Изобретение относится к радиотехнике и может быть использовано при демодуляции сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции (КАМ-16).
Известен демодулятор сигналов квадратурной амплитудной манипуляции, содержащий два фазовых детектора, два фильтра нижних частот, два перемножителя, управляемый генератор и сумматор. Выходы перемножителей соединены со входами сумматора. Выход управляемого генератора соединен со вторым входом первого фазового детектора, первый вход которого является входом устройства (см. а.с 1758899, МКИ 5 Н 04 L 27/38, опубл. в БИ 32, 30.08.92 - [1]).
Известное устройство имеет четыре выхода, по каждому из которых потребителю поступают информационные цифровые потоки (называемые также подканалами или парциальными каналами).
Недостатком известного демодулятора является невозможность оценки в нем вероятности ошибки по каждому из четырех парциальных цифровых каналов передачи информации, поскольку в известном демодуляторе отсутствуют необходимые для этого технические средства.
Известен также демодулятор сигналов шестнадцатипозиционной квадратурной амплитудой манипуляции, содержащий два фазовых детектора (ФД), два блока регенерации (решающих устройства), два модулятора, два вычитателя, сумматор, фильтр и генератор, управляемый напряжением (ГУН). Первый вход первого ФД является входом устройства, а второй вход соединен с выходом ГУН, вход которого соединен с выходом фильтра, вход которого соединен с выходом сумматора. Выходы первого ФД соединены со входами первого блока регенерации, выходы которого соединены со входами первого модулятора. Выходы второго ФД соединены со входами второго блока регенерации, выходы которого соединены со входами второго модулятора. Второй вход второго ФД соединен с выходом ГУН (см. патент RU 2019055, МКИ 5 Н 04 L 27/34, опубл. в БИ 16, 30.08.94 - [2]).
Недостатком известного демодулятора является невозможность оценки в нем вероятности ошибки по каждому из четырех парциальных цифровых каналов передачи информации, поскольку в известном демодуляторе отсутствуют необходимые для этого технические средства.
Из известных технических решений наиболее близким по технической сущности к заявляемому устройству (прототипом) является демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий первый и второй фазовые детекторы, первое решающее устройство, первый и второй вычитатели, первый четырехпозиционный модулятор, первый и второй перемножители, первый и второй ограничители, фильтр и генератор, управляемый напряжением, причем первый вход первого фазового детектора подключен к входу устройства и к первому входу первого вычитателя, второй вход которого соединен с выходом первого четырехпозиционного модулятора, первый вход которого соединен с выходом генератора, управляемого напряжением, а второй и третий входы соответственно с первым и вторым выходами первого решающего устройства, первый и второй входы которого соединены соответственно с первым и вторым выходами первого фазового детектора, второй вход которого соединен со вторым входом второго фазового детектора и выходом генератора, управляемого напряжением, вход которого соединен с выходом фильтра. Вход фильтра соединен с выходом второго вычитателя, первый и второй входы которого соединены соответственно с выходами первого и второго перемножителей, первые входы которых соединены соответственно с выходами первого и второго ограничителей, вход первого ограничителя соединен со вторым входом второго перемножителя и вторым выходом второго фазового детектора. Вход второго ограничителя соединен со вторым входом первого перемножителя и первым выходом второго фазового детектора, первый вход которого соединен с выходом первого вычитателя, первый, второй, третий и четвертый выходы первого решающего устройства являются соответственно первым, вторым, третьим и четвертым выходами устройства (см. патент RU 2013018, МПК 5 Н 04 L 27/22, опубл. в БИ 9, 15.05.94 - [3]).
Как и описанные выше устройства, прототип имеет четыре выхода, по которым потребитель получает четыре парциальных канала информации.
Недостатком устройства-прототипа является невозможность оценки в нем вероятности ошибки по каждому из четырех парциальных каналов передачи информации.
В системах передачи дискретных сообщений вероятность ошибки в каждом из парциальных каналов является важнейшей величиной, определяющей как пропускную способность канала с шумом, так и качество принимаемых сообщений (см. Радиотехнические системы передачи информации / Под ред В.В. Калмыкова. М. : Радио и связь, 1990, с.62-63 - [4]). В связи с этим задача измерения вероятности ошибки в парциальных каналах является актуальной.
