Предлагаемые изобретения относятся к радиолокации и могут быть использованы при разработке устройств встроенного контроля моноимпульсных бортовых радиолокационных станций (МБРЛС), в которых реализуется как когерентная, так и некогерентная обработка сигналов.
Известен ([1], с.150-151, рис.6.5) способ встроенного контроля радиолокационных станций (РЛС), состоящий в том, что с помощью переключателя «Работа-контроль» выход передатчика отключают от входа антенны и подключают к последовательно соединенным направленному ответвителю и согласованной нагрузке, включают подключенное к выходу смесителя системы автоматической подстройки частоты (АПЧ) устройство контроля, обеспечивающее циркуляцию импульсов промежуточной частоты fпр, для получения задержанного импульса, преобразуют его с помощью гетеродина, генерирующего частоту fг, и смесителя АПЧ в сверхвысокочастотные (СВЧ) колебания частот fm=fг+mfпр, где m=1...n, подают эти СВЧ колебания через вентили, направленный ответвитель, переключатель «Работа-Контроль» и устройство защиты приемника на вход смесителя сигнала и оценивают энергетический потенциал РЛС и точность измерения дальности.
Недостаток этого способа организации встроенного контроля МБРЛС состоит в том, что он непригоден для встроенного контроля когерентных МБРЛС, т.к. частоты передатчика и гетеродина некогерентны, а в некогерентных МБРЛС оценивается лишь энергетический потенциал и дальномерный канал и не проверяются ошибки измерения углов азимута α и места β, вносимые антенной и формирователями (волноводными мостами) суммарного и разностных каналов МБРЛС.
Близким техническим решением, позволяющим устранить этот недостаток, является способ, реализованный в [2] и заключающийся в том, что вводят генератор внутреннего контрольного сигнала (ВКС) и контрольный ответчик, который устанавливают вне наземной РЛС в точке, азимутальная координата αэ которой известна с высокой точностью, подводят к контрольному ответчику сигнал передатчика, измеряют штатными средствами РЛС угол азимута αи контрольного ответчика, сравнивают его с известным значением угла азимута контрольного ответчика αэ и вычисляют фазовую ошибку Δ=|αэ-αи| в сквозных каналах, которую устраняют средствами РЛС или учитывают при последующей обработке информации об измеренных углах азимута α и места β.
Этот способ основан на том, что, как показано в [3], с.5-37, результаты измерений диаграммы направленности антенны (ДНА) в дальней зоне совпадают с результатами измерения ДНА при установке вспомогательной антенны (зонда) в ближней зоне, если:

где S - площадь зонда, облучающего испытуемую антенну;
λ - длина волны РЛС;
Д - удаление зонда от плоскости раскрыва апертуры исследуемой антенны.
При работе РЛС в 3-см диапазоне радиоволн эти требования сводятся к тому, чтобы S≤56 мм2, а Д≥300 мм, т.е. эти требования к зонду и месту его установки могут быть выполнены, если зонд представляет собой полуволновый вибратор (диполь), имеющий длину вибраторов  мм и диаметр 2 мм, т.е. площадь сечения S=2·7,5·2=30 мм2 и установлен на расстоянии Д=300 мм. Однако фидер, с помощью которого подводится СВЧ энергия к зонду, может внести существенные искажения ДНА.
мм и диаметр 2 мм, т.е. площадь сечения S=2·7,5·2=30 мм2 и установлен на расстоянии Д=300 мм. Однако фидер, с помощью которого подводится СВЧ энергия к зонду, может внести существенные искажения ДНА.
Поэтому предпочтителен способ, реализованный в [4] (прототип), когда зонд, выполненный в виде диполя, устанавливают в точку, координаты которой известны с высокой точностью, облучают его СВЧ сигналами контрольного генератора, в качестве которых могут быть использованы и задержанные СВЧ колебания передатчика МБРЛС, принимают отраженные зондом сигналы, измеряют углы места и азимута диполя, сравнивают их с известными и вычисляют ошибки измерения углов азимута α и места β.
