Изобретение относится к области машиностроения и может быть использовано в высокоточных приводах слежения, наведения.
Известен регулируемый гидропривод с замкнутой схемой циркуляции рабочей жидкости (Под. ред. Прокофьева В.Н. Аксиально-поршневой регулируемый гидропривод. М.: Машиностроение, 1969 г., стр.257). В данном гидроприводе используются объемно-замкнутые между собой аксиально-поршневые гидромашины с наклонным блоком и двойным несиловым карданом. Насос переменной подачи приводится в действие приводным электродвигателем, а управление насосом осуществляется посредством электрогидравлического механизма управления с внутренней отрицательной обратной связью по положению его люльки. Электрический вход механизма управления является управляющим входом гидропривода. Гидромотор через редуктор приводит в движение объект регулирования. Гидропривод охвачен внешней отрицательной обратной связью по положению объекта регулирования.
Недостатком данного гидропривода является наличие значительной зоны нечувствительности из-за высокой инерционности регулирующего органа аксиально-поршневого насоса с наклонным блоком и двойным несиловым карданом.
Известен также электрогидравлический следящий привод (ЭГСП), принятый за прототип, изделие СП 190 (Руководство по эксплуатации АЮИЖ.461324.001 РЭ ОАО «ВНИИ «Сигнал» г. Ковров, 2005 г.). ЭГСП прототипа содержит гидравлически замкнутые между собой аксиально-поршневой гидромотор с наклонным блоком и двойным несиловым карданом (далее по тексту гидромотор АПНБ) и регулируемый аксиально-поршневой насос с наклонным диском и гидростатическими опорами (далее по тексту регулируемый насос АПНД) и с электрогидравлическим механизмом управления, приводной двигатель, механическую передачу, объект регулирования, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, первый и второй сумматоры, первый и второй датчики угла, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос АПНД и гидромотор АПНБ, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса и гидравлическим входом электрогидравлического механизма управления, вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, вал приводного двигателя кинематически соединен с входными валами регулируемого насоса АПНД и вспомогательного насоса, первый датчик угла кинематически соединен с выходным валом механической передачи и своим электрическим выходом соединен с вторым входом первого сумматора, первый вход которого является управляющим входом ЭГСП, второй датчик угла кинематически соединен с наклонным диском регулируемого насоса АПНД и своим электрическим выходом соединен с вторым входом второго сумматора, первый вход которого соединен с выходом первого сумматора, выход второго сумматора соединен с электрическим входом электрогидравлического механизма управления, вал гидромотора АПНБ через механическую передачу кинематически соединен с объектом регулирования.
Недостатком указанного ЭГСП является наличие значительной зоны нечувствительности к управляющему воздействию, так как требуется время для создания требуемого перепада давления на гидромоторе АПНБ при нарастании управляющего воздействия, что приводит к увеличению ошибки наведения объекта регулирования, особенно в начале его движения, а также при реверсе управляющего воздействия. Кроме того, в указанном ЭГСП используются разнотипные аксиально-поршневые гидромашины - регулируемый насос АПНД, гидромотор АПНБ, что снижает показатели унификации по изделию.
Изобретение направлено на уменьшение зоны нечувствительности ЭГСП и, как следствие, увеличение полосы пропускания при отработке управляющего воздействия с обеспечением унификации ходовых частей гидромашин ЭГСП - регулируемого насоса АПНД и аксиально-поршневого гидромотора (АПГМ) с наклонным диском и гидростатическими опорами.