Тривиальным путем измерения вероятности ошибки является оценка количества искаженных символов в некоторой известной синхрокомбинации (сосредоточенной или распределенной).
С одной стороны, соответствующие устройства (типа цикловых или кадровых синхронизаторов) гораздо сложнее самого демодулятора. С другой стороны, в ряде случаев заранее оговоренная синхрокомбинация в сигнале может отсутствовать (например, если сигнал КАМ-16 при передаче уплотняется другими сигналами). Таким образом, актуальной является задача измерения вероятности ошибки именно в самом демодуляторе и именно по любому (в том числе, не содержащему известных синхропоследовательностей) трафиковому сигналу. Термин "трафиковый сигнал" означает полезный информационный сигнал (в противоположность специальным технологическим тестовым сигналам).
Технический результат-оценивание в демодуляторе вероятности ошибки в каждом из четырех парциальных цифровых каналов передачи информации непосредственно по графиковому сигналу достигается выполнением следующих операций над сигналом:
1. Когерентно демодулируют входной сигнал КАМ-16 и получают на выходе демодулятора тетраду демодулированных символов {A; B; C; D}.
2. При помощи сигнала восстановленной несущей частоты и двух цифровых символов {C; D} из тетрады демодулированных символов {A; B; C; D} формируют на выходе первого четырехпозиционного модулятора сигнал четырехпозиционной фазовой модуляции (ФМ-4).
3. Вычитают из входного сигнала КАМ-16 сформированный сигнал ФМ-4 и полученный в результате вычитания сигнал обрабатывают в схеме Костаса для выработки управляющего напряжения для генератора, управляемого напряжением (ГУН), на выходе которого получают сигнал восстановленный несущей частоты.
4. При помощи сигнала восстановленной несущей частоты и двух цифровых символов {А; В} из тетрады демодулированных символов {A; B; C; D} формируют на выходе второго четырехпозиционного модулятора второй сигнал ФМ-4.
5. Вычитают второй сигнал ФМ-4 из сигнала разности входного сигнала КАМ-16 и первого сигнала ФМ-4. Таким образом, в результате выполнения этой процедуры над сигналами, получают сигнал шумовой компоненты, присутствовавший во входном сигнале. Данный сигнал (шум) по принципиальным ограничениям невозможно использовать для уменьшения вероятности ошибки на выходе демодулятора, зато его можно использовать для оценивания этой вероятности ошибки.
6. Усиливают в К раз полученный шумовой сигнал и суммируют его с входным сигналом КАМ-16.
7. Когерентно демодулируют сигнал КАМ-16, смешанный с усиленным в К раз шумовым сигналом, после чего получают на выходе второго решающего устройства тетраду демодулированных символов {Ак; Вк; Ск; Dк}.
8. Сравнивают между собой значения символов А и Ак; В и Вк; С и Ск; D и Dк и формируют поток импульсов несовпадений указанных пар символов.
9. Измеряя частоту импульсного потока несовпадений для каждого из четырех парциальных каналов, получают оценку вероятности ошибки в цифровых символах {A,B,C,D} на выходе демодулятора.
Таким образом, для оценивания вероятности ошибки на выходе демодулятора, используется дополнительный фазовый детектор, в котором когерентно демодулируется входной сигнал КАМ-16, дополнительно зашумленный сигналом входной шумовой компоненты с нормированным уровнем К.
Технический результат достигается тем, что демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции содержит первый и второй фазовые детекторы, первое решающее устройство, первый и второй вычитатели, первый четырехпозиционный модулятор, первый и второй перемножители, первый и второй ограничители, фильтр и генератор, управляемый напряжением, причем первый вход первого фазового детектора подключен к входу устройства и к первому входу первого вычитателя, второй вход которого соединен с выходом первого четырехпозиционного модулятора, первый вход которого соединен с выходом генератора, управляемого напряжением, а второй и третий входы - соответственно с первым и вторым выходами первого решающего устройства, первый и второй входы которого соединены соответственно с первым и вторым выходами первого фазового детектора, второй вход которого соединен со вторым входом второго фазового детектора и выходом генератора, управляемого напряжением, вход которого соединен с выходом фильтра. Вход фильтра соединен с выходом второго вычитателя, первый и второй входы которого соединены соответственно с выходами первого и второго перемножителей, первые входы которых соединены соответственно с выходами первого и второго ограничителей, вход первого ограничителя соединен со вторым входом второго перемножителя и вторым выходом второго фазового детектора. Вход второго ограничителя соединен со вторым входом первого перемножителя и первым выходом второго фазового детектора, первый вход которого соединен с выходом первого вычитателя, первый, второй, третий и четвертый выходы первого решающего устройства являются соответственно первым, вторым, третьим и четвертым выходами устройства.
