Изобретение относится к радиолокационным устройствам с импульсным зондирующим сигналом, предназначенным для беспилотных летательных аппаратов, преимущественно, к моноимпульсным устройствам с активной фазированной антенной решеткой и цифровым суммарно-разностным преобразованием сигналов.
Известна моноимпульсная радиолокационная система беспилотного летательного аппарата по патенту РФ №2309430 на изобретение, МПК G01S 13/44, публикация 27.10.2007 г. Система содержит последовательно соединенные генератор кодов, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно соединенные суммарно-разностный преобразователь, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, а также возбудитель, импульсный модулятор, привод антенны, блоки фазовых детекторов суммарного и разностного сигналов с амплитудными квантователями, цифровые согласованные фильтры комплексного сигнала, содержащего две квадратуры, блок вычисления модуля, блок обнаружения и вычисления координат, дискриминатор дальности, преобразователь кода во временной интервал, частотный дискриминатор, дискриминатор угла, генераторы доплеровских частот, фильтры доплеровских частот, блок захвата объекта сопровождения, сумматоры, вычитатель, вентили и регистры.
Благодаря применению фазоманипулированного сигнала и одновременной работе трех контуров сопровождения объекта: по дальности, по доплеровской частоте и по углу известная РЛС обеспечивает высокую разрешающую способность.
Кроме этого высокая надежность работы РЛС обеспечивается введением в систему устройства имитации отраженного сигнала по дальности, углу и частоте с помощью компенсаторов доплеровского сдвига частоты сигнала, что позволяет проводить комплексную проверку РЛС перед запуском ее в штатный режим.
Недостатками известного аналога радиолокационной станции являются:
- низкая способность адаптации к сложной электромагнитной обстановке ввиду узкой полосы рабочих частот, определяемой суммарно-разностным преобразователем;
- невысокая избирательность по зеркальному каналу ввиду малого значения промежуточной частоты;
- низкая скорость обзора сцены, связанная с механическим перемещением диаграммы направленности антенны.
Наиболее близким аналогом, принятым за прототип предлагаемого изобретения, является моноимпульсный пеленгатор с комбинированным антенным устройством по патенту РФ №2461929 на изобретение, МПК H01Q 19/00, публикация 20.09.2012 г. Антенное устройство прототипа содержит неподвижное зеркало в виде параболического цилиндра, подвижный плоский отражатель (твист-рефлектор), ось вращения которого расположена параллельно образующей неподвижного зеркала, и три линейные фазированные антенные решетки (ЛФАР), расположенные в фокусной плоскости параболического цилиндра параллельно его образующей. Центральная ЛФАР является приемопередающей, а две другие ЛФАР являются приемными. Угломестное сканирование обеспечивается перестройкой углового положения твист-рефлектора, азимутальное сканирование ДНА на передачу выполняется с помощью центральной ЛФАР, моноимпульсный прием сигнала в азимутальной плоскости обеспечивается обработкой сигнала, принятого каждой из ЛФАР, моноимпульсный прием в угломестной плоскости обеспечивается использованием разности сигналов, полученных двумя боковыми ЛФАР, в качестве суммарной ДНА при угломестном и азимутальном приеме используется суммарный сигнал, полученный от центральной ЛФАР на заданном направлении. Входы-выходы ЛФАР соединены с соответствующими антенными входами-выходами многоканального приемного устройства, сигнальные выходы которого соединены с соответствующими входами многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, выполненного на основе процессора.
Достоинством устройства по прототипу является высокая скорость сканирования диаграммы направленности антенны (ДНА) в азимутальной плоскости при умеренном числе элементов фазированной антенной решетки (ФАР), обеспечивающих сканирование ДНА в широком диапазоне углов.
Недостатком прототипа является то, что возможность электронного сканирования обеспечивается только в одной плоскости. Кроме этого аналоговая демодуляция принятых сигналов и выполнение их цифрового преобразования на видеочастоте не обеспечивают достаточной точности определения пеленга.
Техническим результатом предлагаемого изобретения является повышение быстродействия и точности определения пеленга в сложной помеховой обстановке.