Недостатком этого способа встроенного контроля МБРЛС, установленной на ракете, является тот факт, что помимо сигналов, отраженных от диполя, антенна МБРЛС после установки ракеты на носитель (корабль, подводную лодку или самолет) будет принимать сигналы, отраженные элементами конструкции носителя, что может привести к погрешностям измерения потенциала, углов азимута и места. Кроме того, в ряде случаев накладываются ограничения на скрытность проведения проверок, что не позволяет облучать зонд СВЧ колебаниями частоты МБРЛС.
Целью предлагаемого изобретения является повышение полноты, достоверности и скрытности встроенного контроля моноимпульсных бортовых радиолокационных станций при проведении регламентных или предстартовых проверок МБРЛС после установки ракеты, в состав которой входит МБРЛС, на носитель.
Поставленная цель достигается тем, что зонд изготавливают в виде полуволнового вибратора, плечи которого подключены к нелинейному элементу, и устанавливают в расчетной точке носителя ракеты или обтекателя антенны, подключают переключателем «Работа-Контроль» выход передатчика МБРЛС, генерирующего СВЧ колебания частоты fc к детектору мощности, включают передатчик МБРЛС и оценивают его мощность, формируют сверхвысокочастотные колебания, частота которых fo в n раз меньше частоты fc, задерживают их относительно СВЧ колебаний передатчика, усиливают их, фильтруют и облучают ими зонд, принимают штатными средствами моноимпульсной бортовой радиолокационной станции переизлученные нелинейным зондом сверхвысокочастотные колебания частоты fc, измеряют дальность, углы азимута места и установки зонда, вычисляют погрешности измерения дальности, углов азимута и места, запоминают их и принимают решение о работоспособности моноимпульсной бортовой радиолокационной станции, если мощность передатчика не ниже заданной, а погрешности измерения дальности, углов азимута и места меньше допустимых.
Сущность предлагаемого способа встроенного контроля МБРЛС состоит в том, что для повышения полноты контроля, скрытности и устранения влияния элементов конструкции носителя ракеты, на которой установлена МБРЛС, зонд выполняют в виде полуволнового вибратора, плечи которого подключены к нелинейному элементу, устанавливают зонд в расчетной точке обтекателя антенны или носителя, облучают зонд СВЧ колебаниями, несущая частота fo которых в n раз ниже несущей частоты fc МБРЛС, принимают и обрабатывают СВЧ сигналы, излученные зондом на частоте fc.
В этом случае отражения от элементов конструкции носителя происходят на частоте fo, которая значительно ослабляется приемником и не оказывает влияния на работу МБРЛС.
Сравнение заявляемого способа встроенного контроля с прототипом показывает наличие дополнительных действий:
- установку в расчетной точке обтекателя антенны или носителя зонда в виде полуволнового вибратора, плечи которого подключены к нелинейному элементу;
- установку вспомогательной антенны, излучающей СВЧ колебания частоты fo;
- формирование СВЧ колебаний, несущая частота которых fo в n раз меньше несущей частоты fc передатчика;
- задержку этих колебаний с помощью твердотельной линии задержки, последующее их усиление, фильтрацию и подведение к вспомогательной антенне;
- облучение зонда задержанными колебаниями, излучаемыми вспомогательной антенной;
- прием штатной антенной переизлученных зондом СВЧ колебаний на частоте fc;
- измерение углов азимута и места установки зонда и имитируемой дальности;
- вычисление погрешностей определения дальности, углов азимута и места.
Введение подобных действий для повышения полноты контроля МБРЛС из общедоступных источников не известно, что позволяет сделать вывод о соответствии предлагаемых способа и устройств для его реализации критерию «Новизна».
Вновь вводимые блоки, необходимые для реализации предлагаемого способа, известны и описаны в технической литературе.