Согласно изобретению он содержит дополнительно третий вычитатель, усилитель, сумматор, третий фазовый детектор, второе решающее устройство, второй четырехпозиционный модулятор, первый, второй, третий и четвертый элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, причем первый и второй входы третьего вычитателя соединены соответственно с выходами первого вычитателя и второго четырехпозиционного модулятора, первый, второй и третий входы которого соединены соответственно с выходом генератора, управляемого напряжением, третьим и четвертым выходами первого решающего устройства, первый, второй, третий и четвертый выходы которого соединены соответственно с первыми входами первого, второго, третьего и четвертого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, выходы которых являются соответственно пятым, шестым, седьмым и восьмым выходами устройства, а вторые входы соединены соответственно с первым, вторым, третьим и четвертым выходами второго решающего устройства, первый и второй входы которого соединены соответственно с первым и вторым выходами третьего фазового детектора, второй вход которого соединен с выходом генератора, управляемого напряжением, а первый вход с выходом сумматора, первый вход которого соединен с первым входом первого вычитателя, а второй вход с выходом усилителя, вход которого соединен с выходом третьего вычитателя.
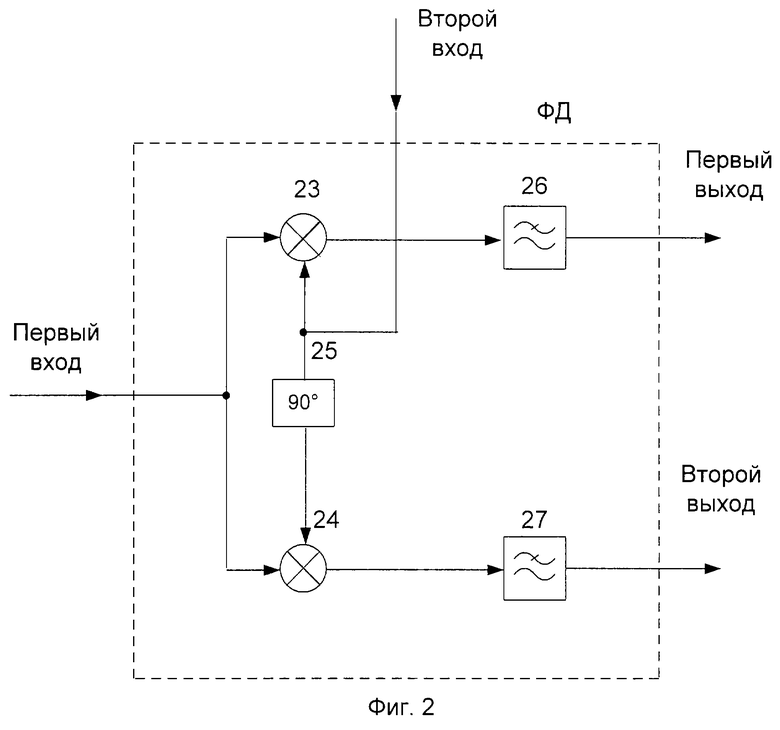
Другим отличием является то, что фазовый детектор содержит первый и второй перемножители, первый и второй фильтры нижних частот (ФНЧ) и фазовращатель на 90o. Первые входы обоих перемножителей соединены с первым входом ФД, второй вход которого соединен со вторым входом первого перемножителя и входом фазовращателя на 90o, выход которого соединен со вторым входом второго перемножителя, выходы первого и второго перемножителей соединены со входами соответственно первого и второго ФНЧ, которые являются первым и вторым выходами ФД.
