта поверхность имеет компоненты в осевом направлении и в окружном направлении, причем модуляция поверхности или криволинейного профиля производится путем модуляции радиуса как функции угла поворота. Сила прилагается в основном в радиальном направлении и разделяется на окружную и радиальную составляющие. Окружная составляющая сила воздействия энергоаккумулятора на поверхность вызывает при этом целесообразную силовую поддержку привода. Столь же целесообразным является исполнение согласно фиг. 6а и 6b, когда поверхность имеет компоненты в окружном и радиальном направлении и создает модуляцию в осевом направлении в функции угла поворота, благодаря чему действующая в осевом направлении сила в результате разделения на составляющие имеет составляющую в окружном и в осевом направлении, причем окружная составляющая служит для поддержки привода. Сказанное выше является целесообразным для приводов с элементами, совершающими круговое движение. В устройствах с прямолинейным движением элементов, например в устройстве согласно фиг.4-5b, целесообразно предусматривать, чтобы поверхность с пространственным геометрическим контуром, например с криволинейным профилем или с криволинейным диском или с кулачком, имела компоненты в радиальном и в осевом направлении, причем модуляция поверхности выполняется таким образом, что модулируется расстояние или радиус от оси движения в функции компоненты в осевом направлении. Благодаря этому получается силовое воздействие например на систему тяг и рычагов в направлении движения, причем разделение силы на составляющие происходит под действием поверхности криволинейного профиля.
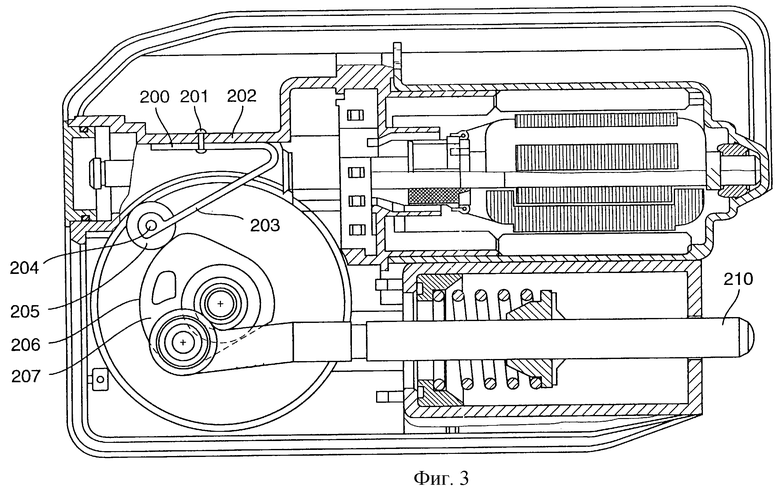
На фиг. 3 показан пример исполнения согласно фиг.2, причем энергоаккумулятор 200 выполнен в виде листовой пружины, закрепленной на корпусе 202 посредством закрепительных средств 201. На полке 203 энергоаккумулятора 200 в подшипнике 204 посажен вращающийся ролик 205, причем энергоаккумулятор 200 прижимает ролик 205 к криволинейному профилю 206 пространственного геометрического элемента 207. Криволинейная траектория или криволинейный профиль контура 206 элемента 207 модулирован в радиальном направлении в функции поворота элемента 207 в окружном направлении. Благодаря этому можно достигнуть силовой модуляции, которая приводит к силовой поддержке или к силовой компенсации выходного элемента 210.
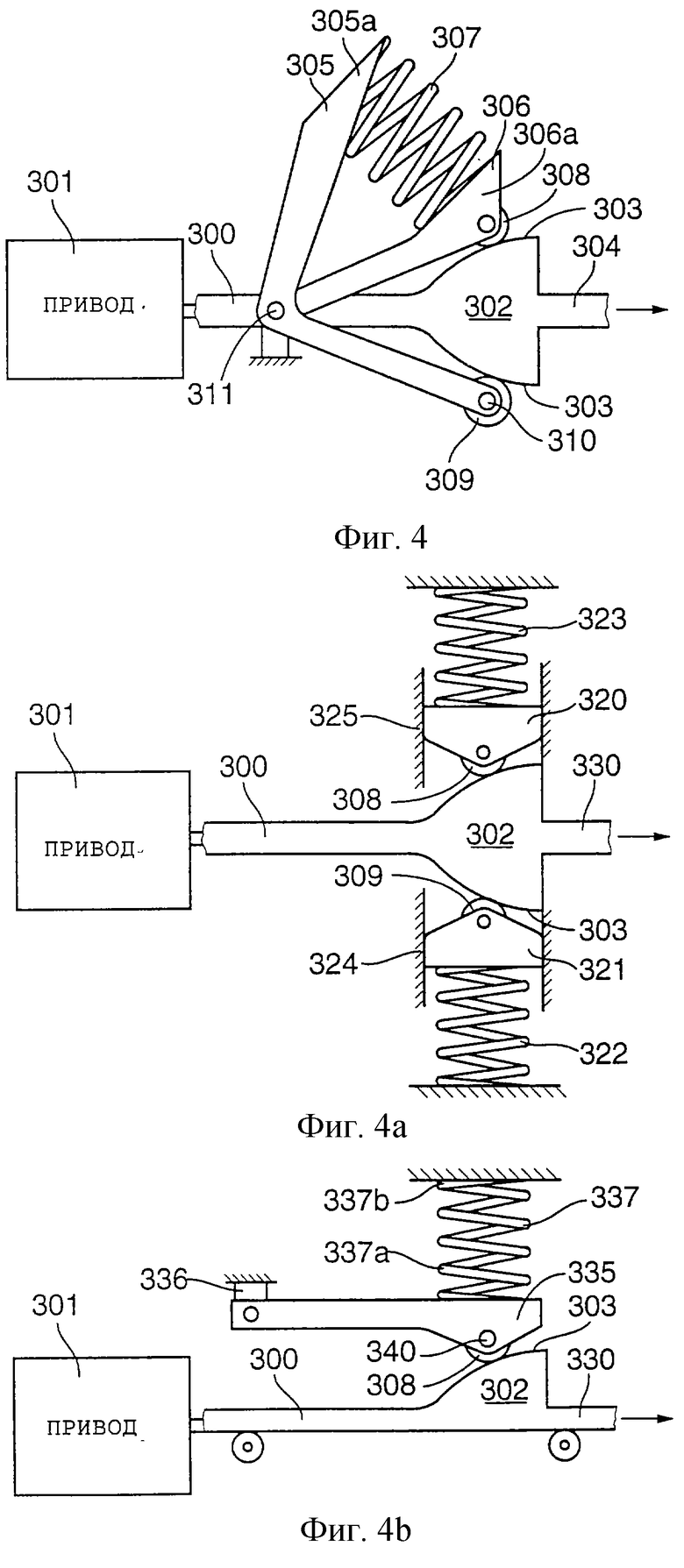
На фиг.4 показана часть устройства силовой компенсации в устройстве для приведения в действие, в котором силовое воздействие передается от энергоаккумулятора через криволинейный профиль на выходной элемент. Устройство для силовой компенсации может вызывать силовую компенсацию или силовую поддержку выходного элемента в зависимости от направления приложенной силы.
Устройство силовой компенсации имеет передвигаемый в осевом направлении элемент 300, который приводится в движение приводным узлом 301, например электродвигателем и редуктором. Передвигаемый в осевом направлении элемент 300 имеет на участке 302 контур или криволинейный профиль 303, который в осевом направлении имеет модулированную поверхность, радиус или расстояние. Далее элемент 304 соединен с приводимым в действие элементом, причем силовая поддержка элемента 302 служит силовой поддержкой для приводимого в действие элемента. Силовое воздействие на модулированнный участок 303 производится таким образом, что первый угловой рычаг 305 опирается с возможностью качания на участке 311, а второй рычаг 306 на том же участке 311, причем между приемными участками 305а и 306а установлен энергоаккумулятор 307, который нагружает приемные участки 305а и 306а на сжатие.
