Изобретение относится к радиолокационным устройствам для подповерхностного зондирования.
Известно радиолокационное устройство для определения местоположения скрытых под поверхностью оптически непрозрачной среды объектов (авт. свид. СССР 205174, МПК6 Н 05 D, опубл. 13.11.1967, бюл. 29), в его состав входят антенное устройство из передающей и приемной антенн, передатчик, подключенный одним выходом к передающей антенне, а другим - к устройству регистрации, и приемник, вход которого подключен к выходу приемной антенны, а выход соединен со входом устройства регистрации; кроме того, модулятор. В этом радиолокационном устройстве определение местоположения зондируемого объекта на поверхности по поперечным координатам определяется по местоположению антенной системы (в частности, приемной антенны), при котором регистрируются наибольшие величины эхосигналов, а по дальности (глубине) - сравнением непрерывных излучаемого зондирующего опорного и отраженного объектом сигналов. Это известное устройство будем считать прототипом.
Наличие в составе прототипа модулятора, двух антенн делает его громоздким и сложным в изготовлении и вследствие этого относительно дорогим. Устройство-прототип, однако, не позволяет определить, содержатся ли в составе зондируемого объекта нелинейные элементы типа транзисторов, диодов и др.
Техническим результатом, получаемым при осуществлении изобретения, является упрощение устройства и расширение функциональных возможностей таким построением радиолокационного измерителя местоположения, которое обеспечило бы дополнительно регистрацию скрытых под поверхностью объектов, содержащих нелинейные элементы.
Технический результат достигается тем, что в устройстве вместо передающей и приемной антенн использован моноимпульсный облучатель с диэлектрическим наполнением; дополнительно введено управляемое переключающее устройство с тремя входами и одним выходом, к первому входу которого подключен выход передатчика, а ко второму и третьему входам - суммарный и разностный выходы моноимпульсного облучателя соответственно, а выход переключающего устройства соединен с входом приемника, причем переключающее устройство выполнено так, чтобы при подаче сигнала передатчика на суммарный выход моноимпульсного волноводного облучателя на выход переключающего устройства подается сигнал с разностного выхода моноимпульсого облучателя, а при подаче сигнала передатчика на разностный выход моноимпульсного волноводного облучателя на выход переключающего устройства подается сигнал с суммарного выхода моноимпульсного облучателя.
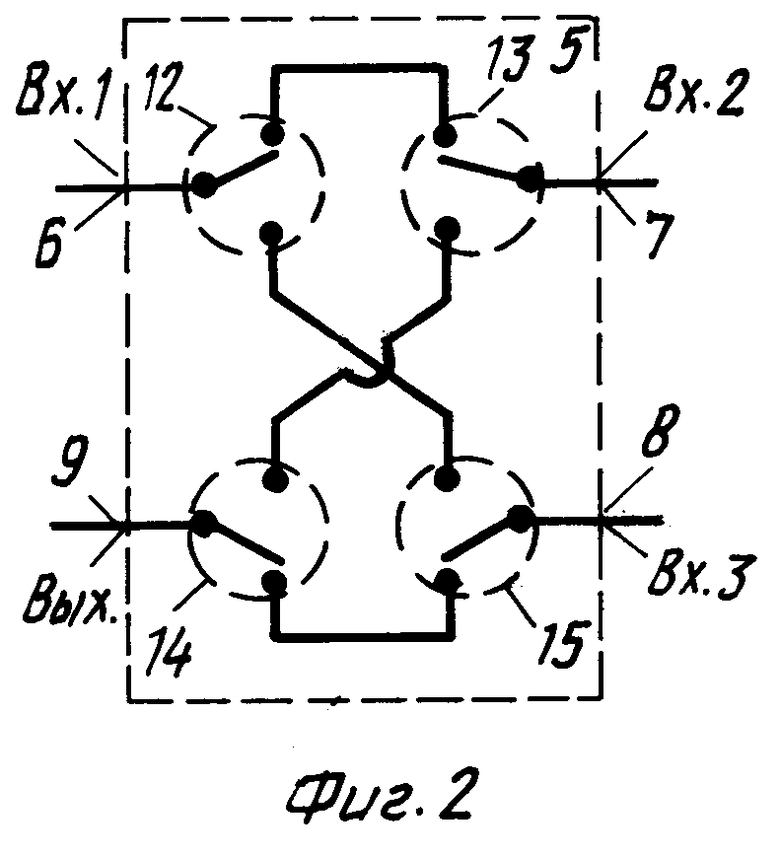
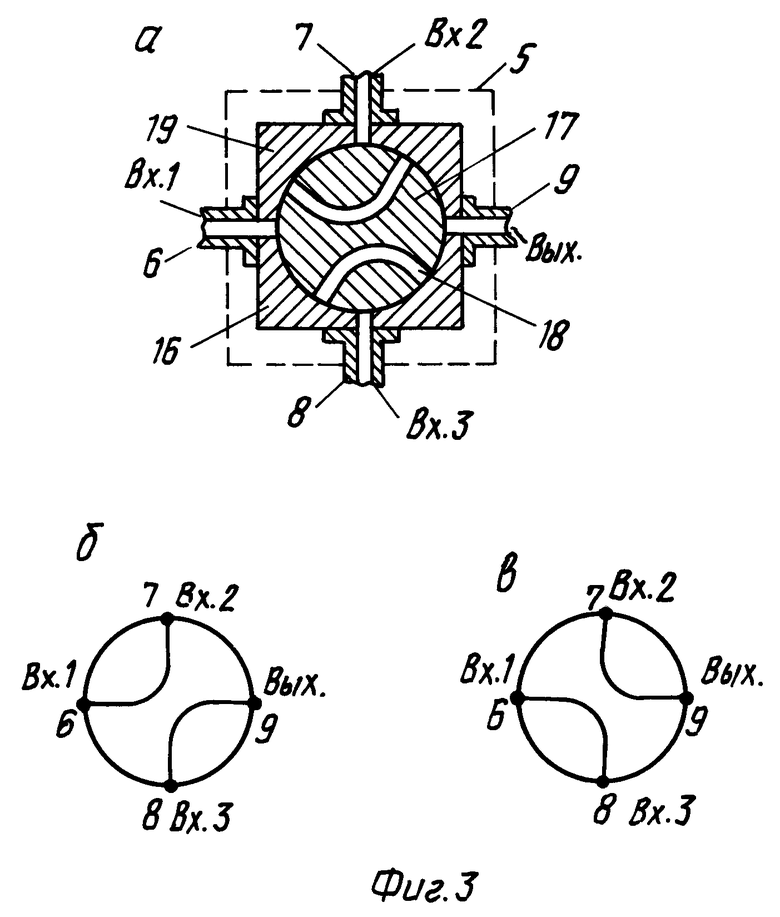
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 - принципиальная схема управляемого переключающего устройства для варианта его построения из более простых двухканальных переключателей; на фиг.3 - возможный вариант управляемого переключающего устройства в волноводном исполнении с механическим управлением, а также состояния переключающего устройства.
