Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано при регулировках крутизны пеленгационной характеристики угловой следящей системы в моноимпульсных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР), содержащей взаимные фазовращатели.
В моноимпульсных РЛС, осуществляющих автоматическое сопровождение объектов по угловым координатам, важным условием нормального функционирования угловых следящих систем является правильная установка крутизны их пеленгационных характеристик (ПХ) для обеспечения минимизации угловых ошибок сопровождения и предотвращения самовозбуждения следящих систем. На практике крутизна ПХ требует периодической проверки и, как правило, регулировки из-за недостаточной временной стабильности амплитудных и фазовых характеристик трактов РЛС, определяющих крутизну ПХ. Так, например, в фазовых суммарно-разностных угломерных устройствах изменения фазовых сдвигов суммарного и разностного сигналов приводят к изменению крутизны ПХ [1].
Для проведения проверки и регулировки крутизны ПХ необходим источник контрольного сигнала, который должен обеспечить возможность сквозного (полного) контроля ПХ следящей системы с охватом при этом ПХ антенны. В качестве контрольных сигналов можно было бы использовать сигналы внешнего источника, удаленного от раскрыва антенны на определенное расстояние, на котором формируются реальные диаграммы направленности антенны. Однако организация выносного источника контрольных сигналов не всегда легко и просто выполнима для мобильных и особенно корабельных радиолокаторов. Кроме того, включение в состав РЛС выносного источника контрольных сигналов сопряжено с дополнительными экономическими и временными затратами.
При исследовании уровня техники заявитель не обнаружил решений, относящихся к способам регулировки ПХ и настройки угловых следящих систем моноимпульсных РЛС с ФАР.
Задачей настоящего изобретения является разработка способа настройки угловой следящей системы, позволяющего оперативно производить регулировку крутизны ПХ с использованием в качестве контрольных сигналов "внутренних" сигналов, образующихся в ФАР при ее облучении сигналами штатного передатчика РЛС или отдельного генератора.
Указанный технический результат достигается тем, что в заявленном способе настройки угловой следящей системы моноимпульсной РЛС с ФАР, содержащей взаимные фазовращатели, облучают ФАР зондирующим сигналом на рабочей частоте РЛС в режиме передачи, принимают и используют в качестве контрольных сигналы, образующиеся путем отражения части излучаемой СВЧ-энергии от выходного раскрыва ФАР, по этим сигналам контролируют точность исходного положения луча ФАР в равносигнальном направлении и в случае необходимости с помощью системы управления лучом ФАР устанавливают луч в этом направлении, после чего вводят калиброванное рассогласование по угловой координате относительно исходного равносигнального направления луча путем отклонения его на заданный угол в пределах линейного участка пеленгационной характеристики угловой следящей системы РЛС, измеряют напряжение сигнала ошибки и, изменяя фазу разностного сигнала относительно суммарного сигнала, добиваются максимального значения напряжения сигнала ошибки, а изменяя уровень разностного сигнала, устанавливают его требуемую величину, соответствующую введенному калиброванному рассогласованию по угловой координате.
Облучение ФАР осуществляют с помощью штатного передатчика РЛС или отдельного генератора на частоте, соответствующей рабочей частоте передатчика РЛС.
Мощность передатчика РЛС устанавливают на уровне, обеспечивающем работу приемных каналов РЛС в линейной зоне.
Перед проведением настройки снимают бланкирующие импульсы приемника РЛС на нулевой дальности или переводят передатчик РЛС в режим непрерывной генерации.
Оперативность настройки и расширение функциональных возможностей по заявленному способу обусловлены полезным использованием вредного (нежелательного) по своей природе явления проникновения зондирующих сигналов передатчика на входы приемного устройства, имеющего место в моноимпульсных РЛС с общей приемопередающей ФАР. При облучении ФАР сигналами передатчика РЛС на входы ее приемных каналов проникают сигналы, прошедшие в прямом направлении через фазовращатели антенных элементов ФАР, отразившиеся от излучателей этих элементов вследствие неидеального согласования их с пространством и повторно прошедшие в обратном направлении через те же фазовращатели. Добиться идеального согласования излучателей антенных элементов ФАР с пространством, когда излучается вся подведенная СВЧ-энергия, практически не удается, поэтому и существуют условия для присутствия отраженных сигналов на входе приемного устройства при работающем на антенну передатчике. Недостаточно согласованные излучатели выходного раскрыва ФАР играют роль отражающей поверхности или как бы роль искусственного внешнего источника контрольных сигналов на нулевой дальности до РЛС. Принятые облучателем ФАР отраженные таким образом сигналы в суммарном и разностных каналах "описывают" так называемые "диаграммы развязок" приемопередающей ФАР, которые в области основных лепестков подобны реальным диаграммам направленности антенны, т.е. реализуют пеленгационную характеристику антенны [2]. При этом относительные фазовые соотношения разностного и суммарного сигналов, полученных через посредство "диаграмм развязок" и через реальные диаграммы направленности антенны, совпадают. Это свойство ФАР и является физической предпосылкой заявленного способа настройки угловых следящих систем.