На участке 306а смонтирован вращающийся ролик 308. На концевом участке рычага 305 на участке подшипника 310 смонтирован еще один вращающийся ролик 309. При силовом воздействии энергоаккумулятора 307 на участки 305а и 306а ролики 308 и 309 прижимаются к модулированной поверхности 303 элемента 302, благодаря чему энергоаккумулятор производит поддерживающее воздействие на элемент 302 или 304. Через криволинейную поверхность или модуляцию участка 302, 303 достигается поддержка или компенсация силы, необходимой для приведения исполнительного органа в действие.
На фиг.4а схематически изображен привод 301, который передвигает например через редуктор элемент 300. Элемент 300 имеет участок 302, снабженный криволинейной поверхностью или криволинейным профилем 303. На криволинейный профиль воздействует ролик 308, 309, который смонтирован с возможностью вращения в передней части опорного башмака 320, 321. Энергоаккумуляторы 322, 323 примыкают одним концом к опорным башмакам, а вторым концом опираются в корпусе. Опорные башмаки 320, 321 смонтированы с возможностью скольжения в направляющих 324, 325. Через ролики 308, 309 сила передается от энергоаккумуляторов на криволинейный профиль 303, в результате чего происходит силовое воздействие на элемент 302 и выходную часть 330 элемента 300. Путем модуляции криволинейного профиля 303 в функции осевой протяженности элемента 300 достигается зависящее от пути силовое воздействие на элемент 303.
На фиг. 4b показан другой вариант исполнения, в котором привод 303 например при помощи электродвигателя и редуктора приводит в действие элемент 300, который на участке 302 снабжен криволинейным профилем 303. Далее элемент 300 имеет на выходной стороне участок 330, который воздействует на элемент, осуществляющий управление системой передачи крутящего момента или редуктора. Воздействие на криволинейный профиль 303 элемента 302 производится через рычаг 335, смонтированный с возможностью качания на участке 336, который неподвижно закреплен в корпусе. На рычаг 335 действует энергоаккумулятор 337, который одним своим концом 337а примыкает к рычагу, а вторым концом 337b прикреплен к корпусу. В результате силового воздействия ролик 308, смонтированный с возможностью вращения на участке 340, прижимается к криволинейному профилю 303, в результате чего силовое воздействие передается от энергоаккумулятора через рычаг и ролик на криволинейный профиль и выходной элемент 330.
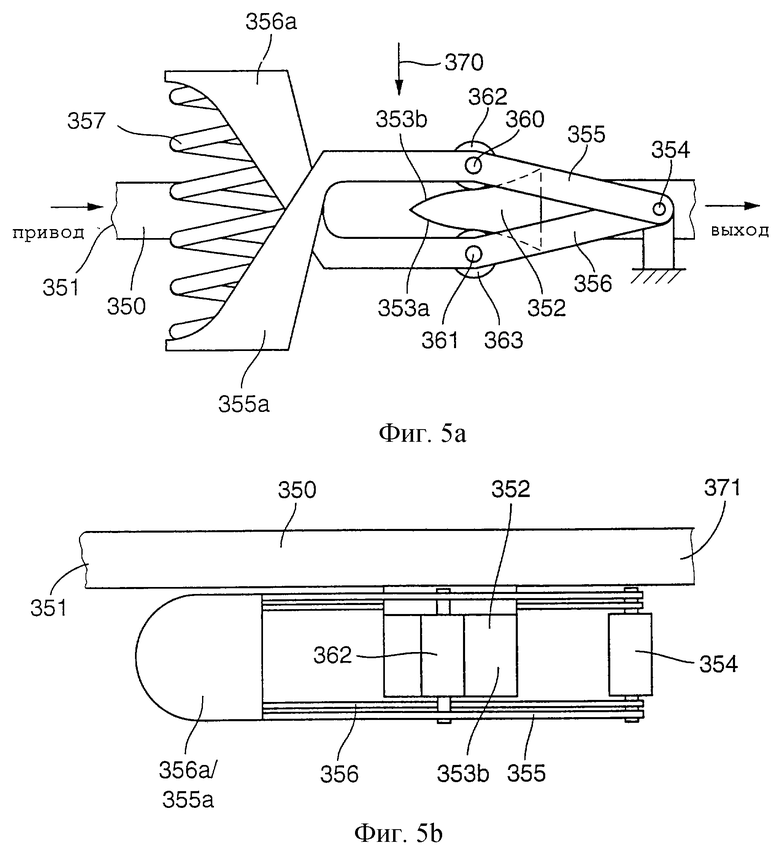
На фиг. 5а показан элемент 350, который перемещается в осевом направлении, а на участке 351 управляется и приводится в движение приводным узлом. С элементом 350 соединен элемент 352, выполненный с ним за одно целое или закрепленный на нем. Элемент 352 имеет модулированную контактную поверхность 353а, 353b. На участке 354, представляющем собой ось вращения, смонтированы с возможностью качания или поворота рычаги 355 и 356, которые имеют участки 355а и 356а для установки в них энергоаккумулятора 357, который раздвигает элементы 355 и 356 друг от друга. На участках 360 и 361 смонтированы ролики 362 и 363, между которыми находится элемент 352. Ролики 362 и 363 перекатываются по контуру 353а, 353b, причем под действием энергоаккумулятора, раздвигающего рычаги, ролики нажимают на контур 353а, 353b, воздействуя таким образом на элемент 352. В результате силовое действие передается от энергоаккумулятора 357 через рычаги и ролики на криволинейную поверхность 353а, 353b, а от нее на элемент 352 и далее на элемент 350.
На фиг. 5 показано исполнение согласно фиг.5а в виде по стрелке 370 на фиг. 5а. Виден элемент 350, на участок 351 которого действует привод и который на участке 371 воздействует на приводимый в действие элемент. Показаны участки 326а, 355а, а также рычаги 355 и 356. Далее видны ролики 360, воздействующие на поверхность 353 и элемент 352.
На фиг. 6а показана часть устройства для приведения в действие системы передачи крутящего момента или редуктора (400), причем в устройстве имеется элемент 402, который может под действием привода вращаться вокруг оси 401. Элемент 402 может представлять собой например червячное колесо 8 из фиг.1 или другой приводимый в движение элемент, например зубчатое колесо. К приводимому в движение элементу 402 присоединен элемент 403, несущий криволинейный профиль 404, который тоже соединен прямо с элементом 402. Криволинейный профиль 404 элемента 403 модулирован в осевом направлении, для чего в окружном направлении варьируется осевая координата модулированной поверхности 404.
Энергоаккумулятор 405 на одном своем конце 405а закреплен в корпусе, для чего цапфа 405с вставлена в отверстие энергоаккумулятора, удерживая пружину на месте. Конец 405b энергоаккумулятора участком 405d соединен с рычагом 406, благодаря чему силовое воздействие энергоаккумулятора 405 передается через рычаг 406 и ролик 407 на криволинейную поверхность или криволинейный диск 404, а оттуда на выходной элемент 402. Рычаг 406 опирается на участке 406а в подшипнике, а на участке 406b смонтирован с возможностью вращения ролик 407. Силовое воздействие энергоаккумулятора 405 передается через рычаг 406 и ролик 407 на криволинейный профиль 404 в основном в осевом направлении, причем силовое воздействие на элемент 402 происходит в окружном направлении. Тем самым исполнение согласно фиг.6а создает поддерживающую силу, которая действует в окружном направлении относительно оси 401.
На фиг. 6b показан далее узел 410 для силовой поддержки или силовой компенсации в устройстве для приведения в действие системы передачи крутящего момента или редуктора, причем элемент 412 смонтирован с возможностью вращения вокруг оси 411 и может быть приведен в движение и повернут например при помощи приводного узла. Элемент 412 может быть выполнен например в виде червячного колеса, как он показан например на фиг.1, где обозначен номером 8. Элемент 413 соединен с элементом 412 или выполнен с ним за одно целое, причем элемент 413 представляет собой в основном цилиндрическую деталь, которая на своей наружной периферии имеет криволинейный профиль, например модулированный в осевом направлении выступ. Криволинейный профиль 414 может быть выполнен за одно целое с цилиндрическим элементом 413. Энергоаккумулятор 416 одним своим концом 416а закреплен на фиксирующей цапфе 416b корпуса 419, а другим своим концом 416с посредством фиксирующей цапфы 416d смонтирован на рычаге. Рычаг 417 опирается на участке 417а с возможностью качаний, а на участке 417b посажен ролик 418, который на участке криволинейной поверхности 415 криволинейного профиля 414 опирается в осевом направлении, перенося силовое воздействие энергоаккумулятора на элемент 402. Силовое воздействие энергоаккумулятора 416 происходит в осевом направлении, а при помощи криволинейного профиля преобразуется в воздействие в окружном направлении элемента 412.
