Изобретение относится к области радиолокационной техники, в частности к способам распознавания радиолокационных объектов, различающихся геометрическими размерами, и может быть использовано в службах управления воздушным движением, а также в радиолокационном вооружении зенитных ракетных и авиационных комплексов.
В радиолокационной технике известен способ оценки поперечных размеров радиолокационных объектов, за счет использования обратного синтезирования апертуры [1]. Цель облучают из одной точки пространства в течение определенного времени когерентной последовательностью импульсных зондирующих сигналов, отраженные от цели сигналы обрабатывают в приемнике и запоминают в течение этого времени; запомненную последовательность воспроизводят в ускоренном масштабе времени и получают доплеровский портрет цели, который позволяет измерить поперечный размер цели. Но этот способ требует значительного времени наблюдения (десятки, сотни секунд), причем цель во время наблюдения должна двигаться прямолинейно и равномерно, а это на практике не выполняется.
Известен способ оценки поперечных размеров радиолокационных объектов, предусматривающий использование многопозиционной радиолокационной системы [2] . В направлении на цель многопозиционная радиолокационная станция, включающая N когерентных РЛС, формирует N одинаковых диаграмм направленности антенны. Цель облучают из нескольких точек пространства разными РЛС, отраженные сигналы принимают приемниками этих РЛС, суммируют на радиочастоте, обеспечивая когерентность измеренных сигналов в едином пункте обработки, получают портрет цели в картинной плоскости, который позволяет измерить поперечный размер цели. Однако данный способ не позволяет вести работу РЛС только из одной точки пространства и требует обеспечения жесткой когерентности.
Наиболее близким техническим решением, позволяющим работать в реальном масштабе времени, является способ использования больших реальных апертур (размером тысячи или сотни тысяч длин волн) для оценки поперечных размеров радиолокационных объектов [3] . В направлении на цель многопозиционной на прием РЛС, одновременно формируется N диаграмм направленности антенны. Цель облучают из одной точки пространства (одна передающая антенна); отраженные сигналы принимают в нескольких точках пространства (несколькими антенно-приемными модулями, объединенными в антенную решетку больших размеров); принятые сигналы на радиочастоте суммируют на едином пункте обработки, получают портрет цели в картинной плоскости, который позволяет измерить поперечный размер цели.
Однако известный способ имеет следующие недостатки. Практика использования больших реальных апертур показывает, что апертурам от десятков и сотен метров до километров свойственны в общем случае различные искажения, что часто делает невозможным формирование главного максимума диаграммы направленности антенны с высокой направленностью. Структура боковых участков диаграммы направленности антенны еще более неустойчива. В РЛС с большой апертурой и высокой разрешающей способностью по угловым координатам искажения апертуры обусловлены траекторными нестабильностями, возникающими в процессе полета самолета. Большие реальные апертурные антенны или решетки могут иметь геометрические искажения, обусловленные невозможностью точно знать при проектировании или эксплуатации реальное расположение отдельных элементов антенны. Часто возможны и электронные искажения, главным образом фазовые погрешности в сигналах. Различным искажениям пытаются противодействовать с помощью адаптивного диаграммоформирования. Но основной недостаток больших реальных апертур - их размер, что делает невозможным использование данного способа в мобильных, компактных РЛС.
Целью предлагаемого способа является измерение поперечных размеров воздушных целей однопозиционной мобильной РЛС с антенной решеткой, используемой обыкновенными координатными станциями.
Поставленная цель достигается тем, что, используя однопозиционную мобильную РЛС, в направлении на радиолокационную цель последовательно формируют две диаграммы направленности антенны, одна диаграмма направленности имеет ширину, при которой коэффициент относительной протяженности Kβ стремится к нулю, другая диаграмма направленности со значением ширины, при которой 0 < Kβ < 1, измеряют амплитуды откликов на сигналы, принятые антенной, вычисляют среднее значение амплитуд откликов и нормированную разность этих амплитуд, сравнивают последнюю с расчетной нормированной разностью и определяют поперечный размер радиолокационной цели.
Теоретической основой способа является аналитическое описание тонкой структуры отклика пространственного фильтра на сигнал, рассеянный протяженной по угловой координате целью.