Технический результат достигается тем, что электрогидравлический следящий привод, содержащий гидравлически замкнутые между собой АПГМ и регулируемый насос АПНД, электрогидравлический механизм управления, приводной двигатель, механическую передачу, объект регулирования, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, первый и второй сумматоры, первый и второй датчики угла, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос АПНД и АПГМ, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса и гидравлическим входом электрогидравлического механизма управления, вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, вал приводного двигателя кинематически соединен с входными валами регулируемого насоса АПНД и вспомогательного насоса, первый датчик угла кинематически соединен с выходным валом механической передачи и своим электрическим выходом соединен с вторым входом первого сумматора, первый вход которого является управляющим входом ЭГСП, второй датчик угла кинематически соединен с наклонным диском регулируемого насоса АПНД и своим электрическим выходом соединен с вторым входом второго сумматора, первый вход которого соединен с выходом первого сумматора, выход второго сумматора соединен с электрическим входом электрогидравлического механизма управления, отличается тем, что вал АПГМ через механическую передачу кинематически соединен с объектом регулирования, причем АПГМ выполнен с наклонным диском и гидростатическими опорами, при этом усилие R пружины, поджимающей блок цилиндров к распределителю, отвечает соотношению

где mц - масса блока цилиндров (без поршней);
a0 - проекция вибрационного ускорения на ось вала АПГМ с наклонным диском и гидростатическими опорами;
g0 - проекция ускорения свободного падения на ось вала АПГМ с наклонным диском и гидростатическими опорами;
Z - количество поршней и гидростатических опор в АПГМ с наклонным диском и гидростатическими опорами;
mп - масса одного поршня (без гидростатической опоры);
aпo - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала АПГМ с наклонным диском и гидростатическими опорами;
