Изобретение относится к области сельскохозяйственного машиностроения и предназначено для использования в машинах для уборки кормов, валковых жатках и зерноуборочных комбайнах.
Известен кривошипно-шатунный механизм, широко применяющийся в косилках и кормоуборочных комбайнах (Н.И.Кленин, В.А.Сакун. Сельскохозяйственные и мелиоративные машины. - М.: Колос, 1994, с. 342, рис. а). Он состоит из кривошипа и шатуна, шарнирно соединенного с ножом.
Известен шестизвенный пространственный механизм, применяемый в комбайнах и валковых жатках (Н.И.Кленин, В.А.Сакун. Сельскохозяйственные и мелиоративные машины. - М.: Колос, 1994, с. 422). В отличие от кривошипно-шатунного механизма между шатуном и ножом установлено дополнительное звено - коромысло. Этот механизм применяют для привода ножа фронтальных жаток. При использовании таких жаток на обкосах и прокосах растения наматываются на движущие звенья механизма привода. Этот недостаток устраняется применением кривошипно-шатунного механизма с водилом, который используется в жатках с фронтальным расположением ножа, особенно при уборке бобовых культур. Такой механизм передает движение пальцу в центральной его части (Н.И. Кленин, В.А. Сакун. Сельскохозяйственные и мелиоративные машины. - М.: Колос, 1994, с. 422, рис. а и б).
Привод режущего аппарата выполняют в форме кривошипно-шатунного механизма, который обладает следующими недостатками: наличием вертикальных составляющих инерционных сил; большими ускорениями ведомого звена; синусоидальным законом распределения скорости резания, не позволяющим использовать оптимальную скорость на протяжении всего профиля резания.
Известен механизм качающейся шайбы (МКШ), который в последнее время находил все более широкое применение в силу своей компактности в кормо- и зерноуборочных комбайнах и валковых жатках. МКШ снабжен коленчатым ведущим валом, на шейке которого на подшипниках смонтировано водило, кинематически связанное с вилкой колебательного вала, на конце которого закреплен рычаг, соединенный с головкой ножа, звеном, состоящим из двух накладок, образующих шаровые шарниры.
Механизм качающейся шайбы, более компактный и удобный в установке, не устраняет недостатков, присущих кривошипно-шатунным механизмам (Н.И. Кленин, В. А. Сакун. Сельскохозяйственные и мелиоративные машины. - М.: Колос, 1994, с. 132, рис. 5.8).
Известен механизм привода двухножевого режущего аппарата (АС 1218973, кл. А 01 D 34/30 1986 г.), выполненный в виде двухколенчатого кривошипного вала, несущего подшипники, размещенные в окнах кулисы, которые хвостовиками связаны с ножами. Корпус имеет нож для хвостовиков, закрытый подпружиненными сошками.
Известен механизм привода двухножевого режущего аппарата, содержащий корпус, шатуны, соединенные с ножевыми полотнами, приводимыми в возвратно-поступательное движение посредством рамок, установленных на коленчатом валу между направляющими щечками (АС 1517822, кл. А 01 D 34/30, 1989 г.). Рамка выполнена цилиндрически и снабжена сквозным пазом перпендикулярно шатуну. Механизм по АС 1218973, кл. А 01 D 34/30, 1986 г. и АС 1517822, кл. А 01 D 34/30, 1989 г. принципиально аналогичен и имеет общий недостаток - синусоидальный закон изменения скорости резания.
Известен режущий аппарат по АС 1544239, кл. А 01 D 34/30, 1990 г., режущие элементы которого подвешены на концах кривошипных валов, установленных с разных сторон жатки оппозитно друг другу. Такой аппарат совершает возвратно-поступательное движение одновременно в двух направлениях: поперек жатки и вдоль направления ее движения. Основной недостаток такого аппарата - переменная скорость резания.
Известен привод режущего аппарата, отличительной особенностью которого является использование двух дисков с направляющими дорожками, вращающихся в противоположных направлениях с одинаковой угловой скоростью посредством зубчатого зацепления (АС 1496683, кл. А 01 D 34/30, 1988 г.). При этом в одной направляющей расположен отросток штока, а в другой - отросток втулки.
Известен привод режущего аппарата косилки, в котором для снижения энергоемкости устройства в целом привод ножа включает механизм разгона, состоящий из корпуса, связанного тягой с ножом, и пары пружин, разделенных толкателем, кинематически связанным с рычагом, а сам нож устанавливается на плоских упругих пластинах (АС 1547755, кл. А 01 D 34/30, 1987 г.). В аппаратах этого типа скорости резания зависят не только от закона движения приводимого рычага ножа, но и наложения гармоник пружинных элементов пружин механизма разгона и упругих пластин подвеса режущего аппарата. Такой привод аппарата также не обеспечивает постоянство скорости резания.
