Изобретение относится к военной технике, в частности к способам управления скоростями и углами наведения артустановок, и может быть использовано в следящих системах, работающих в более агрессивных внешних средах при повышенном уровне механических нагрузок, например в системах корабельных артустановок.
Известны способы управления скоростями и углами наведения артустановок путем коррекции следящей системы, обусловленной введением различных обратных связей (Машиностроительный гидропривод. Под ред. Прокофьева В.Н. - М.: Машиностроение, 1978, стр. 318, 367).
Однако при коррекции, в частности, следящей системы с объемным гидроприводом введение обратной связи по скорости вращения оси вращения артустановки часто приводит к потере жесткости характеристик к моментным возмущениям в средне- и высокочастотной области воздействий, да и сам контур обратной связи по скорости неустойчив и вызывает достаточно низкочастотную вибрацию.
Известна корабельная артустановка, содержащая следящую систему с объемным гидроприводом горизонтального и вертикального наведения, включающим каждый гидронасос, связанным через соответствующий редуктор с осью вращения артустановки, введенные в систему датчики рассогласования, датчики по скорости вращения артустановки (АК-630, АК-630М ТО Артиллерийские установки, Техническое описание, Инструкция по эксплуатации, стр. 87-95).
Недостатком таких установок являются недостаточные точностные характеристики из-за больших кинематических погрешностей гидроприводов.
Основной задачей изобретения является повышение динамических и точностных характеристик артустановки за счет повышения жесткости и демпфирования резонансных всплесков находящегося в контуре следящей системы колебательного звена, коим является гидропривод, с целью конкурентоспособности артустановки на мировом рынке.
Другой технической задачей является в соответствии с этим способом создание работающих в условиях значительных моментных возмущений гидроприводов следящей системы с высокими точностными характеристиками кинематических связей механической передачи.
Решение поставленной задачи обеспечивается тем, что в способе управления скоростью и углами наведения артустановки, содержащей следящую систему с объемным гидроприводом, путем коррекции функций переменных его, обусловленной введением в контур следящей системы обратной связи по скорости вращения оси артустановки, в следящую систему дополнительно вводят динамическую местную обратную связь по давлению, суммируют ее сигнал с сигналом обратной связи по скорости и, исходя из устойчивости гидропривода, определяют коэффициент ввода сигнала по давлению при постоянной времени Тд, вдвое меньшей по отношению к постоянной времени гидропривода Тгп.
Решение поставленной задачи обеспечивается также тем, что артустановка, содержащая гидронасос, соединенный силовыми магистралями с гидромотором, регулятор, включающий датчики рассогласования, дополнительно снабжена подключенными на вход гидромотора индуктивными датчиками по давлению, а также по месту установки датчиков рассогласования упругокомпенсирующим устройством. Упругокомпенсирующее устройство выполнено из двух скрепленных промежуточной крестовой втулкой неподвижных дисков с расположенными в пазах втулки выступами на поверхности диска, причем выступы подпружинены по боковым торцам.
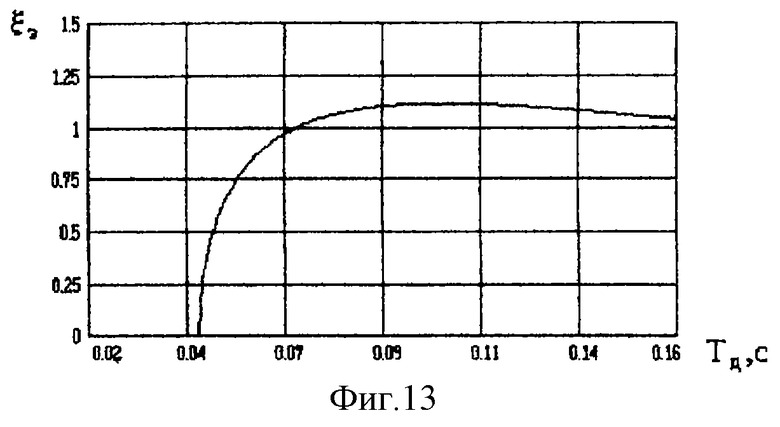
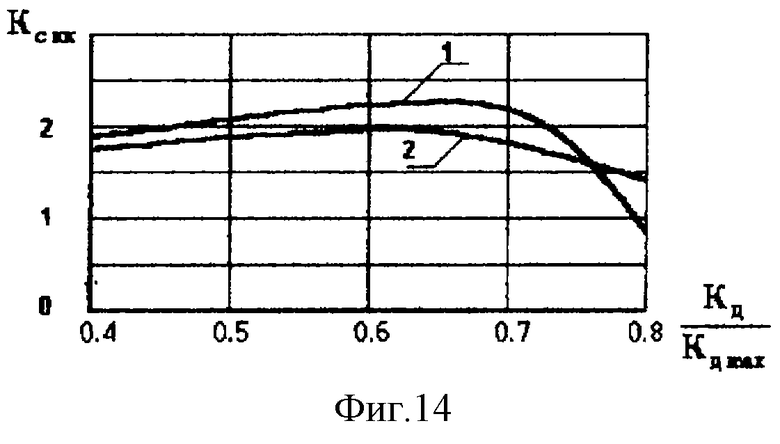
Изобретение поясняется чертежами, где на фиг.1 изображена блок-схема артустановки; на фиг.2 - гидропривод; на фиг.3 - схема гидравлическая гидропривода; на фиг.4 - схема структурная гидропривода; на фиг.5 - схема редуктора горизонтального наведения; на фиг.6 - схема редуктора вертикального наведения; на фиг. 7 - схема установки датчика рассогласования; на фиг.8 - крестовая втулка; на фиг. 9 - диск упругокомпенсирующего элемента, в двух проекциях; на фиг. 10 - электрическая схема усилителя; на фиг.11 - структурное изображение математической модели гидропривода; на фиг.12 - характеристика моментной жесткости замкнутого гидропривода и слабой обратной связи по скорости вращения; на фиг.13 - график зависимости коэффициента затухания от постоянной времени; на фиг.14 - зависимость жесткой обратной связи по скорости от динамической обратной связи по давлению.