gпo - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала АПГМ с наклонным диском и гидростатическими опорами;
l1 - расстояние от центра тяжести блока цилиндров до его точки самоустановки;
Dц - внешний диаметр блока цилиндров, взаимодействующий с распределителем;
σр - удельное давление между блоком цилиндров и распределителем;
Sр - площадь контакта распределителя и блока цилиндров;
(a0+g0); (aпo+gпо) - суммы векторов ускорений, соответствующих обозначениям,
а суммарное усилие F пружин, поджимающих через сферическую втулку и сепаратор гидростатические опоры поршней к наклонному диску, отвечает соотношению

где mп - масса одного поршня (без гидростатической опоры);
m0 - масса гидростатической опоры;
aпд - проекция вибрационного ускорения на ось, перпендикулярную плоскости наклонного диска;
gпд - проекция ускорения свободного падения на ось, перпендикулярную плоскости наклонного диска;
ад - проекция вибрационного ускорения на плоскость наклонного диска;
gд - проекция ускорения свободного падения на плоскость наклонного диска;
l2 - расстояние от центра тяжести гидростатической опоры до центра ее сферической заделки;
d - внешний диаметр гидростатической опоры;
S0 - площадь гидростатической опоры, контактирующей с наклонным диском;
σ0 - удельное давление между гидростатической опорой и наклонным диском;
γ - угол наклона диска;
(aпд+gпд); (aд+gд) - суммы векторов ускорений, соответствующих обозначениям.
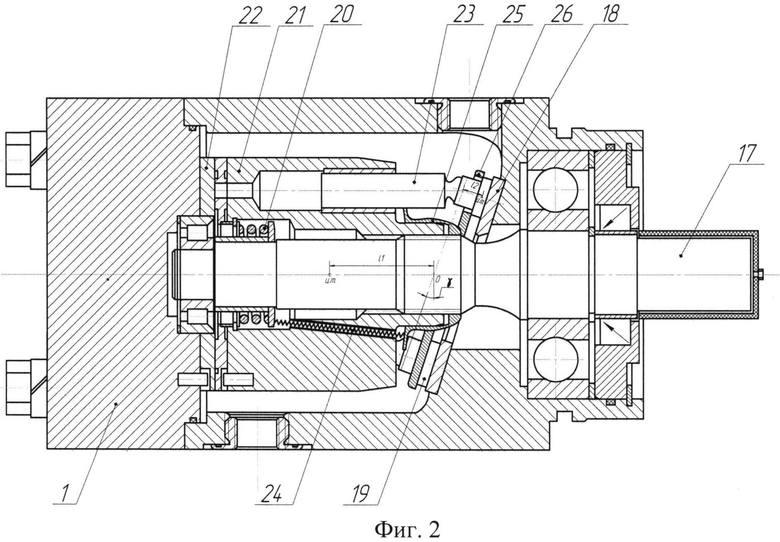
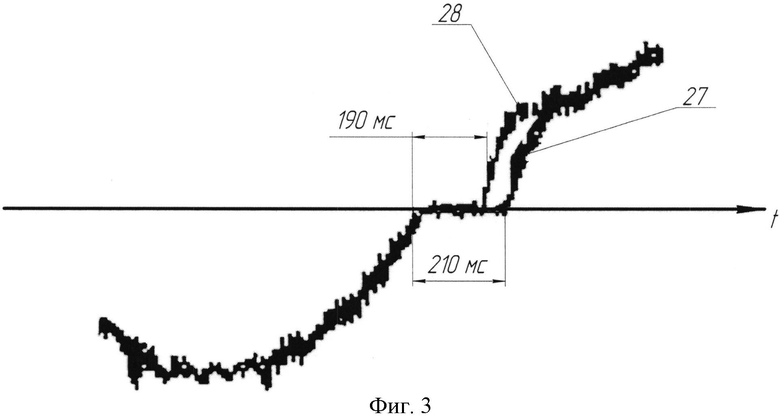
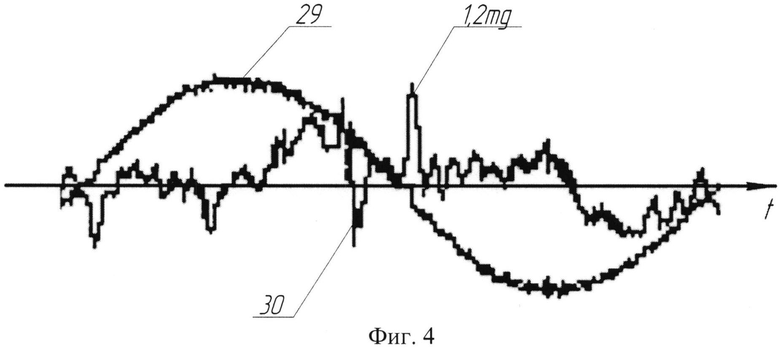
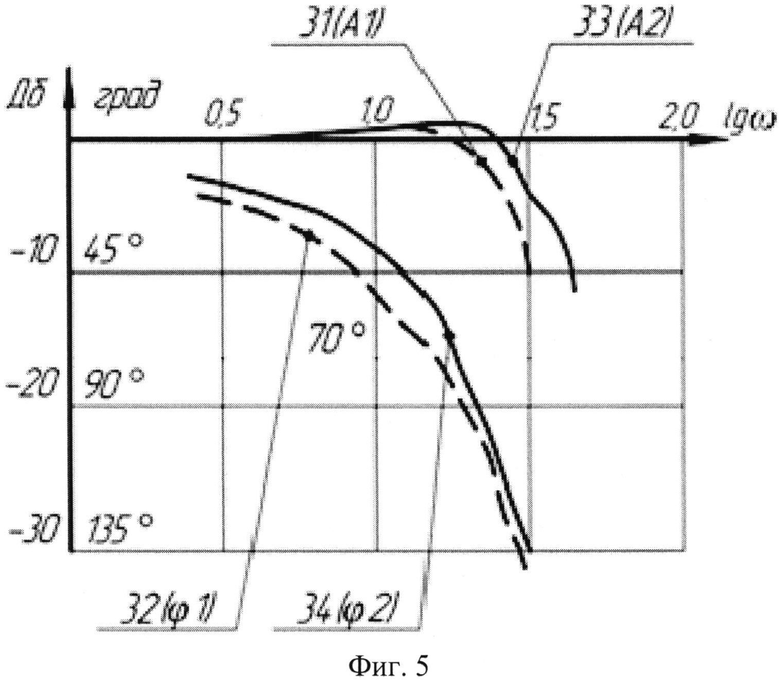
На фиг.1 приведена структурная схема ЭГСП, на фиг.2 - АПГМ с наклонным диском и гидростатическими опорами, на фиг.3 - фрагмент осциллограммы экспериментальных исследований ЭГСП по скорости нагрузки в режиме отработки синусоидального управляющего воздействия, на фиг.4 - осциллограмма экспериментальных исследований ЭГСП с указанием ошибки при отработке синусоидального управляющего воздействия, на фиг.5 - логарифмические амплитудно-фазовые частотные характеристики ЭГСП.