Сущность изобретения заключается в том, что моноимпульсный пеленгатор с комбинированным антенным устройством, содержащий двухзеркальную антенну с возбуждением от активной фазированной антенной решетки, элементарные облучатели которой соединены с антенными входами-выходами многоканального приемопередающего устройства, сигнальные выходы которого подключены к соответствующим входам многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, дополнительно содержит возбудитель-синтезатор опорных колебаний и управляющую электронно-вычислительную машину (ЭВМ), при этом многоканальное приемопередающее устройство состоит из четырех приемопередающих модулей, каждый из которых содержит три коммутатора прием-передача, смеситель, усилитель мощности, вход которого через предварительный усилитель соединен с первым выходом первого коммутатора прием-передача, а выход подключен к первому входу второго коммутатора прием-передача, второй вход-выход которого образует антенный вход-выход приемопередающего модуля, а выход через последовательно включенные устройство защиты, малошумящий усилитель и усилитель высокой частоты соединен со вторым входом третьего коммутатора прием-передача, первый вход которого образует вход сигнала возбуждения на промежуточной частоте приемопередающего модуля, а выход соединен со вторым входом смесителя, выход которого соединен с входом первого коммутатора прием-передача, второй выход которого образует сигнальный выход приемопередающего модуля, кроме этого возбудитель-синтезатор опорных колебаний содержит опорный генератор, к выходу которого подключены формирователь частоты дискретизации, выход которого соединен с соответствующим входом многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, формирователь частоты гетеродина, к выходу которого подключены первые входы смесителей всех приемопередающих модулей, и формирователь промежуточной частоты, к выходу которого подключены первые входы четырех квадратурных амплитудных модуляторов, информационные входы которых и информационный вход формирователя частоты гетеродина соединены с первым выходом управляющей ЭВМ, выходы квадратурных амплитудных модуляторов соединены с первыми входами третьих коммутаторов прием-передача соответствующих приемопередающих модулей, при этом ко второму выходу управляющей ЭВМ подключен вход опорного сигнала многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, к третьему выходу управляющей ЭВМ подключены управляющие входы коммутаторов прием-передача приемопередающих модулей, а к четвертому - управляющий вход антенного устройства.
Сущность изобретения поясняется чертежами, на которых представлены:
фиг. 1 - структурная схема моноимпульсного пеленгатора,
фиг. 2 - структурная схема антенного устройства.
фиг. 3 - структурная схема многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов.
На структурной схеме моноимпульсного пеленгатора приняты следующие обозначения:
1 - многоканальное приемопередающее устройство,
2-1, …2-4 - приемопередающие модули,
3 - антенное устройство,
4 - многоканальное устройство цифрового преобразования и формирования суммарно-разностных сигналов;
5 - возбудитель-синтезатор опорных колебаний,
6 - управляющая электронно-вычислительная машина (ЭВМ),
7, 8, 9 - первый, второй и третий коммутаторы прием-передача,
10 - предварительный усилитель,
11 - усилитель мощности,
12 - смеситель,
13 - устройство защиты,
14 - малошумящий усилитель,
15 - усилитель высокой частоты,
16 - опорный генератор,
17 - формирователь частоты гетеродина,
18 - формирователь частоты дискретизации,
19 - формирователь промежуточной частоты,
20, …, 23 - квадратурные амплитудные модуляторы.
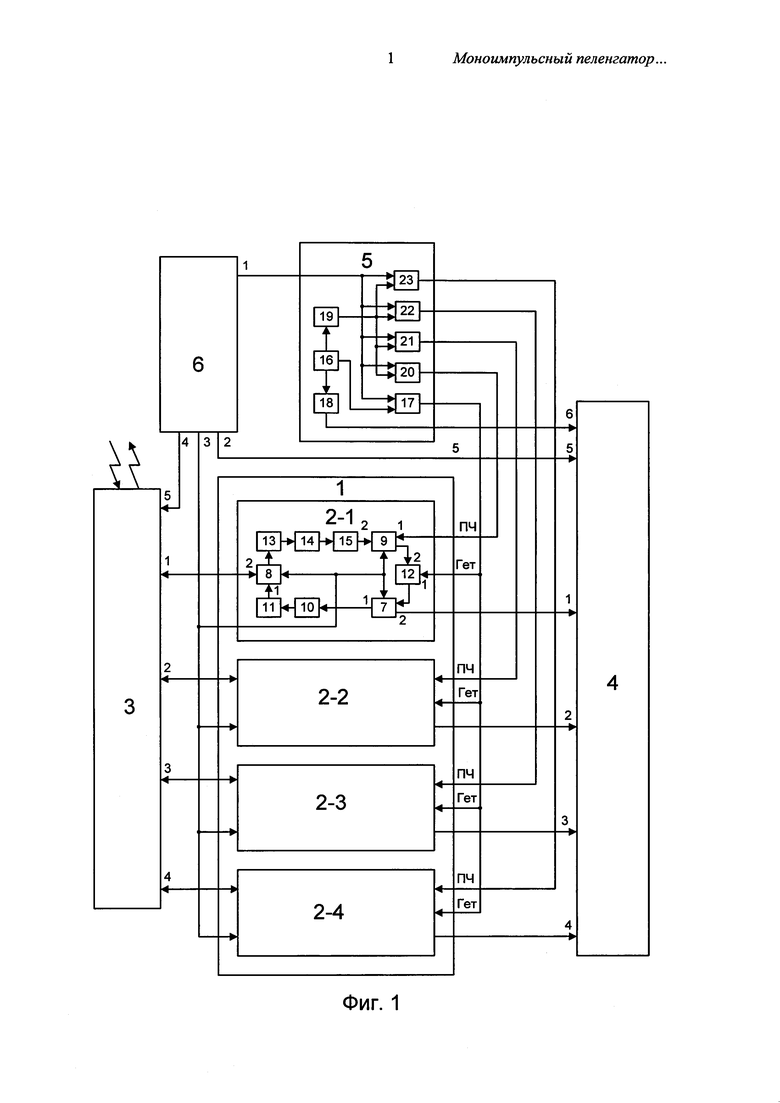
Согласно фиг. 1 моноимпульсный пеленгатор содержит многоканальное приемопередающее устройство 1, состоящее из четырех приемопередающих модулей 2-1, …, 2-4, антенные входы-выходы которых соединены с антенным устройством 3, а сигнальные выходы подключены к входам с первого по четвертый многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, пятый вход (опорного сигнала) которого соединен со вторым выходом управляющей ЭВМ 6, а шестой вход подключен к выходу формирователя 18 частоты дискретизации возбудителя-синтезатора 5 опорных колебаний.