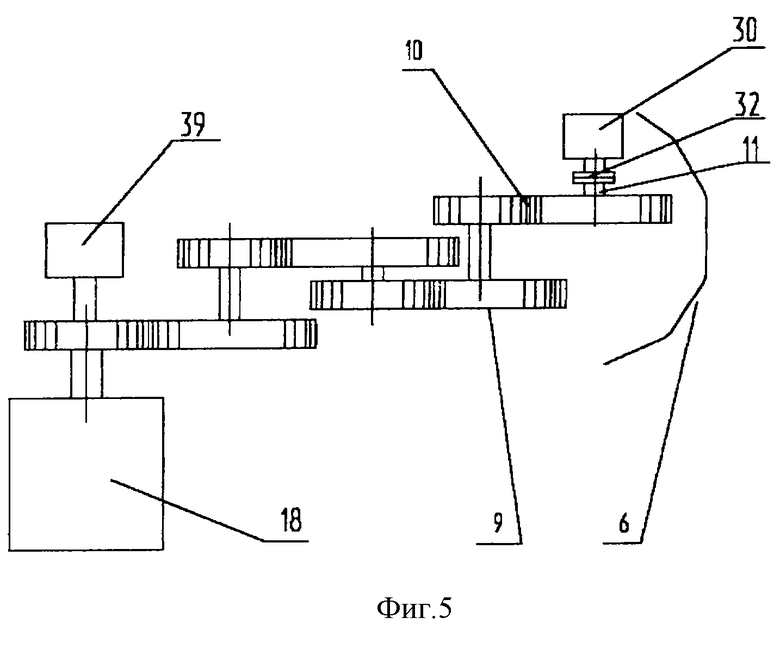
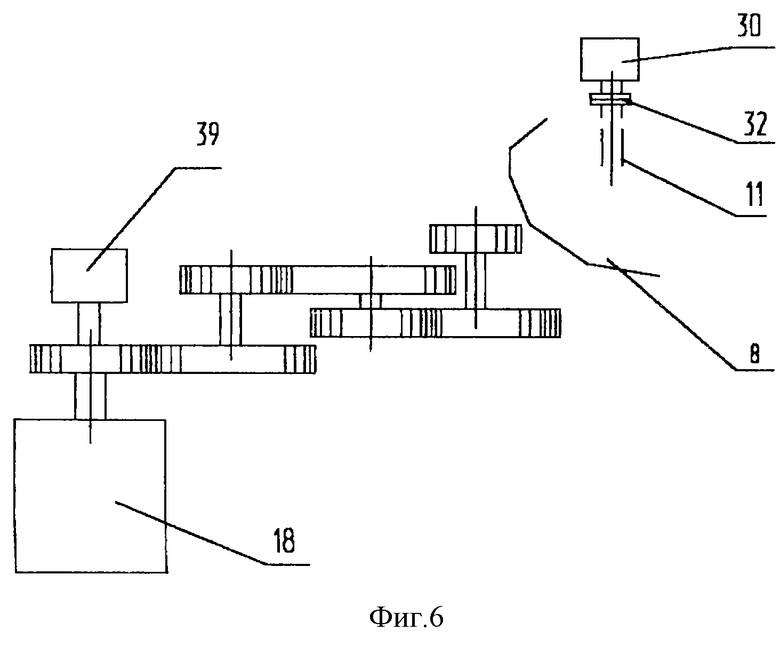
Артустановка (АУ) 1 включает в себя вращающуюся 2 и качающуюся 3 части, которые обеспечивают наведение автомата 4 в горизонтальной и вертикальной плоскостях. На вращающейся части артустановки расположены механизмы наведения - редуктор 5 горизонтального наведения, находящийся в зацеплении с погоном 6, и редуктор 7 вертикального наведения, находящийся в зацеплении с сектором люльки 8. На выходном валу 9 (фиг.5) коренной шестерни редуктора горизонтального наведения установлено безлюфтовое зубчатое зацепление 10 с передаточным отношением, при котором угол поворота его выходного вала 11 равен углу поворота погона, что позволяет избежать дополнительных напряжений кинематической связи в цепи редуктор - погон.