Электрогидравлический следящий привод (фиг.1) содержит гидравлически замкнутые между собой АПГМ 1 и регулируемый насос АПНД 2, электрогидравлический механизм управления 3, приводной двигатель 4, механическую передачу 5, объект регулирования 6, вспомогательный насос 7, предохранительный клапан 8, первый 9 и второй 10 подпиточные клапаны, пополнительный бак 11, первый 12 и второй 13 сумматоры, первый 14 и второй 15 датчики угла, при этом напорная гидролиния 16 вспомогательного насоса 7 соединена с входами первого 9 и второго 10 подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос АПНД 2 и АПГМ 1, выход предохранительного клапана 8 соединен с напорной гидролинией 16 вспомогательного насоса 7 и гидравлическим входом электрогидравлического механизма управления 3, вход вспомогательного насоса 7 и выход предохранительного клапана 8 соединены с пополнительным баком 11, вал приводного двигателя 4 кинематически соединен с входными валами регулируемого насоса АПНД 2 и вспомогательного насоса 7, датчик угла 14 кинематически соединен с выходным валом механической передачи 5 и своим электрическим выходом соединен с вторым входом первого сумматора 12, первый вход которого является управляющим входом ЭГСП, второй датчик угла 15 кинематически соединен с наклонным диском регулируемого насоса АПНД 2 и своим электрическим выходом соединен с вторым входом второго сумматора 13, первый вход которого соединен с выходом первого сумматора 12, выход второго сумматора 13 соединен с электрическим входом электрогидравлического механизма управления 3, вал 17 (фиг.2) АПГМ 1 через механическую передачу 5 (фиг.1) кинематически соединен с объектом регулирования 6, причем АПГМ 1 (фиг.2) выполнен с наклонным диском 18 и гидростатическими опорами 19, при этом усилие R пружины 20, поджимающей блок цилиндров 21 к распределителю 22, отвечает соотношению

где mц - масса блока цилиндров 21 (без поршней 23);
a0 - проекция вибрационного ускорения на ось вала 17 АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19;
g0 - проекция ускорения свободного падения на ось вала 17 АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19;
Z - количество поршней 23 и гидростатических опор 19 в АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19;
mп - масса одного поршня 23 (без гидростатической опоры 19);
aпo - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала 17 АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19;
gпo - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала 17 АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19;
l1 - расстояние от центра тяжести блока цилиндров 21 до его точки самоустановки;
Dц - внешний диаметр блока цилиндров 21, взаимодействующий с распределителем 22;
σр - удельное давление между блоком цилиндров 21 и распределителем 22;
Sp - площадь контакта распределителя 22 и блока цилиндров 21;
(a 0+g0); (a по+gпо) - суммы векторов ускорений, соответствующих обозначениям,
а суммарное усилие F пружин 24, поджимающих через сферическую втулку 25 и сепаратор 26 гидростатические опоры 19 поршней 23 к наклонному диску 27, отвечает соотношению

где mп - масса одного поршня 23 (без гидростатической опоры 19);
m0 - масса гидростатической опоры 19;
aпд - проекция вибрационного ускорения на ось, перпендикулярную плоскости наклонного диска 18;
gпд - проекция ускорения свободного падения на ось, перпендикулярную плоскости наклонного диска 18;
ад - проекция вибрационного ускорения на плоскость наклонного диска 27;
gд - проекция ускорения свободного падения на плоскость наклонного диска 18;
l2 - расстояние от центра тяжести гидростатической опоры 19 до центра ее сферической заделки 28;
d - внешний диаметр гидростатической опоры 19;
S0 - площадь гидростатической опоры 19, контактирующей с наклонным диском 18;
σ0 - удельное давление между гидростатической опорой 19 и наклонным диском 18;
γ - угол наклона диска 18;
(a пд+gпд); (a д+gд) - суммы векторов ускорений, соответствующих обозначениям.
При вращении валов насосов (фиг.1) регулируемого АПНД 2 и вспомогательного 7 от приводного двигателя 4 вспомогательный насос 7 подает рабочую жидкость из пополнительного бака 11 по напорной гидролинии 16 к входу предохранительного клапана 8, поддерживающему в ней постоянное давление, к гидравлическому входу электрогидравлического механизма управления 3, а также к входам первого 9 и второго 10 подпиточных клапанов для восполнения утечек в гидролиниях, соединяющих АПГМ 1 с наклонным диском 18 (фиг.2) и гидростатическими опорами 19 и регулируемый насос АПНД 2 (фиг.1).
При отсутствии управляющего сигнала Uупр на первом входе первого сумматора 12 на электрическом входе электрогидравлического механизма управления 3 формируется сигнал, при котором регулируемый насос АПНД 2 подачу рабочей жидкости не производит и вал 17 (фиг.2) АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 неподвижен.
