Изобретение относится к области корабельной артиллерии и может использоваться в качестве основного или резервного средства управления огнем корабельных малокалиберных зенитных артустановок.
Известны и широко применяются на кораблях для управления огнем малокалиберных артустановок (АУ) прицельные устройства в виде палубной визирной колонки (ВК) с кольцевым прицелом, обслуживаемой оператором-наводчиком. Наведение АУ на цель при управлении от ВК производится дистанционно путем синхронного отслеживания приводами вертикального и горизонтального наведения АУ положений датчика угла места, установленного вместе с кольцевым прицелом на качающейся части ВК, и датчика курсового угла, установленного на вращающейся части ВК, соответственно. Достоинством визирной колонки является быстрая реакция на возникшую угрозу, техническая простота, экономичность и надежность в эксплуатации.
В соответствии с «Правилами стрельбы корабельной артиллерии малого калибра с кольцевыми прицелами» (ПАС №В-6, часть V, Военное издательство МО СССР, 1958, стр.5-9) функции оператора-наводчика ВК включают:
- визуальный поиск и выбор цели;
- идентификацию типа цели;
- глазомерное определение дальности и ракурса цели;
- определение скорости цели, исходя из типа цели и опыта предыдущих стрельб;
- выбор ракурсного кольца визирования цели, исходя из глазомерно определенных дальности, ракурса цели и ее предполагаемой скорости (в случае изменения ракурса или скорости цели - приведение на цель нового ракурсного кольца);
- удержание точки визирования цели на ракурсном кольце в угловом секторе, определяющем углы упреждения АУ по вертикали и горизонту;
- выбор способа стрельбы и назначения момента открытия огня.
Все перечисленные действия оператор-наводчик ВК выполняет стоя на палубе движущегося и качающегося корабля.
Результативность стрельбы при управлении АУ от ВК полностью зависит от уровня подготовки оператора-наводчика, его физических и мнемонических способностей. Наиболее сложной задачей при этом является правильное определение оператором-наводчиком углов упреждения АУ. В целях снижения возможной ошибки стрельбы практикуется снаряжение боеприпасной ленты АУ трассирующими снарядами в расчете на корректировку оператором-наводчиком установок орудия по результатам наблюдения отклонений трасс относительно цели. Однако корректировка по трассам, во-первых, реализуема только при наличии в боекомплекте АУ трассирующего боеприпаса, а во-вторых, не позволяет повысить прицельность первых очередей и может дать эффект только при наличии резерва времени на пристрелку. Основным недостатком наведения АУ с помощью визирной колонки является негарантируемая точность стрельбы, существенно зависящая от внешних условий и от человеческого фактора.
Техническим результатом применения предлагаемого прицельного устройства является повышение точности и стабильности стрельбы АУ при наведении от ВК за счет инструментального определения параметров движения цели (дальности, курса, скорости) и автоматизации определения углов упреждения в процессе сопровождения цели. Одновременно облегчается работа оператора-наводчика ВК, из функций которого исключаются наиболее проблемные глазомерные и мнемонические операции.
Указанный результат достигается тем, что в прицельное устройство, содержащее обслуживаемую оператором-наводчиком палубную визирную колонку (ВК), состоящую из вращающейся части, размещенной на вертикальной оси неподвижного основания, на которой установлен датчик положения ВК по курсовому углу, качающейся части, на которой установлены кольцевой прицел и датчик положения ВК по углу места, введены на качающейся части ВК лазерный бинокль-дальномер, устанавливаемый соосно с кольцевым прицелом, и датчик угловой скорости ВК по углу места, а на вращающейся части датчик угловой скорости ВК по курсовому углу также введены построитель углов упреждения АУ по вертикали и горизонту, формирователь полного угла вертикального наведения АУ и формирователь полного угла горизонтального наведения АУ, причем выходы лазерного дальномера и датчиков угловых скоростей ВК по углу места и курсовому углу соединены с соответствующими тремя входами построителя углов упреждения АУ по вертикали и горизонту, выход которого «по углу упреждения по вертикали» соединен с входом формирователя полного угла вертикального наведения АУ, а выход «по углу упреждения по горизонту» - с входом формирователя полного угла горизонтального наведения АУ, второй вход формирователя полного угла вертикального наведения АУ соединен с датчиком угла места ВК, а выход формирователя полного угла вертикального наведения АУ соединен с приводом вертикального наведения АУ, второй вход формирователя полного угла горизонтального наведения АУ соединен с датчиком положения ВК по курсовому углу, а выход указанного формирователя соединен с приводом горизонтального наведения АУ.