Следящая система артустановки включает силовую часть и электронную. К силовым элементам следящей системы относятся два объемных гидропривода 12 горизонтального и вертикального наведения соответственно, расположенные на вращающейся части артустановки и управляемые независимо друг от друга от задающего устройства (ПУС) 13. ПУС (приборы управления системой) расположено вне установки и определяет перемещения командной оси 14 (неизмеряемая координата, фиг.4) вращения артустановки.
Гидропривод горизонтального наведения идентичен гидроприводу вертикального наведения.
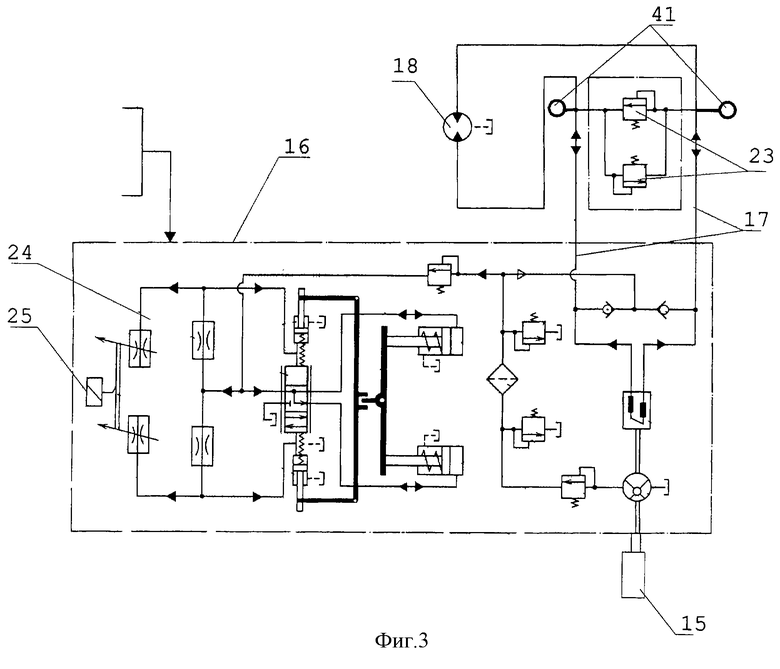
Каждый гидропривод (фиг.2) составляется из приводного двигателя 15, гидронасоса (Н) 16 объемного регулирования аксиально-поршневого типа. Гидронасос относится к усилительной части следящей системы. Силовыми магистралями 17 трубопровода гидронасос связан с гидромотором (ГМ) 18, который относится к исполнительной части следящей системы. Выходной вал 19 его связан с редуктором поворота оси (регулируемой координаты) вращения артустановки 20 (горизонтальная ось 21 артустановки - ось погона для привода горизонтального наведения и вертикальная ось 22 - ось сектора люльки для привода вертикального наведения).
В каждой силовой магистрали установлен предохранительный клапан 23 для ограничения максимального давления рабочей жидкости в одной из магистралей.
Дистанционно насос управляется двухкаскадным механизмом управления 24 (типа сопло - заслонка - золотник) с магнитным электромеханическим преобразователем (ЭМ) 25 (фиг.3), преобразующим поток рабочей жидкости в движение гидромотора.
Для выработки сигналов торможения на погоне 6 на предельных углах рабочей зоны по горизонтальному наведению (соответственно на секторе люльки упоры рабочей зоны по вертикальному наведению не показаны) установлены жесткие упоры 26.
Электронная часть следящей системы включает станцию управления (СУ) 27, предназначенную для формирования угла поворота командной оси ПУС (αg - управляющее воздействие) и его производной для силовой части.
Станция управления (СУ) находится в центральном посту корабля. К электронному блоку торможения (БТ) 28 станции управления подключены жесткие упоры.