На фиг. 6с показан элемент силовой компенсации или силовой редукции или силовой поддержки в устройстве для приведения в действие системы передачи крутящего момента или редуктора, причем элемент 432 смонтирован на оси 431 и приводится во вращение посредством приводного узла. Цилиндрический в основном корпус 433 соединен с элементом 432 или выполнен за одно целое с ним и несет криволинейный профиль 434. Энергоаккумулятор 435 посредством фиксирующего стержня 439 соединен своим концом 435а с корпусом, а на участке 435b воздействует на толкатель 436, который передвигается прямолинейно вдоль направляющих 438а и 438b. Толкатель 436 имеет на своем наружном осевом конце ролик или скользящий участок, который контактирует с криволинейной поверхностью 434 элемента 433, чтобы переносить силовую поддержку от энергоаккумулятора 435 на элемент 432. Направляющие 438а и 438b могут быть выполнены скользящими или на подшипниках качения.
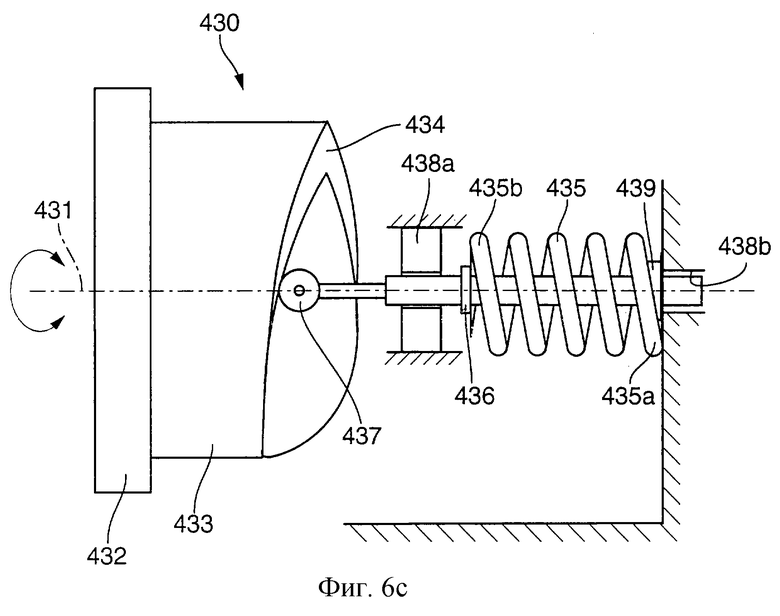
На фиг.7а показан элемент 500, который смонтирован с возможностью вращения относительно оси 501 и при помощи вала 502 может быть приведен в движение от приводного элемента или промежуточного редуктора. Периферийный участок 503 элемента 500 модулирован в радиальном направлении, благодаря чему этот участок в виде криволинейного диска может осуществлять модулированное управление. Цапфа 504 с осью 505 прикреплена к элементу 500, причем во время вращения элемента 500 цапфа 504 движется по круговой траектории 506. Энергоаккумулятор 507 прикреплен посредством фиксирующего стержня 508 к корпусу, причем фиксирующий стержень 508 вставлен в отверстие на концевом участке 507а, препятствуя сдвигу или выпучиванию энергоаккумулятора. На концевом участке 507b энергоаккумулятор удерживается фиксирующим стержнем 509, имеющим ушки 510а и 510b, которые обеспечивают возможность покачивания фиксирующего элемента 509 относительно цапфы 504. При монтаже энергоаккумулятора таким образом, что на него может действовать растягивающая и сдвигающая нагрузка и сам он тоже может создавать такую нагрузку, можно через цапфу передавать на элемент 500 силовую поддержку, осуществляя силовое воздействие со сменой направления силы и с модуляцией значения силы. Выходной элемент 511 выполнен в виде толкателя, который на своем концевом участке 511а имеет вращающийся ролик 512, упирающийся в периферию 503 элемента 500. Путем зависящей от угла поворота модуляции силы воздействия энергоаккумулятора на элемент 500 и зависящей от угла поворота радиусной модуляции элемента 500 можно получить силовую компенсацию или модуляцию силового воздействия на элемент 511.
В исполнении согласно фиг.7а, 7b показан вариант управляемой посредством криволинейного контура компенсационной пружины и пружины с отходом от мертвой точки или через мертвую точку на толкателе. В этом варианте предусматривается, что, во-первых, на вращающемся диске эксцентрично закреплена пружина, которая ввиду первоначального натяжения может создавать момент относительно оси вращения диска, а кроме того может приводить в действие муфту путем контакта с криволинейным профилем на диске. В этом случае можно, придав криволинейному профилю надлежащую форму, оптимальным образом согласовать характер изменения силы выключения сцепления с характером изменения силы компенсационной пружины. Компенсационная сила может на широком участке воздействия иметь такой характер изменения, который очень близко соответствует характеру изменения силы выключения муфты. Сила выключения создает действующий на криволинейный диск момент. Связь между этими двумя величинами можно, пренебрегая для простоты трением, описать следующим образом:
где МLast есть создаваемый силой выключения момент,
r - расстояние от точки приложения силы к криволинейному диску до толкателя для приведения муфты в действие, а ϕ - угол поворота криволинейного диска. Изменение расстояния r соответствует изменениям пути приведения в действие 
Если при приведении муфты в действие возникает противодействующая сила, из компенсационной пружины на вращающемся диске освобождается энергия. При обратном воздействии, т. е. при движениях толкателя в направлении действия силы, энергия, освободившаяся из пружины муфты, может быть снова введена в пружину, что может приводить к разгрузке приводного элемента, например электродвигателя.
В качестве дальнейшего усовершенствования на периферии криволинейного диска можно также предусмотреть участки 520, предназначенные для защелкивания, когда ролик толкателя попадает в такой участок 520, который делает необходимым приложение повышенной силы для выхода из этого участка.