При этом построитель углов упреждения АУ по вертикали и горизонту состоит из блока определения радиальной скорости цели с встроенным электронным хронометром, блока выработки текущей (сглаженной) дальности до цели, блока решения задачи встречи, блока вычисления угла прицеливания, блока вычисления поправочного коэффициента, блока выработки составляющей угла упреждения по вертикали, обусловленной угловой скоростью наведения ВК по углу места, формирователя угла упреждения АУ по вертикали и формирователя угла упреждения АУ по горизонту, причем вход блока определения радиальной скорости цели и вход блока выработки текущей (сглаженной) дальности до цели соединены с выходом лазерного дальномера ВК, второй вход блока выработки текущей (сглаженной) дальности до цели соединен с выходом блока определения радиальной скорости цели, который одновременно соединен с одним из входов блока решения задачи встречи, выход блока выработки текущей (сглаженной) дальности до цели соединен с другим входом блока решения задачи встречи и одновременно с одним из входов блока вычисления поправочного коэффициента, выход блока решения задачи встречи (упрежденная дальность) соединен с входом блока вычисления угла прицеливания и со вторым входом блока вычисления поправочного коэффициента, а выход блока решения задачи встречи (полетное время) соединен с одним из входов формирователя угла упреждения АУ по горизонту и с одним из входов блока выработки составляющей угла упреждения по вертикали, выход блока вычисления поправочного коэффициента соединен со вторым входом формирователя угла упреждения АУ по горизонту и со вторым входом блока выработки составляющей угла упреждения по вертикали, третий вход формирователя угла упреждения АУ по горизонту соединен с выходом датчика угловой скорости ВК по курсовому углу, а третий вход блока выработки составляющей угла упреждения по вертикали соединен с выходом датчика угловой скорости ВК по углу места, выход блока выработки составляющей угла упреждения по вертикали соединен с одним из входов формирователя угла упреждения АУ по вертикали, другой вход которого соединен с выходом блока вычисления угла прицеливания, а выход которого соединен с формирователем полного угла вертикального наведения АУ, выход формирователя угла упреждения АУ по горизонту соединен с входом формирователя полного угла горизонтального наведения АУ.
Построитель углов упреждения может быть реализован как на дискретных аналоговых элементах, так и на спецвычислителе, запрограммированном в соответствии с приведенным алгоритмом работы построителя.
Фиг.1 представляет собой структурную схему прицельного устройства для управления огнем корабельной малокалиберной артустановки.
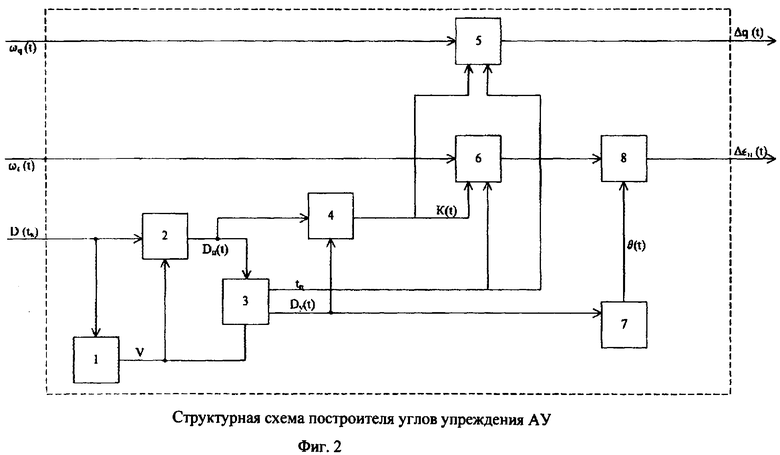
На Фиг.2 приведена структурная схема построителя углов упреждения АУ по вертикали и горизонту.