Изобретение поясняется чертежом, на котором изображена упрощенная структурная схема типовой угловой следящей системы (для одной плоскости, например, азимутальной) моноимпульсной РЛС с ФАР.
Система содержит [см. , например, 3] передатчик РЛС 1, выход которого подключен к передающей части облучателя 2, ФАР 3, подключенные к приемной части облучателя 2 суммарный канал 4 и разностный канал 5 приемника РЛС. Выход суммарного канала 4 соединен с первым входом фазового детектора (ФД) 8, а выход разностного канала 5 соединен с его вторым входом через фазовращатель 7. К выходу ФД 8 подключена система 9 управления лучом ФАР, выход которой связан с фазовращателями ФАР 3. На схеме выделен в самостоятельный элемент орган 6 регулировки усиления разностного канала 5.
Настройку угловой следящей системы производят следующим образом. При нулевых командах отклонения луча, задаваемых системой 9 управления лучом ФАР, зондирующие сигналы от передатчика 1 подводят к облучателю 2, через который эти сигналы попадают на внутренние излучатели антенных элементов ФАР 3. Зондирующие сигналы, отраженные от внешних по отношению к облучателю 2 излучателей антенных элементов ФАР 3, т.е. прошедшие через одни и те же фазовращатели антенных элементов ФАР 3 в прямом и обратном направлениях, попадают в приемную часть облучателя 2, и их используют в качестве контрольных при регулировке крутизны ПХ. По этим сигналам проверяют точность исходного положения луча ФАР в равносигнальном направлении, т.е. наличие "точного пеленга", для чего измеряют напряжение сигнала ошибки Uco на выходе ФД 8, которое должно быть близким к нулю. При необходимости положение луча корректируют, задавая с помощью системы 9 управления лучом ФАР отличные от нуля команды, для установки "точного пеленга" (Uco=0). Вводят калиброванное рассогласование ("распеленговку") по угловой координате путем отклонения луча на заданный угол относительно исходно установленного равносигнального направления "точного пеленга" в пределах линейного участка ПХ, измеряют напряжение сигнала ошибки Uco на выходе ФД 8 и, изменяя фазу разностного сигнала по отношению к суммарному сигналу с помощью фазовращателя 7, устанавливают его максимальное значение, что соответствует максимуму крутизны ПХ. После этого, изменяя уровень разностного сигнала с помощью органа 6 регулировки усиления разностного канала 5, устанавливают требуемое значение напряжения сигнала ошибки Uco, соответствующее введенному калиброванному рассогласованию ("распеленговке") по угловой координате. (Оптимальное значение Uco, соответствующее задаваемому калиброванному рассогласованию по угловой координате при настройке по предлагаемому способу угловой следящей системы каждой конкретной РЛС, должно определяться заранее и указываться в руководстве по эксплуатации данной РЛС).
Перед настройкой угловых следящих систем по предлагаемому способу при необходимости проводят некоторые подготовительные операции, обеспечивающие беспрепятственное прохождение контрольных сигналов через приемные каналы РЛС. Для каждой конкретной РЛС эти подготовительные операции определяются построением их приемных и передающих устройств и могут быть, например, такими как:
- снятие бланкирующих импульсов приемника РЛС на нулевой дальности;
- перевод передатчика РЛС в режим непрерывной генерации;
- снижение мощности передатчика РЛС до уровня, обеспечивающего работу приемных каналов в линейной зоне (без ограничения принятого сигнала).
Как правило, возможности проведения таких операций, которые выполняются по известным правилам, в существующих РЛС имеются.
Облучение ФАР 3 для создания контрольных сигналов может осуществляться как с помощью штатного передатчика 1 РЛС, так (при необходимости) и с помощью отдельного генератора 10, подключаемого к штатному облучателю 2 вместо передатчика. При этом частота сигнала отдельного генератора 10 должна соответствовать рабочей частоте РЛС.
Использование изобретения позволяет упростить и ускорить процесс регулировки крутизны пеленгационных характеристик, обеспечивает сквозную, включая антенну РЛС, настройку угловых следящих систем моноимпульсных РЛС с ФАР, в том числе мобильных, для которых организация выносного источника контрольного сигнала затруднена.
