Изобретение относится к технике связи и может использоваться в системах дальней космической связи для обнаружения сигнала при приеме в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием значительной величины доплеровского смещения частоты в канале связи.
Для целей мгновенного обнаружения радиосигналов в отмеченных областях техники широко используются пороговые обнаружители радиосигналов радиометрического типа, корреляционного типа [1-3] и др. Большинство из них предназначено для работы в условиях параметрической определенности, что сужает область их использования в условиях априорной неизвестности или нестабильности несущей частоты сигнала. Так, например, известен используемый для обнаружения слабого радиосигнала бинарный пороговый обнаружитель, содержащий последовательно соединенные полосовой фильтр (ПФ), квадратичный детектор, на выходе которого включена схема, компенсирующая постоянную шумовую составляющую, после которой подключается пороговое устройство [4, 5]. Такой обнаружитель является радиометрическим компенсационным обнаружителем.
Обнаружение сигнала имеет большое значение в системах дальней космической связи с космическими аппаратами (КА) типа Mars Polarlander, Mars Pathfinder [6] или с КА типа Voyager и Galileo [7], особенно когда необходимо осуществлять наведение на источник сигнала антенн с узкими диаграммами направленности. В последнем случае требуется детектировать огибающие сигналов с широким классом форматов модуляции, поскольку исторически в космических системах передачи данных широко используются различные форматы модуляции [8-10].
Известен простой бинарный пороговый обнаружитель, построенный на базе квадратичного детектора огибающей сигнала и порогового устройства [8, 9], однако он не позволяет эффективно обнаруживать сигнал в условиях большой априорной неопределенности частоты несущей сигнала, когда полоса сигнала существенно меньше входной полосы частот, поскольку в таких условиях квадратичный детектор будет детектировать всю мощность смеси сигнала и шума, а следовательно, затруднит селекцию направления на источник сигнала при его использовании для обеспечения наведения на источник сигнала антенн с узкими диаграммами направленности станций приема систем дальней космической связи.
Известен бинарный пороговый обнаружитель [11], содержащий ПФ, вход которого является входом обнаружителя, и пороговое устройство (ПУ), выход которого является выходом обнаружителя. Между ПФ и ПУ последовательно включены первый и второй узкополосные заграждающие фильтры (ПЗФ) и фазовый детектор (ФД), второй вход которого подключен к выходу ПФ. Известный обнаружитель наиболее близок к предлагаемому обнаружителю сигнала по функциональному построению и техническим характеристикам, поэтому принят за прототип.
Устройство-прототип работает следующим образом. При подаче сигнала на вход ПФ часть сигнала попадает на первый вход ФД, другая часть сигнала, со второго выхода ПФ, после последовательного прохождения через узкополосные ПЗФ с соответствующим сдвигом по фазе попадает на второй вход ФД.
По сравнению с известными устройствами [8-9, 12-13] в устройстве-прототипе принципиально снижается вероятность ложного обнаружения на 3 порядка за счет использования высокодобротных ПЗФ.
Однако применение устройства-прототипа для обеспечения обнаружения сигналов и наведения антенн с узкими диаграммами направленности в станциях приема систем дальней космической связи на источник сигнала также в ряде случаев может оказаться неприемлемым. Устройство-прототип хотя и имеет лучшие характеристики по вероятности ложного обнаружения по сравнению с обнаружителем на базе квадратичного детектора [8-9, 12-13], но в полосе обнаружения, по сути, ему эквивалентно, а поэтому обладает во многом теми же недостатками. В частности, когда полоса сигнала существенно меньше входной полосы частот, он также детектирует всю мощность смеси сигнала и шума.
Поэтому при попытках обнаружения сигналов КА типа Voyager и Galileo, в частности, в диапазоне частот 8400-8500 МГц на больших расстояниях от поверхности Земли, когда скорость передачи информации для обеспечения энергетического доступа к сигналу с борта КА снижается до нескольких килобит в секунду [7], устройство-прототип может не обеспечить обнаружение сигнала в заданном направлении на КА. Согласно стандарту международного консультативного комитета по космическим системам передачи данных [10, стр.2.3.3В-1] расстройка по частоте в диапазоне частот 8400-8500 МГц для КА категории В (КА, удаленные от поверхности Земли в соответствии с возложенными на них задачами на расстояние более 2 миллионов километров, к которым относятся упомянутые выше КА типа Voyager и Galileo) составляет по меньшей мере ±1 МГц, что на несколько порядков больше полосы сигнала. При использовании устройства-прототипа этот факт приводит к детектированию шума во всей принимаемой полосе. Если реальное входное отношение сигнал/шум в согласованной полосе составляет величину порядка 10-16 дБ, вышеуказанное расширение полосы в силу частотной неопределенности до 2 МГц для сигналов с шириной полосы 40 кГц приведет к падению отношения сигнал/шум на 17 дБ.
Техническим результатом заявляемого изобретения является возможность обнаружения сигнала при приеме сигналов с различными форматами модуляции в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием значительной величины доплеровского смещения частоты в канале связи, за счет инвариантной к частоте сигнала автокорреляционной обработки смеси сигнала с шумом, учитывающей тот факт, что интервал корреляции сигнала во много раз превышает интервал корреляции шума.