Прицельное устройство для управления огнем корабельной малокалиберной артустановки содержит:
1 - лазерный бинокль-дальномер, устанавливаемый на качающейся части ВК соосно со штатным кольцевым прицелом;
2 - датчик угловой скорости поворота ВК по углу места, устанавливаемый на качающейся части ВК;
3 - штатный датчик положения ВК по углу места;
4 - датчик угловой скорости поворота ВК по курсовому углу, устанавливаемый на вращающейся части ВК;
5 - штатный датчик положения ВК по курсовому углу;
6 - построитель углов упреждения АУ по вертикали и горизонту;
7 - формирователь полного угла вертикального наведения (ПУВН)АУ;
8 - формирователь полного угла горизонтального наведения (ПУГН) АУ;
9 - привод вертикального наведения АУ;
10 - привод горизонтального наведения АУ.
Построитель углов упреждения АУ по вертикали и горизонту содержит:
блок определения радиальной скорости сопровождаемой цели с встроенным электронным хронометром;
блок выработки текущей дальности цели;
блок решения задачи встречи;
блок вычисления поправочного коэффициента;
формирователь угла упреждения АУ по горизонту;
блок выработки составляющей угла упреждения АУ по вертикали, обусловленной угловой скоростью наведения ВК по углу места;
блок вычисления угла прицеливания АУ;
формирователь угла упреждения АУ по вертикали.
Наведение АУ с использованием предлагаемого прицельного устройства осуществляется следующим образом.
Обнаружив и выбрав цель, оператор-наводчик, используя, как обычно, штатный кольцевой прицел, наводит на цель ВК с установленными на ней функциональными устройствами и включает приводы наведения АУ по вертикали и горизонту. При этом, на привод 9 наведения АУ по вертикали поступает сигнал εц(t) с датчика 3 угла места ВК, прошедший без изменения через формирователь 7 ПУВН, а на привод 10 наведения АУ по горизонту - сигнал qц(t) с датчика 5 курсового угла ВК, прошедший без изменения через формирователь 8 ПУГН. В результате ствол АУ начинает, как обычно, синхронно отслеживать угловое положение ВК по сигналам εц(t) и qц(t) со штатных датчиков 3 и 5 ВК.
Далее оператор-наводчик ВК, пользуясь биноклем лазерного дальномера 1, сопровождает выбранную цель по углам, выдавая сигнал (команду) на излучение лазерному дальномеру в моменты совпадения цели с перекрестием в поле зрения бинокля (накрытие цели перекрестием гарантирует наличие лазерного контакта с ней). Дискретные значения дальности D(tк) цели поступают с лазерного бинокля-дальномера 1 в построитель 6, куда непрерывно поступают также сигналы ωε(t) и ωq(t) с датчиков угловых скоростей 2 и 4 ВК.
Построитель 6 на основе поступающих на него сигналов D(tк), ωε(t) и ωq(t) вырабатывает углы упреждения по вертикали Δεц(t) и по горизонту Δqц(t), суммируемые далее с углом места εц(t) и курсовым углом qц(t), поступающими с соответствующих штатных датчиков ВК, в формирователях 7 и 8 соответственно для формирования ПУВН и ПУГН приводов наведения АУ. В отдельных случаях (при значительных отстояниях АУ от ВК) на сумматоры формирователей 7 и 8 могут подаваться также сигналы с паралаксеров, учитывающие отстояния АУ от ВК в горизонтальной и вертикальной плоскостях.
Структурная схема построителя 6 углов упреждения АУ по вертикали Δεц(t) и по горизонту Δqц(t) приведена на Фиг.2.
Функционирование построителя углов упреждения АУ осуществляется следующим образом.