Устройство содержит передатчик 1, антенное устройство, выполненное в виде моноимпульсного волноводного облучателя 2, приемник 3, выход которого подсоединен к устройству регистрации 4, и управляемое переключающее устройство 5 с тремя входами 6, 7, 8 и одним выходом 9. К первому входу 6 управляемого переключающего устройства 5 подключен выход передатчика 1, а ко второму 7 и третьему 8 входам - суммарный 10 и разностный 11 выходы моноимпульсного облучателя 2 соответственно, а выход 9 управляемого переключающего устройства соединен с входом приемника 3. Как и в прототипе, волноводный моноимпульсный облучатель 2 выполнен с диэлектрическим наполнением, которое выбирается по возможности соответствующим диэлектрику оптически непрозрачной зондируемой подповерхностной среды. Управляемое переключающее устройство 5 выполнено так, чтобы при подаче сигнала передатчика на суммарный выход 10 моноимпульсного волноводного облучателя 2 на выход 9 управляемого переключающего устройства, т.е. на приемник, подается сигнал с разностного выхода 11 моноимпульсого облучателя, а при подаче сигнала передатчика на разностный выход 11 моноимпульсного облучателя 2 на выход 9 управляемого переключающего устройства подается сигнал с суммарного выхода 10 моноимпульсного облучателя 2. Это поясняется фиг.2, на которой показана принципиальная схема управляемого переключающего устройства 5 (пунктирный прямоугольник) для варианта его построения из четырех более простых двухканальных переключателей 12, 13, 14 и 15 (пунктирные окружности). В первом состоянии, например при верхнем положении переключателей 12, 13 и одновременно переключателей 14, 15 в нижнем положении, сигнал передатчика с первого входа 6 переключающего устройства 5 передается на его второй вход 7, т.е. подается на суммарный выход моноимпульсного волноводного облучателя 2; в этом же состоянии сигнал с разностного выхода 11 моноимпульсого облучателя передается на выход 9 переключающего устройства, т.е. на приемник. Во втором состоянии переключателя 5, т. е. нижнем положении переключателей 12, 13 и одновременно переключателей 14, 15 в верхнем положении, сигнал передатчика с первого входа 6 переключающего устройства 5 передается на его третий вход 8, т.е. подается на разностный выход моноимпульсного волноводного облучателя; в этом же состоянии на выход 9 переключающего устройства 5, т.е. на приемник, подается сигнал с суммарного выхода моноимпульсого облучателя. В состав управляемого переключающего устройства 5 в волноводном исполнении (фиг.3а, пунктирный квадрат) с механическим управлением входит статор 16 с волноводными входами 6, 7, 8 и выходом 9, а также ротор 17 с двумя волноводами 18 и 19. В первом из двух состояний, например при положении ротора 17, показанном на фиг.3б, сигнал передатчика с первого входа 6 переключающего устройства 5 передается на его второй вход 7, т. е. подается на суммарный выход моноимпульсного волноводного облучателя; в этом же состоянии сигнал с разностного выхода моноимпульсного облучателя передается на выход 9 переключающего устройства 5, т.е. на приемник. Во втором состоянии переключателя 5, показанном на фиг. 3в, сигнал передатчика с первого входа 6 переключающего устройства 5 передается на его третий вход 8, т.е. подается на разностный выход моноимпульсного волноводного облучателя; в этом же состоянии на выход 9 переключающего устройства 5, т.е. на приемник, подается сигнал с суммарного выхода моноимпульсого облучателя. Использование в составе антенного устройства моноимпульсного облучателя вместо двух антенн (передающей и приемной) приводит к существенному упрощению антенного устройства и, следовательно, измерителя в целом.
