Изобретение относится к области радиотехнической разведки и может быть использовано для определения координат местоположения источника рассеянного радиоизлучения (радиоизлучаюшего объекта (РИО)) радиолокационными станциями с помощью приемных постов со сканированием радиоизлучений по частоте многопозиционного пассивного радиотехнического комплекса (МПРТК).
Известны способы определения координат РИО, основанные на частотном обзоре воздушного пространства сетью приемников с частотным сканированием пассивного многопозиционного радиотехнического комплекса, радипеленгации РИО, измерении разности временной задержки сигналов от РИО одинаковой частоты до разнесенных приемников и расчете пространственных координат РИО методом триангуляции, сферической интерполяции, сферического пересечения, квадратичной и линейной коррекции, гиперболической и/или параболической коррекции измеренных данных [Бузуверов Г.В., Герасимов О.И. Алгоритмы пассивной локации в распределенной сети датчиков по разностно-дальномерному методу. Информационно-измерительные и управляющие системы, №5, т.6, 2008., с 12-24; Смирнов Ю.А. «Радиотехническая разведка» - Москва, 1997. - с 164, 165, 190-193, 203-205, 211; Черняк B.C., Заславский Л.П., Осипов Л.В. Многопозиционные радиолокационные станции и системы «Зарубежная Радиоэлектроника» №1 - 1987 - с. 11, 15-17, 29-33, 42-54].
Недостатком известных способов получения радиотехнической информации на МПРТК является: неполнота полученной приемными постами и обрабатываемой центральным приемным постом информации о движущихся воздушных объектах; неполный состав координатной информации не отождествляется и не объединяется с векторами наблюдения; избыточная информация нерационально используется в алгоритмах траекторного сопровождения.
Происходит задержка в обнаружении трассы, срыв трассы с сопровождения. Снижается показатель непрерывного сопровождения цели. Увеличивается среднеквадратичное отношение ошибок определения координат и параметров движения траекторий сопровождаемых воздушных объектов, что значительно снижает качество сопровождения в существующих многопозиционных комплексах пассивной локации. На этапе сопровождения воздушного объекта по радиотехнической информации не целесообразно производить пересчет наблюдаемых параметров в радиотехнические отметки с последующей фильтрацией результатов решения разностно-дальномерной задачи.
Существующие алгоритмы обработки радиотехнической информации выполняются в два этапа с последующим этапом ее объединения. На первичном этапе ведут обнаружение сигналов, измерение параметров сигналов и наблюдаемых координат. На вторичном этапе обработки ведут привязку отметок, поступивших от одной цели по времени, и вычисление параметров траектории цели. В процессе вторичной обработки решается задача обнаружения и сопровождения трасс целей. Такое деление не учитывает особенности построения многопозиционного комплекса пассивной локации. Излучение радиоэлектронных станций обнаруживается не всеми приемными постами, в этом случае наблюдается неполный вектор наблюдаемой информации, в отсутствии чего невозможно определение всех пространственных координат цели. Неполнота обрабатываемой информации приводит к задержке в обнаружении трассы, срыву трассы с сопровождения, что приводит к снижению показателя непрерывного сопровождения, а также к увеличению среднеквадратического отклонения ошибок определения координат и параметров движения траектории сопровождаемой цели.
Координаты определяются только по минимально необходимому количеству первичных радиотехнических измерений, остальные измерения не учитываются при формировании отметки и в алгоритмах фильтрации.
Для существующих алгоритмов фильтрации необходимо определить момент времени излучения воздушного объекта минимум 4-мя приемными постами за один обзор, чтобы определить координаты воздушного объекта с последующей оценкой.
Отсутствуют методы использования в алгоритмах траекторного сопровождения избыточности первичных радиотехнических измерений от приемного поста. Из-за отсутствия определения приоритетности радиотехнической информации при определении координат (расчета центра тяжести фигуры), а также при последующей фильтрации учета всего вектора наблюдаемой информации происходит ухудшение параметров движения траектории сопровождаемой цели.
Перечисленные факторы приводят к необходимости создания фильтра пеленговой информации в многопозиционных комплексах пассивной локации, учитывающего разновременность и неполноту наблюдаемых параметров.
Наиболее близким по технической сущности к заявляемому изобретению относится способ определения координат РИО [«Способ Бондаренко А.В. получения радиотехнической информации и радиотехнический комплекс для его осуществления». Патент 2599259. Россия. Бондаренко А.В. Заявл. 05.11.2015 г. Опубл. 10.10.2016 г. Бюл. №28], заключающийся в том, что синхронизированные между собой по времени и разнесенные на местности пары приемных постов станций радиотехнической разведки через датчики с последовательным сканированием по частоте получают данные пассивного радиоизлучения - разность времени приема радиоизлучения, несущую частоту бортового радиоэлектронного средства и момент времени получения измерения пеленга, данные направляют на центральный приемный пост, преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту и привязывают к имеющимся на сопровождении радиотехническим траекториям, на множестве изолированных радиотехнических отметок, сформированном при сканировании, производят операцию фильтрации результатов решения разностно-дальномерной задачи обнаружения радиотехнической траектории в следующей последовательности: определяют размеры стробов автозахвата  , где x,y,z - координаты воздушного объекта, xэ,yэ,zэ - экстраполированные координаты, вычисляют начальные параметры траектории и их подтверждение по решению (v/m-l) об обнаружении при появлении ν отметок в m смежных обзорах при отсутствии отметок в 1 смежных обзорах, устанавливают вектор S(t) состояния траектории, составляют модель движения как S(t+Δt)=FΔt⋅S(t), где Δt=tk+1-tk - период обзора, FΔt - матрица перехода траектории воздушного объекта при маневрировании, получают матрицу Hn(S) производной функции наблюдения
, где x,y,z - координаты воздушного объекта, xэ,yэ,zэ - экстраполированные координаты, вычисляют начальные параметры траектории и их подтверждение по решению (v/m-l) об обнаружении при появлении ν отметок в m смежных обзорах при отсутствии отметок в 1 смежных обзорах, устанавливают вектор S(t) состояния траектории, составляют модель движения как S(t+Δt)=FΔt⋅S(t), где Δt=tk+1-tk - период обзора, FΔt - матрица перехода траектории воздушного объекта при маневрировании, получают матрицу Hn(S) производной функции наблюдения  , для каждой пары информационный датчиков вычисляют экстраполированные значения вектора состояния Sk+1=FΔt⋅S(t) и алгоритмической ковариационной матрицы Qk+1=FΔt⋅Qk⋅(FΔt)T,
, для каждой пары информационный датчиков вычисляют экстраполированные значения вектора состояния Sk+1=FΔt⋅S(t) и алгоритмической ковариационной матрицы Qk+1=FΔt⋅Qk⋅(FΔt)T,  - вектор экстраполяции разностей дальности, а также матрицу производной функции наблюдения в виде
- вектор экстраполяции разностей дальности, а также матрицу производной функции наблюдения в виде  , рассчитывают дисперсионную ошибку экстраполяции в пространстве наблюдаемых параметров
, рассчитывают дисперсионную ошибку экстраполяции в пространстве наблюдаемых параметров  , вычисляют отклонение ΔRi, на tk+1 шаге наблюдения, от ожидаемого наблюдения при произведенной экстраполяции
, вычисляют отклонение ΔRi, на tk+1 шаге наблюдения, от ожидаемого наблюдения при произведенной экстраполяции  , определяют коэффициент усиления
, определяют коэффициент усиления  , где σ0 - среднеквадратическая ошибка измерения времени прихода сигнала, уточняют значение вектора состояния
, где σ0 - среднеквадратическая ошибка измерения времени прихода сигнала, уточняют значение вектора состояния  и алгоритмическую ковариационную матрицу
и алгоритмическую ковариационную матрицу  , где Ε - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании разности времен прихода сигнала на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения плоскостных координат
, где Ε - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании разности времен прихода сигнала на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения плоскостных координат  , где
, где  - расстояние от цели до оценки координат в момент времени t, Nреал - количество реализаций (Nреал≥1000), отличающейся тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных разностей времени прихода сигналов по времени их поступления, при этом движение принимают прямолинейным и равномерным, а в противном случае - принимают за маневр, формирование начальной оценки приближенного вектора параметров траектории и ковариационной матрицы ошибок на приемных постах производят по первой фиксации разности времен прихода сигнала от цели, поступившей от одной пары информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию разностно-дальномерной информации по воздушному объекту по времени ее поступления производят следующим образом: задают вектор состояния траектории в виде S(t)=(x,y,z,Vx,Vy,Vz), где Vx,Vy,Vz - проекции вектора скорости координат x,y,z, фильтрацию координатной информации производят по зависимости
- расстояние от цели до оценки координат в момент времени t, Nреал - количество реализаций (Nреал≥1000), отличающейся тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных разностей времени прихода сигналов по времени их поступления, при этом движение принимают прямолинейным и равномерным, а в противном случае - принимают за маневр, формирование начальной оценки приближенного вектора параметров траектории и ковариационной матрицы ошибок на приемных постах производят по первой фиксации разности времен прихода сигнала от цели, поступившей от одной пары информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию разностно-дальномерной информации по воздушному объекту по времени ее поступления производят следующим образом: задают вектор состояния траектории в виде S(t)=(x,y,z,Vx,Vy,Vz), где Vx,Vy,Vz - проекции вектора скорости координат x,y,z, фильтрацию координатной информации производят по зависимости
 , где Rn={R1,2,R1,3,R1,4} - разность дальностей прихода сигналов; τn - разности времени прихода сигналов;
, где Rn={R1,2,R1,3,R1,4} - разность дальностей прихода сигналов; τn - разности времени прихода сигналов;  порядковый номер групп пары i-ых приемных постов от источника радиолокационной информации в эти приемные посты Rn=(с*⋅τ1;c*⋅τ2;с*⋅τ3)T, с* - скорость света (с*≈3⋅108 м/с); далее с учетом влияния ошибок экстраполяции производят сглаживание ошибок разности времен прихода сигнала, при этом матрицу производной функции наблюдения выражают в виде
порядковый номер групп пары i-ых приемных постов от источника радиолокационной информации в эти приемные посты Rn=(с*⋅τ1;c*⋅τ2;с*⋅τ3)T, с* - скорость света (с*≈3⋅108 м/с); далее с учетом влияния ошибок экстраполяции производят сглаживание ошибок разности времен прихода сигнала, при этом матрицу производной функции наблюдения выражают в виде  , где
, где
Причем прием информации от радиоизлучающего объекта и ее последующую обработку ведут на приемных постах и на центральном посту по последовательно связанным между собой блокам, которые каналами связи соединяют с устройством управления антеннами с датчиками приемных постов и устройством пространственно-временной синхронизации принятой ими информации, которую затем фильтруют.
Недостатком известного способа определения координат РИО является то, что синхронизированные между собой по времени и разнесенные на местности пары приемных постов (ПП) МПРТК через радиоприемники с частотным сканированием воздушного пространства и центральный приемный пост не позволяют измерять координаты РИО у линии, соединяющей два ПП, в секторе провала рабочей зоны МПРТК, а их отсутствие компенсируется фильтрацией данных сканирования.
Поставленная цель возможности кругового обзора и точного определения координат РИО в секторах провала рабочей зоны МПРТК во внешних углах α,β,γ, составленных прямыми линиями, соединяющими попарно каждый ПП в треугольнике их расположения, в предлагаемом способе определения координат радиоизлучающего объекта в рабочей зоне МПРТК, заключающемся в том, что синхронизированные между собой по времени и разнесенные на местности пары приемных постов МПРТК через радиоприемники с частотным сканированием воздушного пространства получают данные пассивного обнаружения РИО, включая разность Δt времени приема радиоизлучения ПП, несущую частоту f бортового радиоэлектронного средства РИО и момент t времени их пеленгации, полученные данные посылают на центральный приемный пост МПРТК, где принятые данные привязывают к центральной декартовой системе координат с началом в центральном приемном посту и к имеющимся на сопровождении МПРТК радиотехническим траекториям на множестве изолированных радиотехнических отметок, сформированном при сканировании воздушного пространства, далее на сформированном множестве радиотехнических отметок определяют координаты обнаруженного РИО путем решения разностно-дальномерной задачи по критерию максимума функции правдоподобия, а прием информации от РИО и ее последующую обработку ведут на приемных постах и на центральном посту по последовательно связанным между собой блокам, которые каналами связи соединяют с устройством управления антеннами с датчиками приемных постов и устройством пространственно-временной синхронизации принятой ими информации, которую затем фильтруют, достигается тем, что в вычислительном блоке начальных координат РИО производят измерение разности времен Δt2ц, Δt3ц прихода сигнала и вычисление начального приближения координат  , которые по каналам связи направляют в блок вычисления функции правдоподобия для оценки координат РИО, которые формируют по правилу
, которые по каналам связи направляют в блок вычисления функции правдоподобия для оценки координат РИО, которые формируют по правилу