Мгновенные (дискретные) значения дальности D(tк) до цели поступают последовательно (в темпе измерений) с выхода лазерного дальномера 1 на вход блока определения радиальной скорости сопровождаемой цели с встроенным электронным хронометром.
Радиальная скорость V сопровождаемой цели определяется в соответствии с соотношением:
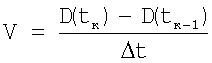 ,
,
где
D(tк) - значение дальности до цели, измеренное в момент времени tк;
D(tк-1) - предыдущее значение дальности до цели, измеренное в момент времени tк-1;
Δt=tк-tк-1 - интервал времени между замерами, определенный с помощью встроенного электронного хронометра.
Одновременно дальность D(tк) поступает на вход блока выработки текущей дальности цели, где с использованием скорости V с выхода блока определения радиальной скорости сопровождаемой цели с встроенным хронометром производится ее экстраполяция и выработка текущей (сглаженной) дальности Dц сопровождаемой цели.
Сглаженная дальность Dц(t) с выхода датчика угловой скорости поворота ВК по углу места 2 и радиальная скорость V цели с выхода блока определения радиальной скорости сопровождаемой цели с встроенным хронометром поступают на блок решения задачи встречи, в котором с использованием баллистической кривой обслуживаемой АУ определяются упрежденная дальность Dу(t) и время tп полета снаряда на дальность Dу.
Упрежденная дальность Dу(t) с выхода блока решения задачи встречи поступает на блок вычисления угла прицеливания АУ, в котором, с использованием баллистических данных обслуживаемой АУ, вырабатывается значение угла θ(t) прицеливания АУ для дальности Dу(t).
В блоке вычисления поправочного коэффициента на основе поступающих на него значений текущей дальности Dц(t) сопровождаемой цели с выхода блока выработки текущей дальности цели и упрежденной дальности Dу(t) с выхода блока решения задачи встречи вычисляется поправочный коэффициент K(t)=Dц(t)/Dу(t), используемый далее в датчике положения ВК по курсовому углу 5 и построителе углов упреждения АУ по вертикали и горизонту 6 при определении углов упреждения АУ.
Угол упреждения АУ Δq(t) по горизонту вычисляется в блоке формирователя угла упреждения АУ по горизонту, на входы которого поступают сигнал ωq(t) с выхода датчика угловой скорости ВК по курсовому углу, время tп полета снаряда на дальность Dу(t) с выхода блока решения задачи встречи и поправочный коэффициент K(t) с выхода блока вычисления поправочного коэффициента (Δq(t)=K(t)·ωq(t)·tп).
Угол упреждения АУ по вертикали Δε(t) вычисляется формирователем угла упреждения АУ по вертикали путем суммирования составляющей упреждения, обусловленной угловой скоростью наведения ВК по углу места, поступающей с выхода блока выработки составляющей угла упреждения АУ по вертикали, и угла прицеливания θ(t) с выхода блока вычисления угла прицеливания АУ. Вышеуказанная составляющая упреждения определяется в блоке 6, на входы которого поступают сигнал ωε(t) с выхода датчика угловой скорости ВК по углу места, время tп полета снаряда на дальность Dу(t) с выхода блока решения задачи встречи и поправочный коэффициент K(t) с выхода блока вычисления поправочного коэффициента
Δε(t)=K(t)·ωε(t)·tп+θ(t).
Углы упреждения по вертикали Δε(t) с выхода формирователя угла упреждения АУ по вертикали и по горизонту Δq(t) с выхода блока вычисления угла прицеливания АУ поступают далее на формирователи ПУВН и ПУГН.
Примечание: При необходимости учета в ПУВН и ПУГН поправок на параллакс (при значительных отстояниях АУ от ВК) эти поправки могут быть определены на основе текущих значений εц(t) и qц(t) с датчиков углового положения ВК, упрежденной дальности Dу(t) с выхода блока решения задачи встречи и отстояний АУ от ВК в вертикальной и горизонтальной плоскостях на конкретном проекте корабля (на схеме Фиг.2 не показано).