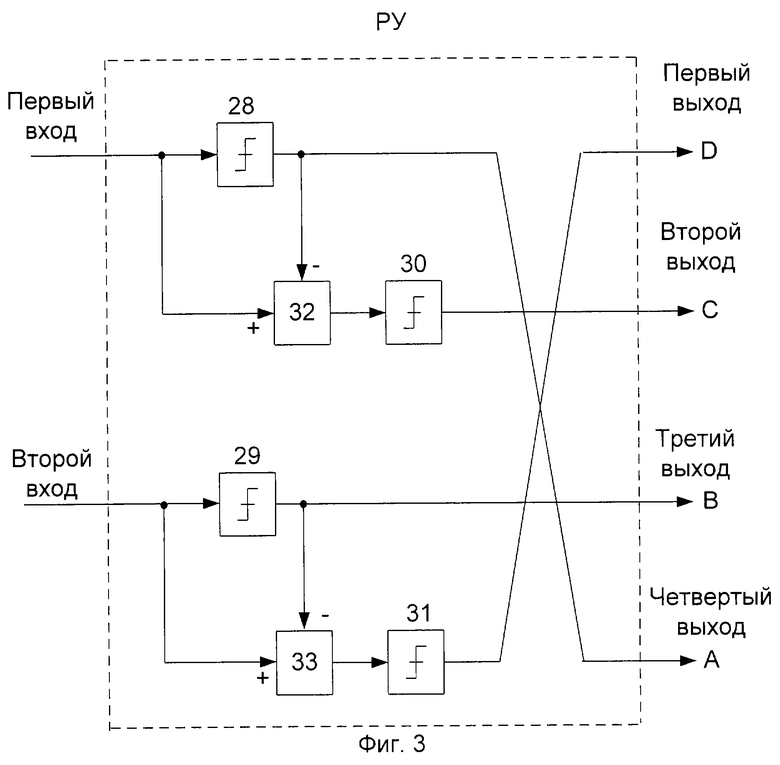
Другим отличием является то, что решающее устройство (РУ) содержит первый, второй, третий и четвертый ограничители и первый и второй вычитатели. Первый вход РУ соединен со входом первого ограничителя и первым входом первого вычитателя, выход которого соединен со входом третьего ограничителя, выход которого является вторым выходом РУ. Выход первого ограничителя соединен со вторым входом первого вычитателя и является четвертым выходом РУ. Второй вход РУ соединен со входом второго ограничителя и первым входом второго вычитателя, выход которого соединен со входом четвертого ограничителя, выход которого является первым выходом РУ. Выход второго ограничителя соединен со вторым входом второго вычитателя и является третьим выходом РУ.
На фиг.1 приведена функциональная схема демодулятора сигналов КАМ-16.
На фиг.2 приведена функциональная схема фазового детектора.
На фиг.3 приведена функциональная схема решающего устройства.
На функциональной схеме демодулятора не приведены цепи, не являющиеся существенными в данном случае: цепи питания и тактовой синхронизации.
Демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции (фиг. 1) содержит первый фазовый детектор (ФД) 1, второй ФД 2 и третий ФД 3, первое решающее устройство (РУ) 4 и второе РУ 5, первый четырехпозиционный модулятор (ЧПМ) 6 и второй ЧПМ 7, первый, второй и третий вычитатели 8, 9 и 10, сумматор 11, усилитель 12, первый и второй перемножители 13 и 14, первый и второй ограничители 15 и 16, фильтр 17, генератор, управляемый напряжением (ГУН) 18, первый, второй, третий и четвертый элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 19, 20, 21 и 22.
Коэффициенты передачи первого вычитателя 8 по первому входу +1, по второму -1/2; коэффициенты передачи второго вычитателя 9 по первому входу -1, по второму +1; коэффициенты передачи третьего вычитателя 10 по первому входу +1, по второму входу -1.
Каждый фазовый детектор 1, 2 и 3 (фиг.2) содержит первый и второй перемножители 23 и 24, первый и второй фильтры нижних частот (ФНЧ) 26 и 27 и фазовращатель на 90o 25. Первые входы обоих перемножителей 23 и 24 соединены с первым входом ФД 1, 2 и 3, второй вход которого соединен со вторым входом первого перемножителя 23 и входом фазовращателя на 90o 25, выход которого соединен со вторым входом второго перемножителя 24, выходы первого и второго перемножителей 23 и 24 соединены со входами соответственно первого и второго ФНЧ 26 и 27, которые являются первым и вторым выходами ФД 1, 2 и 3.