где  , xi,yi - координаты местонахождения ПП, х,у - координаты РИО, Δt2ц - разность времени прихода сигнала от РИО на 2-й и центральный ПП, Δt3ц - разность времени прихода сигнала от РИО на 3-й и центральный ПП, Rц2 - разность расстояний ППц - РИО и ПП2 - РИО, Rц3 - разность расстояний ППц - РИО и ПП3 - РИО,
, xi,yi - координаты местонахождения ПП, х,у - координаты РИО, Δt2ц - разность времени прихода сигнала от РИО на 2-й и центральный ПП, Δt3ц - разность времени прихода сигнала от РИО на 3-й и центральный ПП, Rц2 - разность расстояний ППц - РИО и ПП2 - РИО, Rц3 - разность расстояний ППц - РИО и ПП3 - РИО,  - вектор измерений разностей времен прихода сигнала от РИО на ПП, QR - ковариационную матрицу ошибок определения времени прихода сигнала от цели i-м ПП определяют как
- вектор измерений разностей времен прихода сигнала от РИО на ПП, QR - ковариационную матрицу ошибок определения времени прихода сигнала от цели i-м ПП определяют как
 , где
, где  ,
,  - СКО определения времени прихода сигнала от цели i-м ПП, с* - скорость света; далее данные вычислений направляют в блок решения задачи минимизации функционала:
- СКО определения времени прихода сигнала от цели i-м ПП, с* - скорость света; далее данные вычислений направляют в блок решения задачи минимизации функционала:  ; а затем в блок квадратичной аппроксимацию функции φ(х,у) методом Ньютона в каждой точке (xk,yk)T
; а затем в блок квадратичной аппроксимацию функции φ(х,у) методом Ньютона в каждой точке (xk,yk)T

