Изобретение относится к области радиотехники и может быть использовано для измерения координат и параметров движения нескольких целей, в том числе целей из состава групповой.
Известен способ пеленгации цели из состава групповой [1]. Для этого с помощью линзовой антенны с четырьмя облучателями формируют в каждой плоскости пеленгации две диаграммы направленности антенны (ДНА) на излучение, смещенные относительно равносигнального направления, совпадающие с ДНА, образующими суммарные и разностные ДНА на прием в этих плоскостях; с помощью двух передатчиков формируют зондирующие сигналы (ЗС) с различными несущими частотами (либо со сдвигом во времени); с помощью двойного балансного моста и двух (одного в случае временного сдвига ЗС) приемников осуществляют суммарно-разностную обработку принятых антенной радиолокационных сигналов (РЛ-сигналов); вычисляют разность сигналов ошибок на выходах приемников (выходе приемника в соответствующие моменты времени). На тех временных промежутках, на которых указанная разность равна нулю, сигнал ошибки пропускают на вход устройства управления приводом антенны. В моменты времени, когда разность не равна нулю, сигнал на входе устройства управления приводом не меняют. В случае ручного управления приводом антенны сумму и разность сигналов ошибок подают на входы горизонтальной и вертикальной развертки осциллографа, что позволяет оператору сопровождать крайние цели группы.
Данный способ имеет ряд недостатков, а именно:
- в случае ручного управления приводом он обеспечивает измерение только углового положения и только крайних целей из состава групповой; в случае автоматического управления приводом процесс измерения фактически прекращается на временных промежутках, когда принятый РЛ-сигнал сформирован групповой целью;
- наличие шумовых помех с пространственной или временной корреляцией не может быть учтено в процессе пеленгации.
Также известен измеритель пеленга цели в присутствии цели-ловушки (далее - радиолокационной ловушки (РЛЛ)) [2]. В данном устройстве для подавления импульсной помехи от РЛЛ, поступающей по основному лепестку ДНА, осуществляют моноимпульсную суммарно-разностную обработку и синхронное детектирование принятого антенной РЛ-сигнала, по неортогональности суммарного и сдвинутого по фазе на 90o разностного сигнала обнаруживают наличие РЛЛ и при наличии РЛЛ селектируют полезный и помеховый сигналы. Селекцию выполняют после приема пачки импульсов, полученной при плавном изменении с помощью управляемого фазовращателя нуля разностной ДНА от крайне левого до крайне правого углового положения. При совпадении в момент времени t1 [2] нуля разностной ДНА с угловым положением цели, а в момент времени t3 [2] - с положением РЛЛ в разностном канале осуществляют обработку только РЛ-сигнала, сформированного РЛЛ, или только РЛ-сигнала, сформированного целью. При наличии различий в структуре сигналов, сформированных целью и РЛЛ, выделяют момент времени t3, в который селектор импульсов пропускает сигнал с выхода синхронного детектора.
Данное техническое решение имеет следующие недостатки:
- возможно измерение только углового положения только одной цели при наличии только одной РЛЛ;
- пеленгация цели возможна только при наличии различий в структурах РЛ-сигналов, сформированных целью и РЛЛ;
- присутствие в момент времени t3 помехового сигнала в суммарном канале при нормировке амплитуд сигналов суммарного и разностного каналов существенно искажает результаты измерений пеленга цели, особенно при большой (по сравнению с целью) эффективной поверхности рассеивания РЛЛ;
- наличие шумовых помех с пространственной или временной корреляцией не может быть учтено в процессе измерения пеленга цели.
Наиболее близким техническим решением, выбранным в качестве прототипа, является дискриминаторный способ измерения параметров РЛ-сигналов в условиях, когда принимаемый на фоне шумовых гауссовских помех РЛ-сигнал сформирован одиночной целью [3].
В способе-прототипе в качестве модели принимаемого РЛ-сигнала выбирают РЛ-сигнал, сформированный точечной целью, имеющий случайные амплитуду и начальную фазу, а элементами вектора измеряемых (информативных) параметров выбирают неизвестные неэнергетические параметры, такие как дальность до цели (время задержки импульсного РЛ-сигнала), ее угловые координаты и радиальную скорость (частоту Доплера) [3].
Для формирования выходного эффекта обобщенного дискриминатора первого вида в прототипе выделяют комплексные огибающие (КО) сигналов на выходах элементов антенной решетки (АР) и вычисляют значение градиента квадрата модуля комплексного весового интеграла в точке текущей оценки вектора измеряемых параметров [3].