Возбудитель-синтезатор 5 опорных колебаний содержит опорный генератор 16, к выходам которого подключены формирователь 18 частоты дискретизации, формирователь 17 частоты гетеродина и формирователь 19 промежуточной частоты, к выходу которого подключены первые входы квадратурных амплитудных модуляторов 20, …, 23. Вторые (информационные) входы квадратурных амплитудных модуляторов и второй (информационный) вход формирователя 17 частоты гетеродины соединены с первым выходом управляющей ЭВМ 6 посредством информационной магистрали, по которой передаются коды, задающие вид и параметры (амплитуда, фаза) модулирующего сигнала, а также значения частот гетеродина.
К выходу формирователя 17 частоты гетеродины подключены гетеродинные входы каждого из приемопередающих модулей 2-1, …, 2-4, которыми являются первые входы смесителей 12. К выходам квадратурных амплитудных модуляторов 20, …, 23 подключены входы сигналов возбуждения на промежуточной частоте соответствующих приемопередающих модулей, образованные первыми входами третьих коммутаторов 9 прием-передача. Выход третьего коммутатора 9 прием-передача соединен со вторым входом смесителя 12, выход которого подключен к входу первого коммутатора 7 прием-передача, второй выход которого образует сигнальный выход приемопередающего модуля.
Первый выход первого коммутатора 7 прием-передача через последовательно включенные предварительный усилитель 10 и усилитель мощности 11 соединен с первым входом второго коммутатора 8 прием-передача, второй вход-выход которого образует антенный вход-выход приемопередающего модуля. Выход второго коммутатора 8 прием-передача через последовательно включенные устройство защиты 13, малошумящий усилитель 14 и усилитель 15 высокой частоты соединен со вторым входом третьего коммутатора 9 прием-передача.