Технический результат достигается тем, что в известном обнаружителе сигнала, содержащем пороговое устройство, выход которого является выходом обнаружителя, и последовательно соединенные полосовой фильтр, вход которого является входом обнаружителя, и фазовый детектор (ФД), согласно изобретению, к выходу полосового фильтра подключен второй ФД, причем постоянная времени обоих ФД обратно пропорциональна полуширине полосы пропускания полосового фильтра, вторые входы обоих ФД подключены к генератору синусоидального сигнала, частота которого равна центральной частоте диапазона входных сигналов, при этом второй вход первого ФД связан с генератором сигнала непосредственно, а второй вход второго ФД - через фазовращатель, выход первого ФД соединен со входами первого и второго перемножителя и первого элемента памяти, выход которого связан со вторыми входами первого и третьего перемножителей, выход второго ФД соединен с входами третьего и четвертого перемножителей и входом второго элемента памяти, выход которого связан со вторыми входами второго и четвертого перемножителей, выходы первого и четвертого перемножителей подключены к входам первого сумматора, выходы второго и третьего перемножителей соединены с входами вычитателя, причем выход третьего перемножителя соединен с вычитающим входом вычитателя, выход которого связан с входом первого квадратора через первый фильтр нижних частот (ФНЧ), выход первого сумматора соединен со входом второго квадратора через второй ФНЧ, при этом ширина полосы первого и второго ФНЧ обратно пропорциональна длительности символа входного сигнала за вычетом постоянной времени элемента памяти, выходы обоих квадраторов через последовательно включенные второй сумматор и третий ФНЧ связаны с входом порогового устройства, а величина постоянной времени третьего ФНЧ не меньше длительности символа входного сигнала.
На чертеже приведена структурная схема обнаружителя сигнала.
Обнаружитель сигнала (см. чертеж), к входу которого подключен полосовой фильтр (ПФ) 1, содержит пороговое устройство (ПУ) 2, выход которого является выходом обнаружителя сигнала, соединенное через третий фильтр нижних частот (ФНЧ) 3 и второй сумматор (С) 4 с выходами первого 5 и второго 6 квадраторов (К). Выход полосового фильтра 1 связан с первыми входами фазовых детекторов (ФД) 7 и 8. Вторые входы фазовых детекторов 7 и 8 подключены к генератору (Г) 9, при этом второй вход первого фазового детектора 7 связан с генератором 9 непосредственно, а второй вход второго фазового детектора 8 - через фазовращатель (ФВ) 10. Между выходом первого фазового детектора 7 и входом второго квадратора 6 последовательно включены первый перемножитель (П) 11, первый сумматор 12 и второй фильтр нижних частот 13. Между выходом первого фазового детектора 7 и входом первого квадратора 5 последовательно включены второй перемножитель 14, вычитатель (В) 15 и первый фильтр нижних частот 16. Между выходом второго фазового детектора 8 и входом первого сумматора 12 включен четвертый перемножитель 17. Первый фазовый детектор 7 также подключен к вычитающему входу вычитателя 15 через последовательно соединенные первый элемент памяти (ЭП) 18 и третий перемножитель 19. Второй вход первого перемножителя 11 соединен также с выходом первого элемента памяти 18, а между входами четвертого перемножителя 17 включен второй элемент памяти 20. Выход второго ФД 8 соединен со вторым входом третьего перемножителя 19 непосредственно, а со вторым входом второго перемножителя 14 через второй элемент памяти 20.
Предлагаемый обнаружитель сигнала работает следующим образом.
Сигнал в смеси с шумом с входа устройства подается на вход полосового фильтра 1 (см. чертеж), откуда после фильтрации поступает на первые входы двух фазовых детекторов 7 и 8. На второй вход первого фазового детектора 7 сигнал с генератора 9 подается напрямую, а на второй вход второго фазового детектора 8 сигнал с генератора 9 подается повернутым на 90° фазовращателем 10. Результат фазового детектирования фазового детектора 7 содержит синфазную составляющую входного сигнала. На выходе фазового детектора 8 содержится квадратурная составляющая входного сигнала. Далее в устройстве формируется одна компонента сигнала как результат суммирования в сумматоре 12 произведения в перемножителе 11 сигнала с выхода фазового детектора 7 с сигналом, задержанным в элементе памяти 18 и произведения в перемножителе 17 сигнала с выхода фазового детектора 8 с задержанным в элементе памяти 20 сигналом. Также в устройстве формируется другая компонента сигнала как результат разности в вычитателе 15 произведения в перемножителе 19 сигнала с выхода фазового детектора 8 с задержанным в элементе памяти 18 сигналом и произведения в перемножителе 14 сигнала с выхода фазового детектора 7 с задержанным в элементе памяти 20 сигналом. Каждая из указанных компонент фильтруется в ФНЧ 13 и 16 соответственно, в полосе, ширина которой обратно пропорциональна длительности символа за вычетом постоянной времени элемента памяти. Сигнал с выхода ФНЧ 13 возводится в квадрат квадратором 6. Сигнал с выхода ФНЧ 16 возводится в квадрат квадратором 5. Сигналы с выходов квадраторов 5 и 6 суммируются в сумматоре 4. Суммарный сигнал, отфильтрованный ФНЧ, 3 подается на пороговое устройство 2, где, по превышению порога обнаружения, принимается решение о наличии сигнала в заданной полосе на заданном направлении.
Работа предложенного обнаружителя сигнала основана на том, что, если в квадратурные плечи, соответствующим образом, подставить сигнал, задержанный на интервал времени, во много раз превышающий интервал корреляции шума, но существенно меньший (в два и более раз) длительности символа сигнала (интервала корреляции сигнала), то ценой потери части энергии сигнала на интервале времени его запаздывания можно существенно уменьшить влияние шумов на характеристики обнаружителя по сравнению с прототипом в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием большой величины доплеровского смещения частоты в канале связи, в случаях, когда применение прототипа уже невозможно.
Покажем, что в предложенном бинарном обнаружителе сигнала реализуется указанная обработка сигнала при различных форматах модуляции.
Представим модель принимаемого сигнала r(t) как аддитивную смесь переданного сигнала s(t) и аддитивного полосового гауссовского шума n(t):