Корреляционную матрицу ошибок измерения в способе-прототипе вычисляют как обратную к помноженному на отношение сигнал/шум (параметр обнаружения) и на -1 значению матрицы Гесса нормированной функции рассогласования в точке измеренного значения вектора измеряемых параметров [3].
Недостатками способа-прототипа являются:
- необходимость определения посторонними способами параметра обнаружения (для вычисления модуля комплексного весового интеграла и корреляционной матрицы ошибок измерения);
- неопределенность выражения для вычисления корреляционной матрицы ошибок измерения, так как в способе-прототипе непосредственно измеренное значение вектора измеряемых параметров неизвестно (известна только величина, пропорциональная вектору невязки, причем коэффициентом пропорциональности служит матрица, обратная самой матрице ошибок измерения);
- необоснованность способа при невозможности предварительной селекции КО требуемого РЛ-сигнала из смеси РЛ-сигналов, сформированных несколькими целями (групповая цель), что приводит к сопровождению "кажущегося" центра групповой цели, то есть к существенному снижению точности сопровождения, особенно в случае, когда потенциальная точность измерений много лучше разрешающей способности (большое отношение сигнал/шум).
Последний недостаток является принципиально неустранимым в рамках способа-прототипа.
Предлагаемое техническое решение направлено на повышение точности измерения координат и параметров движения каждой из нескольких целей в составе групповой при известном количестве облучаемых целей в заданной области пространства и наличии аддитивных шумовых гауссовских помех с известной пространственно-временной корреляцией.
Технический результат, который может быть получен в результате осуществления предлагаемого технического решения, заключается в расширении функциональных возможностей координаторов целей, использующих радиотехнические измерительные устройства, а именно появление возможностей:
- сопровождения нескольких целей в том случае, когда некоторые из них не разрешаются;
- сопровождения целей, использующих активные и пассивные РЛЛ;
- сопровождения целей при одновременном сопровождении отделяющихся от них элементов ракетного вооружения;
- использования ЗС и АР со значительно более "широкими" телами неопределенностей (функциями рассогласования) без ухудшения разрешающей способности.
Как и в способе-прототипе, в предлагаемом способе измерения параметров РЛ-сигналов на фоне шумовых гауссовских помех выделяют КО сигналов на выходах элементов АР, элементами вектора измеряемых параметров выбирают дальность, угловые координаты и радиальную скорость цели, формирующей радиолокационный сигнал со случайной начальной фазой, но принимают РЛ-сигнал, сформированный групповой целью (n одиночных целей (n = 2, 3, ...)) и вектор измеряемых параметров расширяют так, что его элементами являются неизвестные дальности, угловые положения, радиальные скорости n облучаемых целей, а также неизвестные амплитуды сформированных ими РЛ-сигналов.
Для формирования выходного эффекта обобщенного дискриминатора первого вида в точке текущей оценки расширенного вектора измеряемых параметров вычисляют значение градиента натурального логарифма условного отношения правдоподобия.
Вместе с тем корреляционную матрицу ошибок измерения вычисляют как обратную к помноженному на -1 значению матрицы Гесса натурального логарифма условного отношения правдоподобия в точке текущей оценки расширенного вектора измеряемых параметров.
То есть в предлагаемом техническом решении вектор измеряемых параметров α и вектор неизмеряемых (неинформативных) параметров γ выбирают в виде
γT = [ϕ1 ... ϕn]T = [γ1 ... γn]T,
где D1, ..., Dn - измеряемые дальности до n облучаемых целей;
ε1, ... , εn и β1, ... , βn - измеряемые угловые положения n облучаемых целей в ортогональных плоскостях пеленгации;
Vr1, ..., Vrn - измеряемые радиальные скорости n облучаемых целей;
b1, . .., bn - измеряемые амплитуды РЛ-сигналов, сформированных n облучаемыми целями;
ϕ1, ... , ϕn - случайные равномерно распределенные начальные фазы РЛ-сигналов, сформированных n облучаемыми целями.
В том случае, когда какие-то из информативных параметров известны, они исключаются из вектора α, соответственно его размерность уменьшается.