В квазиоптической области рассеяния электромагнитных волн сложная радиолокационная цель формирует конечную совокупность блестящих точек, заполняющих некоторую область пространства, характеризуемую геометрическими размерами, показанными на фиг.1:
OXY - система координат совмещенная с плоскостью раскрыва антенной системы;
OцXцYц, ОкXкYк - система координат совмещенная соответственно с геометрическим центром цели и с эффективным (кажущимся) центром радиолокационной цели;
i=1,2,3...,I - порядковый номер блестящей точки, устанавливаемый по мере нарастания координаты Xкi;
βкi , Xкi - азимут, координата i-й блестящей точки, относительно кажущегося центра вдоль оси OкXк;
βц Xц - азимут, координата геометрического центра относительно кажущегося центра;
Lβ - размер цели в азимутальной плоскости (расстояние между крайними блестящими точками цели в азимутальной плоскости).
Рассмотрим способ только применительно к размеру в азимутальной плоскости, что упрощает задачу. Измерение размера цели в угломестной плоскости решается аналогично.
Отклик пространственного фильтра (линейной антенны) на сигнал, рассеянный сложной радиолокационной целью, зависит от углового размера импульсного объема, в котором она находится. Импульсный объем в азимутальной плоскости определяется интервалом разрешения, описываемым выражением:
где Θβ0,5 - эффективная ширина главного лепестка диаграммы направленности антенны РЛС в азимутальной плоскости, оцененной по уровню половинной мощности;
D - дальность до радиолокационной цели.
Ширина диаграммы направленности антенны и дальность до радиолокационной цели в случае прокладки трассы обнаруженной цели являются известными величинами, следовательно, угловой размер импульсного объема является также величиной известной. Отношение линейного размера цели (Lβ) в азимутальной плоскости и углового размера импульсного объема Δβ определяют величину коэффициента относительной протяженности цели Kβ = Lβ/Δβ. Если Kβ стремится к нулю, то цель является точечной радиолокационной целью по координате азимута; при 0 < Kβ < 1 цель является групповой сосредоточенной, а при Kβ ≥ 1 - групповой распределенной (сверхразрешение, позволяющее получить портрет цели в азимутальной плоскости). При 0 < Kβ < 1 по аналогии с аналитическим описанием отклика оптимального (согласованного) фильтра на сигнал, рассеянный протяженной по дальности целью [4,5], амплитуда отклика пространственного линейного фильтра с точностью до постоянного множителя определяется пространственной формой параметра рассеяния и приема W(Kβ). Последний, опосредованно, через максимум отклика приемника описывает отражающие свойства сложной радиолокационной цели в дискретный момент времени, соответствующий моменту формирования пика отклика согласованного фильтра на рассеянный ею сигнал. Параметр W(Kβ) не является характеристикой цели, как независимого радиолокационного канала, а представляет собой совместную характеристику цели и канала обработки, позволяя аналитически связать характеристики пространственного фильтра (антенны) с размерами цели в картинной плоскости.
Так, например, для равномерной функции распределения поля на раскрыве антенны среднее значение параметра рассеяния и приема определяется выражением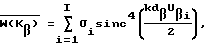
где σi - ЭПР i-й блестящей точки; - волновое число;
- волновое число;
dβ - размер апертуры антенны в азимутальной плоскости;
sinc(x) - функция  ;
; - среднее значение направляющего косинуса;l
- среднее значение направляющего косинуса;l
где  - приведенный к кажущемуся центру интервал размещения;
- приведенный к кажущемуся центру интервал размещения; - относительное значение координаты i-й блестящей точки;
- относительное значение координаты i-й блестящей точки; - относительное среднестатистическое смещение кажущегося центра радиолокационной цели по отношению к геометрическому центру цели.
- относительное среднестатистическое смещение кажущегося центра радиолокационной цели по отношению к геометрическому центру цели.
В частном случае, когда Kβ стремится к нулю, среднее значение параметра рассеяния и приема будет равно
где  - средняя эффективная поверхность рассеяния цели.
- средняя эффективная поверхность рассеяния цели.
Это известный результат для определения амплитуды отклика пространственного фильтра на сигнал, рассеянный точечной радиолокационной целью: отклик согласованного фильтра на сигнал, рассеянный точечной радиолокационной целью, с точностью до постоянного множителя равен эффективной поверхности рассеяния цели, вследствие компенсации фазочастотной характеристикой пространственного фильтра фазочастотного спектра, рассеянного целью сигнала, при Kβ/= 0 . Наличие интерференционного множителя вида  , отличающего параметр W(Kβ) и эффективную поверхность рассеяния цели, физически объясняется тем, что для групповой сосредоточенной цели, за счет распределения блестящих точек в картинной плоскости, в момент формирования максимума отклика пространственного согласованного фильтра (антенны) наложение пространственных частот сигнала происходит с различными фазовыми сдвигами, зависящими от смещения блестящих точек цели относительно ее кажущегося центра. В результате потерь за счет интерференции параметр рассеяния и приема сложной цели всегда отличается от ее эффективной поверхности рассеяния. Совпадают они только в том случае, когда коэффициент относительной протяженности цели стремится к нулю.