где  - матрица первых частных производных функции,
- матрица первых частных производных функции,  - матрица вторых частных производных функции φ(х,у), (xk,yk)T - начальное приближение плоскостных координат х,у, при k=1 приравнивают
- матрица вторых частных производных функции φ(х,у), (xk,yk)T - начальное приближение плоскостных координат х,у, при k=1 приравнивают  , на последующих итерациях их уточняют,
, на последующих итерациях их уточняют,  - номер итерации, Τ - математический символ транспонирования; откуда данные вычислений направляют в блок определения координат РИО, где для квадратичного функционала φ(х,у) точку (xk,yk)T принимаю за точку минимума, а минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона; в случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск выражают в градиентный; для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при
- номер итерации, Τ - математический символ транспонирования; откуда данные вычислений направляют в блок определения координат РИО, где для квадратичного функционала φ(х,у) точку (xk,yk)T принимаю за точку минимума, а минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона; в случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск выражают в градиентный; для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при  асимптотически приближают к минимуму; условие окончания поиска принимают градиентным методом
асимптотически приближают к минимуму; условие окончания поиска принимают градиентным методом

где ε - задаваемая необходимая точность расчета, а функционал φ(х,у) преобразуют следующим образом
где С, Ν, K - константы, которые вычисляют по правилам:



а затем частные производные определяют по формулам:





где l - параметр, который подбирают с учетом необходимой точности вычисления производной при условии - чем точнее необходимо вычислить производную, тем меньше должно быть l и недопустима соизмеримость разности значений функции φ(х,у) или l с абсолютной погрешностью вычисления.
Предлагаемое изобретение позволяет заменить поиск численных значений координат РИО по максимуму функции правдоподобия  на поиск минимума дифференцируемого функционала φ(х,у) в секторах провала рабочей зоны приемных постов многопозиционного радиотехнического комплекса пассивной локации.
на поиск минимума дифференцируемого функционала φ(х,у) в секторах провала рабочей зоны приемных постов многопозиционного радиотехнического комплекса пассивной локации.
Использование дифференцируемого функционала φ(х,у) в свою очередь позволяет применить квадратичную аппроксимацию дифференцируемой функции φ(х,у) в каждой точке (xk,yk) центральной базы данных измерений ПП, а также применить метод Ньютона для обеспечения требуемой крутизны дифференцируемой функции φ(х,у) и повышения точности измерений координат РИО. Регистрация численных значений (х,у) координат РИО, соответствующих точке минимума функционала φ(х,у), в виде истинных значений (х,у) координат РИО позволяет решить проблему измерения координат РИО в секторах провала рабочей зоны приемных постов многопозиционного радиотехнического комплекса. В целом указанные технические преимущества позволяют решить проблему измерения координат РИО в секторе провала рабочей зоны МПРТК и, как следствие, обеспечить требуемую точность измерений в указанной зоне.
2. Известно устройство радиотехнического комплекса пассивной локации с последовательным сканированием радиоизлучений воздушных объектов, состоящее из приемных постов с информационными датчиками станции радиотехнической разведки, способных измерять в азимутальной плоскости направления движения воздушных объектов с излучающими радиоэлектронными средствами и фиксировать момент перехода импульсов от излучающих средств при смене направления движения воздушного объекта, сканировать по частоте и определять местоположение воздушного объекта путем решения разностно-дальномерной задачи и оснащенных электронных блоков автозахвата в стробе размером
 , где x,y,z - координаты воздушного объекта, xэ,yэ,zэ - экстраполированные координаты воздушного объекта, а также блока трассового сопровождения воздушных объектов с фильтром Калмана динамики воздушных объектов, достигается тем, что фильтр динамики воздушных объектов на каждом из приемных постов составлен из электронного блока установки вектора состояния воздушного объекта S(t)=(x,y,z,Vx,Vy,Vz), где Vx,Vy,Vz - проекции вектора скорости координат x, y, z производящего фильтрацию координатной информации по зависимостям
, где x,y,z - координаты воздушного объекта, xэ,yэ,zэ - экстраполированные координаты воздушного объекта, а также блока трассового сопровождения воздушных объектов с фильтром Калмана динамики воздушных объектов, достигается тем, что фильтр динамики воздушных объектов на каждом из приемных постов составлен из электронного блока установки вектора состояния воздушного объекта S(t)=(x,y,z,Vx,Vy,Vz), где Vx,Vy,Vz - проекции вектора скорости координат x, y, z производящего фильтрацию координатной информации по зависимостям
где Rn=(R1,2,R1,3,R1,4) - разность дальностей прихода сигналов τn;  порядковый номер групп пары i-x приемных постов от источника радиолока-ционной информации в эти приемные посты Rn=(с*⋅τ1,с*⋅τ2,с*⋅τ3)T, с* - скорость света (с*≈3⋅108 м/с); далее с учетом влияния ошибок экстраполяции производят сглаживание ошибок разности времен прихода сигнала, при этом матрицу производной функции наблюдения выражают в виде
порядковый номер групп пары i-x приемных постов от источника радиолока-ционной информации в эти приемные посты Rn=(с*⋅τ1,с*⋅τ2,с*⋅τ3)T, с* - скорость света (с*≈3⋅108 м/с); далее с учетом влияния ошибок экстраполяции производят сглаживание ошибок разности времен прихода сигнала, при этом матрицу производной функции наблюдения выражают в виде  , где
, где
блока вычисления экстраполированного значения вектора состояния Sk+1=FΔtS(t), блока определения коэффициента усиления k, блока уточнения вектора состояния и алгоритмической ковариационной матрицы, а также блока оценки работы фильтра при сглаживании разности времен прихода сигнала на станции радиотехнической разведки. [Патент №2599259 «Способ Бондаренко А.В. получения радиотехнической информации и радиотехнический комплекс для его осуществления» от 05.11.2015, Бюл. №28 от 10.10.2016].
Известное устройство радиотехнического комплекса пассивной локации с последовательным сканированием радиоизлучений воздушных объектов при треугольном расположении приемных постов (ПП) на местности не позволяет производить сплошное круговое сканирование радиоизлучений от воздушных объектов из-за наличия открытых окон отсутствия сканирования в трех внешних углах, образованных линиями соединения трех ПП.
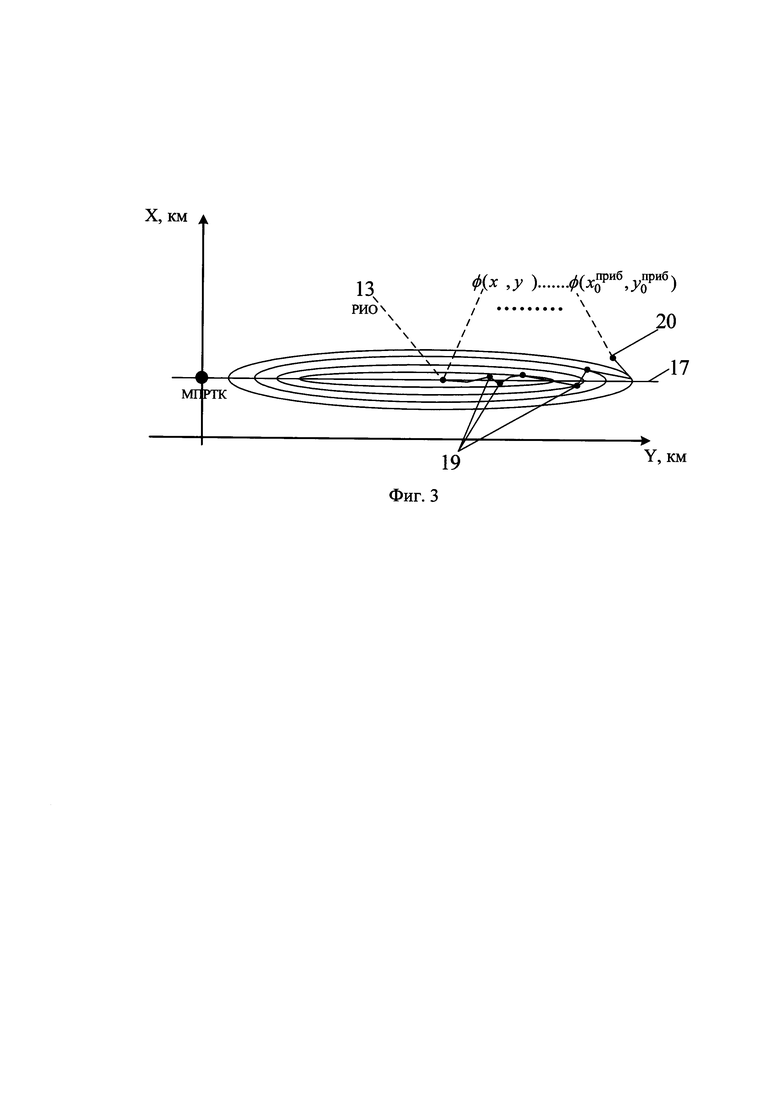
Сущность изобретения поясняется графическими материалами: на фиг.1 - блок-схема работы устройства управления антеннами определения координат радиоизлучающего объекта в рабочей зоне МПРТК; на фиг.2 представлен рисунок, поясняющий принцип измерения координат РИО в секторе провала рабочей зоны трехпозиционного МПРТК; на фиг.3 - уточнение начального приближения координат РИО; на фиг.4 - зависимости среднеквадратических ошибок (СКО) измерений плоскостных координат σх,у РИО от ошибок измерения времени прихода сигнала στ; на фиг.5 представлена блок-схема алгоритма решения разностно-дальномерной задачи.
Устройство для определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса состоит из приемных постов 2 ППц, ПП2 и ПП3 (фиг.2) с информационными датчиками 1 (фиг.1) станции радиотехнической разведки, способных измерять в азимутальной плоскости направление движения воздушного радиоизлучающего объекта (РИО) 13 с излучающими радиоэлектронными средствами, сканировать по частоте и определять местоположение воздушного объекта 13, оснащенных антеннами 3 (фиг.1), составленных в треугольник (фиг.2) на местности и синхронизированных между собой в пространстве и во времени посредством применения абонентского терминала 4 ГЛОНАСС и устройства 5 пространственно-временной синхронизации, и ППц, с фильтрами 6, причем фильтры 6 связаны с блоком 7 вычисления начальных координат с измерением разностей времен Δt2ц и Δt3ц и вычисления начального приближения координат  РИО, соединенного каналами связи с блоком 8 вычисления функции правдоподобия
РИО, соединенного каналами связи с блоком 8 вычисления функции правдоподобия