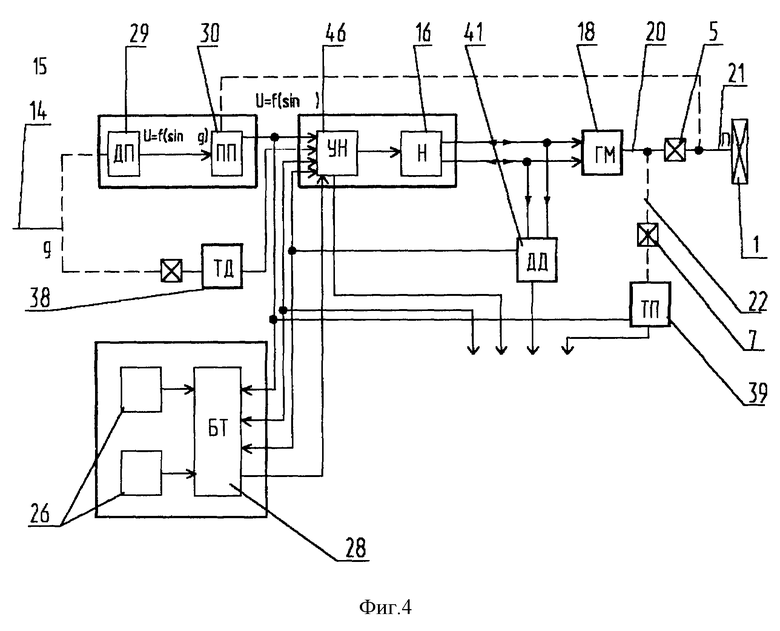
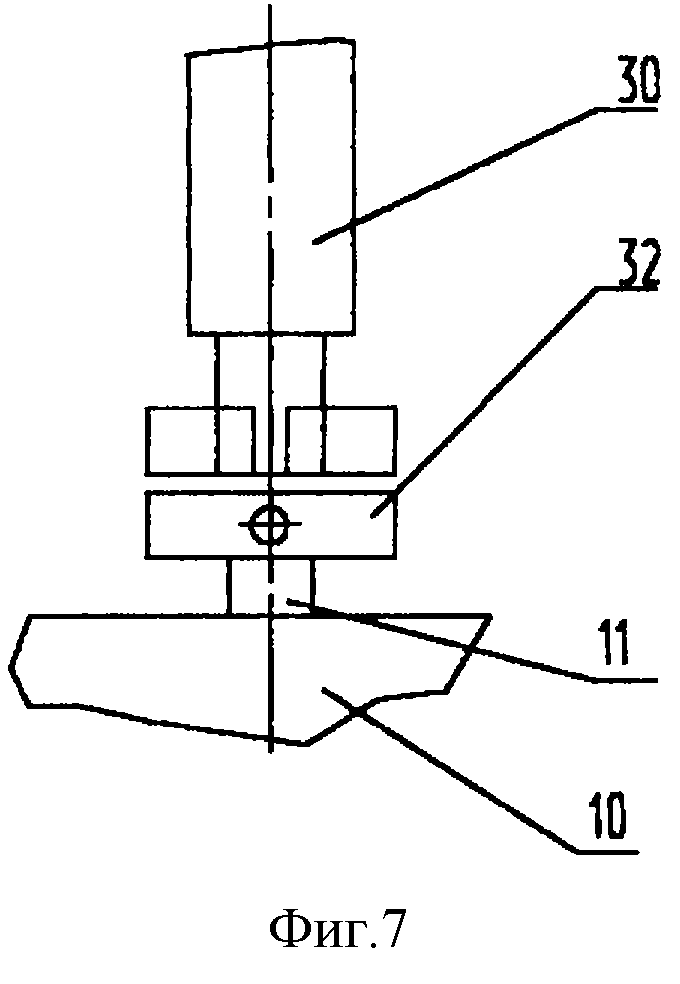
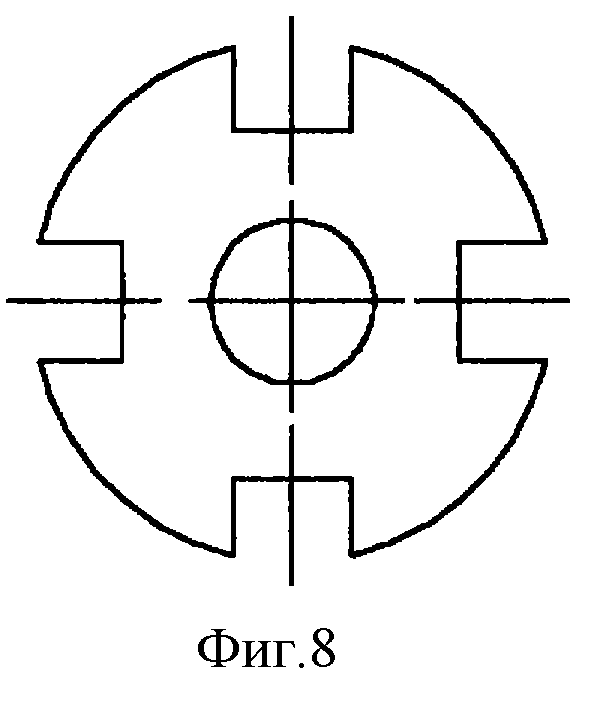
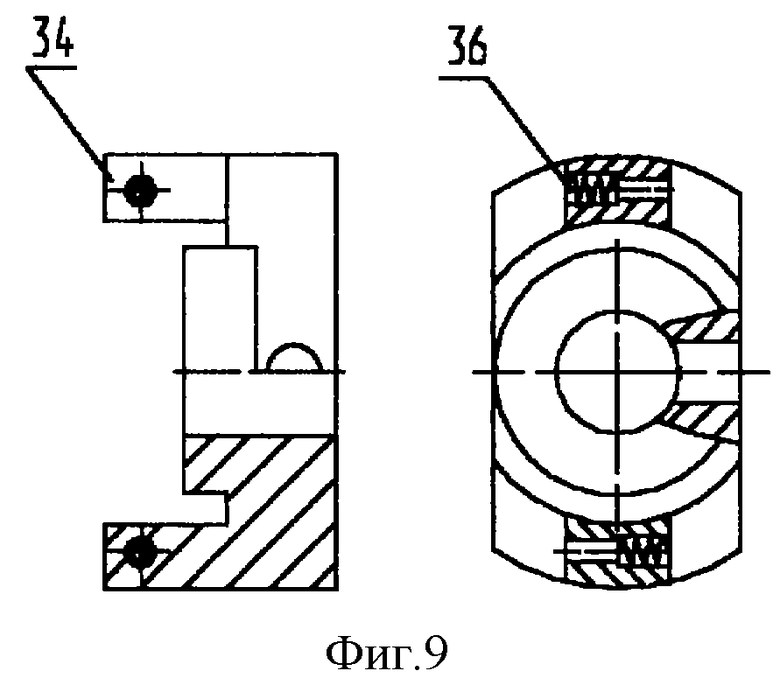
Сравнение истинных значений управляемых переменных с соответствующими предписанными значениями производится на входе электронного регулятора следящей системы. Регулятор (фиг.4) включает измерительную часть, к которой относятся датчики рассогласования ДП 29 и ПП 30, дающие информацию об угловых перемещениях регулируемой величины - оси вращения (горизонтальной и вертикальной) артустановки. Датчики замкнуты главной обратной связью 31 выхода со входом, которая, по сути дела, служит для измерения результата действия системы. В качестве датчиков рассогласования используются синусно-косинусные вращающиеся трансформаторы, соединенные между собой в трансформаторном режиме. Дающий датчик ДП установлен в ПУС и связан с командной осью 14 вращения (не показано). Принимающий ПП горизонтального наведения закреплен на выходном валу 11 безлюфтового зубчатого зацепления (фиг.5), что позволило повысить точностные характеристики. Принимающий ПП вертикального наведения (фиг. 6) установлен непосредственно на вертикальной оси вращения артустановки (на оси люльки). По месту установки датчики рассогласования имеют зажимное упругокомпенсирующее устройство 32 (фиг.7), которое состоит из двух идентичных дисков 33 с выступами 34 на поверхности, входящими в пазы промежуточной крестовой втулки 35. Для повышения точности измерения угла поворота осей артустановки в выступах дисков по боковому торцу выполнены углубления под пружину 36, что позволяет нейтрализовать погрешности в соосности, вызванные некачественной поверхностью соприкасаемых выступов дисков и крестовой втулки.