Устройство работает следующим образом. В первом состоянии переключающего устройства 5 генерируемый передатчиком монохроматический электромагнитный сигнал подается на суммарный выход 10 моноимпульсного облучателя 2 и излучается им как радиосигнал в пространство оптически непрозрачной среды под поверхностью раздела. Этот зондирующий радиосигнал облучает объект, скрытый под поверхностью раздела, отражается им и далее преобразуется моноимпульсным облучателем 2 в электромагнитные сигналы на его суммарном 10 и разностном выходах 11. Последний далее подается на выход переключающего устройства 5, т.е. в приемник 3, которым преобразуется (усиливается и детектируется) в электрический сигнал, поступающий в устройство регистрации 4. Во втором состоянии переключающего устройства 5 генерируемый передатчиком монохроматический электромагнитный сигнал подается на разностный выход 11 моноимпульсного облучателя 2, излучается им как радиосигнал в пространство оптически непрозрачной среды под поверхностью раздела. Этот зондирующий радиосигнал облучает объект, скрытый под поверхностью раздела, отражается им и далее преобразуется моноимпульсным облучателем 2 в электромагнитные сигналы на его суммарном 10 и разностном выходах 11. Первый далее подается на выход переключающего устройства 5, т. е. в приемник 3, которым преобразуется (усиливается и детектируется) в электрический сигнал, поступающий в устройство регистрации 4. По результатам регистрации электрических сигналов для какого-либо одного состояния переключающего устройства 5 и различным положениям антенной системы на поверхности раздела, подобно тому, как это делается для устройства-прототипа, судят о местоположении зондируемого объекта в плоскости раздела - по двум поперечным координатам, но в отличие от прототипа не по максимуму, а по минимуму эхосигнала.
Расширение функциональных возможностей достигается тем, что сигналы, отраженные зондируемым объектом и регистрируемые переключающим устройством 5 для одного и того же положения моноимпульсного облучателя на плоскости раздела, но для разных состояний переключающего устройства 5, вообще говоря, различны по уровню в том случае, если объект содержит нелинейные элементы - диоды, транзисторы и др. Эта разница возникает из-за того, что в первом состоянии переключающего устройства 5 мощность радиосигнала, облучающего зондируемый объект, больше, чем мощность радиосигнала, облучающего зондируемый объект во втором состоянии переключающего устройства 5, т.к. в первом случае диаграмма излучения суммарная, а во втором разностная. Но переизлучающие свойства объекта, содержащего нелинейности, всегда зависят от уровня облучающего его радиосигнала. Иначе говоря, передаточные свойства системы "суммарный выход моноимпульсного облучателя - зондируемый объект - разностный выход моноимпульсного облучателя" не удовлетворяют принципу взаимности (см. , например, X.Мейнке и Ф.В.Гундлах. Радиотехнический справочник. Том 1. Пер. с нем. Государств. Энергетическое Изд-во, Москва - Ленинград, 1960, с.289-290).