В качестве переключателя включателя «Работа-Контроль» могут быть использованы как механические устройства, описанные в [1], с.150-151, так и устройства на pin-диодах [6], с.50-71. Делители частоты описаны в [7], твердотельные линии задержки - в [8], с.215. В качестве усилителя мощности могут быть использованы отечественные квазимонолитные интегральные модули типа 26Х3, каждый из которых имеет коэффициент усиления до 16 дБ [9], с.102-103.
В качестве вспомогательной антенны может быть использована полосковая антенна.
Зонд может быть выполнен в виде полуволнового вибратора, длина l плеч которого выбирается в соответствии с [5] из условия
l=(0,2-0,7)λ0,

где с - скорость света.
В качестве нелинейного элемента, к которому подключают плечи полуволнового вибратора, может быть использован любой СВЧ диод, рассчитанный на применение в качестве умножителя на частотах выше частоты fc.
Сущность предлагаемых изобретений поясняется дальнейшим описанием и чертежами, на которых в качестве примера технического воплощения предложенного способа проведения встроенного контроля МБРЛС, подтверждающего возможность его промышленной применяемости, представлены:
- фиг.1 - функциональная схема организации встроенного контроля МБРЛС;
- фиг.2 - функциональная схема устройства встроенного контроля МБРЛС, в которых для формирования излучаемой частоты fc не применяется умножение опорной частоты;
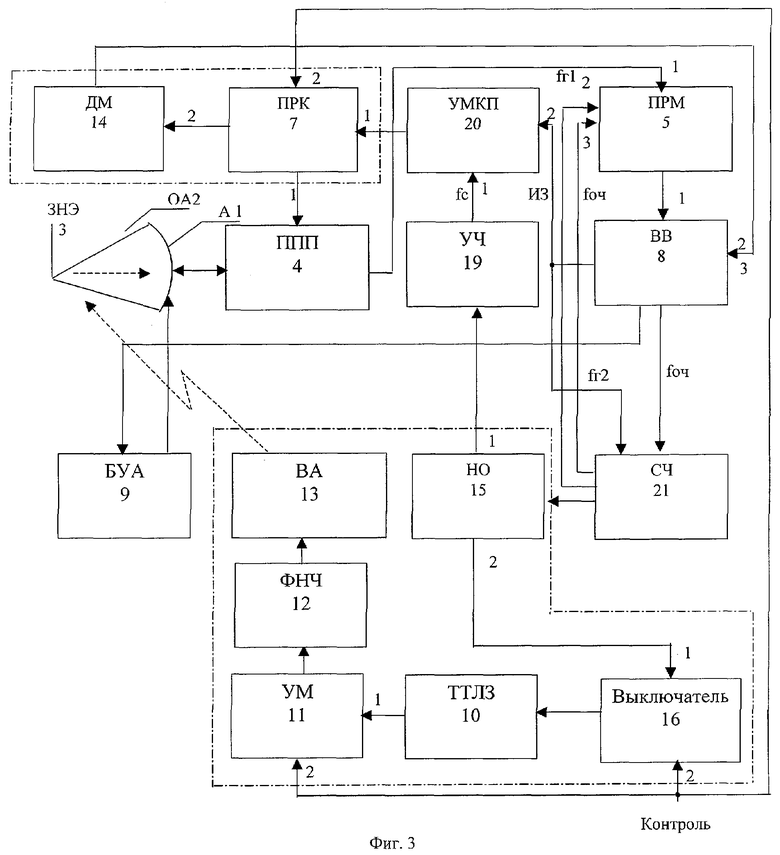
- фиг.3 - функциональная схема встроенного контроля МБРЛС, в которых излучаемая частота fc получается за счет умножения частоты генератора опорного сигнала.