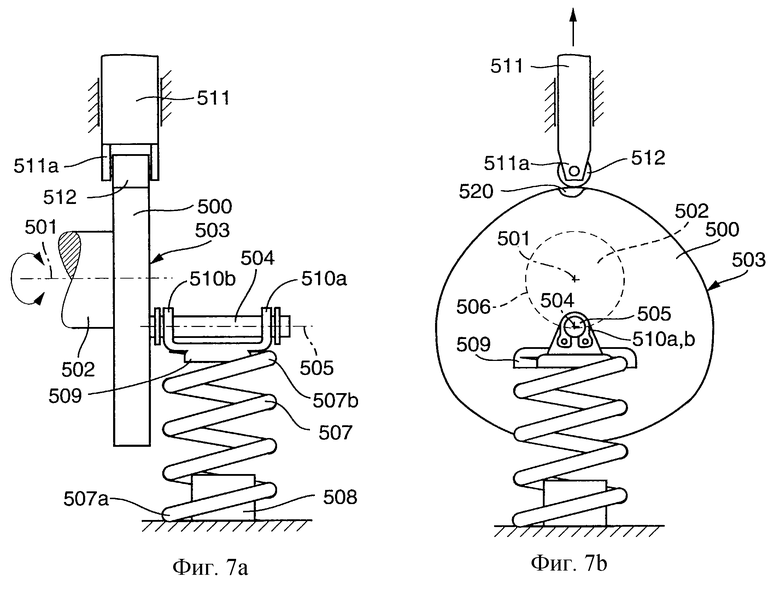
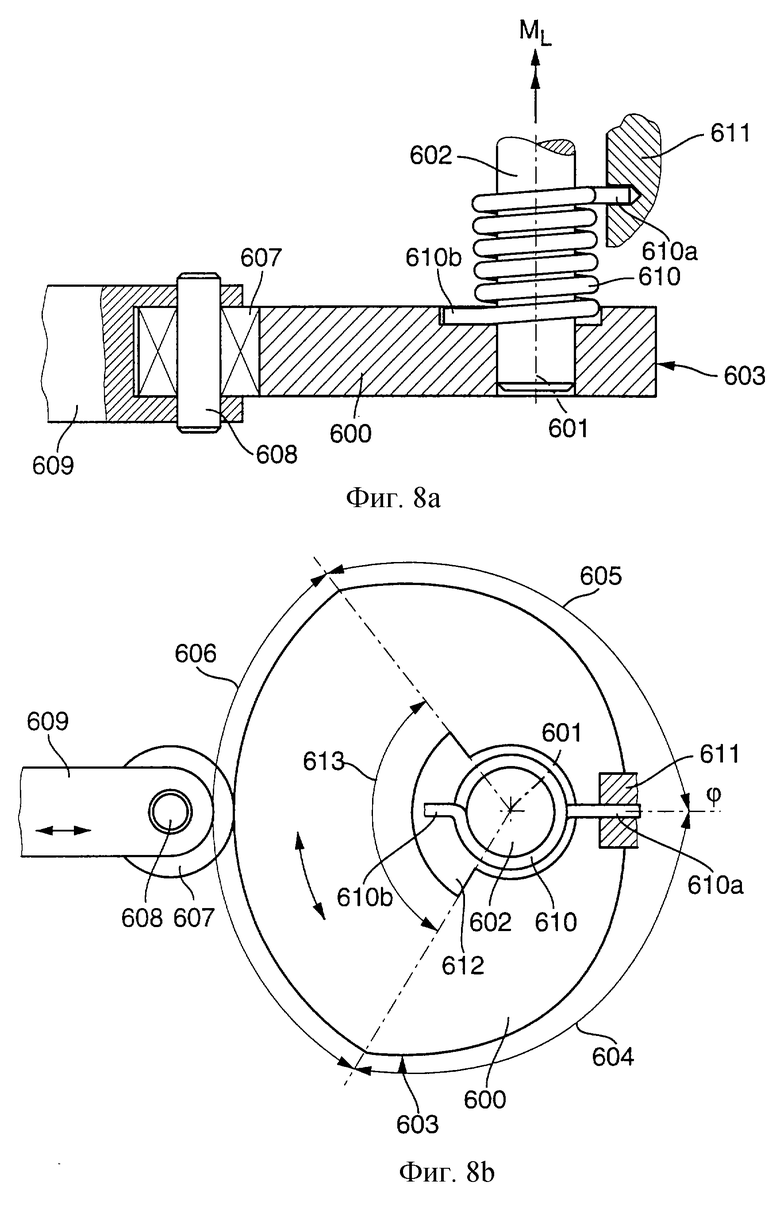
На фиг. 8а показан узел силовой компенсации или поддержки в устройстве для приведения в действие системы передачи крутящего момента и (или) редуктора, причем элемент 600 в основном дисковой формы смонтирован с возможностью вращения относительно оси 601. Элемент 600 приводится во вращательное движение приводным валом, например соединительным звеном 602, которое вызывает целенаправленное вращение элемента 600. Периферия элемента 600 выполнена в виде модулированного в радиальном направлении криволинейного диска, который в пределах первого углового участка 604 и второго углового участка 605 имеет изменяющийся в зависимости от угла поворота радиус, а в пределах в данном случае углового участка 606 имеет постоянный радиус.
В периферию 603, имеющую форму криволинейного диска, упирается ролик 607, смонтированный в подшипнике 608 на участке толкателя, причем от элемента 602 через элемент 600 и ролик 607 приводится в действие толкатель 609. В результате поворота элемента 600 и модуляции радиуса происходит осевое перемещение элемента 609 для приведения в действие системы передачи крутящего момента и (или) для выбора или переключения редуктора.
Для силовой поддержки энергоаккумулятор в виде петлевой пружины смонтирован таким образом, что конец 610а пружины закреплен в корпусе, например путем ввода в фиксирующий участок корпуса 611. Другой конец пружины 610b соединен с элементом 600 путем геометрического замыкания. Геометрическое замыкание выполнено таким образом, что происходит в каждом положении или повороте элемента 600 или же что имеется угол свободного хода, в котором на энергоаккумулятор при повороте элемента 600 не оказывается никакого воздействия. Участок 612, показанный на фиг.8b, выполняет роль такого участка свободного хода, т. е. углубление 612, в которое входит конец 610b пружины 610, оказывает силовое воздействие на пружину только после прохождения некоторого свободного угла. Этот угловой участок 613 соответствует например тому угловому участку, на протяжении которого радиусная модуляция отсутствует, т. е. угол 613 соответствует на фиг.8b угловому участку 606.
Устройство согласно фиг. 8а и 8b может быть применено например для силовой компенсации посредством компенсационной пружины для приведения в действие муфты при помощи криволинейного диска, который приводится в движение например электродвигательным исполнительным механизмом. Это целесообразно при автоматизации процесса переключения муфты и приведения в действие редуктора двумя электродвигательными исполнительными механизмами. При этом один исполнительный механизм выполняет частичные функции сцепления и переключения, а второй - частичную функцию выбора. Могут быть также осуществлены и другие виды разделения функций сцепления, переключения и выбора редуктора, причем процесс выбора способа приведения редуктора в действие происходит между
переключательными зонами, а процесс переключения - внутри этих зон. Для удобного выключения и включения системы передачи крутящего момента желательно иметь возможность быстро размыкать автоматизированную муфту и целенаправленным образом замыкать ее с тем, чтобы размыкание муфты можно было осуществить в зависимости от рабочего состояния быстрее или медленнее, а замыкание тоже быстрее или медленнее в зависимости от рабочего состояния автомобиля или эксплуатационных параметров.
Нагрузка на исполнительный механизм при размыкании муфты является как правило наибольшей, поскольку при замыкании освобождается энергия, накопленная в пружине выключения муфты. Пружина выключения муфты, например в муфте с тарельчатой (диафрагменной) пружиной, является тарельчатой (диафрагменной). Поскольку время приведения в действие возрастает с увеличением нагрузки на исполнительный механизм, целесообразно предусмотреть при размыкании муфты поддержку исполнительного механизма посредством дополнительного энергоаккумулятора.
При помощи электродвигательного исполнительного механизма, например для функций сцепления и переключения, можно например посредством самотормозящегося редуктора приводить в движение криволинейный диск, разделенный на три участка.
На первом участке, например на угловом участке 605, муфта разомкнута, на втором (например, 606) она продолжает быть разомкнутой, а на третьем (например, 604) муфта снова замыкается. Для криволинейного диска с линейно возрастающим или понижающим ходом или с возрастающим или понижающим ходом в соответствии с иной целенаправленно выбранной функцией угла поворота или пути требуется приводной момент, пропорциональный характеристике муфты. В сочетании с линейно действующей компенсационной пружиной нагрузочный момент при размыкании муфты сначала отрицателен. Такая линейно действующая компенсационная пружина для управления системой передачи крутящего момента показана например на фиг.1, где обозначена номером 25. Ввиду наличия самотормозящегося редуктора исполнительного механизма пружина не может разогнать этот механизм достаточно сильно, вследствие чего исполнительный механизм в данном случае может работать без нагрузки или в основном без нагрузки. На втором участке криволинейного диска, под действием которого исполнительный механизм осуществляет переключение, муфта остается разомкнутой. При этом компенсационная пружина проходит свой участок свободного хода без нагружения. На третьем участке, в пределах которого муфта замкнута, энергия, накопленная в пружине выключения муфты, освобождается, вследствие чего сначала нагрузочный момент является отрицательным. Ввиду самоторможения исполнительного механизма или его редуктора исполнительный механизм в этом случае действует в основном без нагрузки. На протяжении примерно 2/3 пути выключения сила приведения в действие близка к нулю. На этом участке муфта работает часто, чтобы управлять передаваемым моментом, что имеет место например в различных рабочих состояниях, в частности при включении или выключении или после процессов переключения или в ситуациях управления со "слежением за моментом".
В данном случае под "слежением за моментом" понимается управление системой передачи крутящего момента, обеспечиваемого приводным двигателем, за вычетом момента, потребляемого другими системами, например системой конденционирования.