Источники информации
1. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук А.А. Куликовского. - М.: Энергия, 1970. Том 3, с. 413.
2. Методы измерения характеристик антенн СВЧ / Л.Н. Захарьев, А-А. Леманский, В.И. Турчин и др.; Под ред. Н.М. Цейтлина. - М.: Радио и связь, 1985, с.333-334, рис. 15.1.
3. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М., Советское радио, 1970, с. 20, рис. 1.8.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНО-ПЕРЕДАЮЩИЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2002 |
|
RU2206155C1 |
| ПРИЕМНЫЙ МОНОИМПУЛЬСНЫЙ ОБЛУЧАТЕЛЬ | 2005 |
|
RU2289872C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| АНТЕННАЯ СИСТЕМА ПРОХОДНОГО ТИПА (ВАРИАНТЫ) | 2003 |
|
RU2245595C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| Способ высокоточного определения высоты полета низколетящей цели моноимпульсной РЛС сопровождения | 2021 |
|
RU2779039C1 |
| Моноимпульсная радиолокационная станция с автоматической калибровкой | 2016 |
|
RU2632477C1 |
| УГЛОВОЙ СЕЛЕКТОР ДЛЯ РЛС С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 1997 |
|
RU2160906C2 |
| Способ определения высоты полёта низколетящей цели моноимпульсной РЛС сопровождения в реальном масштабе времени | 2023 |
|
RU2816168C1 |
| УГЛОВОЙ СЕЛЕКТОР ДЛЯ ОБЗОРНОГО МОНОИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2000 |
|
RU2192654C2 |
Изобретение относится к угловым следящим системам с фазированными антенными решетками (ФАР). Способ настройки угловой следящей системы моноимпульсной РЛС с ФАР, содержащей взаимные фазовращатели, заключается в том, что облучают ФАР зондирующим сигналом на рабочей частоте РЛС в режиме передачи, принимают в качестве контрольных сигналы, отразившиеся от внешнего раскрыва ФАР и прошедшие таким образом через фазовращатели антенных элементов ФАР в прямом и обратном направлениях. По этим сигналам проверяют точность исходного положения луча ФАР в равносигнальном направлении и в случае необходимости устанавливают луч ФАР в этом направлении, после чего вводят калиброванное рассогласование по угловой координате относительно исходного положения луча, измеряют напряжение сигнала ошибки и устанавливают его требуемую величину, пропорциональную введенному калиброванному рассогласованию по угловой координате. Достигаемым техническим результатом является упрощение и ускорение процесса настройки угловых следящих систем моноимпульсных РЛС с ФАР. 5 з.п. ф-лы, 1 ил.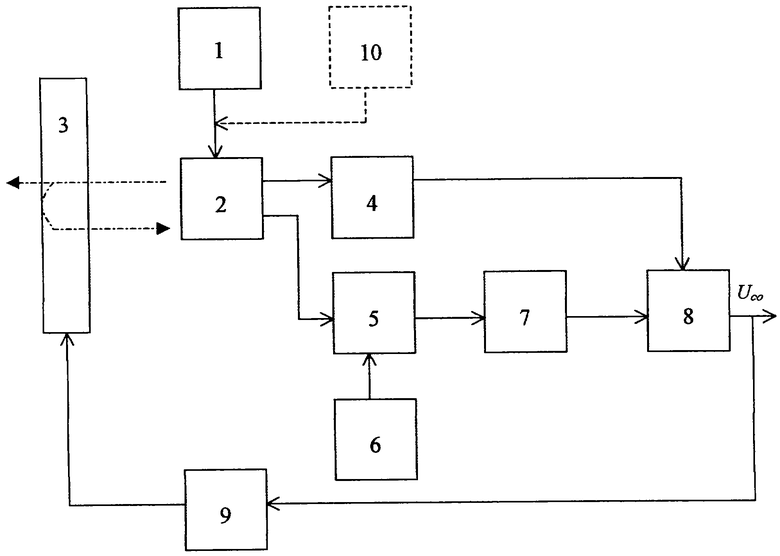
| А.И | |||
| ЛЕОНОВ, К.И | |||
| ФОМИЧЕВ | |||
| Моноимпульсная радиолокация | |||
| - М.: Советское радио, 1970, с.20, рис.1.8 | |||
| RU 94032128 А1, 20.07.1996 | |||
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАТОРА И РАДИОЛОКАТОР | 1996 |
|
RU2103706C1 |
| US 5051752, 24.09.1991 | |||
| US 5008844, 16.04.1991 | |||
| US 6133868 А, 17.10.2000. | |||