по данным определения вектора измерения разностей времен прихода сигнала

где xi, yi - координаты ПП; x,у - координаты РИО;  - разность времени прихода сигнала от РИО на 2-ой и центральный ПП;
- разность времени прихода сигнала от РИО на 2-ой и центральный ПП;  - разность времени прихода сигнала от РИО на 3-ий и центральный ПП; Rц2 - разность расстояний ППц - РИО и ПП2 - РИО; - разность расстояний ППц - РИО и ПП3 - РИО; с* - скорость света, и данным ковариационной матрицы ошибок определения времени прихода сигнала от цели i-м ПП
- разность времени прихода сигнала от РИО на 3-ий и центральный ПП; Rц2 - разность расстояний ППц - РИО и ПП2 - РИО; - разность расстояний ППц - РИО и ПП3 - РИО; с* - скорость света, и данным ковариационной матрицы ошибок определения времени прихода сигнала от цели i-м ПП
 , где Rn - разности дальностей от источника радиолокационного излучения РИО 13 до приемного поста (ПП); - среднеквадратическая ошибка (СКО) определения времени прихода сигнала от РИО i-м ПП; τi - разность прихода сигналов, измеряемая парой ПП, и ; последовательно соединенного через блок 9, решения задачи минимизации дифференцируемого функционала
, где Rn - разности дальностей от источника радиолокационного излучения РИО 13 до приемного поста (ПП); - среднеквадратическая ошибка (СКО) определения времени прихода сигнала от РИО i-м ПП; τi - разность прихода сигналов, измеряемая парой ПП, и ; последовательно соединенного через блок 9, решения задачи минимизации дифференцируемого функционала

с блоком 10 квадратичной аппроксимации функции φ(х,у) в точке (xk,yk) по методу Ньютона в виде

где  - матрица первых частных производных функции, а
- матрица первых частных производных функции, а  - матрица вторых частных производных функции φ(х,у); (xk,yk)T - начальное приближение плоскостных координат х,у, (при k=1 приравнивается
- матрица вторых частных производных функции φ(х,у); (xk,yk)T - начальное приближение плоскостных координат х,у, (при k=1 приравнивается  , а на последующих итерациях (xk,yk)T уточняется); k=1,5 - номер итерации; Τ - математический символ транспонирования, и окончательно с блоком 11 определения координат РИО по условию
, а на последующих итерациях (xk,yk)T уточняется); k=1,5 - номер итерации; Τ - математический символ транспонирования, и окончательно с блоком 11 определения координат РИО по условию

где ε - задаваемая необходимая точность расчета, после преобразования функционала φ(х,у) в следующем виде
 где
где

а частные производные





где l - параметр, который подбирают с учетом необходимой точности вычисления производной при условии - чем точнее необходимо вычислить производную, тем меньше должно быть l и недопустима соизмеримость разности значений функции φ(х,у) или l с абсолютной погрешностью вычисления.
Сущность предлагаемого способа определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса состоит в следующем.
На местности друг от друга на определенном расстоянии располагают три приемных поста ППц, ПП2, ПП3 (фиг.2), входящие в рабочую зону 12 трехпозиционного (многопозиционного) радиотехнического комплекса обнаружения РИО 13, несущего радиоизлучающую бортовую аппаратуру, и включающий также центральный приемный пост 1 ППц, функцию которого выполняет ПП1 для нахождения координат (х,у) радиоизлучающего объекта 13 (фиг.2), движущегося по траектории 14. По разностям дальностей - пересечение линий (гипербол) постоянной разности расстояний 15, 16 от РИО 13 до ППц, ПП2, ПП3 решают систему уравнений

где t - момент времени излучения сигналов, ti,  - время прихода на i-й ПП сигнала от РИО 13, Di,
- время прихода на i-й ПП сигнала от РИО 13, Di, - наклонные дальности от ПП до РИО 13, r=D1, с* - скорость света. Тогда
- наклонные дальности от ПП до РИО 13, r=D1, с* - скорость света. Тогда

Представляют систему уравнений (1) как

Для решения системы уравнений (2) приравнивают квадраты левой и правой частей каждого из уравнений данной системы в виде координат

Преобразуют уравнение (3) и представляют его в матричном виде

В зависимости (4) неизвестные х,у линейно выражают через r. Для решения уравнения вводят две переменные - векторы 

После подстановки введенных переменных уравнение (4) получают в следующем виде

где  - квадраты векторов
- квадраты векторов  и
и  соответственно,
соответственно,  скалярное произведение векторов
скалярное произведение векторов  и
и  , а r1,2 - два вещественных корня
, а r1,2 - два вещественных корня

где 
После подстановки найденных значений r в уравнении (4) находят неизвестные (х,у) координаты РИО 13. При q>0 уравнению (4) соответствует два решения. При q<0 РИО 13 находят на линии 17 соединяющей ППц и ПП2, а эллипс ошибок 18 измерения координат РИО 13 становится бесконечным вдоль линии 17, и уравнение (5) не имеет вещественных корней. В этом случае вычисление начального приближения плоскостных координат 20  (фиг.3) производят одним из следующих методов: сначала в уравнении (6) принимают значение q=0 [Гольдштейн А.Л. Теория принятия решений. Задачи и методы исследования операций и принятия решений. ПГТУ - Санкт-Петербург: «Учебное пособие», 2002; Моисеев Η.Н. Математические задачи системного анализа. - М: «Наука», 1981], а далее находят комплексные корни уравнения (6)
(фиг.3) производят одним из следующих методов: сначала в уравнении (6) принимают значение q=0 [Гольдштейн А.Л. Теория принятия решений. Задачи и методы исследования операций и принятия решений. ПГТУ - Санкт-Петербург: «Учебное пособие», 2002; Моисеев Η.Н. Математические задачи системного анализа. - М: «Наука», 1981], а далее находят комплексные корни уравнения (6)

где α - действительная часть комплексного корня уравнения (7), ib - мнимая часть.
Из уравнения (7) выделяют действительную часть комплексных корней -  . Так как полученные корни
. Так как полученные корни  лежат на линии 17, соединяющей пары постов ППц и ПП2 МПРТК, симметрично от местоположения РИО 13, то
лежат на линии 17, соединяющей пары постов ППц и ПП2 МПРТК, симметрично от местоположения РИО 13, то  20 вычисляют по следующему уравнению
20 вычисляют по следующему уравнению 
Далее выполняют уточнение решения и составляют функцию правдоподобия для оценки координат разностно-дальномерным методом. Для этого находят вектор измерений разностей времен прихода сигнала:

где  - время прихода сигналов от РИО 13 на ППц, ПП2 и ПП3;
- время прихода сигналов от РИО 13 на ППц, ПП2 и ПП3;  ,
,  - разность времени прихода сигналов измеряют парой ПП2, ППц и парой ПП3, ППц;
- разность времени прихода сигналов измеряют парой ПП2, ППц и парой ПП3, ППц;  - разности расстояний ППц - РИО и ПП2 - РИО, ППц - РИО и ПП3 - РИО соответственно.
- разности расстояний ППц - РИО и ПП2 - РИО, ППц - РИО и ПП3 - РИО соответственно.
Ковариационную матрицу ошибок определения времени прихода сигнала от цели i-м ПП записывают в виде