Как следует из приведенного описания работы построителя, необходимым условием выработки в нем углов упреждения АУ является получение по крайней мере двух дискретных значений дальности D(tк) сопровождаемой цели с лазерного дальномера для определения радиальной скорости V и текущей (сглаженной) дальности Dц(t) до цели. В случае невозможности выполнения данного условия (например, по причине неисправности лазерного бинокля-дальномера) в предлагаемом прицельном устройстве сохраняется возможность наведения АУ от ВК с использованием кольцевого прицела в соответствии с обычным (штатным) режимом применения ныне существующей ВК. Таким образом, использование предлагаемого прицельного устройства обеспечивает повышение точности стрельбы артустановки, упрощение функций оператора-наводчика ВК и не снижает надежности применения оружия, обеспечиваемой штатной визирной колонкой. При этом, предлагаемое прицельное устройство, как и штатная визирная колонка, не требует для своего функционирования специальных обеспечивающих средств - корабельной системы гиростабилизации, курсоуказания и измерения скорости хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗИРНО-ДАЛЬНОМЕРНОЕ УСТРОЙСТВО РУЧНОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ, СОПРЯГАЕМОЕ С ПРИБОРОМ УПРАВЛЕНИЯ СТРЕЛЬБОЙ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ И СПОСОБ УТОЧНЕНИЯ ТЕКУЩИХ КООРДИНАТ СОПРОВОЖДАЕМОЙ В РУЧНОМ РЕЖИМЕ ЦЕЛИ | 2010 |
|
RU2426058C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ С АВТОМАТОМ КОРРЕКТИРОВАНИЯ СТРЕЛЬБЫ | 2008 |
|
RU2363910C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ И КОМПЛЕКС УПРАВЛЕНИЯ ОГНЕМ ТАНКОВОГО ОРУДИЯ | 2006 |
|
RU2349863C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
Изобретение относится к области корабельной артиллерии и может использоваться для наведения и управления огнем корабельной малокалиберной артустановки (АУ) оператором-наводчиком палубной визирной колонки (ВК) с кольцевым прицелом. Устройство содержит обслуживаемую оператором-наводчиком палубную визирную колонку (ВК), состоящую из вращающейся части и качающейся части, построитель углов упреждения АУ по вертикали и горизонту, формирователь полного угла вертикального наведения АУ и формирователь полного угла горизонтального наведения АУ. Вращающаяся часть размещена на вертикальной оси неподвижного основания, на качающуюся часть установлены кольцевой прицел и датчик положения ВК по углу места (3). Качающаяся часть ВК содержит лазерный бинокль-дальномер (1), установленный соосно с кольцевым прицелом, и датчик угловой скорости ВК по углу места (2), а вращающаяся часть - датчик угловой скорости ВК по курсовому углу (4). Технический результат состоит в повышении точности и стабильности стрельбы АУ. 1 з.п. ф-лы, 2 ил.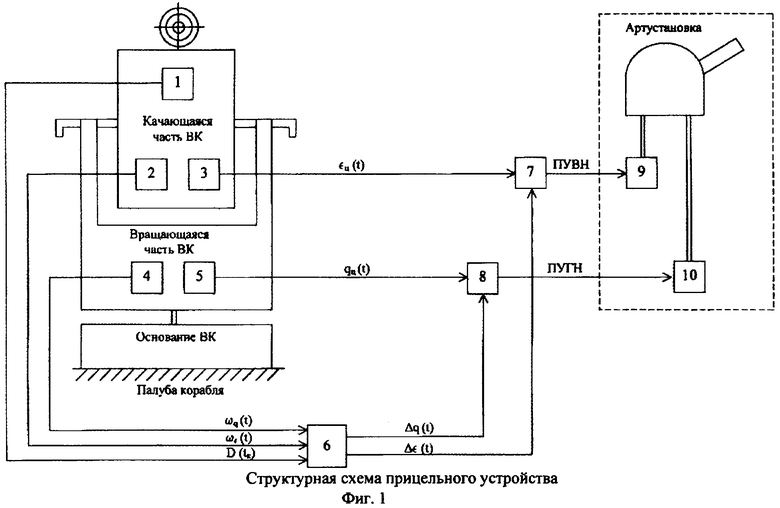
1. Прицельное устройство для управления огнем корабельной малокалиберной артустановки (АУ), содержащее обслуживаемую оператором-наводчиком палубную визирную колонку (ВК), состоящую из вращающейся части, размещенной на вертикальной оси неподвижного основания, на которой установлен датчик положения ВК по курсовому углу и датчик угловой скорости ВК по курсовому углу, и качающейся части с установленными на ней кольцевым прицелом, лазерным биноклем-дальномером, установленным соосно с кольцевым прицелом, датчиком положения ВК по углу места и датчиком угловой скорости ВК по углу места, построитель углов упреждения АУ по вертикали и горизонту, формирователь полного угла вертикального наведения АУ и формирователь