В следящую систему введена местная корректирующая жесткая обратная связь 37 по скорости вращения осей артустановки, сигналы которой реализуются датчиками по скорости вращения. В качестве датчиков по скорости используются дающий тахогенератор (ТД) 38, установленный на командной оси в ПУС (не показано), и тахогенератор принимающий (ТП) 39, установленный на выходном валу 19 гидромотора. В следящую систему дополнительно введена корректирующая динамическая обратная связь 40 по давлению, сигналы которой реализуются двумя индуктивными датчиками по давлению (ДД) 41, установленными на каждой из силовых магистралей гидропривода.
Формирование управляющего сигнала осуществляются при помощи R-элементов, обозначенных соответственно Rтд 42, Rтп 43, Rпп 44, Rдд 45, размещенных в функциональном электронном усилителе (УН) 46 станции управления.
Питание следящей системы осуществляется от корабельной сети (СЕТЬ) 47 через блок управления (БУ) 48, размещенного вне установки.
Управление скоростями и углами наведения осуществляется от задающего устройства ПУС 13 через СУ 27. Принцип управления поясняется на примере работы гидропривода горизонтального наведения. Управление по каналу вертикального наведения указано в скобках.
В режиме "исходное положение" питание подключено на ПУС 13, на СУ 27, на тахогенераторы ТД38, ТП39 и датчики давления ДД41 гидропривода. От электродвигателя 15 трубопроводы гидропривода пополняются рабочей жидкостью, однако ни всасывания, ни нагнетания в силовых 17 магистралях нет, т.к. на электромагнит ЭМ 25 механизма управления 24 не поступает управляющий сигнал αg (угол поворота командной 14 оси ПУС), поэтому вал 19 гидромотора 18 не вращается. Система находится в согласованном положении, при котором положение командной оси совпадает с положением оси вращения артустановки 20, т. е. αg = αп (αп - угол поворота оси артустановки).