где Rn - разности дальностей от источника радиолокационной информации до ПП;  - СКО определения времени прихода сигнала от РИО 13 i-м ПП; τn - разность времени прихода сигналов, измеряемая парой ПП, где
- СКО определения времени прихода сигнала от РИО 13 i-м ПП; τn - разность времени прихода сигналов, измеряемая парой ПП, где  .
.
Затем осуществляют реализацию способа функции правдоподобия для оценки координат РИО 13

где  ; xi,yi - координаты ППi; х,у - координаты РИО 13; Δt2ц - разность времени прихода сигнала от РИО 13 на ПП2 и ППц; Δt3ц - разность времени прихода сигнала от РИО 13 на ПП3 и ППц; Rц2 - разность расстояний ППц - РИО и ПП2 - РИО; Rц3 - разность расстояний ППц - РИО и ПП3 - РИО;
; xi,yi - координаты ППi; х,у - координаты РИО 13; Δt2ц - разность времени прихода сигнала от РИО 13 на ПП2 и ППц; Δt3ц - разность времени прихода сигнала от РИО 13 на ПП3 и ППц; Rц2 - разность расстояний ППц - РИО и ПП2 - РИО; Rц3 - разность расстояний ППц - РИО и ПП3 - РИО;  - вектор измерений разностей времен прихода сигнала от РИО 13 на ПП; a QR - ковариационную матрицу ошибок определения времени прихода сигнала от цели i-м ПП определяют как
- вектор измерений разностей времен прихода сигнала от РИО 13 на ПП; a QR - ковариационную матрицу ошибок определения времени прихода сигнала от цели i-м ПП определяют как
 , где
, где  ;
;  - СКО определения времени прихода сигнала от цели i-м ПП.
- СКО определения времени прихода сигнала от цели i-м ПП.
Далее оценку координат разностно-дальномерной задачи по критерию максимума функции правдоподобия (8) заменяют решением задачи минимизации дифференцируемого функционала вида

При дифференцируемости φ(х,у) в точке (xk,yk) 19 (фиг.3) применяют метод Ньютона для квадратичной аппроксимации функционала, при этом задачу поиска координат (xk,yk) 19 РИО 13 записывают в виде

где  - матрица первых частных производных функции, а
- матрица первых частных производных функции, а  - матрица вторых частных производных функции φ(х,у); (xk,yk)T - начальное приближение плоскостных координат х,у; при k=1 приравнивают
- матрица вторых частных производных функции φ(х,у); (xk,yk)T - начальное приближение плоскостных координат х,у; при k=1 приравнивают  20, на последующих итерациях их уточняют;
20, на последующих итерациях их уточняют;  - номер итерации; Τ - математический символ транспонирования.
- номер итерации; Τ - математический символ транспонирования.
Для квадратичного функционала φ(х,у) точку  19 считают точкой минимума, следовательно, минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона. В случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск вырождают в градиентный. Для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при
19 считают точкой минимума, следовательно, минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона. В случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск вырождают в градиентный. Для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при  асимптотически приближают к минимуму.
асимптотически приближают к минимуму.
Далее функционал φ(х,у) преобразуют следующим образом
где С, Ν, K - константы, вычисленные по правилам
а затем находят частные производные





где l - параметр, подбираемый с учетом необходимой точности вычисления производной.
Чем точнее вычисляют производную, тем меньше должно быть l. Недопустимо, чтобы разность значений функции φ(х,у) или l была соизмерима с абсолютной погрешностью вычисления.
Поиск численных значений (х,у) координат РИО 13 заканчивают по правилу