На фиг.1 применены следующие обозначения:
1 - антенна (А);
2 - антенный обтекатель (АО);
3 - зонд с нелинейным элементом (ЗНЭ);
4 - переключатель прием-передача (ППП);
5 - приемник (ПРМ);
6 - передатчик (ПРД);
7 - переключатель «Работа-Контроль» (ПРК);
8 - вычислитель-возбудитель (ВВ);
9 - блок управления антенной (БУА);
10 - твердотельная линия задержки (ТТЛЗ);
11 - усилитель мощности (УМ);
12 - фильтр низких частот (ФНЧ);
13 - вспомогательная антенна (ВА);
14 - детектор мощности (ДМ).
Связи между указанными блоками соответствуют приведенным на фиг.1. Пунктирными линиями отмечены связи по радиоканалу.
На фиг.2 приняты следующие обозначения:
1 - антенна (А);
2 - антенный обтекатель (АО);
3 - зонд с нелинейным элементом (ЗНЭ);
4 - переключатель прием-передача (ППП);
5 - приемник (ПРМ);
6 - передатчик (ПРД);
7 - переключатель «Работа-Контроль» (ПРК);
8 - вычислитель-возбудитель (ВВ);
9 - блок управления антенной (БУА);
10 - твердотельная линия задержки (ТТЛЗ);
11 - усилитель мощности (УМ);
12 - фильтр низких частот (ФНЧ);
13 - вспомогательная антенна (ВА);
14 - детектор мощности (ДМ);
15 - направленный ответвитель (НО);
16 - выключатель (В);
17 - делитель частоты на n (ДЧ);
18 - полосовой фильтр (ПФ).
Связи между указанными блоками соответствуют приведенным на фиг.2. Пунктирными линиями отмечены связи по радиоканалу.
На фиг.3 приняты следующие обозначения:
1 - антенна (А);
2 - антенный обтекатель (АО);
3 - зонд с нелинейным элементом (ЗНЭ);
4 - переключатель прием-передача (ППП);
5 - приемник (ПРМ);
7 - переключатель «Работа-Контроль» (ПРК);
8 - вычислитель-возбудитель (ВВ);
9 - блок управления антенной (БУА);
10 - твердотельная линия задержки (ТТЛЗ);
11 - усилитель мощности (УМ);
12 - фильтр низких частот (ФНЧ);
13 - вспомогательная антенна (ВА);
14 - детектор мощности (ДМ);
15 - направленный ответвитель (НО);
16 - выключатель;
19 - умножитель частоты (УЧ);
20 - усилитель мощности канала передатчика (УМКП);
21 - синтезатор частот (СЧ).
Связи между указанными блоками соответствуют приведенным на фиг.3, при этом пунктирными линиями изображены связи по радиоканалу.
Встроенный контроль осуществляется следующим способом (фиг.1). ВВ 8 формирует сигналы несущей частоты fc, импульсы запуска передатчика ИЗ, поступающие на ПРД 6, сигналы гетеродина (ов) fг и опорной частоты fоч, поступающие на ПРМ 5, и сигналы частоты

где n - коэффициент деления частоты, n=2, 3, 4.
При этом колебания частоты fo формируются одновременно с импульсом ИЗ только при поступлении на вход 2 ВВ 8 команды «Контроль». При поступлении команды «Контроль» ПРК 7 подключает выход ПРД 6 к ДМ 14, создающему напряжение Uм, пропорциональное поступающей мощности и поступающее на первый вход ВВ 8, формирующего сигнал об исправности передатчика 6, если Uм превышает пороговый уровень, соответствующий минимально допустимой излучаемой мощности Рмин.
Сигналы частоты fo поступают на вход ТТЛЗ 10, задерживаются на время, соответствующее, например, минимально измеряемой дальности МБРЛС, усиливаются УМ 11 и фильтруются ФНЧ 12, предназначенным для ослабления гармоник частоты fo, возникающих на выходе УМ 11, излучаются ВА 13 и облучают ЗНЭ 3, который предпочтительно устанавливать на обтекателе 2 антенны 1, соблюдая при этом соотношение (2). Если же соотношение (2) не выполняется, то следует зонд размещать в расчетной точке носителя, удаленной от плоскости раскрыва антенны на дальность Д≥10λ. Облученный зонд переизлучает ответный сигнал на частоте fc=nfo, который принимается антенной 1, усиливается приемником 5 и обрабатывается ВВ 8.