Сигнал с дискретной квадратурной амплитудной и угловой модуляцией, в достаточно общем случае, можно описать моделью [9, 10]:



где функция модулирующего импульса p(t) в частных случаях квадратурной амплитудной манипуляции (КАМ), двухпозиционной (2ФМн) и четырехпозиционной (4ФМн) фазовой манипуляции описывается как
и где √2·А - амплитуда сигнала, ƒc - несущая частота сигнала, ϕc - начальная фаза сигнала, Т - длительность символа, ε - начальная фаза тактовой частоты сигнала,  ,
,  - случайные независимые, идентично распределенные и равновероятные информационные символы сообщения. При этом для двухпозиционной и четырехпозиционной фазовой манипуляции К=1.
- случайные независимые, идентично распределенные и равновероятные информационные символы сообщения. При этом для двухпозиционной и четырехпозиционной фазовой манипуляции К=1.
Функции модулирующего импульса p(t) для синфазного квадратурного каналов в более общем случае четырехпозиционной фазовой манипуляции со сдвигом (4ФМнС или OQPSK), манипуляции минимальным сдвигом (ММС или MSK), гауссовской манипуляции минимальным сдвигом (ГММС или GMSK) несколько различаются и представлены в [9, 10].
Определим для последующего укороченные модулирующие импульсы pτ(t) и pT-τ(t) такие, что
Модель аддитивного полосового гауссовского шума n(t) через его огибающую n0(t) можно представить следующим образом:

где ƒ0 равна центральной частоте диапазона входных частот сигнала, ϕ0 - начальная фаза сигнала генератора, относительно которого осуществляется квадратурное разложение принимаемого входного сигнала r(t).
У аддитивного полосового гауссовского шума в полосе входных частот спектральная плотность мощности обычно равномерна и равна

Для упрощения обозначений, без потери общности, амплитуду сигнала можно положить равной единице, а полные фазы сигнала записать в виде

Сигнал генератора на входе первого ФД равен

а на входе второго ФД соответственно

Учитывая усреднение сигналов фазовыми детекторами с исключением осциллирующих компонент на выходах первого и второго ФД сигналы  и
и  соответственно равны
соответственно равны


Сумма сигналов на выходе первого сумматора равна

где первое слагаемое - результат перемножения в первом перемножителе сигналов с выходов первого ФД и первого элемента памяти, а второе слагаемое - результат перемножения в четвертом перемножителе сигналов с выходов второго ФД и второго элемента памяти соответственно.
Разность сигналов на выходе вычитателя равна

где первый компонент в выражении (15) - результат перемножения во втором перемножителе сигналов с выходов первого ФД и второго элемента памяти, а второй компонент в выражении (15) - результат перемножения в третьем перемножителе сигналов с выходов второго ФД и первого элемента памяти соответственно.
С использованием определений (6), (9) и равенств (12)-(13), а также применением известных тригонометрических тождеств выражение (15) преобразуются к следующему виду:
С использованием определений (3)-(6) каждое из слагаемых в первых квадратных скобках выражения (16) можно разбить на две частичные суммы

и

Первые суммы в (17) и (18) не зависят от передаваемой информации. После низкочастотной фильтрации в первом ФНЧ (в определенном смысле эквивалентной операции усреднения, поскольку его постоянная времени, равная Т-τ, велика по сравнению с интервалом корреляции шума, и с временем задержки τ в элементах памяти) вследствие независимости символов сообщения ,  , ,
, ,  , некоррелированности сигнала и шума, а также ввиду осциллирующего характера большинства шумовых слагаемых (со второго по шестое) в выражении (16) отфильтрованный сигнал
, некоррелированности сигнала и шума, а также ввиду осциллирующего характера большинства шумовых слагаемых (со второго по шестое) в выражении (16) отфильтрованный сигнал  можно приблизить следующим выражением:
можно приблизить следующим выражением:
Проделав аналогичные тригонометрические выкладки, отфильтрованный сигнал  можно приблизить другим выражением
можно приблизить другим выражением

На интервале длительности модулирующего импульса Т выражения (19) и (20) с учетом выражений (6) и с учетом того, что τ≪T можно приблизить еще более простыми выражениями

Если для упрощения анализа принять, что первый и второй ФНЧ, предлагаемого обнаружителя сигналов, имеют идеальную прямоугольную форму с частотой среза b=1/Т, то при неизменности спектральной плотности мощности шума на их входе дисперсия шума (равная его мощности) на их выходе уменьшится пропорционально отношению входной полосы В к полосе на выходах упомянутых ФНЧ b=1/T, что обеспечит выигрыш обработки G (по сравнению с прототипом) равный