Поскольку на таком участке приведение в действие происходит почти без приложения силы, исполнительный механизм может передавать на муфту момент с малой затратой энергии. Однако при помощи криволинейного профиля 603 на диске 600 могут быть реализованы и другие характеристики приведения в действие. Вплоть до полного замыкания муфты исполнительный механизм должен работать против компенсационной пружины до тех пор, пока она снова не будет натянута. Криволинейный диск может быть также выполнен с криволинейным профилем на периферии или на торце цилиндра. Вместо криволинейного диска можно также применить любой вид редуктора для получения неравномерного движения с фазами стопорения и движения. Компенсационная пружина может быть закреплена в корпусе с упором в криволинейный диск, но также и на криволинейном диске с упором в корпус.
Применение крутильной пружины, например петлевой, которая при размыкании и замыкании муфты взаимодействует с криволинейным диском, является целесообразным исполнением изобретения. При замыкании муфты компенсационная пружина заряжается, а энергия, накопленная в пружине выключения, преобразуется в предварительное натяжение компенсационной пружины. При размыкании муфты компенсационная пружина должна сжимать или воздействовать на исполнительный механизм - пружину выключения сцепления. На том участке угла поворота криволинейного диска, на котором исполнительный механизм производит переключение или например осуществляет процесс выбора, муфта остается разомкнутой, компенсационная пружина расслаблена и не прикладывает силу к ведомому звену.
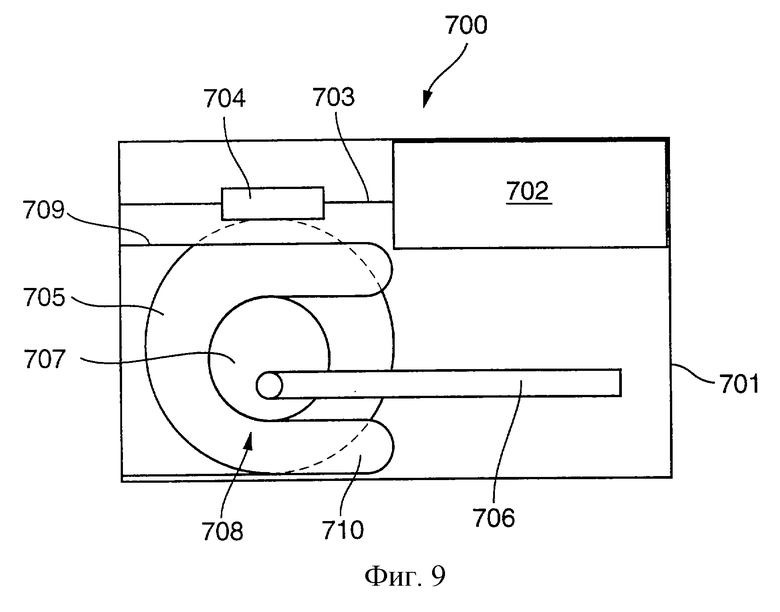
На фиг.9 схематически показан исполнительный механизм 701, в котором установлен или снаружи прифланцован приводной узел 702, например электродвигатель. Выходной вал 703 двигателя соединен червяком 704 с червячным колесом 705, чтобы приводить в действие выходной элемент 706, например толкатель или шатун. Для силовой компенсации к червячному колесу прикреплен криволинейный диск 707 с модулированной поверхностью 708, причем на диск 707 воздействует силой по меньшей мере один энергоаккумулятор 709, 710. Путем модулирования криволинейного диска или поверхности 708 достигается модуляция силы, с которой энергоаккумулятор воздействует на выходной элемент 706.
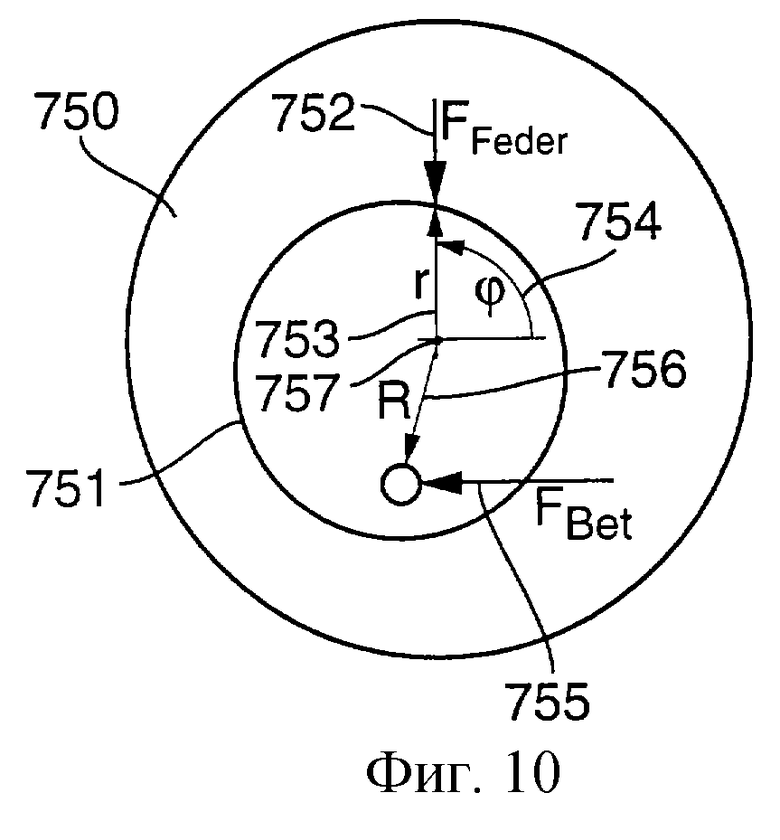
На фиг.10 то же содержание иллюстрируется более наглядно, причем круглый контур 750 изображает наружную поверхность червячного колеса 705. Контур 751 соответствует контуру криволинейного диска 708.
Стрелка 752 изображает силовое воздействие энергоаккумулятора, воздействующего на криволинейный диск 751. Радиyс r 753 характеризует расстояние от центра червячного колеса 750, угол ϕ 754 характеризует угол поворота. Стрелке 755 соответствует сила приведения в действие, воздействующая на выходной элемент, а радиус R 756 соответствует расстоянию от точки приложения силы приведения в действие до оси вращения 757. Следовательно, компенсационное действие компенсационной пружины, которая действует по стрелке 752 на криволинейный диск, выражается формулой:
Mkomp = dr/dϕ*Ffeder.
В качестве варианта исполнения энергоаккумулятор, прикладывающий силу 752, может быть выполнен в виде изгибной пружины, листовой пружины или воздействующей через рычаг пружины.
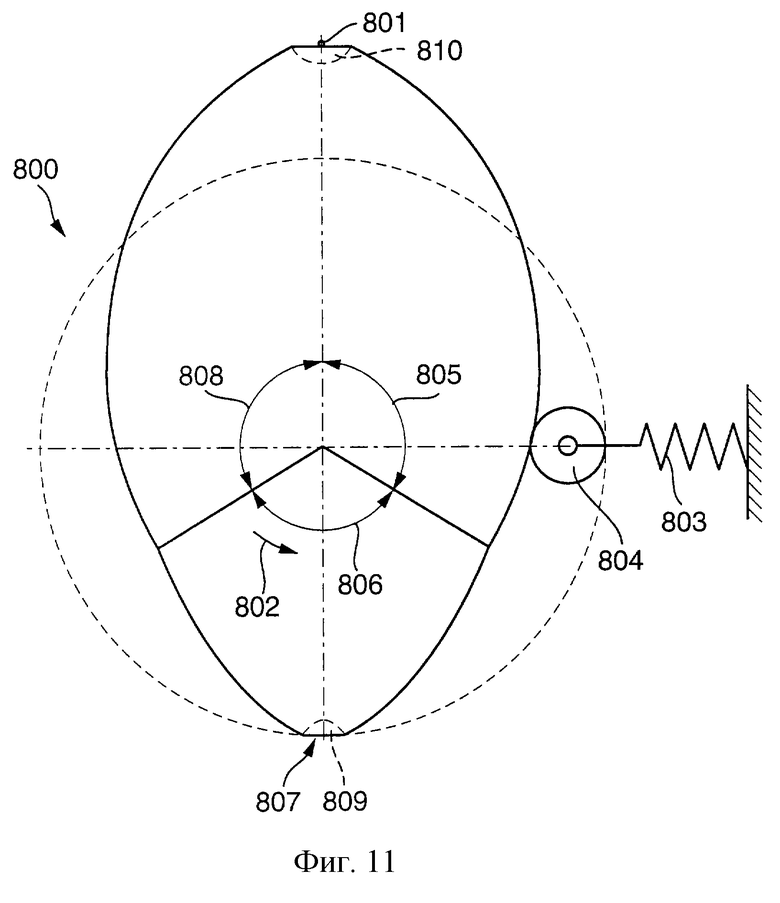
На фиг. 11 показано исполнение криволинейного диска 800, примененное в исполнительном механизме для комбинированного приведения в действие муфты и редуктора. При повороте на 360o происходит процесс расцепления, процесс переключения и процесс включения муфты. Начиная с точки 801, в которой муфта замкнута, криволинейный диск автоматически приводится в действие в направлении стрелки 802, чтобы достигнуть модуляции силы в функции пути или угла приведения в действие. К началу приведения в действие при замкнутой муфте энергоаккумулятор 803 заходит роликом 804 в участок 801 и воздействует на криволинейный диск.