Таким образом, в предлагаемом радиолокационном устройстве, как и в устройстве-прототипе, регистрируются переотраженные зондируемым объектом сигналы в зависимости от положений антенной системы на плоскости раздела. Но в отличие от устройства-прототипа предусмотрена регистрация этих зависимостей при существенно различных уровнях облучающих зондируемый объект радиосигналов и регистрация разницы в отражающих свойствах объектов для различных уровней зондирующих сигналов. При отсутствии такой разницы делается вывод об отсутствии нелинейных элементов в составе зондируемых объектов; в противном случаи - об их наличии. В этом и состоит расширение функциональных возможностей предлагаемого устройства в сравнении с известным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсный облучательКРугОВОй пОляРизАции | 1978 |
|
SU815799A1 |
| АНТЕННОЕ УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2020 |
|
RU2745734C1 |
| АНТЕННАЯ СИСТЕМА | 2009 |
|
RU2391751C1 |
| АНТЕННА БОРТОВОГО РАДИОЛОКАТОРА | 2003 |
|
RU2260230C1 |
| УГЛОВОЙ ДИСКРИМИНАТОР | 2002 |
|
RU2202806C1 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ БОРТОВОЙ МОНОИМПУЛЬСНОЙ РЛС И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2268478C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
Использование: для определения местоположения объектов, скрытых под поверхностью оптически непрозрачных сред. Радиолокационный измеритель местоположения объектов содержит передатчик, антенное устройство и приемник, выход которого подключен к устройству регистрации. Антенное устройство выполнено в виде одноплоскостного волноводного моноимпульсного облучателя с диэлектрическим наполнением. Переключающее устройство выполнено так, что при подаче сигнала передатчика на суммарный выход моноимпульсного волноводного облучателя на выход переключающего устройства подается отраженный объектом сигнал с разностного выхода моноимпульсного облучателя, а при подаче сигнала передатчика на разностный выход моноимпульсного облучателя на выход управляемого переключающего устройства подается отраженный объектом сигнал с суммарного выхода моноимпульсного облучателя. Радиолокационный измеритель местоположения имеет два режима работы, отличающиеся уровнем мощности зондирующего радиосигнала, облучающего объект. При подключении передатчика к суммарному выходу моноимпульсного облучателя уровень мощности больше, чем при подключении его к разностному выходу. Поэтому наличие в составе объекта нелинейных элементов приводит к различию в величинах отражаемых объектом радиосигналов. Регистрация этих различий и позволяет отличить объект, содержащий нелинейные элементы, от объекта, не содержащего их. Технический результат: упрощение устройства и расширение функциональных возможностей путем обеспечения регистрации объектов, содержащих нелинейные элементы. 3 ил.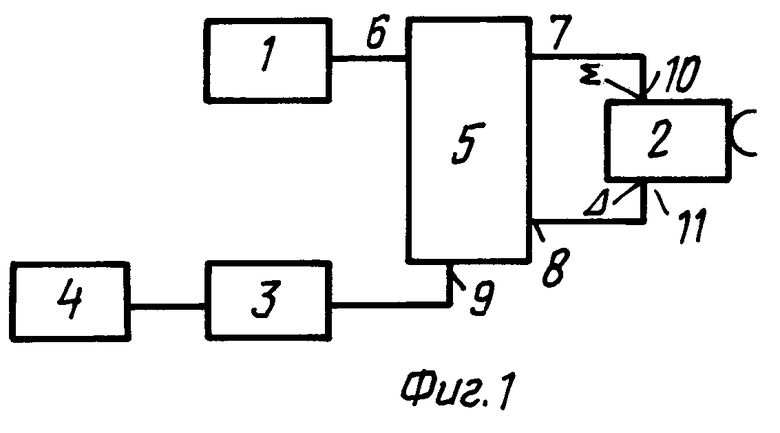
Радиолокационный измеритель местоположения объектов под поверхностью оптически непрозрачных сред, содержащий передатчик, антенное устройство и приемник, выход которого подключен к устройству регистрации, отличающийся тем, что антенное устройство выполнено в виде моноимпульсного волноводного облучателя с диэлектрическим наполнением, дополнительно введено управляемое переключающее устройство с тремя входами и одним выходом, к первому входу которого подключен выход передатчика, а ко второму и третьему входам - суммарный и разностный выходы моноимпульсного облучателя соответственно, а выход управляемого переключающего устройства соединен с входом приемника, причем переключающее устройство выполнено так, чтобы при подаче сигнала передатчика на суммарный выход моноимпульсного волноводного облучателя на выход переключающего устройства подается сигнал с разностного выхода моноимпульсного облучателя, а при подаче сигнала передатчика на разностный выход моноимпульсного облучателя на выход управляемого переключающего устройства подается сигнал с суммарного выхода моноимпульсного облучателя.
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1996 |
|
RU2100825C1 |
| US 4831331 А, 16.05.1989 | |||
| Способ радиолокационного обнаружения предвестников тектоактивности и устройство для его осуществления | 1990 |
|
SU1806394A3 |
| US 5345179 А, 06.09.1994. | |||