где ε - задаваемая необходимая точность расчета; а результаты численных значений (х,у) координат РИО 13, соответствующих точке минимума функционала φ(х,у), регистрируют в виде истинных значений (х,у) координат РИО 13 в секторах провала - эллипсы ошибок 18 (фиг.2) рабочей зоны приемных постов многопозиционного радиотехнического комплекса.
В предлагаемом способе при проведении последовательных итераций находят последовательные приближения х,у. Количество итераций ограничивают максимальным значением эллипса ошибок 18 измерения координат РИО 13, являющимся наиболее оптимальным значением при достаточно грубом начальном приближении.
Численные значения (х,у) координат РИО 13, удовлетворяющие правилу (9), запоминают и выдают потребителю радиотехнической информации, например, в диспетчерскую службу управления воздушным движением (УВД) и радиотехнической разведки (РТР). Ниже представлен алгоритм решения разностно-дальномерной задачи.
Впервые разработан способ определения местоположения РИО в секторах провала рабочей зоны многопозиционного радиотехнического комплекса и определения сходимости результатов измерений координат РИО в зависимости от ошибок измерения времени прихода сигнала στ от РИО на приемные посты МПРТК.
Для квадратичного функционала φ(х,у) точка (xk+1,yk+1)T является точкой минимума. Следовательно, минимум такой функции из любой начальной точки достигается за один шаг метода Ньютона. В случае линейной аппроксимации матрица F(xk,yk) становится единичной, и поиск вырождается в градиентный. Для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при  асимптотически приближают к минимуму.
асимптотически приближают к минимуму.
В способе задают следующие наиболее трудные условия для измерения координат РИО: 1) РИО расположен на одной линии, соединяющей два ППц и ПП3 (фиг.2) радиотехнического комплекса; 2) ошибка измерения времени прихода сигнала σ=0…60 (нс) с шагом 1 (нс); количество реализаций случайного процесса для каждого στ - 1000; 3) количество шагов по поиску координат РИО методом Ньютона - не более 5.
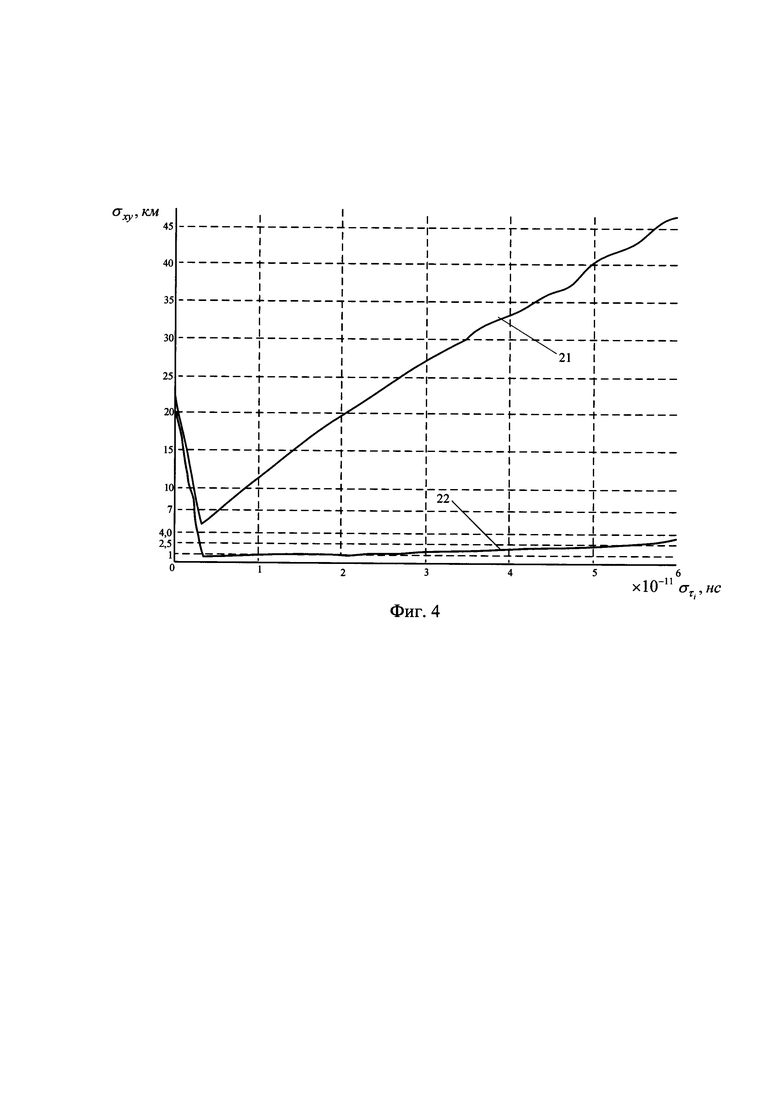
Результаты моделирования и оценки среднеквадратических ошибок определения плоскостных координат σх,у РИО от ошибок измерения времени прихода сигнала στ, представлены на фиг.4.
Анализ зависимостей, представленных на фиг.4, показывает, что при отсутствии ошибок измерений разности прихода сигналов на ПП МПРТК ошибки определения координат РИО в месте провала рабочей зоны радиотехнического комплекса минимальны. Однако при ошибках измерения разности прихода сигналов ПП, что имеет место на практике, СКО определения плоскостных координат РИО существующим способом 21 (фиг.4) в 5…10 раз превышают СКО для предлагаемого способа 22 (фиг.4).
Величина ошибки определения местоположения объекта при нахождении ее в секторе ±5° относительно линии, соединяющей пару ПП, при использовании разработанного способа в 1,5…10 раз (в зависимости от  ), меньше соответствующей величины для существующих способов определения координат РИО, что позволяет устранить ситуацию провала рабочей зоны МПРТК.
), меньше соответствующей величины для существующих способов определения координат РИО, что позволяет устранить ситуацию провала рабочей зоны МПРТК.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НОСИТЕЛЯ ОБЗОРНОЙ РЛС | 2007 |
|
RU2390038C2 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |



Группа изобретений относится к области радиотехнической разведки и может быть использована для определения координат местоположения источника рассеянного радиоизлучения (радиоизлучающего объекта (РИО)) радиолокационными станциями с помощью приемных постов со сканированием радиоизлучений по частоте многопозиционного пассивного радиотехнического комплекса (МПРТК). Техническим результатом является обеспечение возможности кругового обзора и точного определения координат РИО в секторах провала рабочей зоны МПРТК. В заявленном способе синхронизированные между собой по времени и разнесенные на местности пары приемных постов МПРТК через датчики с последовательным сканированием по частоте получают данные радиоизлучения РИО, включая разность времени приема радиоизлучения, несущую частоту бортового радиоэлектронного средства РИО и момент времени получения измерения пеленга. Данные измерений приемных постов передают на центральный приемный пост. На центральном посту принятые данные преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту и определяют координаты воздушного радиоизлучающего объекта решением разностно-дальномерной задачи по критерию максимума функции правдоподобия. Для уточнения координат объекта в секторах провала рабочей зоны комплекса по полученному начальному приближению координат РИО проводят минимизацию функционала квадратичной аппроксимации дифференцируемой функции правдоподобия итерационным методом Ньютона. 2 н.п. ф-лы, 5 ил.
1. Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса (МПРТК), заключающийся в том, что синхронизированные между собой по времени и разнесенные на местности пары приемных постов (ПП) МПРТК через радиоприемники с частотным сканированием воздушного пространства получают данные пассивного обнаружения радиоизлучающих объектов (РИО), включая разность Δt времени приема радиоизлучения ПП, несущую частоту ƒ бортового радиоэлектронного средства РИО и момент t времени их пеленгации, полученные данные посылают на центральный приемный пост МПРТК, где принятые данные привязывают к центральной декартовой системе координат с началом в центральном приемном посту и к имеющимся на сопровождении МПРТК радиотехническим траекториям на множестве изолированных радиотехнических отметок, сформированном при сканировании воздушного пространства, далее на сформированном множестве радиотехнических отметок определяют координаты обнаруженного РИО путем решения разностно-дальномерной задачи по критерию максимума функции правдоподобия, а прием информации от РИО и ее последующую обработку ведут на приемных постах и на центральном посту по последовательно связанным между собой блокам, которые каналами t связи соединяют с устройством управления антеннами с датчиками приемных постов и устройством пространственно-временной синхронизации принятой ими информации, которую затем фильтруют, отличающийся тем, что в вычислительном блоке начальных координат РИО производят измерение разностей времен Δt2ц, Δt3ц, прихода сигнала и вычисление начального приближения координат  , которые по каналам связи направляют в блок вычисления функции правдоподобия для оценки координат РИО, которые формируют по правилу
, которые по каналам связи направляют в блок вычисления функции правдоподобия для оценки координат РИО, которые формируют по правилу