Управляющие входы коммутаторов 7, 8, 9 прием-передача соединены с третьим выходом управляющей ЭВМ 6, четвертый выход которой соединен с управляющим входом антенного устройства 3.
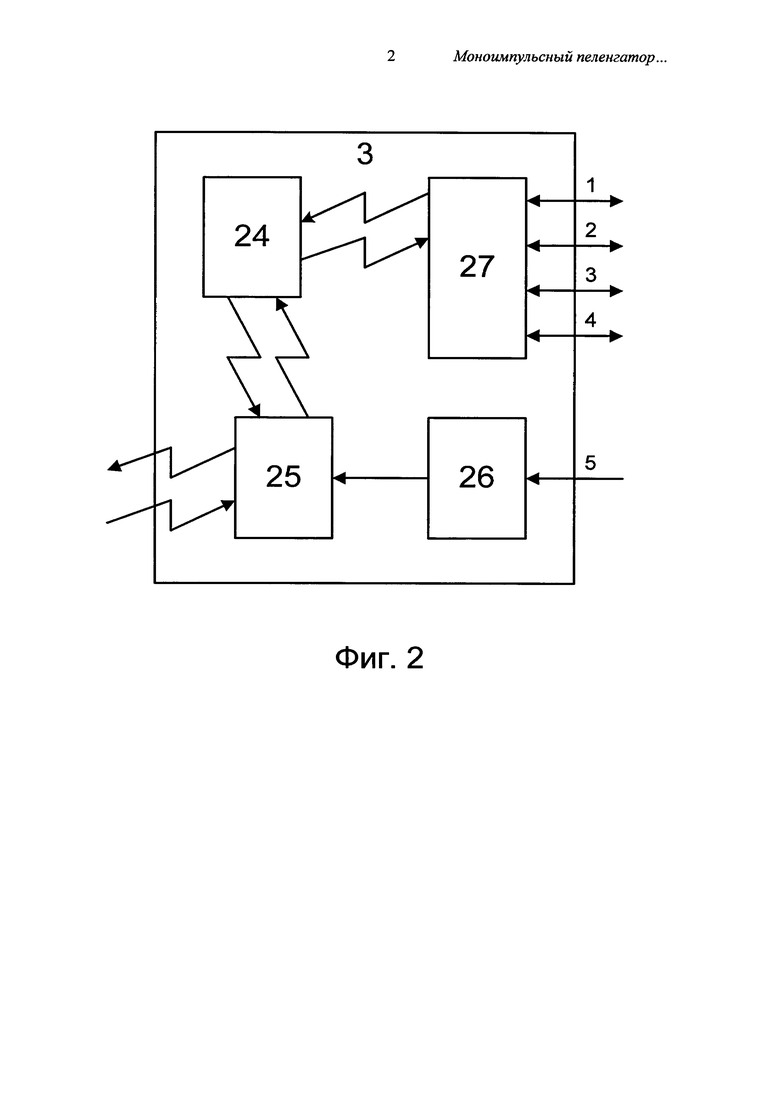
На фиг. 2 структурной схемы антенного устройства 3 приняты следующие обозначения:
24 - неподвижный отражатель,
25 - подвижный отражатель,
26 - контроллер привода,
27 - волноводный облучатель.
Антенное устройство 3 содержит волноводный облучатель 27, неподвижный отражатель 24 и подвижный отражатель 25, кинематически связанный с контроллером 26 привода, вход которого образует управляющий (пятый) вход антенного устройства 3. Для реализации моноимпульсного метода пеленгации в качестве волноводного облучателя 27 используется четырехканальный волноводный рупорный облучатель. При этом элементарные облучатели расположены по схеме квадрат, что позволяет одновременно получать моноимпульсные диаграммы направленности антенны в горизонтальной и вертикальной плоскостях, а также осуществлять электронное управление лучом антенной системы в горизонтальной и вертикальной плоскостях. Входы-выходы элементарных облучателей волноводного облучателя 27, образующих активную фазированную антенную решетку, соединены с антенными входами-выходами соответствующих приемопередающих модулей 2-1, …, 2-4.
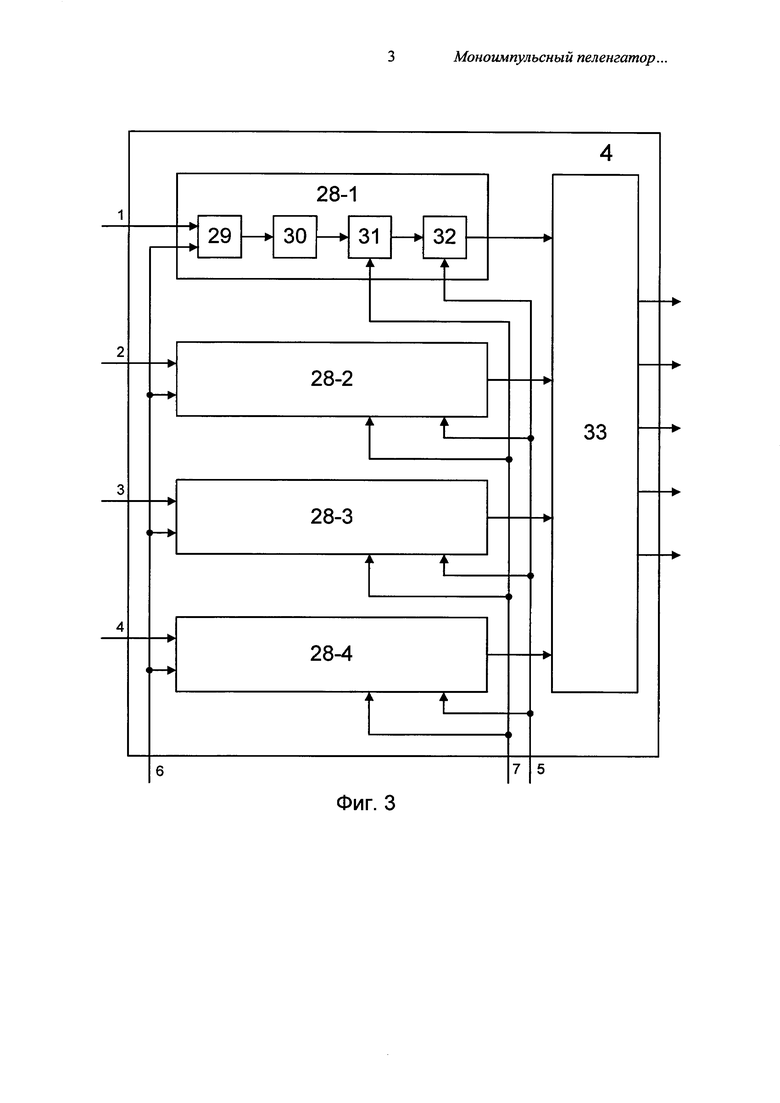
На фиг. 3 структурной схемы многоканального устройства 4 цифрового преобразования и формирования суммарно-разностных сигналов приняты следующие обозначения:
28-1, …, 28-4 - каналы цифрового преобразования сигналов,
29 - аналого-цифровой преобразователь,
30 - квадратурный амплитудный демодулятор,
31 - доплеровский корректор,
32 - согласованный фильтр,
33 - суммарно-разностный преобразователь.