Таким образом, с помощью дополнительно введенных блоков 3, 10, 11, 12 и 13 формируются СВЧ сигналы, задержанные относительно сигналов передатчика 6 на время, определяемое временем задержки ТТЛЗ 10, и поступающие с определенного направления. Эти сигналы принимаются антенной 1, через ППП 4 поступают на ПРМ 5, усиливаются, преобразуются в соответствии с штатными алгоритмами и поступают на третий вход ВВ 8, который определяет дальность Du, углы азимута αu и места βu и вычисляют погрешности их измерения как
ΔD=Dp-Du;
Δα=αp-αu;
Δβ=βp-βu;
где Dp, αp и βр - расчетные значения дальности, углов азимута и места, соответственно.
Эти ошибки могут быть отработаны или учтены при штатной работе МБРЛС.
Оценим предъявляемые к блокам требования, необходимые для реализации этого способа встроенного контроля.
В соответствии с методикой, изложенной в [5], с.7-14, принятая антенной 1 мощность сигнала Рпра на частоте fc, например при n=2, может быть определена как

где Ризл, Gизл - мощность, излучаемая вспомогательной антенной, и коэффициент ее усиления, соответственно;
Ga - коэффициент усиления антенны МБРЛС на частоте fc;
λо - длина волны сигнала, излученного вспомогательной антенной;

где с - скорость света;
r - расстояние между нелинейным элементом и вспомогательной антенной;
Gвибр пр, Gвибр изл - коэффициенты усиления антенны зонда на частотах fo и fc, соответственно;
ξ2 (λо, Рпр) - коэффициент нелинейного преобразования, зависящий от мощности Рпр, воздействующей на нелинейный элемент зонда 3.
В этом выражении первая дробь представляет собой мощность Рпр, поступающую на нелинейный элемент, а выражение, заключенное в квадратную скобку, - формируемую им мощность.
В первом приближении можно считать, что Gвибр пр=Gвибр изл, а

где К - коэффициент, зависящий от типа нелинейного элемента и воздействующей частоты; согласно [5] К=2·10-5.
С учетом (4) выражение (3) имеет вид

После преобразования выражения (5) получим следующую формулу для расчета мощности Ризл, излучаемой вспомогательной антенной 13

Будем считать, что зонд представляет классический полуволновый вибратор, плечи которого подключены к диоду, и имеющий длину плеча, способную как принимать колебания частоты fo, так и излучать колебания частоты fоп.
Примем Gвибр пр=Gвибр изл=5, Ga=300, r=0,3 м, Рпра=2·10-12 Вт, λо=6 см, Gизл=10.
Тогда

При такой излучаемой мощности на нелинейный элемент поступает мощность

Если считать, что создаваемая ВВ 8 мощность колебаний на частоте

а затухание ТТЛЗ 10 равно 50 дБ (NТТЛЗ=10-5), то для получения выходной мощности Ризл=0,1 Вт коэффициент усиления усилителя мощности должен быть не менее
или 10·lg Ку≈50 дБ.
Получение такого коэффициента усиления не представляет трудностей. Основными погрешностями измерения потенциала Nпот МБРЛС являются погрешность Nq ДМ 14, нестабильности Nм коэффициента усиления УМ 11, нестабильность Nз затухания ТТЛЗ 10 и нестабильность Nк коэффициента К зонда 3.
Считая, что указанные погрешности независимы, можно получить

Если, например, Nq=Nм=Nз=Nк=3 дБ, то Nпот=6 дБ, которая близка к погрешности оценки потенциала известными методами и может быть уменьшена, если в этом возникнет потребность.