где  , где xi, yi - координаты ППi, x, у - координаты РИО, Δt2ц - разность времени прихода сигнала от РИО на 2-й и центральный ПП, Δt3ц - разность времени прихода сигнала от РИО на 3-й и центральный ПП, Rц2 - разность расстояний ППц - РИО и ПП2 - РИО, Rц3 - разность расстояний ППц - РИО и ПП3 - РИО,
, где xi, yi - координаты ППi, x, у - координаты РИО, Δt2ц - разность времени прихода сигнала от РИО на 2-й и центральный ПП, Δt3ц - разность времени прихода сигнала от РИО на 3-й и центральный ПП, Rц2 - разность расстояний ППц - РИО и ПП2 - РИО, Rц3 - разность расстояний ППц - РИО и ПП3 - РИО,  - вектор измерений разностей времен прихода сигнала от РИО на ПП, QR - ковариационная матрица ошибок определения времени прихода сигнала от цели i-м ПП - определяют как
- вектор измерений разностей времен прихода сигнала от РИО на ПП, QR - ковариационная матрица ошибок определения времени прихода сигнала от цели i-м ПП - определяют как
 , где
, где  ,
,  - СКО определения времени прихода сигнала от РИО i-м ПП, с* - скорость света; далее данные вычислений направляют в блок решения задачи минимизации функционала
- СКО определения времени прихода сигнала от РИО i-м ПП, с* - скорость света; далее данные вычислений направляют в блок решения задачи минимизации функционала

а затем в блок квадратичной аппроксимации функции φ(х,у) методом Ньютона в каждой точке (хk,уk)T

где  - матрица первых частных производных функции;
- матрица первых частных производных функции;
 - матрица вторых частных производных функции φ(х,у), (хk,уk)T - начальное приближение плоскостных координат х,у, при k=1 приравнивают
- матрица вторых частных производных функции φ(х,у), (хk,уk)T - начальное приближение плоскостных координат х,у, при k=1 приравнивают  , на последующих итерациях их уточняют,
, на последующих итерациях их уточняют,  - номер итерации, Τ - математический символ транспонирования; откуда данные вычислений направляют в блок определения координат РИО, где для квадратичного функционала φ(х,у) точку (хk,уk)T принимают за точку минимума, а минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона; в случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск вырождают в градиентный; для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при
- номер итерации, Τ - математический символ транспонирования; откуда данные вычислений направляют в блок определения координат РИО, где для квадратичного функционала φ(х,у) точку (хk,уk)T принимают за точку минимума, а минимум такой функции из любой начальной точки достигают за один шаг метода Ньютона; в случае линейной аппроксимации матрицу F(xk,yk) принимают единичной, и поиск вырождают в градиентный; для нелинейной унимодальной функции, отличной от квадратичной, точки последовательности при  асимптотически приближают к минимуму; условие окончания поиска принимают градиентным методом
асимптотически приближают к минимуму; условие окончания поиска принимают градиентным методом

где ε - задаваемая необходимая точность расчета; а функционал φ(х,у) преобразуют следующим образом
где C, N, K - константы, которые вычисляют по правилам



а затем частные производные определяют по формулам





где l - параметр, подбирают с учетом необходимой точности вычисления производной при условии - чем точнее необходимо вычислить производную, тем меньше должно быть l и недопустима соизмеримость разности значений функции φ(х,у) или l с абсолютной погрешностью вычисления.
2. Устройство для определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса, состоящее из приемных постов с информационными датчиками станции радиотехнической разведки, способных измерять в азимутальной плоскости направление движения воздушного объекта с излучающими радиоэлектронными средствами, оснащенных антеннами, составленных в треугольник на местности и синхронизированных между собой в пространстве и по времени посредством применения абонентского терминала ГЛОНАСС и устройства пространственно-временной синхронизации с фильтрами, отличающееся тем, что фильтры связаны с блоками вычисления начальных координат с измерением разности времен Δt2ц и Δt3ц и вычисления начального приближения координат  радиоизлучающего объекта (РИО), соединенного каналами связи с блоком вычисления функции правдоподобия
радиоизлучающего объекта (РИО), соединенного каналами связи с блоком вычисления функции правдоподобия

по данным определения вектора измерения разности времен прихода сигнала

xi, yi - координаты ППi, х, у - координаты РИО, Δt2ц - разность времени прихода сигнала от РИО на 2-й и центральный ПП, Δt3ц - разность времени прихода сигнала от РИО на 3-й и центральный ПП, Rц2 - разность расстояний ППц - РИО и ПП2 - РИО, Rц3 - разность расстояний ППц - РИО и ПП3 - РИО, с* - скорость света, и данным ковариационной матрицы ошибок определения времени прихода сигнала i-м ПП
 , где Rn - разности дальностей от источника радиоизлучающего объекта до приемного поста (ПП);
, где Rn - разности дальностей от источника радиоизлучающего объекта до приемного поста (ПП);  - среднеквадратическая ошибка (СКО) определения времени прихода сигнала от РИО i-м ПП; τi - разность прихода сигналов, измеряемая парой ПП, и
- среднеквадратическая ошибка (СКО) определения времени прихода сигнала от РИО i-м ПП; τi - разность прихода сигналов, измеряемая парой ПП, и  ; последовательно соединенного через блок решения задачи минимизации дифференцируемого функционала
; последовательно соединенного через блок решения задачи минимизации дифференцируемого функционала

с блоком квадратичной аппроксимации функции φ(х,у) в точке (хk,уk) по методу Ньютона в виде

где  - матрица первых частных производных функции, а
- матрица первых частных производных функции, а  - матрица вторых частных производных функции φ(х,у); (хk,уk)T - начальное приближение плоскостных координат х, у, (при k=1 приравнивается
- матрица вторых частных производных функции φ(х,у); (хk,уk)T - начальное приближение плоскостных координат х, у, (при k=1 приравнивается  , а на последующих итерациях (хk,уk)T уточняется);
, а на последующих итерациях (хk,уk)T уточняется);  - номер итерации; Τ - математический символ транспонирования, и окончательно с блоком определения координат РИО по условию
- номер итерации; Τ - математический символ транспонирования, и окончательно с блоком определения координат РИО по условию

где ε - задаваемая необходимая точность расчета, после преобразования функционала φ(х,у) в следующем виде
 где
где



а частные производные





где l - параметр необходимой точности вычисления производной.
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| Способ отождествления позиционных измерений и определения местоположения воздушных объектов в многопозиционной радионавигационной системе с использованием многолучевых радиопередатчиков | 2018 |
|
RU2703987C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| УСТРОЙСТВО ДЛЯ ИНКУБАЦИИ ИКРЫ "ДОН-2" | 1995 |
|
RU2091018C1 |
| WO 2014149092 A2, 25.09.2014 | |||
| US 5719584 A, 17.02.1998. | |||