Многоканальное устройство 4 цифрового преобразования и формирования суммарно-разностных сигналов содержит четыре канала 28-1, …, 28-4 цифрового преобразования сигналов, каждый из которых состоит из последовательно соединенных аналого-цифрового преобразователя 29, квадратурного амплитудного демодулятора 30, доплеровского корректора 31 и согласованного фильтра 32. Первые входы аналого-цифровых преобразователей 29 образуют сигнальные входы устройства 4, к шестому входу которого, по сигналу частоты дискретизации, подключены вторые входы аналого-цифровых преобразователей 29. К пятому входу (опорного сигнала) устройства 4, подключены опорные входы согласованных фильтров 32. К седьмому входу устройства 4, на который из системы управления движением беспилотного летательного аппарата поступает текущее значение его скорости, подключены информационные входы доплеровских корректоров 31.
Выходы согласованных фильтров 32 подключены к соответствующим входам суммарно-разностного преобразователя 33, который осуществляет линейную комбинацию входных сигналов. На выходах суммарно-разностного преобразователя 33 формируются: сигнал суммарного моноимпульсного канала (S1выx), сигнал разностного в вертикальной плоскости моноимпульсного канала (S2вых), сигнал разностного в горизонтальной плоскости моноимпульсного канала (S3вых).
Выходные сигналы суммарно-разностного преобразователя 33 передаются в устройство первичной обработки сигналов.
Управляющая ЭВМ 6 выполнена на основе микропроцессора с соответствующим программным обеспечением и интерфейсного контроллера, через который осуществляется связь с устройствами моноимпульсного пеленгатора.
Моноимпульсный пеленгатор работает следующим образом.
Последовательное переключение режимов работы пеленгатора с излучения радиолокационного сигнала на прием отраженного радиолокационного сигнала осуществляется управляющим сигналом с третьего выхода ЭВМ 6, который устанавливает в соответствующее положение коммутаторы 7, 8, 9 приемопередающих модулей 2-1, …, 2-4. Кроме этого на первом выходе управляющей ЭВМ формируются кодовые сигналы, задающие вид и параметры зондирующего сигнала (его частоту, амплитуду, сдвиги фаз между сигналами возбуждения, значение частоты гетеродина), поступающие на информационные входы квадратурных амплитудных модуляторов 20, …, 23, и формирователя 17 частоты гетеродина, а на четвертом выходе управляющей ЭВМ формируются кодовые сигналы, задающие пространственное положение подвижного отражателя 25 антенны, поступающие на вход контроллера 26 привода антенны.
Опорный генератор 16 возбудителя-синтезатора 5 опорных колебаний формирует сетку частот, задающих параметры работы формирователя 17 частоты гетеродина, формирователя 19 промежуточной частоты и формирователя 18 частоты дискретизации. Выходной сигнал формирователя 19 промежуточной частоты поступает в квадратурные амплитудные модуляторы 20, …, 23, на выходах которых формируются сигналы возбуждения на промежуточной частоте. При этом независимое управление модуляторами по сигналам из управляющей ЭВМ позволяет независимо в каждом канале устанавливать вид сигнала модуляции, его амплитуду и начальную фазу. На выходе формирователя 17 частоты гетеродина формируется сигнал гетеродинной частоты.
В режиме передачи первый коммутатор 7 прием-передача установлен в положение пропускания входного сигнала на первый выход, второй коммутатор 8 - в положение пропускания сигнала с первого входа на второй вход-выход, а третий коммутатор 9 - в положение пропускания сигнала с первого входа на выход.
Промодулированные сигналы возбуждения на промежуточной частоте с выходов квадратурных амплитудных модуляторов 20, …, 23 передаются каждый на вход соответствующего приемопередающего модуля 2-1, …, 2-4, в котором поступают на первые вход третьего коммутатора 9 прием-передача. Далее в смесителе 12, на первый вход которого подается сигнал из формирователя 17 частоты гетеродина, сигнал возбуждения переносится на несущую частоту, а затем после усиления усилителями 10, 11 через второй коммутатор 8 прием-передача поступает на соответствующий элемент волноводного облучателя 27 антенного устройства 3.