Каждое решающее устройство (РУ) 4 и 5 содержит первый, второй, третий и четвертый ограничители 28, 29, 30 и 31 и первый и второй вычитатели 32 и 33. Первый вход РУ 4 и 5 соединен со входом первого ограничителя 28 и первым входом первого вычитателя 32, выход которого соединен со входом третьего ограничителя 30, выход которого является вторым выходом РУ 4 и 5. Выход первого ограничителя 28 соединен со вторым входом первого вычитателя 32 и является четвертым выходом РУ 4 и 5. Второй вход РУ 4 и 5 соединен со входом второго ограничителя 29 и первым входом второго вычитателя 33, выход которого соединен со входом четвертого ограничителя 31, выход которого является первым выходом РУ 4 и 5. Выход второго ограничителя 29 соединен со вторым входом второго вычитателя 33 и является третьим выходом РУ 4 и 5.
Демодулятор работает следующим образом.
На вход демодулятора поступает сигнал КАМ-16, который в декартовом базисе может быть представлен в виде:
где ω0- несущая частота сигнала КАМ-16;
А, В, С, D - выбираемые из набора {+1;-1} информационные символы;
N(t) - аддитивный шум.
Преобразуем выражение (1) к следующему виду:
Sвх = S1+(1/2)S2+N(t), (2)
где S1 = Acosω0t+Bsinω0t; (3)
S2 = Ccosω0t+Dsinω0t (4)
Анализ выражений (3) и (4) показывает, что каждое из них описывает сигнал четырехпозиционной фазовой манипуляции ФМ-4, причем в качестве информационных сигналов выступают наборы {А; В} и {С; D} соответственно.
Выражение (2) хорошо согласуется с принципом так называемого суперпозиционного формирования сигнала КАМ-16 (см. Полежаев В.А., Визель А.А. Высокоскоростные фазовые модуляторы и демодуляторы для цифровых систем передачи СВЧ диапазона. Зарубежная радиоэлектроника, 1980, 3 - [5]), при котором сигнал КАМ-16 образуется путем суммирования двух сигналов ФМ-4, из которых один ослаблен относительно другого на 6 дБ (это соответствует множителю 1/2 в выражении (2)).
На вторые входы (входы опорного колебания) всех ФД приходит с выхода ГУН сигнал вида:
Sоп = cos(ω0t+ϕ), (5)
где ϕ - фазовое рассогласование.
В соответствии с этим и принципом работы блоков 23-27, на первом выходе первого ФД 1 (фиг.2) будет формироваться сигнал
а на втором выходе первого ФД 1 будет формироваться сигнал
где n1(t) и n2(t) - квадратурные низкочастотные составляющие шумового процесса N(t)
Перемножители 13 и 14, ограничители 15 и 16 и второй вычитатель 9 образуют известную схему Костаса, позволяющую формировать на выходе второго вычитателя 9 для сигнала ФМ-4 управляющее напряжение для восстановления несущей частоты в петле фазовой автоподстройки частоты (ФАПЧ).
В состоянии захвата ϕ_→0 и, в соответствии с выражениями (6), (7) и логикой работы РУ 4 (фиг.3), на его первом-четвертом выходах будут формироваться переданные символы D, C, B, А соответственно (в соответствии с принципом работы блоков 28-31).
Тогда на выходе первого ЧПМ 6 будет сформирован сигнал вида S2 (см. выражение (4)) и соответственно на выходе первого вычитателя 8 будет формироваться сигнал S8 вида:
S8 = Sвх-(1/2)•S2. (8)
Подставляя в выражение (8) выражение (2), получаем:
S8=S1+N(t). (9)
Поскольку на выходе второго ЧПМ 7 формируется сигнал S1 вида (3), то на выходе третьего вычитателя 10 формируется сигнал S10 вида:
S10=S8-S1,
S10=N(t).
После этого сигнал N(t), выделенный таким образом из входной смеси (1) сигнала с шумом, проходя через усилитель 12 с коэффициентом усиления К и сумматор 11, добавляется к входному сигналу Sвx, что эквивалентно ухудшению отношения сигнал/шум смеси, поступающей на первый вход третьего ФД 3.