Основное достоинство предлагаемого способа встроенного контроля состоит в том, что без излучения на основной частоте fc, которое в ряде случаев не допускается, определяются погрешность измерения углов азимута и места, вносимые антенной, неидентичностью характеристик формирователей сигналов суммарного и разностного каналов, а также ошибки дальномерного канала.
Предлагаемый способ может быть применен как для контроля МБРЛС, использующих как простой сигнал, так и сложный сигналы (внутриимпульсную линейную частотную и фазовую модуляцию).
Функциональная схема устройства, реализующего предлагаемый способ встроенного контроля некогерентных МБРЛС, приведена на фиг.2.
Встроенный контроль осуществляется следующим образом. При поступлении команды «Контроль» ПРК 7 подключает выход ПРД 6 через НО 15 к ДМ 14, а выключатель 16 подключает второй выход НО 15 к входу ДЧ 17. При включении ПРД 6 его СВЧ колебания частоты fс через выход 1 НО 15 поступают на ДМ 14, формирующий напряжение Uм, пропорционально подводимой мощности и поступающее на вход 2 ВВ 8, создающего сигнал работоспособности передатчика, если Uм≥ пороговому напряжению.
Снимаемые с выхода 2 НО 15 СВЧ колебания через выключатель 16 поступают на ДЧ 17, осуществляющий деление частоты fc в n раз. Выходной сигнал ДЧ 17 частоты  через полосовой фильтр 18 поступает на ТТЛЗ 10, задерживается на время, соответствующее минимально измеряемой дальности МБРЛС, усиливается УМ 11, фильтруются ФНЧ 12, излучается вспомогательной антенной 13 и облучает ЗНЭ 3, содержащий нелинейный элемент, формирующий гармоники частоты fo.
через полосовой фильтр 18 поступает на ТТЛЗ 10, задерживается на время, соответствующее минимально измеряемой дальности МБРЛС, усиливается УМ 11, фильтруются ФНЧ 12, излучается вспомогательной антенной 13 и облучает ЗНЭ 3, содержащий нелинейный элемент, формирующий гармоники частоты fo.
Гармоника частоты fo, равная частоте сигнала fc, принимается антенной 1 и через ППП 4 поступает на ПРМ 5, усиливается, преобразуется и обрабатывается в соответствии с штатными алгоритмами. Результаты обработки поступают на ВВ 8, который определяет дальность Дик, углы азимута αик и места βик и вычисляет погрешности их измерения как
ΔД=Др-Дик;
Δα=αр-αик;
Δβ=βр-βик;
где Др, αp, βр - расчетные значения дальности углов места и азимута, соответственно.
Вычисленные погрешности могут быть запомнены в ВВ 8 и учтены при штатной работе по реальным целям, когда в контур управления выдается информация
Д=Ди-ΔД;
α=αи-Δα;
β=βи-Δβ,
где Ди, αи, βи - соответственно дальность, углы азимута и места, измеренные при штатной работе по реальным целям.
Достоинством предлагаемого метода встроенного контроля является высокая полнота контроля и скрытность.
Однако, как показано в [7], в настоящее время выпускаются делители частоты, имеющие верхнее значение частоты fв=18 ГГц.
Успехи в области микроэлектроники позволяют надеяться, что верхнее значение делителей частоты может быть увеличено до 30-40 ГГц, что позволит использовать этот метод и для проверки некогерентных МБРЛС, работающих в мм диапазоне.
Вместе с тем, следует отметить, что в настоящее время используются, как правило, когерентные МБРЛС, в которых СВЧ сигналы формируются путем умножения и последующего усиления сигналов, создаваемых синтезаторами частот, как это описано, например, в [10].