, отличающего параметр W(Kβ) и эффективную поверхность рассеяния цели, физически объясняется тем, что для групповой сосредоточенной цели, за счет распределения блестящих точек в картинной плоскости, в момент формирования максимума отклика пространственного согласованного фильтра (антенны) наложение пространственных частот сигнала происходит с различными фазовыми сдвигами, зависящими от смещения блестящих точек цели относительно ее кажущегося центра. В результате потерь за счет интерференции параметр рассеяния и приема сложной цели всегда отличается от ее эффективной поверхности рассеяния. Совпадают они только в том случае, когда коэффициент относительной протяженности цели стремится к нулю.
В предлагаемом способе в направлении на цель последовательно формируют две диаграммы направленности антенны с различными значениями ширины. Первая имеет ширину, обеспечивающую коэффициент относительной протяженности близкий к нулю (цель становится в положение точечной). Отклик приемника на сигнал, рассеянный целью, с точностью до постоянного множителя совпадает с мгновенным значением эффективной поверхности рассеяния радиолокационной цели. Затем в направлении на цель формируется диаграмма направленности антенны со значением ширины, обеспечивающим коэффициент относительной протяженности в пределах 0 < Kβ < 1 . Измеряется, например, с помощью многоуровнего аналогово-цифрового преобразователя, амплитуда отклика пространственного фильтра, которая с точностью до постоянного множителя будет пропорциональна мгновенному значению параметра - W(Kβ) (цель групповая сосредоточенная). С целью исключения влияния на результат измерения изрезанности диаграммы обратного вторичного излучения реальной сложной цели, переключение диаграмм направленности антенны повторяют несколько раз. Для оценки с эффективностью (доверительным интервалом) не хуже 94% достаточно иметь пять независимых отсчетов (последовательных переключений ширины диаграммы направленности антенны) при вычислении средних значений амплитуд откликов [6]. Время корреляции отраженных сигналов, с учетом современных скоростей летательных аппаратов, составляет для неманеврирующих целей τ = 0,1 -0,025 с и τ = 0,01- 2,5 • 10-3 с для маневрирующих целей [7]. Исходя из этого необходимое время получения пяти отсчетов, для каждой ширины диаграммы направленности антенны, составляет менее одной десятой секунды (τизм ≤ 0,1 с) при наихудшем варианте. В результате получают средние значения амплитуд откликов пространственного фильтра, пропорциональных средним значениям эффективной поверхности рассеяния  , и параметра рассеяния и приема
, и параметра рассеяния и приема  . Вычисление среднего значения и дальнейшие вычисления производят по известной методике, используя типовые вычислительные машины. Далее вычисляют измеренную нормированную разность вида:
. Вычисление среднего значения и дальнейшие вычисления производят по известной методике, используя типовые вычислительные машины. Далее вычисляют измеренную нормированную разность вида:
которую сравнивают с заранее рассчитанной расчетной нормированной разностью и определяют размер цели в картиной плоскости. Расчетные значения нормированной разности Арас получают, используя гипотезу о том, что цель является гантельной. Вид расчетной нормированной разности в зависимости от относительного коэффициента протяженности цели в азимутальной плоскости приведен на фиг. 2. Получив нормированную разность Аизм, входим в график зависимости Арас от отношения Lβ/D и, опускаясь на ось абсцисс, получаем отношение Lβизм/D. Далее для известной дальности находим геометрический размер цели Lβизм. Естественно, что отличие реальной цели от гантельной приводит к ошибкам измерения, но они позволяют осуществить распознавание целей, отличающихся поперечными размерами.
Так, например, с помощью имитационной модели реальной воздушной цели проведено математическое моделирование параметра рассеяния и средней эффективной поверхности рассеяния, а затем вычисление нормированной разности для двух типов самолетов: крупноразмерного Ил-76 и среднеразмерного Миг-29, на дальности шесть километров при ширине диаграммы направленности антенны Θβ0,5 = 1o (групповая сосредоточенная цель) и Θβ0,5 = 18o (цель точечная). Получены следующие нормированные разности AИл-76=0,7 и AМиг-29=0,05. Используя график фиг. 2, найдены значения отношения размера к дальности, а так как дальность известна, то нетрудно вычислить поперечный размер: LИл-76 ≈ 50 м и LМиг-29≈11 м.