Выделенный таким образом шум (из входной смеси сигнала и шума) не может быть никаким образом (например, путем вычитания N(t) из Sвx) использован для улучшения помехоустойчивости демодуляции сигналов в ФД 1-РУ 4. Это связано с тем, что собственно процедура получения реализации шума N(t) на каждом интервале длительности символа сигнала КАМ-16 реализуется только в предположении об отсутствии ошибок на выходах РУ 4 (границами такого допущения является теория потенциальной помехоустойчивости А. Котельникова).
Таким образом, выделенный из входного сигнала шум N(t) никаким образом нельзя использовать для уменьшения самой вероятности ошибки на выходе демодулятора, зато его можно использовать для оценки вероятности этой ошибки (т.е. качества сигнала).
Оценка вероятности битовой ошибки происходит путем выполнения следующих операций над сигналом.
Как известно, при демодуляции независимых и равновероятных символов сигнала КАМ-16, вероятность ошибки в символе вычисляется с помощью некоторой функции
Рс=f(Rвх),
где Рc - вероятность ошибки в символе;
Rвx - входное отношение сигнал/шум.
При кодировании сигнала КАМ-16 манипуляционным кодом Грея (что практически всегда реализуется на практике),
P≈(1/4)Pc,
где Р - вероятность ошибки в бите, т.е. вероятность ошибки в каждом из четырех парциальных каналов.
Точное аналитическое выражение функции f для сигналов КАМ-16 имеет достаточно сложный вид, поэтому на практике обычно пользуются широко известными графическими представлениями функции (см., например, Феер К. Беспроводная цифровая связь. М.: Радио и связь, 2000 - с.248, рис. 4.8.3 - [6]).
По известным из литературы (например, [6]) зависимостям
P = (1/4)Pc = (1/4)f(Rвх)
можно найти следующее характерное значение вероятности ошибки в каждом парциальном канале:
Р=10-4 при Rвx = 13,2 дБ.
На выходе сумматора 11 отношение сигнал/шум меньше, чем входное отношение сигнал/шум.
Отношение сигнал/шум R11 на выходе сумматора 11 находят из следующих формул:

где Sкам - входной полезный сигнал КАМ-16.
Из последнего выражения следует, что третий ФД 3 демодулирует сигнал КАМ-16 в условиях отношения сигнал/шум, на 10lg(1+K), дБ меньшего, чем первый ФД 1. В частности, при К = 1 уменьшение отношения сигнал/шум составляет 6 дБ.
Первый-четвертый элементы ИЛИ 19-22 осуществляют сравнение сигналов на соответствующих выходах решающих устройств 4 и 5 (А и Ак; В и Вк; С и Ск; D и Dк). Если Rвx достаточно велико, то вероятностью ошибки на выходе первого РУ 4 можно пренебречь и считать, что все импульсы несовпадения на пятом-восьмом выходах устройства есть следствие ухудшения отношения сигнал/шум на величину 10lg(1+К), дБ.
Тогда, измеряя частоту появления импульсов на пятом-восьмом выходах устройства, можно косвенно оценить вероятность ошибки соответственно на первом-четвертом выходах устройства.
Таким образом, измеряя Рн, можно найти Rвх при помощи обратного решения уравнения
Pн = (1/4f)(Rвх-10lg(1+K)),
где Рн - частота появления импульсов на пятом восьмом выходах устройства, т.е. вероятность несовпадения символов А и Ак (или В и Вк, или С и Ск, или D и Dк). Зная Rвx, при помощи прямого решения уравнения
P = (1/4f)(Rвх),
можно найти вероятность ошибки в каждом из парциальных цифровых каналов (на каждом их четырех выходов демодулятора сигналов КАМ-16).
Например, пусть Rвх составляет величину более 10 дБ, неизвестную точно и соответственно неизвестно точное значение Р. Пусть коэффициент усиления усилителя 12 К выбран таким, что на выходе сумматора 11 приводит к ухудшению отношения сигнал/шум на 3 дБ.
Допустим, что измеренная частота импульсов несовпадений сигналов А и Aк составляет Рн= 5•10-2. Тогда по кривой f(Rвх-3 дБ) можно найти, что Rвх=10 дБ, и соответственно по кривой f(Rвх) можно найти, что Р=5•10-5.
Таким образом, за счет формирования шумовой компоненты из входного сигнала и, с ее помощью, ухудшения отношения сигнал/шум в контрольном фазовом детекторе, в заявляемом демодуляторе достигается технический результат: измерение вероятности ошибки в каждом их четырех парциальных цифровых каналов.