В этом случае встроенный контроль с использованием зонда с нелинейным элементом может быть осуществлен по схеме, приведенной на фиг.3. Устройство работает следующим образом. ВВ 8 формирует импульсы запуска (ИЗ) передатчика и непрерывные колебания опорной частоты fоч, под действием которых СЧ 21 формирует частоту (частоты) гетеродина (гетеродинов) fг1, fг2 и возникающие во время действия ИЗ импульсы СВЧ колебаний на частоте  , которые через первый выход НО 15 поступают на УЧ 19. Снимаемые с выхода УЧ 19 СВЧ частоты колебания fc усиливаются УМКП 20 и подводятся через ПРК 7 к ДМ 14, формирующему напряжение Uм, пропорциональное подводимой мощности и поступающее на второй вход ВВ 8, выдающему сигнал работоспособности передатчика, если Uм≥ пороговому напряжению.
, которые через первый выход НО 15 поступают на УЧ 19. Снимаемые с выхода УЧ 19 СВЧ частоты колебания fc усиливаются УМКП 20 и подводятся через ПРК 7 к ДМ 14, формирующему напряжение Uм, пропорциональное подводимой мощности и поступающее на второй вход ВВ 8, выдающему сигнал работоспособности передатчика, если Uм≥ пороговому напряжению.
Снимаемые со второго выхода НО 15 сигналы частоты fo поступают на выключатель 16, на второй вход которого в режиме «Контроль» подается управляющее напряжение, при котором его затухание становится минимальным. Снимаемые с выхода выключателя 16 сигналы через ТТЛЗ 10 подводятся к УМ 11, усиливаются им, фильтруются ФНЧ 12 и подаются на вспомогательную антенну 13, облучающую зонд 3. Переизлученные им сигналы принимаются антенной 1 и через ППП 4 поступают на приемник ПРМ 5, усиливаются, преобразуются в соответствии с штатными алгоритмами и поступают на ВВ 8, который определяет дальность Дик, углы азимута αик и места βик и вычисляет погрешности их измерения как
ΔД=Др-Дик;
Δα=αр-αик;
Δβ=βр-βик
где Др, αр и βр - расчетные значения дальности, углов места и азимута, соответственно.
Эти ошибки могут быть учтены при штатной работе МБРЛС, также как и при контроле некогерентных РЛС.
Предлагаемое устройство встроенного контроля когерентных МБРЛС может быть выполнено на современной отечественной элементной базе и его внедрение повышает полноту контроля и не приведет к значительному увеличению объема и массы.
Практическая реализация предлагаемого способа не вызовет особых затруднений, связанных с размещением зонда.
Литература
1. Давыдов П.С. Техническая диагностика радиоэлектронных устройств и систем. - М.: Радио и связь, 1988, с.150-151.
2. Моноимпульсный радиолокатор. Патент RU (II) №2183329 (13) C1 кл. G 01 S 13/44, 7/40, Н 0103/00 по заявке 2000127072/09 от 23.10.2000.
3. Джексон и др. Определение диаграмм направленности антенн по результатам измерений в ближней зоне /ТИИЭР. - 1973, Т.61 - №12 - с.5-37.
4. Устройство для измерения фазы и амплитуды электромагнитного поля в ближней зоне исследуемой антенны. Авторское свидетельство №1670629 (СССР), кл. G 01 R 29/10 по заявке 4639586/00-29(22) от 19.01.89. Изобретения стран мира. Реферативный журнал. Выпуск 85, МКИ G 01 P, S №21 (1991), с.11.
5. Вершигоров Н.С. и Кузнецов Т.В. К вопросу о принципе сравнения в нелинейной радиолокации / Информост. Радиоэлектроника и телекоммуникации, 2002, №3 (21), с.7-14.
6. Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987 г., с.50-71.
7. GaAs HBT MMIC/DIVJDE-BY-2DC-13 GHz WWW.nitlite/com.
8. Гассанов Л.Г. и др. Твердотельные устройства СВЧ в технике связи. - М.: Радио и связь, 1988, с.215.
9. Гармаш С.В. и др. Применение пассивных интегральных схем на арсениде галлия в конструкциях микрополосковых модулей СВЧ. Тезисы докладов 2-й Всероссийской научно-технической конференции по проблемам создания перспективной авионики. - Томск, 15-17 апреля, 2003 г., с.102-103.