На второй вход первого сумматора 12 (фиг.1) поступает сигнал с первого датчика угла 14, образуя с его первым входом, являющимся управляющим входом ЭГСП, внешнюю отрицательную обратную связь по положению объекта регулирования 6, при этом вход первого датчика угла 14 кинематически соединен с объектом регулирования 6.
На второй вход второго сумматора 13 поступает сигнал с второго датчика угла 15, образуя с его первым входом, являющимся управляющим входом электрогидравлического механизма управления 3, внутреннюю отрицательную обратную связь по положению наклонного диска в регулируемом насосе АПНД 2, при этом вход второго датчика угла 15 кинематически соединен с наклонным диском регулируемого насоса АПНД 2.
Таким образом, на электрическом входе электрогидравлического механизма управления 3 формируется управляющий сигнал, определяющий положение наклонного диска регулируемого насоса АПНД 2 и объекта регулирования 6.
При изменении управляющего воздействия Uупр на первом входе первого сумматора 12 пропорционально возрастает подача рабочей жидкости от регулируемого насоса АПНД 2 в одну из гидролиний, соединяющих АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 и регулируемый насос АПНД 2, появляется перепад давления между ними.
Величина перепада давления, обеспечивающего начало вращения вала АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19, определяется моментом сопротивления движению объекта регулирования 6, механической передачи 5 и, особенно, моментом сопротивления движению основных взаимно подвижных сопрягаемых деталей ходовой части АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 (фиг.2): блок цилиндров 21 - распределитель 22, гидростатические опоры 19 - наклонный диск 18.
Усилия поджатия пружин 20 и 24 задают величину минимального момента сопротивления движения между блоком цилиндров 21 и распределителем 22, гидростатическими опорами 19 и наклонным диском 18 с обеспечением работоспособности АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19. При этом усилие R пружины 20 определяется из соотношения

а усилие F пружин 24 из соотношения

Заданные таким образом значения усилий поджатия пружин 20 и 24 уменьшают в гидролиниях перепад давления, соответствующий началу вращения вала 17 АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19. Тем самым уменьшается угол наклона наклонного диска регулируемого насоса АПНД 2 (фиг.1), соответствующий началу вращения вала 17 (фиг.2) АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19, так как из-за уменьшения перепада давления уменьшается величина расхода утечек, сжимаемости, перетечек рабочей жидкости, формирующихся в регулируемом насосе АПНД 2 и АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19.
При вращении вала 17 гидромотора АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 (фиг.2) первый датчик угла 14 (фиг.1) формирует сигнал отрицательной обратной связи, поступающий на второй вход первого сумматора 12. Разность сигналов на входе первого сумматора 12 соответствует ошибке наведения, таким образом, сокращается время от начала подачи управляющего сигнала до угла поворота наклонного диска регулируемого насоса АПНД 2, при котором начинает вращение вал 17 (фиг.2) АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 и через механическую передачу 5 (фиг.1) начинает вращение объект регулирования 6. Тем самым уменьшается зона нечувствительности и ошибка отработки управляющего сигнала Uупр электрогидравлического следящего привода.
Уменьшение утечек, перетечек, сжимаемости рабочей жидкости, момента трения приводит к улучшению точностных и динамических характеристик, а согласование усилий в ходовой части АПГМ 1 с наклонным диском 18 и гидростатическими опорами 19 с динамическими характеристиками ЭГСП позволяет увеличить частоту пропускания при отработке управляющего сигнала Uyпp, что обеспечивает возможность использования аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами в ЭГСП.
В ОАО « ВНИИ «Сигнал» проведены испытания образцов электрогидравлических следящих приводов прототипа - изделия СП 190 и заявляемого привода. Осциллограммы результатов испытаний в составе следящего привода горизонтального наведения (ГН) изделия СП 190 показаны на фигурах 3, 4. Из осциллограмм (фиг.3): 27 - скорости вращения вала гидромотора АПНБ прототипа и 28 - вала 17 АПГМ с наклонным диском и гидростатическими опорами заявляемого электрогидравлического следящего привода ЭГСП следует, что при отработке одинаковых синусоидальных воздействий зона нечувствительности первого составляет 210 мс, а второго 190 мс, т.е. уменьшена на 10%, что обеспечило точность наведения в момент реверса скорости для заявляемого ЭГСП. На фиг.4 приведены осциллограммы: 29 - сигнала скорости объекта регулирования 6 и 30 - ошибки угла наведения объекта регулирования 6 при отработке управляющего воздействия с амплитудой 167 т.д. и периодом 6,3 сек привода горизонтального наведения изделия СП 190. Максимальная величина ошибки в момент реверса не более 1,2 т.д.