На угловом участке 805 муфта выключается, на угловом участке 806 происходит процесс переключения, причем в первой половине углового участка выводится ступень передачи, в точке 807 достигается нейтральное положение, а во второй половине углового участка 806 вводится другая ступень передачи прежде, чем на угловом участке 808 муфта снова будет включена. Выемка 809 и 810 может быть применена для фиксации нейтрального участка или замкнутой муфты.
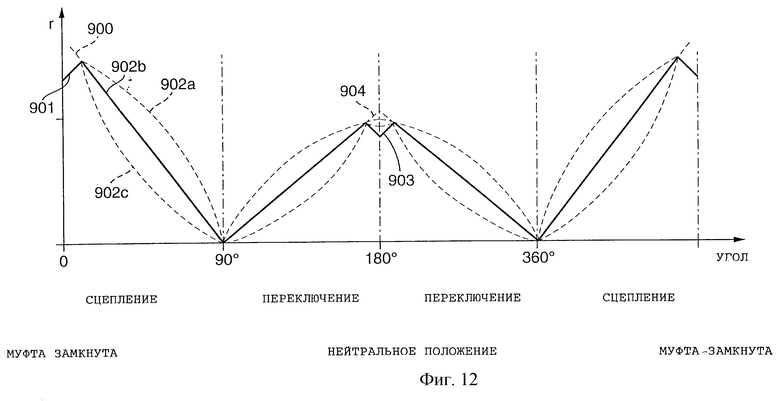
На фиг.12 показана модуляция радиуса R в функции угла криволинейного радиуса согласно фиг.11. При угле 0o радиус является максимальным или в основном максимальным, причем согласно кривой 900 и 901 имеет место максимум или минимум в зависимости от фиксации. На участке от угла 0o до угла 90o модуляция радиуса может происходить согласно кривым 902а, 902b или 902с, причем при 90o достигается минимум. На участке от 90o до 180o модуляция радиуса снова возрастает, причем переход на участке 180o может пройти через минимальное фиксирующее положение 903 или через максимум 904 прежде, чем в угловом участке 270o будет достигнут минимум. На участке от 270o до 360o модуляция радиуса снова возрастает. На участке от 0o до 90o происходит процесс воздействия на муфту, причем при 0o муфта замкнута, а при в основном 90o муфта разомкнута. На участке от 90o до 180o происходит процесс переключения, причем при 180o достигается нейтральное положение, а на участке от 180o до 270o происходит процесс переключения прежде, чем на участке от 270o до 360o муфта снова замыкается.
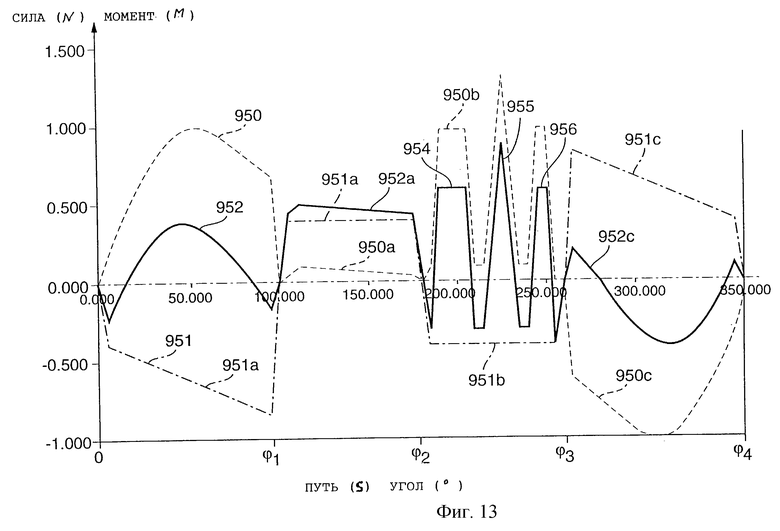
На фиг.13 показано действие компенсации на силы и моменты на муфте и силу переключения. Кривая 950 соответствует на первом участке ϕ1 характеристике силы выключения, на участке от ϕ1 до ϕ2 - характеристике выведения ступени передачи в соответствии с кривой 950а, на угловом участке от ϕ2 до ϕ3 в соответствии с кривой 950b - процессу введения ступени передачи, а на угловом участке от ϕ3 до ϕ4 в соответствии с кривой 950с - процессу включения. Кривая 951 соответствует силе или моменту компенсации, причем на участке 951а компенсация отрицательна, при ϕ1 происходит смена направления силы на положительное, на участке от ϕ1 до ϕ2 в соответствии с кривой 951 компенсация положительна, на участке от ϕ2 до ϕ3 в соответствии с кривой 951b она отрицательна, а при ϕ3 снова происходит изменение направления, как и на участке от ϕ3 до ϕ4 в соответствии с кривой 951с, где компенсация является положительной. Сплошной линией 952 изображена результирующая линия или результирующий момент, как сумма сил 950 на муфте и силы переключения и компенсационной силы 951. Можно видеть в целом заметное уменьшение максимальных значений по сравнению с чистыми силами на муфте и силы переключения согласно кривой 950. На угловом участке от 0o до ϕ1 имеет место уменьшенная сила на муфте, на участке от ϕ1 до ϕ2 видно нарастание сил на муфте, тогда как на участке от ϕ2 до ϕ3 происходит снижение сил переключения. Максимум 954 возникает вследствие процессов синхронизации и расфиксации, максимум 955 - вследствие процесса ввода зубьев в зацепление при переключении, а максимум силы 956 - вследствие набегания на упор в редукторе. На участке от ϕ3 до ϕ4 характеристика силы включения снижается по своему значению с 950с до 952с. В целом достигается снижение значений сил на муфте и силы переключения.
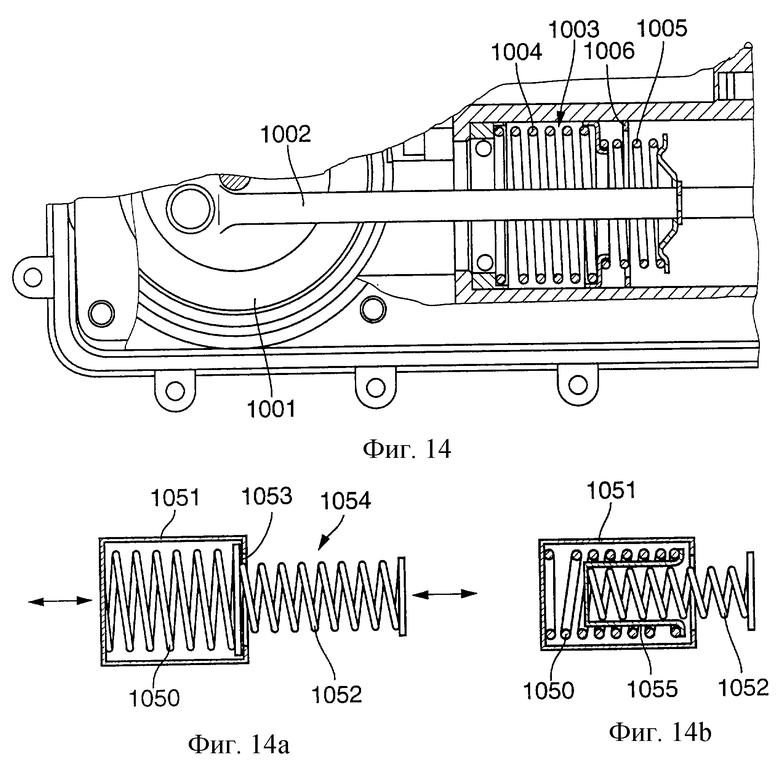
На фиг.14 показана часть исполнительного механизма согласно фиг.1 с червячным колесом 1001, шатуном 1002 и энергоаккумулятором 1003. Энергоаккумулятор 1003 в отличие от энергоаккумулятора 25 на фиг.1 составлен из двух расположенных один за другим энергоаккумуляторов 1004 и 1005, причем двухступенчатая характеристика достигается благодаря тому, что энергоаккумулятор 1004 выполнен в виде более мягкой пружины, чем энергоаккумулятор 1005. Элемент 1006 служит упором для предварительного натяжения. Благодаря применению энергоаккумуляторов различной жесткости можно получить многоступенчатую характеристику воздействия компенсационной силы.