Дальнейшая обработка позволяет исключить зависимость от фазы сигнала, а следовательно, и от неопределенности по частоте путем квадрирования сигналов и и их последующего суммирования. Решение о наличии или отсутствии полезного сигнала в заданной ПФ полосе принимается так же, как и в устройстве-прототипе, при помощи ПУ. Поскольку проведенный анализ осуществлен для достаточно обобщенной модели смеси сигнала с шумом, то он свидетельствует о наличии указанного выше выигрыша обработки для широкого класса форматов модуляции в условиях высокой априорной неопределенности по частоте. Предложенный обнаружитель превосходит за счет указанного выигрыша обработки известные обнаружители сигналов [11-13].
Таким образом, предлагаемое устройство обеспечивает обнаружение сигнала в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием большой величины доплеровского смещения частоты в канале связи.
Источники информации
1. Вакин Л.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. Радио, 1968.
2. Мирский Г.Я. Радиоэлектронные измерения. - М.: Энергия, 1969.
3. Тузов Г.И. Статистическая теория приема сложных сигналов. - М.: Сов. радио, 1977.
4. Есепкина Н.А., Корольков Д.В., Парийский Ю.Н. Радиотелескопы и радиометры. - М.: Наука, 1973, стр.257-270.
5. Николаев А.Г., Перцов С.В. Радиотеплолокация. - М.: ВИМО, 1970.
6. Harcke, L., and G.Wood, Laboratory and Flight Performance of the Mars Pathfinder (15, 16) Convolutionally Encoded Telemetry Link, TDA PR 42-129, January-March 1997, pp.1-11, May 15, 1997.
7. Rebold, Т.А., М.Tinto, S.W.Asmar, and E.R.Kursinski, Neptune Revisited: Synthesizing Coherent Doppler From Voyager's Noncoherent Downlink, TDA PR 42-131, July-September 1997, pp.1-19, November 15, 1997
8. Спилкер Дж. Цифровая спутниковая связь М., Связь, 1979, - 592 с.
9. Feher K. Digital communications: Satellite/Earth stations Engineering N-Y., Prentice-Hall, 1983.
10. CCSDS RECOMMENDATIONS FOR RADIO FREQUENCY AND MODULATION SYSTEMS, Part 1, Earth Stations and Spacecraft, CCSDS 401.0-B BLUE BOOK, NASA, Greenbelt, Maryland USA, November, 1994.
11. Патент РФ, RU 2185638, 7 G 01 S 7/292, Скрипкин А.А., Олейникова Л.В., Пороговый бинарный обнаружитель, 2002 г. (прототип).
12. Microwave Systems News №12, December 1981, pp.60-80.
13. Microwave Systems News №7, July 1984, pp.233-262.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОР ОГИБАЮЩЕЙ СИГНАЛА | 2003 |
|
RU2234813C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ НЕСУЩЕЙ И ОПОРНОЙ ЧАСТОТ В КАНАЛЕ СВЯЗИ СО ЗНАЧИТЕЛЬНЫМИ ЧАСТОТНЫМИ НЕСТАБИЛЬНОСТЯМИ И ОГРАНИЧЕНИЯМИ НА ЭНЕРГЕТИКУ | 2010 |
|
RU2451408C2 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА | 1992 |
|
RU2044327C1 |
| АДАПТИВНЫЙ КЛАССИФИКАТОР СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2008 |
|
RU2365052C1 |
| Устройство контроля исправности кольца фазовой автоподстройки частоты | 1988 |
|
SU1506395A1 |
| УСТРОЙСТВО АНАЛИЗА ПАРАМЕТРОВ МОДУЛЯЦИИ ИМПУЛЬСНЫХ СИГНАЛОВ | 1976 |
|
SU1840896A1 |
| Следящий фильтр для обработки фазоманипулированного псевдослучайного радиосигнала | 1985 |
|
SU1370793A1 |
| НЕКОГЕРЕНТНЫЙ ОБНАРУЖИТЕЛЬ ПСЕВДОСЛУЧАЙНЫХ СИГНАЛОВ ПРИ ЧАСТОТНЫХ НЕСТАБИЛЬНОСТЯХ В КАНАЛЕ СВЯЗИ | 2007 |
|
RU2345481C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ПРИЕМНЫХ УСТРОЙСТВ ПО НЕСУЩЕЙ И ТАКТОВОЙ ЧАСТОТАМ В СИСТЕМАХ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ В УСЛОВИЯХ БОЛЬШОЙ НЕСТАБИЛЬНОСТИ ЧАСТОТ В КАНАЛЕ СВЯЗИ | 2011 |
|
RU2450446C1 |
Изобретение относится к технике связи и может использоваться в системах дальней космической связи для обнаружения сигнала при приеме в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием значительной величины доплеровского смещения частоты в канале связи. Техническим результатом заявляемого изобретения является возможность обнаружения сигнала при приеме сигналов с различными форматами модуляции в условиях априорной неопределенности или нестабильности несущей частоты сигнала, вызванной, в частности, наличием значительной величины доплеровского смещения частоты в канале связи, за счет инвариантной к частоте сигнала