Показанные на фигуре 5 логарифмические амплитудно-частотные 31 (А1) и фазочастотные 32 (φ1) характеристики разомкнутого скоростного контура прототипа и соответствующие 33 (А2), 34 (φ2) характеристики заявляемого ЭГСП демонстрируют очевидное преимущество последнего. В полосе низких частот lgω=0,5 его фазовое 34 (φ2) запаздывание на 10° меньше, чем у штатного 32 (φ1) ЭГСП.
В зоне средних частот lgω=1-1,2, близких к частоте разомкнутого позиционного контура, фазовое 34 (φ2) запаздывание характеристики на 16°меньше относительно 32 (φ1).
В полосе частот lgω=1,4 амплитудная 32 (А2) характеристика ЭГСП с экспериментальным АПГМ с наклонным диском и гидростатическими опорами на 0,1 lgω проходит правее штатной 31 (А1).
Указанные преимущества по фазовой и амплитудной характеристикам позволяют сделать вывод о более широкой на 15-25% полосе пропускания заявляемого ЭГСП.
При унификации базовых составных частей исполнительных силовых элементов ЭГСП трудоемкость изготовления и стоимость АПГМ с наклонным диском и гидростатическими опорами заявляемого ЭГСП не менее чем на 30-40% меньше, чем у АПГМ с наклонным блоком и двойным несиловым карданом прототипа.
Замена в ЭГСП прототипа аксиально-поршневого гидромотора с наклонным блоком и двойным несиловым карданом на аксиально-поршневой гидромотор с наклонным диском и гидростатическими опорами заявляемого ЭГСП позволяет обеспечить унификацию гидромашин ЭГСП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2014 |
|
RU2561254C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2015 |
|
RU2593325C1 |
| Электрогидравлический привод | 2019 |
|
RU2708012C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2017 |
|
RU2646169C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2688783C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2667418C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2008 |
|
RU2372531C1 |
Привод предназначен для использования в высокоточных приводах слежения, наведения. Привод содержит гидравлически замкнутые между собой аксиально-поршневой гидромотор и регулируемый аксиально-поршневой насос с наклонным диском и гидростатическими опорами, электрогидравлический механизм управления, приводной двигатель, механическую передачу, объект регулирования, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, первый и второй сумматоры, первый и второй датчики угла, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос и гидромотор, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса и гидравлическим входом механизма управления, вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, вал приводного двигателя кинематически соединен с входными валами регулируемого насоса и вспомогательного насоса, первый датчик угла кинематически соединен с выходным валом механической передачи и своим электрическим выходом соединен с вторым входом первого сумматора, первый вход которого является управляющим входом привода, второй датчик угла кинематически соединен с наклонным диском регулируемого насоса и своим электрическим выходом соединен с вторым входом второго сумматора, первый вход которого соединен с выходом первого сумматора, выход второго сумматора соединен с электрическим входом механизма управления, вал гидромотора через механическую передачу кинематически соединен с объектом регулирования, причем гидромотор выполнен с наклонным диском и гидростатическими опорами. Технический результат - уменьшение зоны нечувствительности привода. 5 ил.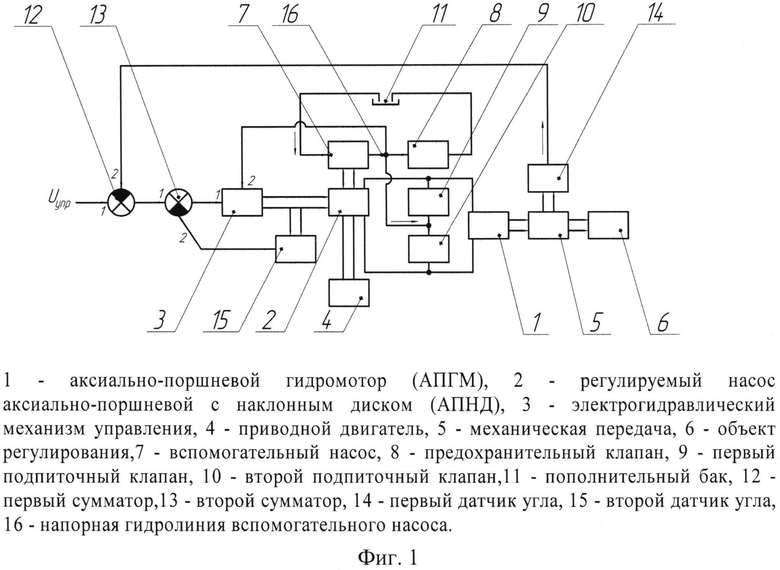