При этом в заявляемом демодуляторе измерение вероятности ошибки происходит непосредственно по графиковому (информационному) сигналу, в котором может отсутствовать заранее оговоренная в спецификации синхрокомбинация.
Изобретение относится к радиотехнике. Технический результат заключается в оценивании в демодуляторе вероятности ошибки в каждом из четырех парциальных цифровых каналов передачи информации. Сущность изобретения состоит в том, что входной сигнал шестнадцатипозиционной квадратурной амплитудной манипуляции (КАМ-16) когерентно демодулируют и получают на выходе демодулятора тетраду демодулированных символов {A; B; C; D}, формируют первый и второй сигналы четырехпозиционной фазовой модуляции (ФМ-4), усиливают в К раз полученный шумовой сигнал и суммируют его с входным сигналом КАМ-16 и, измеряя частоту импульсного потока несовпадений для каждого из четырех парциальных каналов, получают оценку вероятности ошибки в цифровых символах {A; B; C; D} на выходе демодулятора. 2 з.п. ф-лы, 3 ил.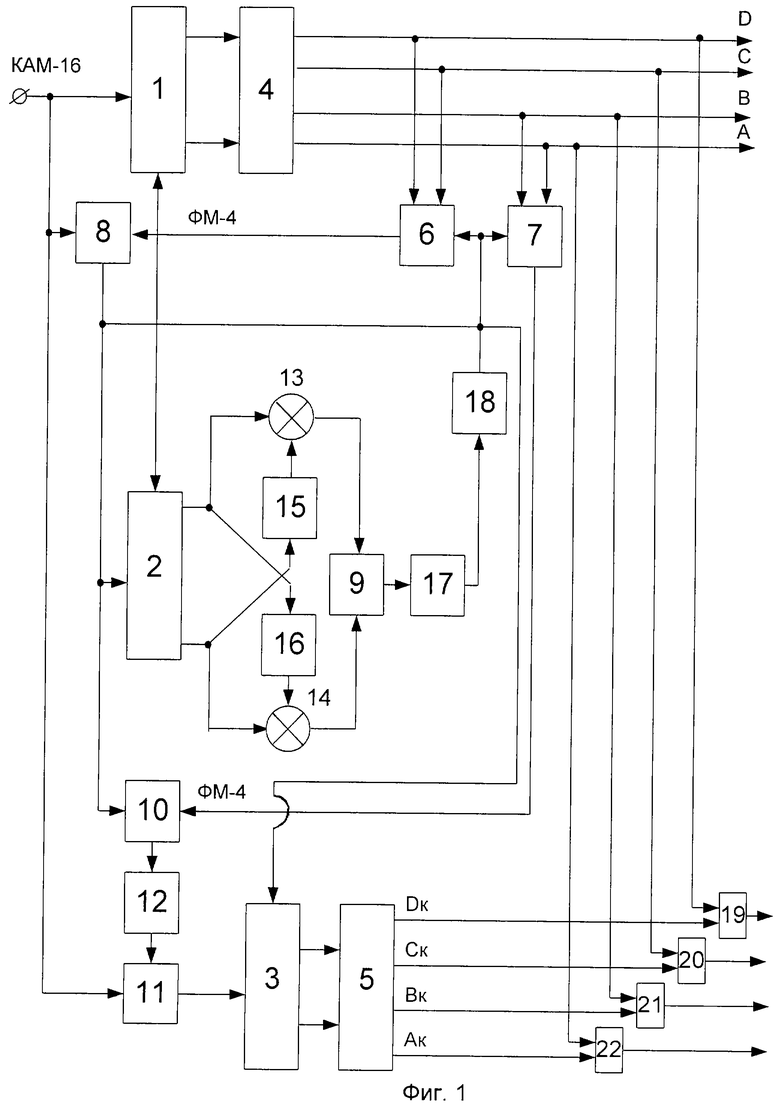
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2013018C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1991 |
|
RU2019055C1 |
| Демодулятор сигналов квадратурной амплитудной манипуляции | 1990 |
|
SU1758899A1 |
| US 5940451 A1, 17.08.1999 | |||
| ЕР 1107531 А1, 13.06.2001. | |||