10. Моноимпульсная радиолокационная станция сопровождения цели. Патент РФ №2114444 (13) с.1 кл. 6 G 01 S 13/44, 27.06.98 по заявке 97112846/09 от 15.07.97.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ встроенного контроля бортовых радиолокационных станций | 2019 |
|
RU2707268C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| УСТРОЙСТВО НАВЕДЕНИЯ СНАРЯДА | 1996 |
|
RU2100746C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315333C2 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |

Предлагаемые изобретения относятся к радиолокационной технике, а именно к способам встроенного контроля моноимпульсных бортовых радиолокационных станций (МБРЛС) ракет, установленных на носителях. Сущность: в расчетной точке носителя ракеты или обтекателя антенны МБРЛС устанавливают зонд в виде полуволнового вибратора, плечи которого подключены к нелинейному элементу, подключают по команде «Контроль» передатчик МБРЛС, формирующий СВЧ колебания несущей частоты fc, к детектору мощности и оценивают его мощность, создают СВЧ колебания частоты fo, которая в n раз меньше частоты fc, задерживают их во времени относительно СВЧ сигналов передатчика частоты fc, облучают ими зонд, переизлучающий сигнал на частоте fc, принимают и обрабатывают эти сигналы штатными средствами МБРЛС, измеряют имитируемые дальность, углы α азимута и места β, сравнивают их с заданными и принимают решение о работоспособности МБРЛС, если мощность передатчика не ниже допустимой, а разности заданных и измеренных углов α и β не превосходят допустимые значения. Технический результат: повышение достоверности и скрытности встроенного контроля. 3 н.п. ф-лы, 3 ил.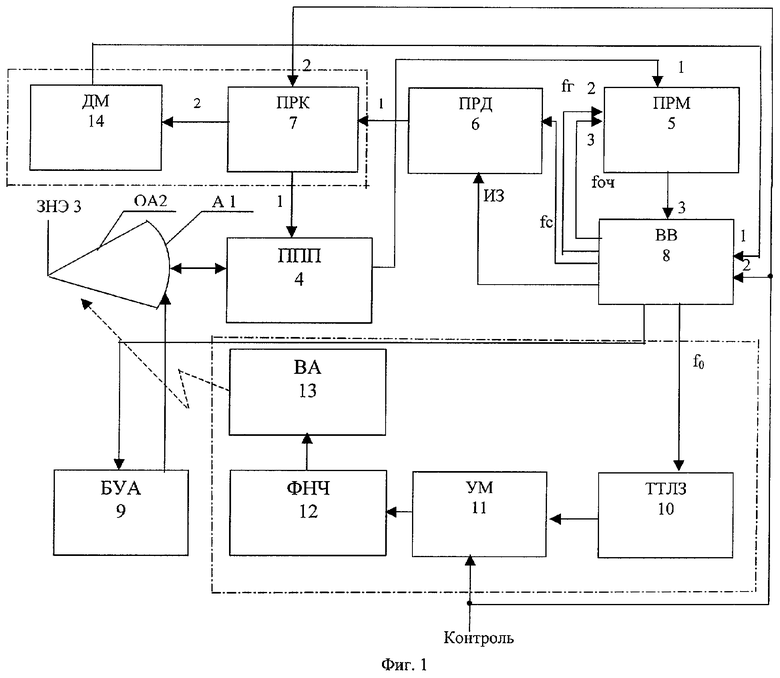
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| Устройство для измерения фазы и амплитуды электромагнитного поля в ближней зоне исследуемой антенны | 1989 |
|
SU1670629A1 |
| ИМИТАЦИОННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 0 |
|
SU190437A1 |
| Устройство контроля радиолокатора с синтезированной апертурой | 1990 |
|
SU1789944A1 |
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОРКИ ДЕТАЛЕЙ | 0 |
|
SU269184A1 |