При сопровождении артустановкой цели с ПУС подается команда "дистанционное управление". На вход управляющего воздействия, которым является поворот вала датчика ДП 29, на некоторый угол αg относительно согласованного положения, определяемого поворотом его на угол αп в зависимости от положения артустановки относительно заданного направления цели, поступают переменные напряжения изменяющейся фазы f (sin αg). Эти напряжения выпрямляются в виде задания на перемещение f (sin θ), значение которого определяется значением угла рассогласования θ = αg-αп, а фаза - направлением поворота относительно согласованного положения, т.е. знаком угла, и поступают предварительно просуммированные сигналы местных обратных связей по скорости от тахогенераторов ТД 38, ТП 39 и по давлению от датчиков ДД41 на вход электронного усилителя УН 46. На этот же вход поступают выходные сигналы от датчиков дающего ДП 29 и принимающего ПП 30. Благодаря корректирующим элементам R-цепи формируется сигнал управления с частотной коррекцией по напряжению и мощности до необходимой величины переменной выхода, который и направляется на ЭМ 25 механизма управления, в виде разности токов определенной полярности, определяемая фазой рассогласования θ. При поступлении управляющего сигнала Uупр на ЭМ в силовых 18 магистралях возникает разность давления, что обеспечивает соответственно скорость и направление вращения вала 19 ГМ, который через редуктор поворачивает артустановку в горизонтальной или вертикальной плоскости, чтобы угол рассогласования приблизить к нулю, пока не установится равенство αg = αп.
При увеличении давления в какой-нибудь из силовых магистралей выше допустимого срабатывает один из предохранительных клапанов 23, что позволяет пропустить рабочую жидкость из магистрали высокого давления в магистраль низкого давления.
При слежении цели возможны случаи подхода АУ к жестким упорам 26. При подходе к одному из упоров по горизонтальному (вертикальному) наведению сигнал поступает в БТ 28. Последний, получив сигнал, отключает сигнал управления, и, одновременно суммирует только сигналы от тахогенератора ТП 39 и двух датчиков ДД 41. Этот сигнал поступает на вход усилителя УН 46, где усиливается по постоянному току с частотно-зависимой коррекцией и формируется в напряжение обратной связи по току, как разности токов усилителя ЭМ насоса. При дальнейшем движении АУ в сторону жесткого упора и касании его растет напряжение ДД и, благодаря действию отрицательной обратной связи по давлению, осуществляется разгрузка гидропривода, что обеспечивает получение минимального угла торможения и позволяет не доводить нарастание давления в силовых полостях до величины, при которой начинается срабатывание предохранительных клапанов. При этом сигнал ТП 39 уменьшается и по мере уменьшения токи в усилителе выравниваются, гидропривод останавливается.
Гидропривод корабельной системы представляет собой совместно с регулируемым гидромотором ярко выраженное колебательное звено, к особенностям которого можно отнести малый коэффициент затухания (ξгп<0,2), а также узкую полосу пропускания механизма управления насоса 16 в сочетании с резонансной частотной характеристикой. Учитывая, что система работает в условиях ударных нагрузок при дополнительном воздействии спектра моментных возмущений Мв низкой и средней частоты, кроме того, нежесткость редуктора механической передачи, что снижает динамические ее свойства, определяли передаточные функции звеньев по жесткости гидропривода.
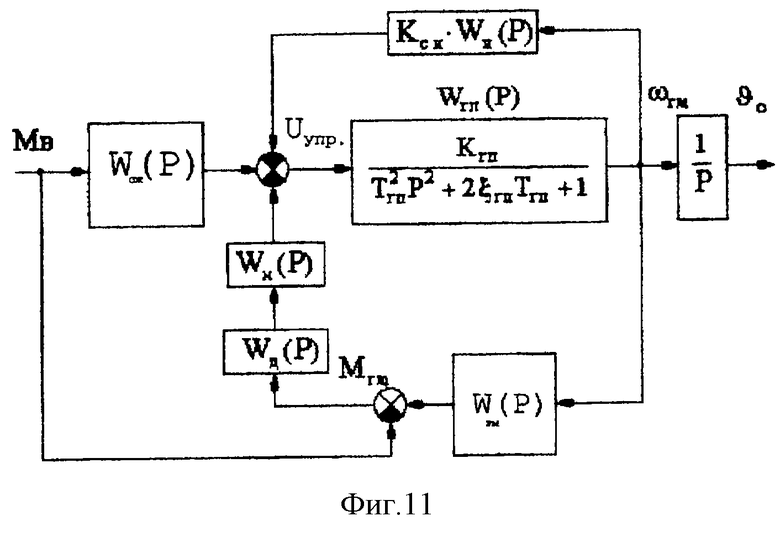
На фиг. 11 изображена математическая модель гидропривода, она находится по структурной схеме (фиг.4) и передаточными функциями составляющих ее звеньев.