Используемое в предлагаемом способе аналитическое описание отклика пространственного фильтра на сигнал, рассеянный протяженной в картинной плоскости целью, дает аналитический подход и к способу-прототипу. Если увеличить коэффициент относительной протяженности цели до величины, большей единицы, то можно аналитически описать отклик пространственного фильтра на сигнал, рассеянный групповой распределенной целью. Когда отношение размера радиолокационного объекта к угловому размеру превышает единицу (случай сверхразрешения), имеем матрицу-строку, состоящую из N параметров рассеяния и приема,
где N - число отдельно наблюдаемых групп источников вторичного излучения в элементах разрешения по угловой координате.
Угловое положение крайних элементов матрицы-строки определит поперечный размер цели. Однако получение элемента разрешения по угловой координате реальных целей на большой дальности требует очень узких диаграмм направленности антенны, следовательно, увеличения апертуры антенны, реализуемых только в многопозиционных РЛС. Для сравнения в прототипе используют многопозиционную на прием антенную решетку с апертурой 32 м. Получение портрета самолета (Boeing-727) производилось на дальности 3,2 км. Предлагаемый способ позволяет, определить поперечный размер радиолокационной цели, не увеличивая апертуру антенны, что делает возможным его применение в мобильных однопозиционных РЛС.
Литература
1. Зиновьев Ю.С., Пасшуров А. Я. Методы обращенного синтезирования апертуры в РЛС с помощью узкополосных сигналов. Зарубежная радиоэлектроника, 1985, N 3, с. 27-31.
2. Черняк В.С., Заславский Л. П., Осипов Л.П. Многопозиционные РЛС и системы. Зарубежная радиоэлектроника, 1987, N 1, с. 9-69.
3. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ. Пер с англ. ТИИЭР, 1988, N 12, т. 76, с. 26-46.
4. Бондарев Л. А. Отражающие свойства моделей сложных радиолокационных целей. Радиотехника, 1990, N 7, с. 8-13.
5. Ширман Я.Д. и др. Методы радиолокационного распознавания и их моделирование. Зарубежная радиоэлектроника, 1996, N 11, с. 3-62.
6. Стогов Г.Б. Статистическая обработка результатов по неполной выборке. Зарубежная радиоэлектроника, 1979, N 10, с. 10-19.
7. Вишин Г.М. Многочастотная радиолокация. - М.: Воениздат, 1973, 92 с.
Изобретение относится к области радиолокационной техники, в частности к способам распознавания радиолокационных объектов, различающихся геометрическими размерами, и может быть использовано в службах управления воздушным движением, а также в радиолокационном вооружении зенитных ракетных и авиационных комплексов. Технический результат - измерение поперечных размеров воздушных целей однопозиционной мобильной РЛС с антенной решеткой, используемой обыкновенными координатными станциями. Для этого используя однопозиционную мобильную РЛС, в направлении на радиолокационную цель последовательно формируют две диаграммы направленности антенны, одна диаграмма направленности имеет ширину, при которой коэффициент относительной протяженности Kβ стремится к нулю, другая диаграмма направленности со значением ширины, при которой 0 < Kβ< 1, измеряют амплитуды откликов на сигналы, принятые антенной, вычисляют среднее значение амплитуд откликов и нормированную разность этих амплитуд, сравнивают последнюю с расчетной нормированной разностью и определяют поперечный размер радиолокационной цели. 2 ил.
Способ измерения поперечных размеров радиолокационных объектов РЛС в реальном масштабе времени, отличающийся тем, что в однопозиционной мобильной РЛС в направлении на радиолокационную цель последовательно формируют две диаграммы направленности антенны с различной шириной, измеряют амплитуды откликов приемника на сигналы отраженные целью, вычисляют средние значения амплитуд откликов для различных значений ширины диаграммы направленности антенны, определяют нормированную разность этих амплитуд, сравнивают последнюю с расчетной нормированной разностью и получают поперечный размер радиолокационной цели.
| СТАЙНБЕРГ Б.Д | |||
| Формирование радиолокационного изображения самолета в диапазоне СВЧ | |||
| Пер | |||
| с англ | |||
| ТИИЭР, 1988, N 12, т.76, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| СПОСОБ ПРОИЗВОДСТВА ГОЛУБИЧНОГО НАПОЛНИТЕЛЯ | 2005 |
|
RU2298330C2 |
| US 3913099 A, 14.10.1975 | |||
| US 4855747 A, 08.08.1989 | |||
| US 5189424 A, 23.02.1993 | |||
| НЕБАБИН В.Г., СЕРГЕЕВ В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