полного угла горизонтального наведения АУ, причем выходы лазерного дальномера и датчиков угловых скоростей ВК по углу места и курсовому углу соединены с соответствующими тремя входами построителя углов упреждения АУ по вертикали и горизонту, выход которого «по углу упреждения по вертикали» соединен с входом формирователя полного угла вертикального наведения АУ, а выход «по углу упреждения по горизонту» - с входом формирователя полного угла горизонтального наведения АУ, второй вход формирователя полного угла вертикального наведения АУ соединен с датчиком угла места ВК, а выход формирователя полного угла вертикального наведения АУ соединен с приводом вертикального наведения АУ, второй вход формирователя полного угла горизонтального наведения АУ соединен с датчиком положения ВК по курсовому углу, а выход указанного формирователя соединен с приводом горизонтального наведения АУ.
2. Прицельное устройство по п.1, отличающееся тем, что построитель углов упреждения АУ по вертикали и горизонту состоит из блока определения радиальной скорости цели с встроенным электронным хронометром, блока выработки текущей дальности до цели, блока решения задачи встречи, блока вычисления угла прицеливания, блока вычисления поправочного коэффициента, блока выработки составляющей угла упреждения по вертикали, обусловленной угловой скоростью наведения ВК по углу места, формирователя угла упреждения АУ по вертикали и формирователя угла упреждения АУ по горизонту, причем вход блока определения радиальной скорости цели и вход блока выработки текущей дальности до цели соединены с выходом лазерного дальномера ВК, второй вход блока выработки текущей дальности до цели соединен с выходом блока определения радиальной скорости цели, который одновременно соединен с одним из входов блока решения задачи встречи, выход блока выработки текущей дальности до цели соединен с другим входом блока решения задачи встречи и одновременно с одним из входов блока вычисления поправочного коэффициента, выход блока решения задачи встречи «формирование упрежденной дальности» соединен с входом блока вычисления угла прицеливания и со вторым входом блока вычисления поправочного коэффициента, а выход блока решения задачи встречи «вычисление полетного времени» соединен с одним из входов формирователя угла упреждения АУ по горизонту и с одним из входов блока выработки составляющей угла упреждения по вертикали, выход блока вычисления поправочного коэффициента соединен со вторым входом формирователя угла упреждения АУ по горизонту и со вторым входом блока выработки составляющей угла упреждения по вертикали, третий вход формирователя угла упреждения АУ по горизонту соединен с выходом датчика угловой скорости ВК по курсовому углу, а третий вход блока выработки составляющей угла упреждения по вертикали соединен с выходом датчика угловой скорости ВК по углу места, выход блока выработки составляющей угла упреждения по вертикали соединен с одним из входов формирователя угла упреждения АУ по вертикали, другой вход которого соединен с выходом блока вычисления угла прицеливания, а выход которого соединен с формирователем полного угла вертикального наведения АУ, выход формирователя угла упреждения АУ по горизонту соединен с входом формирователя полного угла горизонтального наведения АУ.
| RU 94005576 С2, 10.05.1997 | |||
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ СТРЕЛЬБОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ (АУ) | 2004 |
|
RU2287761C2 |
| DE 3332795 A1, 28.03.1985. | |||