Диаграмма направленности (ДНА) антенны формируется гибридным способом. Механическое зеркало подвижного отражателя 25 формирует форму и основное направление главного лепестка ДНА, а независимо управляемые от ЭВМ квадратурные амплитудные модуляторы 20, …, 23 задают амплитудно-фазовое распределение волноводного облучателя 27. Управление амплитудно-фазовым распределением в апертуре облучателя (аналогично фазированным антенным решеткам) позволяет пространственно смещать направление главного лепестка ДНА относительно его основного направления и осуществлять электронное сканирование.
Возможность применения произвольных сигналов модуляции в независимо управляемых от ЭВМ квадратурных амплитудных модуляторах 20, …, 23 позволяет менять тип модулирующего сигнала и тип модуляции от импульса к импульсу (например фазовая манипуляция м-последовательностью и ЛЧМ), что затрудняет измерение параметров и определение типа радиолокационной станции и, следовательно, повышает помехозащищенность в условиях преднамеренных электромагнитных помех.
В режиме приема первый коммутатор 7 прием-передача установлен в положение пропускания входного сигнала на второй выход, второй коммутатор 8 - в положение пропускания сигнала со второго входа-выхода на выход, а третий коммутатор 9 - в положение пропускания сигнала со второго входа на выход.
Отраженный радиолокационный сигнал принимается в заданном направлении, определяемом положением подвижного отражателя 25 антенного устройства 3. Подвижный отражатель 25 переотражает электромагнитные волны на неподвижный отражатель 24, с которого они улавливаются волноводным облучателем 27. Выходные сигналы элементарных облучателей волноводного облучателя 27 поступают на входы соответствующих приемопередающих модулей 2-1, …, 2-4, в которых усиливаются усилителями 14,15 до требуемого уровня, переносятся на промежуточную частоту с помощью смесителей 12 и через первый коммутатор 7 прием-передача передаются на соответствующие входы многоканального устройства 4 цифрового преобразования и формирования суммарно-разностных сигналов.
В каждом из четырех каналов 28-1, …, 28-4 устройства 4 поступающий сигнал подвергается в АЦП 29 аналого-цифровому преобразованию с тактовой частотой дискретизации, задаваемой формирователем 18 частоты дискретизации. Далее дискретизированный по времени и квантованный по уровню сигнал поступает на вход квадратурного амплитудного демодулятора 30, с выхода которого демодулированный сигнал в комплексной форме поступает на вход доплеровского корректора 31. Доплеровский корректор 31 устраняет сдвиг по частоте спектра входного сигнала, вызванный эффектом Доплера вследствие движения беспилотного летательного аппарата. Затем сигнал подвергается согласованной фильтрации в согласованном фильтре 32, где подвергается операции свертки с опорным сигналом, поступающим из управляющей ЭВМ 6. Далее выходные сигналы (S1вх, S2вх, S3вх, S4вх) согласованных фильтров 32 поступают на соответствующие входы суммарно-разностного преобразователя 33.
Суммарно-разностный преобразователь 33 представляет собой вычислительное устройство, в котором реализуется вычисление следующих математических зависимостей в комплексном виде.



Таким образом, на выходе суммарно-разностного преобразователя 33 формируется сигнал суммарного моноимпульсного канала (S1вых), сигнал разностного в вертикальной плоскости моноимпульсного канала (S2вых), сигнал разностного в горизонтальной плоскости моноимпульсного канала (S3вых).
Далее сформированные на выходах суммарно-разностного преобразователя 33 сигналы передаются для последующей обработки в устройство первичной обработки пеленгатора.
Таким образом, предлагаемый моноимпульсный пеленгатор обеспечивает возможность произвольно менять параметры сигналов каждого из четырех каналов, в частности амплитуды и фазы, и позволяет осуществлять электронное сканирование ДН антенны, т.е. избежать задержек, вызванных инерционным перемещением зеркала антенны, и увеличить скорость обзора радиолокационной сцены.
Цифро-аналоговое преобразование полосового радиолокационного сигнала на ПЧ с последующей демодуляцией позволяет:
- сократить количество аналоговых цепей преобразования частоты, причем высокое значение ПЧ (10%-20% от значения частоты несущей) позволяет одновременно эффективно подавлять зеркальный канал;
- цифровая демодуляция позволяет исключить амплитудно-фазовую неидентичность квадратурных каналов, присущую аналоговым демодулятором, а следовательно, повысить вероятность обнаружения сигнала и увеличить точность определения пеленга на фоне шумов.
Формирование суммарно-разностной диаграммы после демодуляции позволяет работать в широкой полосе несущих частот, увеличивая скрытность работы и повышая эффективность радиолокационной системы в условиях воздействия преднамеренных помех.