Передаточная функция Wp(P) по жесткости разомкнутого объемного гидропривода имеет вид
где Wсж(Р) - передаточная функция гидропривода по моменту гидромотора (Мгм) с передаточной функцией
и потоку сжатия жидкости (Qсж), равная
Исходя из условия его устойчивости, в тракте управления по скорости ошибки ∂o передаточная функция гидропривода следящей системы, охваченного главной обратной связью 31, имеет вид
где ωгм - скорость вращения гидромотора;
Qгп - поток гидроприводов;
Кгп - коэффициент передачи;
Т - постоянная времени;
ξ - коэффициент затухания.
При коррекции объемного гидропривода в плане компенсации моментных возмущений, а также для эффективного демпфирования резонанса гидропривода (резонансы 5,2 Гц) и повышения устойчивости скоростной обратной связи 37 с передаточной функцией Wcк(P), вводят определяющую динамику замкнутого привода в области средних частот цепь обратной связи 40 по давлению Wд(P) с дифференцирующим элементом Rдд.
Передаточная функция скорости ошибки ∂o от моментных возмущений при замыкании системы динамической обратной связью с передаточной функцией по давлению и скорости вращения ωгм гидромотора с передаточной функцией Wгм(P) = ωгм/Mгп получается в виде
Частотные характеристики в области средних частот 1/Тд... 1/Тгп (Тгп - постоянная времени гидропривода), определяющие зависимость моментной жесткости замкнутого гидропривода при постоянной времени датчиков давления 41 Тд = 0,16 с и слабой обратной связи по скорости вращения вала гидромотора 18 (кривая 1 фиг.12), показали, что объемный гидропривод теряет одно из своих основных качеств - жесткость к моментным возмущениям (кривая 2 - характеристика разомкнутого гидропривода).
Чтобы объемный гидропривод не потерял свои жесткостные характеристики к моментным возмущениям, проводили коррекцию жесткой скоростной отрицательной обратной связи Wск(Р), эффективность которой зависела бы от коэффициентов усиления обоих контуров Кскк (фиг.14, кривая 1 - без введения обратной связи по давлению, кривая 2 - введена обратная связь по давлению с дифференцирующим коэффициентом Кд/Кдмах). Кскк - суммарный коэффициент усиления по скоростному контуру, Кдмах - исходя из устойчивости гидропривода, максимальный коэффициент усиления обратной связи по давлению.
Для снижения возможного отрицательного влияния обратной связи по давлению 40 в данной частотной области определяли зависимость жесткой скоростной обратной связи от сигналов динамической обратной связи по давлению, при этом постоянная времени Тд должна быть как можно меньше.
При оценке влияния величины постоянной времени Тд на демпфирующие свойства обратной связи по давлению определяли эквивалентную передаточную функцию гидропривода, замкнутого обратной связью по давлению при Тк = Тн при пренебрежении малыми постоянными времени насоса по сравнению с Тгп и Тд
где λ - общий коэффициент усиления гидропривода
К2 - коэффициент пропорциональности;
Tэ, ξэ - параметры эквивалентной передаточной функции.
С целью достижения требуемых запасов устойчивости привода по амплитуде определяли достаточный коэффициент затухания гидропривода 12 как колебательного звена ξ при условии, что повышение коэффициента затухания не должно уменьшить его постоянную времени Тгп и коэффициент усиления Кскк системы, приводящее к уменьшению частоты среза системы.
Коэффициент затухания гидропривода эквивалентной передаточной функции от значения постоянной Тд определяется
Степень влияния коэффициента затухания гидропривода эквивалентной передаточной функции и значения Тд на устойчивость обратной связи по скорости вращения вала гидромотора представляется кривой 1 на фиг.13 при Тд = 0,066 с, кривой 2 - при Тд = 0,16 с. Коррекция системы по динамическому давлению определила, что демпфирующие свойства динамической обратной связи по давлению практически не зависят от постоянной времени Тд, что выполняется при 2Тгп = Тд, и при данной структуре коррекции некоторое уменьшение дифференцирующего коэффициента ввода динамической обратной связи по давлению (кривая 2 фиг.14) не ведет к значительному снижению добротности скоростного контура. Таким образом, для объемного гидропривода, работающего в условиях значительных моментных возмущений, величина постоянной времени корректирующего элемента в цепи обратной связи по давлению принимается Тд = 2 Тгп при коэффициенте ввода обратной связи по давлению Кд = 0,6 Кдмах (кривая 2, фиг.12).