Электрогидравлический следящий привод, содержащий гидравлически замкнутые между собой аксиально-поршневой гидромотор и регулируемый аксиально-поршневой насос с наклонным диском и гидростатическими опорами, электрогидравлический механизм управления, приводной двигатель, механическую передачу, объект регулирования, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, первый и второй сумматоры, первый и второй датчики угла, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый аксиально-поршневой насос с наклонным диском и гидростатическими опорами и аксиально-поршневой гидромотор, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса и гидравлическим входом электрогидравлического механизма управления, вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, вал приводного двигателя кинематически соединен с входными валами регулируемого аксиально-поршневого насоса с наклонным диском и гидростатическими опорами и вспомогательного насоса, первый датчика угла кинематически соединен с выходным валом механической передачи и своим электрическим выходом соединен с вторым входом первого сумматора, первый вход которого является управляющим входом электрогидравлического следящего привода, второй датчика угла кинематически соединен с наклонным диском регулируемого аксиально-поршневого насоса с наклонным диском и гидростатическими опорами и своим электрическим выходом соединен с вторым входом второго сумматора, первый вход которого соединен с выходом первого сумматора, выход второго сумматора соединен с электрическим входом электрогидравлического механизма управления, вал аксиально-поршневого гидромотора через механическую передачу кинематически соединен с объектом регулирования, отличающийся тем, что аксиально-поршневой гидромотор выполнен с наклонным диском и гидростатическими опорами, при этом усилие R пружины, поджимающей блок цилиндров к распределителю, отвечает соотношению

где mц - масса блока цилиндров (без поршней);
а0 - проекция вибрационного ускорения на ось вала аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами;
g0 - проекция ускорения свободного падения на ось вала аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами;
Z - количество поршней и гидростатических опор в аксиально-поршневом гидромоторе с наклонным диском и гидростатическими опорами;
mп - масса одного поршня (без гидростатической опоры);
апо - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами;
gпo - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами;
l1 - расстояние от центра тяжести блока цилиндров до его точки самоустановки;
Dц - внешний диаметр блока цилиндров, взаимодействующий с распределителем;
σр - удельное давление между блоком цилиндров и распределителем;
Sp - площадь контакта распределителя и блока цилиндров;
(a0+g0); (aпо+gпo) - суммы векторов ускорений, соответствующих обозначениям,
а суммарное усилие F пружин, поджимающих через сферическую втулку и сепаратор гидростатические опоры поршней к наклонному диску, отвечает соотношению

где mп - масса одного поршня (без гидростатической опоры);
m0 - масса гидростатической опоры;
апд - проекция вибрационного ускорения на ось, перпендикулярную плоскости наклонного диска;
gпд - проекция ускорения свободного падения на ось, перпендикулярную плоскости наклонного диска;
ад - проекция вибрационного ускорения на плоскость наклонного диска;
gд - проекция ускорения свободного падения на плоскость наклонного диска;
l2 - расстояние от центра тяжести гидростатической опоры до центра ее сферической заделки;
d - внешний диаметр гидростатической опоры;
S0 - площадь гидростатической опоры, контактирующей с наклонным диском;
σ0 - удельное давление между гидростатической опорой и наклонным диском;
γ - угол наклона диска;
(aпд+gпд); (aд+gд) - суммы векторов ускорений, соответствующих обозначениям.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| US 5431182 A, 11.07.1995 | |||
| US 6512960 B1, 28.01.2003 | |||