Выходной эффект Δ обобщенного дискриминатора первого вида в предлагаемом техническом решении формируют согласно зависимости
где
условное отношение правдоподобия Y(t) (являющееся скалярной функцией, зависящей от вектора измеряемых параметров α);
весовой интеграл;
i=1,..., n;
- параметр обнаружения; - модель РЛ-сигнала, сформированного i-й точечной целью (вектор-столбец, образованный КО сигналов на выходах элементов АР при приеме РЛ-сигнала, сформированного i-й точечной целью, в отсутствие помех);
- модель РЛ-сигнала, сформированного i-й точечной целью (вектор-столбец, образованный КО сигналов на выходах элементов АР при приеме РЛ-сигнала, сформированного i-й точечной целью, в отсутствие помех);
Ri(Di,εi,βi,Vri,bi) - составляющая комплексного весового вектора, определяемая из интегрального матричного уравнения
α0 - текущая оценка вектора измеряемых параметров, формируемая с помощью устройства оптимального оценивания (оптимального фильтра, например фильтра Калмана).
Текущее значение корреляционной матрицы ошибок измерения R вычисляют по формуле
Доказательство используемых в предлагаемом техническом решении выражений основано на том, что в случае групповой цели распределение электромагнитного поля по раскрыву АР является результатом интерференции РЛ-сигналов, сформированных одиночными облучаемыми целями. Поэтому вектор-столбец S(α,γ,t), составленный из КО сигналов на выходах элементов АР без шумов, определяется выражением
При известной корреляционной матрице Ф(t, t') КО помехи N(t) зависимость, определяющая условное отношение правдоподобия, имеет вид [3]
где l(Y/α) - условное отношение правдоподобия КО сигналов на выходах элементов АР;
весовой интеграл;
Y(t) = S(α,γ,t)+N(t) - вектор-столбец, составленный из КО сигналов на выходах элементов АР при приеме РЛ-сигнала  на фоне шумов;
на фоне шумов;
R(α,γ,t) = R(α,ϕ1,...,ϕn) - комплексный весовой вектор;
параметр обнаружения (в рассматриваемом случае он зависит как от измеряемых, так и от неизмеряемых параметров).
Причем дистрибутивность операции матричного умножения позволяет в случае групповой цели свести процедуру определения комплексного весового вектора R(α,γ,t) к суммированию с весами  комплексных весовых векторов Ri(Di,εi,βi,Vri,bi,t), найденных из уравнений, идентичных соответствующему уравнению способа-прототипа:
комплексных весовых векторов Ri(Di,εi,βi,Vri,bi,t), найденных из уравнений, идентичных соответствующему уравнению способа-прототипа:
так как  то
то
или
откуда
При вычислении текущего значения корреляционной матрицы ошибок измерения R предлагается воспользоваться свойством известной аппроксимации для апостериорной плотности вероятности α [3, 4]:
где αY - измеренное значение вектора измеряемых параметров.
Равенство значений матрицы Гесса натурального логарифма условного отношения правдоподобия в точках αY и α0 характерно для принятого в некоторой окрестности αY нормального распределения α.
Действительно, так как [3]
где p(α/Y) - апостериорная плотность вероятности α;
- постоянный нормирующий множитель;
р(α)=const - априорное распределение α,
то
То есть при нормальном апостериорном распределении α значение матрицы Гесса натурального логарифма условного отношения правдоподобия Y(t) постоянно и не зависит от α.
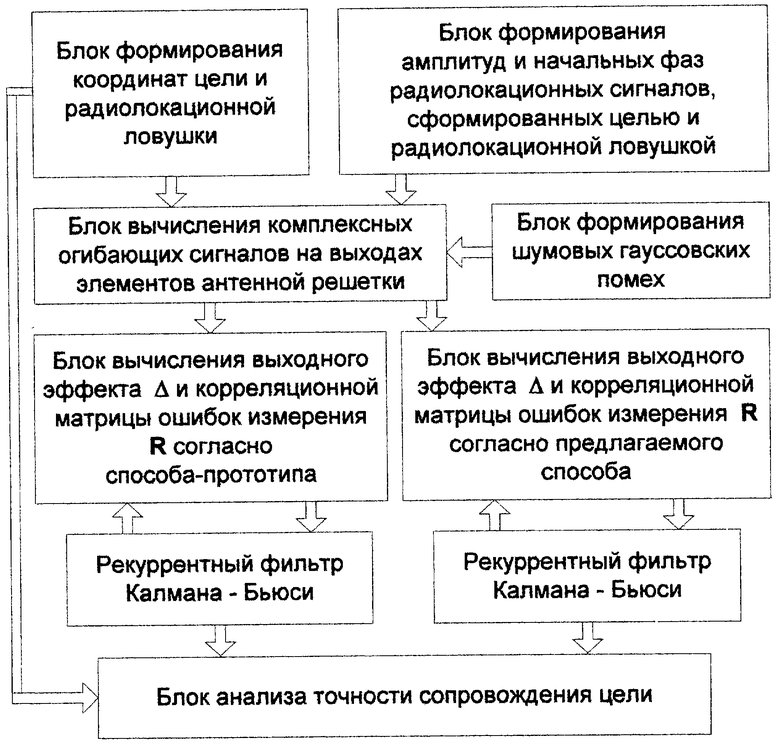
На чертеже приведена структурная схема математической модели, использовавшейся для проверки возможности получения вышеуказанного технического результата.