На фиг. 14а и 14b показаны примеры исполнения с двумя энергоаккумуляторами, причем применение более чем двух энергоаккумуляторов может оказаться целесообразным для получения многоступенчатой характеристики силы. Энергоаккумулятор 1050 вставлен в державку 1051, где он может быть подвергнут предварительному натяжению. Энергоаккумулятор 1052 действует через элемент 1053 на предварительно натянутый энергоаккумулятор 1050, причем при осевом воздействии на элемент 1054 сначала силу воспринимает и деформируется энергоаккумулятор 1052 до тех пор, пока не будет преодолена сила предварительного натяжения, после чего начинает сжиматься и энергоаккумулятор 1050.
На фиг. 14b показан вариант исполнения, при котором элемент 1055 между энергоаккумуляторами 1050 и 1052 имеет чашеобразную форму, благодаря чему можно лучше использовать осевое конструктивное пространство, если путь приведения в действие достаточно мал и допускает такую конструктивную форму. В случае сравнительно большого осевого пути приведения в действие целесообразен вариант исполнения согласно фиг.14а. Элемент 1051 имеет чашеобразную форму, а элемент 1055 имеет по меньшей мере чашеобразное поперечное сечение.
Подвергаемые предварительному натяжению пружины согласно фиг.14а и 14b могут иметь меньшую жесткость, чем пружины, не подвергаемые предварительному натяжению.
На фиг.15 показан пример исполнения узла компенсационной пружины в устройстве для приведения в действие системы передачи крутящего момента и (или) редуктора, где в корпусе 1001 установлен по меньшей мере один пружинный узел 1101a, 1101b, который при помощи опоры 1102, 1103 соединен с корпусом неподвижно, но с возможностью качаний, а кроме того, посредством соединения 1104, 1105 присоединен с возможностью качания к ведомому элементу 1106. Элемент 1106 на участке 1106а соединен с приводом так, что может происходить его осевое перемещение, причем на выходной стороне участок 1106 воздействует на выходной элемент для приведения его в действие. При осевом перемещении элемента 1106 передвигаются в осевом направлении шарнирные участки 1104 и 1105, тогда как шарнирные участки 1102 и 1103 остаются на месте, вследствие чего происходит относительное перемещение элементов, воздействующих на энергоаккумуляторы 1110 и 1111, которые оказывают силовое воздействие на элемент 1106. Энергоаккумуляторы 1110 и 1111 устроены таким образом, что они по меньшей мере в одном (например, конечном) положении оказывают силовое воздействие только в одном направлении перпендикулярно к оси движения элемента 1106. Однако при смещении элемента 1106 одна составляющая силы воздействия пружин на элемент 1106 действует в направлении движения этого элемента. Сила может действовать и в противоположном направлении, создавая составляющую в направлении оси движения. Это схематически иллюстрируется на фиг.15b, где элемент 1120 смонтирован подвижно, а энергоаккумуляторы 1121 и 1122 соединены как с корпусом, так и с элементом 1120, причем например в конечном положении пружины 1120 и 1121 согласно изображению находятся под предварительным натяжением. При осевом перемещении элемента 1120 точка подвеса 1123 передвигается в том же направлении до точки 1124, вследствие чего силовое воздействие энергоаккумуляторов 1121 и 1122 проявляется и в осевом направлении. Энергоаккумуляторы можно выполнить таким образом, что в конечном положении достигается мертвая точка, благодаря чему они не действуют как пружины с переходом за мертвую точку. Однако может также оказаться целесообразным, чтобы энергоаккумуляторы действовали как пружины с переходом через мертвую точку, причем тогда в конечной точке приведения в действие действует осевая сила. Эта осевая сила отсутствует, когда в конце пути приведения в действие пружины находятся в мертвой точке.
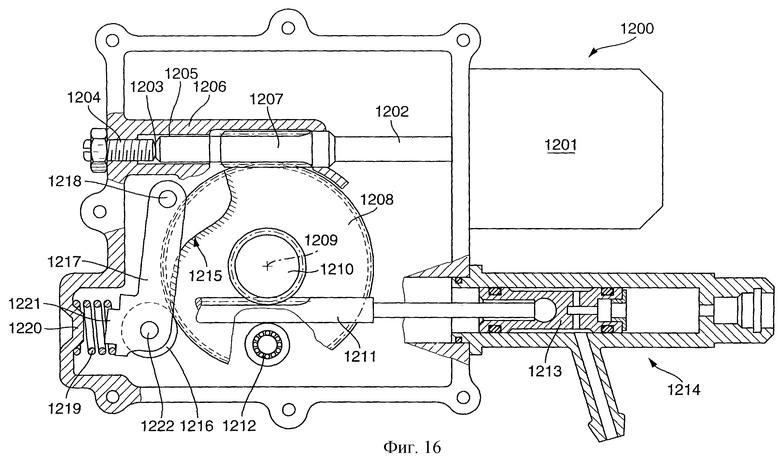
На фиг.16 показано устройство 1200 для приведения в действие с приводным узлом 1201 в виде электродвигателя. Электродвигатель 1201 приводит во вращение вал 1202, который на участке 1203 опирается и упирается в осевом направлении в элемент 1204. Кроме того вал 1202 на участке 1203 вставлен в отверстие или направляющую 1205 в стенке корпуса 1206. С валом 1202 соединен для передачи вращения червяк 1207. Червяк 1207 входит в зацепление с червячным колесом 1208. который смонтирован в подшипнике 1209. К червячному колесу 1208 прикреплено или выполнено с ним за одно целое зубчатое колесо 1210. Зубчатое колесо 1210 находится в зацеплении с зубчатой рейкой 1211, которая управляет поршнем 1213 ведущего цилиндра 1214, работающего от напорной среды, например ведущего гидроцилиндра. Зубчатая рейка 1211 опирается на ролик 1212 или подшипник в радиальном направлении зубчатого колеса 1210. Червячное колесо 1208 или соединенное с ним колесо, например зубчатое колесо 1210, имеет криволинейный профиль, на который прямо или косвенно воздействует энергоаккумулятор 1219. Энергоаккумулятор 1219 установлен между опорным участком корпуса 1206 и опорным участком рычага 1217, который смонтирован с возможностью качаний в подшипнике 1218. На рычаге имеется ролик 1216, смонтированный в подшипнике 1222. Ролик катится по контуру криволинейного профиля 1215, воздействуя на него и создавая таким образом на выходном элементе устройства обусловленную формой профиля силу, зависящую от пути и положения. В корпусе 1206 предусмотрен опорный участок 1220, а в рычаге 1217 опорный участок 1221, которые входят в концевые участки энергоаккумулятора, в данном случае винтовой пружины сжатия, чтобы в основном придать энергоаккумулятору нужное положение и обеспечить невозможность его утери.