автокорреляционной обработки смеси сигнала с шумом, учитывающей тот факт, что интервал корреляции сигнала во много раз превышает интервал корреляции шума. Технический результат достигается тем, что в известном обнаружителе сигнала, содержащем пороговое устройство, выход которого является выходом обнаружителя, и последовательно соединенные полосовой фильтр, вход которого является входом обнаружителя, и фазовый детектор (ФД), согласно изобретению, к выходу полосового фильтра подключен второй ФД, причем постоянная времени обоих ФД обратно пропорциональна полуширине полосы пропускания полосового фильтра, вторые входы обоих ФД подключены к генератору синусоидального сигнала, частота которого равна центральной частоте диапазона входных сигналов, при этом второй вход первого ФД связан с генератором сигнала непосредственно, а второй вход второго ФД - через фазовращатель, выход первого ФД соединен со входами первого и второго перемножителя и первого элемента памяти, выход которого связан со вторыми входами первого и третьего перемножителей, выход второго ФД соединен с входами третьего и четвертого перемножителей и входом второго элемента памяти, выход которого связан со вторыми входами второго и четвертого перемножителей, выходы первого и четвертого перемножителей подключены к входам первого сумматора, выходы второго и третьего перемножителей соединены с входами вычитателя, причем выход третьего перемножителя соединен с вычитающим входом вычитателя, выход которого связан с входом первого квадратора через первый фильтр нижних частот (ФНЧ), выход первого сумматора соединен со входом второго квадратора через второй ФНЧ, при этом ширина полосы первого и второго ФНЧ обратно пропорциональна длительности символа входного сигнала за вычетом постоянной времени элемента памяти, выходы обоих квадраторов через последовательно включенные второй сумматор и третий ФНЧ связаны с входом порогового устройства, а величина постоянной времени третьего ФНЧ не меньше длительности символа входного сигнала. 1 ил.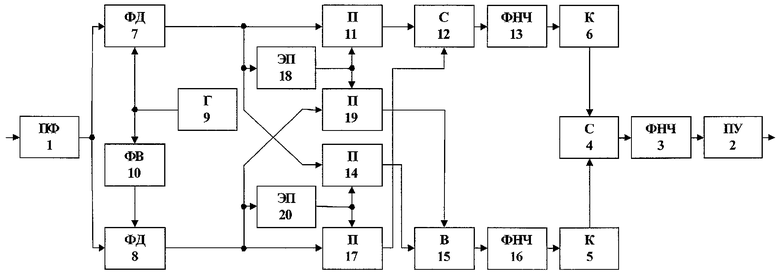
Обнаружитель сигнала, содержащий пороговое устройство, выход которого является выходом обнаружителя, и последовательно соединенные полосовой фильтр, вход которого является входом обнаружителя, и фазовый детектор (ФД), отличающийся тем, что к выходу полосового фильтра подключен второй ФД, причем постоянная времени обоих ФД обратно пропорциональна полуширине полосы пропускания полосового фильтра, вторые входы обоих ФД подключены к генератору синусоидального сигнала, частота которого равна центральной частоте диапазона входных сигналов, при этом второй вход первого ФД связан с генератором сигнала непосредственно, а второй вход второго ФД - через фазовращатель, выход первого ФД соединен со входами первого и второго перемножителя и первого элемента памяти, выход которого связан со вторыми входами первого и третьего перемножителей, выход второго ФД соединен с входами третьего и четвертого перемножителей и входом второго элемента памяти, выход которого связан со вторыми входами второго и четвертого перемножителей, выходы первого и четвертого перемножителей подключены к входам первого сумматора, выходы второго и третьего перемножителей соединены с входами вычитателя, причем выход третьего перемножителя соединен с вычитающим входом вычитателя, выход которого связан с входом первого квадратора через первый фильтр нижних частот (ФНЧ), выход первого сумматора соединен со входом второго квадратора через второй ФНЧ, при этом ширина полосы первого и второго ФНЧ обратно пропорциональна длительности символа входного сигнала за вычетом постоянной времени элемента памяти, выходы обоих квадраторов через последовательно включенные второй сумматор и третий ФНЧ связаны с входом порогового устройства, а величина постоянной времени третьего ФНЧ не меньше длительности символа входного сигнала.
| ПОРОГОВЫЙ БИНАРНЫЙ ОБНАРУЖИТЕЛЬ | 2000 |
|
RU2185638C2 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1991 |
|
RU2106652C1 |
| US 6362777 В2, 26.03.2002 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