Кроме этого формирование суммарно-разностной диаграммы в цифровом виде обеспечивает повышение точности пеленгования, т.к. позволяет легко осуществлять компенсацию фазовых набегов между сигналами суммарного и разностного каналов, неизбежно возникающих вследствие неидентичности электрических длин суммарного и разностного приемных трактов.
Дополнительным преимуществом распределенной (четырехканальной) схемы приема-усиления является возможность гибко осуществлять компоновку ее элементов, адаптируя под конкретный конструктив.
Пользуясь сведениями, представленными в материалах заявки, моноимпульсный пеленгатор можно изготовить по существующей, известной в радиопромышленности технологии и использовать для оснащения беспилотных летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ МОНОИМПУЛЬСНАЯ АНТЕННА КАССЕГРЕНА С ВОЗБУЖДЕНИЕМ ОТ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2461928C1 |
| РАДИОЛОКАЦИОННАЯ МОНОИМПУЛЬСНАЯ АМПЛИТУДНАЯ СУММАРНО-РАЗНОСТНАЯ СИСТЕМА | 2022 |
|
RU2793137C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
Изобретение относится к радиолокационным устройствам с импульсным зондирующим сигналом, преимущественно к моноимпульсным устройствам с активной фазированной антенной решеткой и цифровым суммарно-разностным преобразованием сигналов. Достигаемый технический результат - повышение быстродействия и точности определения пеленга. Указанный результат достигается за счет того, что моноимпульсный пеленгатор с комбинированным антенным устройством, содержит двухзеркальную антенну с возбуждением от активной фазированной антенной решетки, элементарные облучатели которой соединены с антенными входами-выходами многоканального приемопередающего устройства, сигнальные выходы которого подключены к соответствующим входам многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, содержит также возбудитель-синтезатор опорных колебаний и управляющую электронно-вычислительную машину (ЭВМ), при этом многоканальное приемопередающее устройство состоит из четырех приемопередающих модулей, каждый из которых содержит три коммутатора прием-передача, смеситель, усилитель мощности, вход которого через предварительный усилитель соединен с первым выходом первого коммутатора прием-передача, а выход подключен к первому входу второго коммутатора прием-передача, второй вход-выход которого образует антенный вход-выход приемопередающего модуля, а выход через последовательно включенные устройство защиты, малошумящий усилитель и усилитель высокой частоты соединен со вторым входом третьего коммутатора прием-передача, первый вход которого образует вход сигнала возбуждения на промежуточной частоте приемопередающего модуля, а выход соединен со вторым входом смесителя, выход которого соединен с входом первого коммутатора прием-передача, второй выход которого образует сигнальный выход приемопередающего модуля, кроме этого возбудитель-синтезатор опорных колебаний содержит опорный генератор, к выходу которого подключены формирователь частоты дискретизации, выход которого соединен с соответствующим входом многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, формирователь частоты гетеродина, к выходу которого подключены первые входы смесителей всех приемопередающих модулей, и формирователь промежуточной частоты, к выходу которого подключены первые входы четырех квадратурных амплитудных модуляторов, информационные входы которых и информационный вход формирователя частоты гетеродина соединены с первым выходом управляющей ЭВМ, выходы квадратурных амплитудных модуляторов соединены с первыми входами третьих коммутаторов прием-передача соответствующих приемопередающих модулей, при этом ко второму выходу управляющей ЭВМ подключен вход опорного сигнала многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, к третьему выходу управляющей ЭВМ подключены управляющие входы коммутаторов прием-передача приемопередающих модулей, а к четвертому - управляющий вход антенного устройства. 3 ил.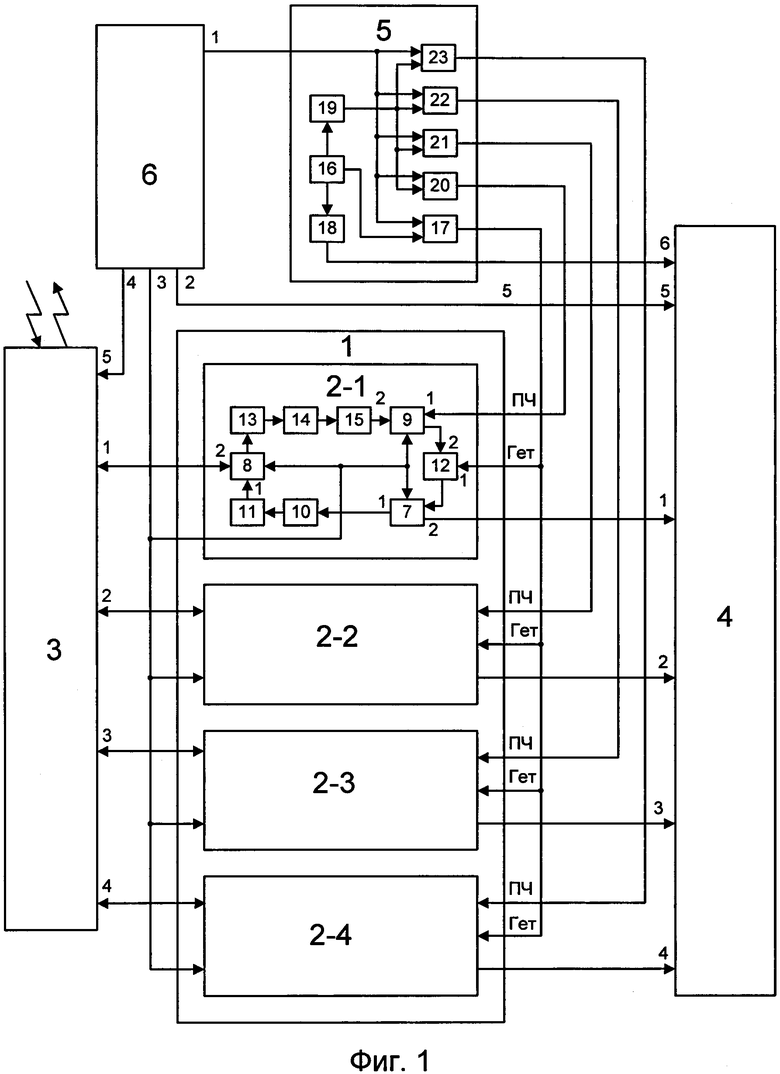