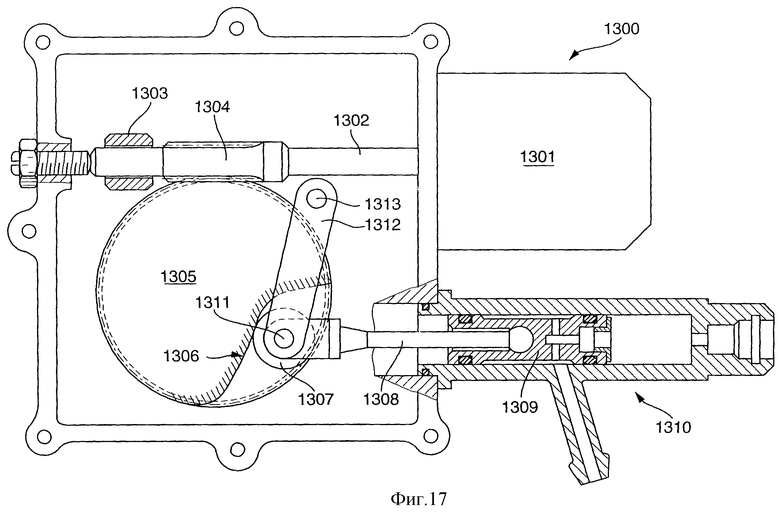
На фиг. 17 показано еще одно целесообразное исполнение предлагаемого устройства 1300 для приведения в действие. Устройство 1300 имеет приводной узел 1301, который может быть выполнен в виде электродвигателя. Электродвигатель вращает вал 1302, который опирается на участке 1303 в подшипнике скольжения или качения. На валу 1302 посажен для передачи ему вращения червяк 1304, находящийся в зацеплении с червячным колесом 1305. Червячное колесо 1305 имеет контур или криволинейный профиль 1306, в который упирается скользящий или вращающийся элемент, например ролик 1307 или опорный башмак. Ролик 1307 смонтирован на рычаге или на шатуне 1308, который воздействует на поршень 1309 ведущего цилиндра 1310, приводимого в движение напорной средой, например гидроцилиндра. Ролик 1307 посажен с возможностью вращения в подшипнике 1311. На участке подшипника 1311 шарнирно подвешен рычаг 1312, шарнирно подвешенный с другой стороны на участке 1313. Рычаг 1312 направляет движение шатуна 1308 под действием вращающегося контура 1306 при вращении зубчатого колеса 1305. Благодаря этому можно достигнуть модуляции поршня ведущего цилиндра в функции пути вращения червячного колеса или вообще в функции движения приведения в действие.
В формах исполнения согласно фиг.16 и 17 показаны варианты, при которых предпочтительно ось двигателя, в частности вала, располагается параллельно оси шатуна или толкателя выходного элемента. Кроме того, червячное колесо может образовать с валом двигателя одну плоскость, а шатун или толкатель могут располагаться в этой плоскости или вне ее.
Рассматриваемое изобретение относится также к поданной прежде заявке DE 19622641, содержание которой полностью входит в объем раскрытия рассматриваемого изобретения.
Указанные в данной заявке пункты формулы изобретения являются предложениями, не предрешающими получение дальнейшей патентной охраны. Заявитель оставляет за собой право истребовать приоритет на другие признаки, которые до сих пор были раскрыты только в описании и (или) чертежах.
Ссылки, содержащиеся в дополнительных пунктах формулы изобретения, указывают на новое исполнение предмета главного пункта, характеризуемое признаками данного дополнительного пункта, их не следует понимать как отказ от получения самостоятельной предметной патентной охраны для признаков дополнительных пунктов, на которые делается ссылка.
Предметы этих дополнительных пунктов формулы изобретения образуют самостоятельные изобретения, которые имеют форму, не зависящую от предметов предыдущих дополнительных пунктов.
Изобретение также не ограничивается примером (примерами) исполнения, данными в описании. Напротив, в рамках данного изобретения возможны многочисленные разновидности и модификации, в частности такие варианты, элементы и комбинации и (или) материалы, которые например ввиду комбинации или вариации отдельных признаков, элементов и этапов способов, описанных в общем описании и в формах исполнения или в пунктах формулы изобретения и содержащихся в чертежах, обладают изобретательской новизной и благодаря комбинируемым признакам приводят к новому предмету или к новым этапам способов или к последовательностям этапов способов, в том числе и если они относятся к способам изготовления, испытания и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1996 |
|
RU2219077C2 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202479C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ КОНТРОЛЯ ЗА РАБОТОЙ КОРОБКИ ПЕРЕДАЧ АВТОМОБИЛЯ И АВТОМОБИЛЬ ДЛЯ ПРИМЕНЕНИЯ СПОСОБА | 1997 |
|
RU2180716C2 |
| ФРИКЦИОННАЯ МУФТА, АВТОМОБИЛЬ С ФРИКЦИОННОЙ МУФТОЙ, СЦЕПНОЙ АГРЕГАТ (ВАРИАНТЫ), СЦЕПНОЙ АГРЕГАТ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, УЗЕЛ ПРИВОДА | 1992 |
|
RU2128792C1 |
| ФРИКЦИОННАЯ МУФТА И УСТРОЙСТВО СЦЕПЛЕНИЯ | 1992 |
|
RU2238451C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА | 1994 |
|
RU2146781C1 |
| ФРИКЦИОННАЯ МУФТА | 1992 |
|
RU2137955C1 |
| РЕГУЛЯТОР ТЯГОВОГО МЕХАНИЗМА ДЛЯ БАРАБАННОГО ТОРМОЗА И БАРАБАННЫЙ ТОРМОЗ | 2006 |
|
RU2395018C2 |
| МЕХАНИЗМ ВЫКЛЮЧЕНИЯ СЦЕПЛЕНИЯ | 1994 |
|
RU2143618C1 |

Изобретение относится к автомобильной промышленности. Устройство предназначено для автоматического переключения, и (или) выбора передаточного отношения редуктора, и (или) для автоматического приведения в действие системы передачи крутящего момента в приводной цепи автомобиля, в состав которого входит приводной узел и в случае надобности редуктор, а также функционально соединенный с ними посредством приводного соединения выходной элемент для приведения его в действие, с, по меньшей мере, одним воздействующим на выходной элемент энергоаккумулятором. С приводным соединением функционально соединен воспринимающий силу элемент с пространственным геометрическим контуром, например с криволинейным профилем, или с криволинейным диском, или с кулачком, и силовое воздействие, по меньшей мере, одного энергоаккумулятора передается на выходной элемент через упомянутый пространственный геометрический контур элемента. В результате повышается точность и надежность автоматического переключения передач автомобиля. 2 с. и 36 з.п.ф-лы, 17 ил.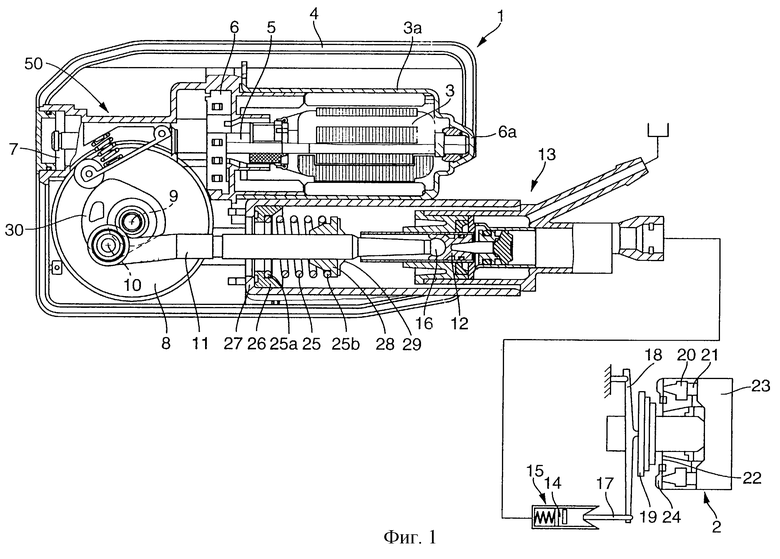
| DE 19504847 A1, 28.09.1995 | |||
| DE 19506704 A1, 22.02.1996 | |||
| DE 4220752 A1, 13.01.1994 | |||
| Шарнирно-рычажный механизм | 1986 |
|
SU1368547A1 |
| УСТРОЙСТВО для ОТБОРА И НАКОПЛЕНИЯ МОЩНОСТИ НА ТРАНСПОРТНОЙ МАШИНЕ | 0 |
|
SU404656A1 |
| Транспортное средство | 1979 |
|
SU787196A1 |