В скорректированной системе при полученных параметрах коэффициента усиления за счет получения гармонического закона изменения скорости и компенсирующей установки измерительных датчиков рассогласования увеличена точность контроля положения осей вращения артустановки по вертикальному и горизонтальному наведению до 3 т.д., 2 т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 2001 |
|
RU2191969C1 |
| ГИДРОПРИВОД ЛЕТУЧИХ КАЧАЮЩИХСЯ НОЖНИЦ | 1998 |
|
RU2134194C1 |
| ГИДРОПРИВОД ЛЕТУЧЕЙ ПИЛЫ | 1996 |
|
RU2093350C1 |
| ГИДРОПРИВОД ЛЕТУЧЕЙ ПИЛЫ | 1999 |
|
RU2169660C2 |
| ПРИЦЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОГНЕМ КОРАБЕЛЬНОЙ МАЛОКАЛИБЕРНОЙ АРТУСТАНОВКИ | 2008 |
|
RU2368859C1 |
| СИСТЕМА УПРАВЛЕНИЯ СДВОЕННЫМ СООСНЫМ ПЛАВАЮЩИМ РАЗМАТЫВАТЕЛЕМ | 2008 |
|
RU2387511C1 |
| СПОСОБ ЗАЩИТЫ КОРАБЕЛЬНОГО РАКЕТНО-АРТИЛЛЕРИЙСКОГО КОМПЛЕКСА ОТ ВЛАГОРАЗРУШАЮЩИХ ФАКТОРОВ | 2000 |
|
RU2170404C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
| СПОСОБ УПЛОТНЕНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И ГЕРМЕТИЗИРУЮЩАЯ СМЕСЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2170751C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |



Изобретение относится к военной технике, в частности к способам управления скоростями и углами наведения артустановок. Техническим результатом является повышение динамических и точностных характеристик артустановки. Решение поставленной задачи обеспечивается тем, что в способе управления скоростью и углами наведения артустановки путем коррекции функций переменных его, обусловленной введением в контур следящей системы обратной связи по скорости вращения оси артустановки, в следящую систему дополнительно вводят динамическую местную обратную связь по давлению, суммируют ее сигнал с сигналом обратной связи по скорости и, исходя из устойчивости гидропривода, определяют коэффициент ввода сигнала по давлению при постоянной времени Тд, вдвое меньшей по отношению к постоянной времени гидропривода Тгп. Задача также решается за счет того, что в установке, содержащей гидронасос, соединенный силовыми магистралями с гидромотором, регулятор, включающий датчики рассогласования, установленные на оси вращения артустановки, введены подключенные на вход гидромотора индуктивные датчики по давлению, а также по месту установки датчиков рассогласования упругокомпенсирующее устройство. Задача также решается за счет того, что упругокомпенсирующее устройство выполнено из двух скрепленных промежуточной крестовой втулкой неподвижных дисков с расположенными в пазах втулки выступами на поверхности диска. Причем выступы подпружинены по боковым торцам. 2 с. и 1 з.п.ф-лы, 14 ил.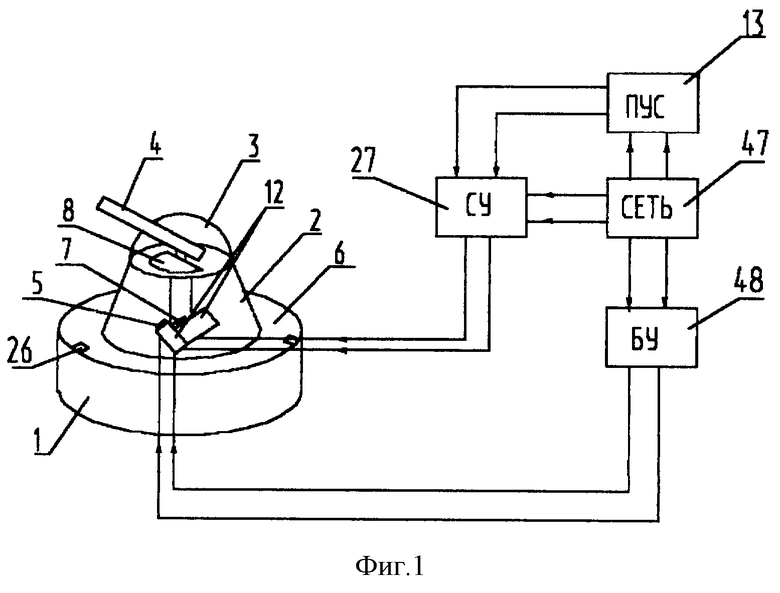
| ПРОМЕЖУТОЧНАЯ ОПОРА ДЛЯ КАНАТНОГО ТРАНСПОРТЕРА | 1923 |
|
SU630A1 |
| US 5210371 A, 11.05.1993 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО СКАНИРОВАНИЯ ПРИ СТРЕЛЬБЕ ИЗ РЕАКТИВНЫХ ПУСКОВЫХ УСТАНОВОК | 1998 |
|
RU2137080C1 |
| US 4440061, 03.04.1984. | |||