Осуществить предлагаемый способ возможно с помощью многоканальной радиолокационной станции.
Проверка возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилась с помощью цифрового математического моделирования.
Моделировался процесс сопровождения цели, применяющей РЛЛ, координатором, использующим предлагаемый способ измерения и формирующим оценку вектора измеряемых параметров с помощью рекуррентного фильтра Калмана-Бьюси (см. чертеж).
Цель сопровождалась по дальности, угловой координате и радиальной скорости. Поэтому вектор измеряемых параметров составляли дальности, угловые положения, радиальные скорости цели и РЛЛ, а также амплитуды сформированных ими РЛ-сигналов.
Амплитуды РЛ-сигналов, сформированных целью и РЛЛ, моделировались гауссово-марковскими экспоненциально-коррелированными процессами с известной шириной спектра мощности.
В качестве ЗС был принят простой радиоимпулъс. Превышение средней мощности РЛ-сигнала, сформированного РЛЛ, над средней мощностью РЛ-сигнала, сформированного целью, в модели составляло 2-30 раз. Отношение сигнал/шум по мощности в модели принималось равным 8-25 дБ (относительно РЛ-сигнала, сформированного целью).
Результаты моделирования подтвердили факт повышения точности сопровождения цели, применяющей РЛЛ, по дальности, угловой координате и радиальной скорости при использовании предлагаемого способа измерения параметров РЛ-сигналов. Так дисперсии ошибок сопровождения уменьшались: дальности - в 2-6 раз, угловой координаты - в 1,5-12 раз, радиальной скорости - 1,4-1,9 раза (в зависимости от отношения сигнал/шум и углового отстояния цели и РЛЛ).
ЛИТЕРАТУРА
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. 2-е изд., перераб. и доп. - М.: Радио и связь, 1984, 312 с. (с. 109-112).
2. Кузнецов А.С. Следящий измеритель угловой координаты. Авторское свидетельство 1611093 по заявке 4629820 от 24.11.1988.
3. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981, 416 с. (с. 45, 46, 47, 56, 57-59, 190, 191, 197-199, 202 и 203).
4. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991, 608 с. (с. 317).
Изобретение относится к области радиотехники и может быть использовано для измерения координат и параметров движения нескольких целей, в том числе целей из состава групповой. Техническим результатом является расширение функциональных возможностей координаторов целей, использующих радиотехнические измерительные устройства. Технический результат достигается за счет того, что, приняв с помощью антенной решетки радиолокационный сигнал, сформированный групповой целью, вектор информативных параметров расширяют так, что его элементами являются дальности, угловые координаты, радиальные скорости одиночных целей из состава групповой, а также амплитуды сформированных ими радиолокационных сигналов, начальные фазы которых случайны. 1 ил.
Способ измерения параметров радиолокационных сигналов на фоне шумовых гауссовских помех, заключающийся в том, что выделяют комплексные огибающие сигналов на выходах элементов антенной решетки, элементами вектора измеряемых параметров выбирают дальность, угловые координаты и радиальную скорость цели, формирующей радиолокационный сигнал со случайной начальной фазой, отличающийся тем, что принимают радиолокационный сигнал, сформированный групповой целью (n одиночных целей (n= 2,3, . . . )), вектор измеряемых параметров расширяют так, что его элементами являются дальности, угловые координаты, радиальные скорости одиночных целей из состава групповой, а также амплитуды сформированных ими радиолокационных сигналов, вычисляют значение градиента натурального логарифма условного отношения правдоподобия в точке текущей оценки расширенного вектора измеряемых параметров и матрицу, обратную к помноженной на -1 матрице Гесса натурального логарифма условного отношения правдоподобия в точке текущей оценки расширенного вектора измеряемых параметров.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.45-47, 56-59, 190, 191, 197-199, 202, 203 | |||
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| US 4315261 A, 09.02.1982 | |||
| Вертикально-расточной многопозиционный многошпиндельный полуавтоматический станок для окончательной обработки отверстия под палец в поршнях | 1955 |
|
SU109121A1 |
| Эжектор | 1988 |
|
SU1588923A1 |