Моноимпульсный пеленгатор с комбинированным антенным устройством, содержащий двухзеркальную антенну с возбуждением от активной фазированной антенной решетки, элементарные облучатели которой соединены с антенными входами-выходами многоканального приемопередающего устройства, сигнальные выходы которого подключены к соответствующим входам многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, отличающийся тем, что дополнительно содержит возбудитель-синтезатор опорных колебаний и управляющую электронно-вычислительную машину (ЭВМ), многоканальное приемопередающее устройство состоит из четырех приемопередающих модулей, каждый из которых содержит три коммутатора прием-передача, смеситель, усилитель мощности, вход которого через предварительный усилитель соединен с первым выходом первого коммутатора прием-передача, а выход подключен к первому входу второго коммутатора прием-передача, второй вход-выход которого образует антенный вход-выход приемопередающего модуля, а выход через последовательно включенные устройство защиты, малошумящий усилитель и усилитель высокой частоты соединен со вторым входом третьего коммутатора прием-передача, первый вход которого образует вход сигнала возбуждения на промежуточной частоте приемопередающего модуля, а выход соединен со вторым входом смесителя, выход которого соединен с входом первого коммутатора прием-передача, второй выход которого образует сигнальный выход приемопередающего модуля, кроме этого возбудитель-синтезатор опорных колебаний содержит опорный генератор, к выходу которого подключены формирователь частоты дискретизации, выход которого соединен с соответствующим входом многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, формирователь частоты гетеродина, к выходу которого подключены первые входы смесителей всех приемопередающих модулей, и формирователь промежуточной частоты, к выходу которого подключены первые входы четырех квадратурных амплитудных модуляторов, информационные входы которых и информационный вход формирователя частоты гетеродина соединены с первым выходом управляющей ЭВМ, выходы квадратурных амплитудных модуляторов соединены с первыми входами третьих коммутаторов прием-передача соответствующих приемопередающих модулей, при этом ко второму выходу управляющей ЭВМ подключен вход опорного сигнала многоканального устройства цифрового преобразования и формирования суммарно-разностных сигналов, к третьему выходу управляющей ЭВМ подключены управляющие входы коммутаторов прием-передача приемопередающих модулей, а к четвертому - управляющий вход антенного устройства.
| СПОСОБ ОПТИМАЛЬНОГО РАЗМЕЩЕНИЯ И ОРИЕНТАЦИИ ПРИЕМНОГО/ПЕРЕДАЮЩЕГО ИЗЛУЧАТЕЛЯ В ВИДЕ КОАКСИАЛЬНО РАСПОЛОЖЕННЫХ ДИЭЛЕКТРИКОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ В ФОКАЛЬНОЙ ОБЛАСТИ ИСПОЛЬЗУЕМЫХ КОЛЛИМИРУЮЩИХ ПОВЕРХНОСТЕЙ | 2011 |
|
RU2461929C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2326397C1 |
| US 6087974 A, 11.07.2000 | |||
| JP 2010223985 A, 07.10.2010 | |||
| EP 1012623 A1, 28.06.2000 | |||
| US 8269665 B1, 18.09.2012. | |||