Наиболее близким по технической сущности к предлагаемому техническому решению является привод режущего аппарата, содержащий корпус, жестко закрепленный на жатке и имеющий два консольных вала, установленных с возможностью вращения в противоположных направлениях с одинаковой угловой скоростью посредством зубчатого зацепления, и режущий нож, установленный в направляющих пальцевого бруса (патент РФ 2032306, кл. А 01 D 34/30, 1995) - прототип.
Недостатком известного технического решения, выбранного в качестве прототипа, является переменная скорость резания растений режущим ножом, что снижает надежность протекания технологического процесса. Это объясняется тем, что при снижении скорости резания в момент его окончания режущий аппарат может забиваться. Кроме того всякий кривошипно-шатунный механизм создает вибрацию в вертикальной плоскости, что также снижает надежность механизма привода и его долговечность. Переменная скорость резания ведет к увеличению оборотов кривошипа, что создает в начале движения ножа повышенную по сравнению с необходимой скорость резания и ведет к повышению энергозатрат.
Техническим решением задачи является снижение энергоемкости, повышенная надежность процесса резания и увеличение долговечности конструкции.
Поставленная цель достигается тем, что в известном приводе режущего аппарата, содержащем корпус, жестко закрепленный на жатке и имеющий два консольных вала, установленных с возможностью вращения в противоположных направлениях с одинаковой угловой скоростью посредством зубчатого зацепления, и режущий нож, установленный в направляющих пальцевого бруса так, что он снабжен кулачками и пружиной, а нож имеет упоры и вертикальную ось с закрепленным на ней подшипником, причем кулачки задают закон движения ножу и закреплены на консольных валах, установленных вертикально, подшипник размещен между кулачками с возможностью поперечного контактирования с ними, а пружина закреплена на корпусе с возможностью взаимодействия с упорами, при этом профили кулачков в пределах от 0 до (π-α) выполнены по спирали Архимеда и установлены на валах в одной плоскости так, что начала спиральных участков профилей кулачков расположены на осевой линии, проходящей через центры их вращения, а сами кулачки развернуты вокруг осевой линии относительно друг друга на 180o, причем угол α, дополняющий угол спирали до угла π, равен
α=π•в/2S,
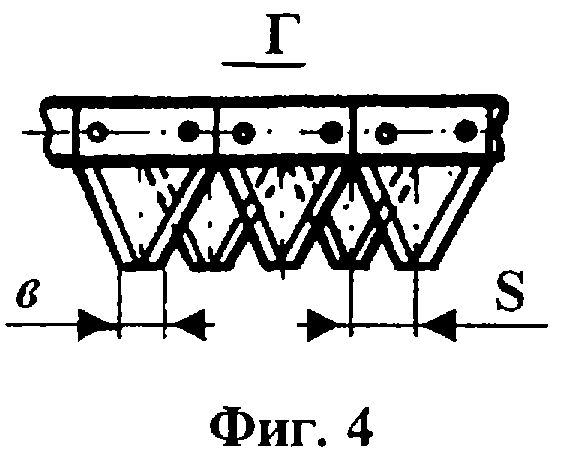
где S - ход ножа в одну сторону;
в - ширина сегмента или вкладыша пальца в его узкой части.
Ход ножа в одну сторону S определяется поворотом кулачка на угол π.
Холостой ход ножа (в/2) происходит при повороте кулачка на угол α. Решая пропорцию S/π=в/2α, получим вышеуказанное выражение.
Новизна заявляемого изобретения обусловлена тем, что благодаря такому выполнению механизма привода скорость движения ножа на всем участке резания остается постоянной, а гашение скорости ножа до нуля при изменении направления его движения на обратное производится на участках холостого хода, определяемых углом α при работе ножа без нагрузки. Возникающие в этот момент силы инерции воспринимаются пружинами, энергия служит для разгона ножа при его движении в обратном направлении.
Расположение кулачков в одной плоскости исключает вероятность возникновения составляющих инерционных сил, действующих в вертикальной плоскости, что повышает надежность аппарата и снижает его энергоемкость.
Выполнение кулачков со скосами под углом α определяют из выражения
α=π•в/2S,
где S - ход ножа в одну сторону;
в - ширина сечения или вкладыша пальца в его узкой части.
Такое выполнение кулачков обеспечивает принудительное движение ножа на протяжении угла (π-α), а в пределах угла α происходит движение ножа под действием сил инерции. В этот момент нож тормозится под действием сил инерции. Это приводит к исключению ударных нагрузок в момент контакта ролика с другим кулачком.
Изобретательский уровень усматривается в том, что совокупность процессов заявленного технического решения проявляет новое свойство прототипа - постоянную скорость резания на протяжении всего рабочего хода, что снижает энергоемкость процесса резания за счет исключения участков, проходимых с завышенной скоростью и повышает надежность технологического процесса за счет принудительного движения ножа в обе стороны, а также долговечность самого привода за счет исключения вертикальных составляющих сил инерции.
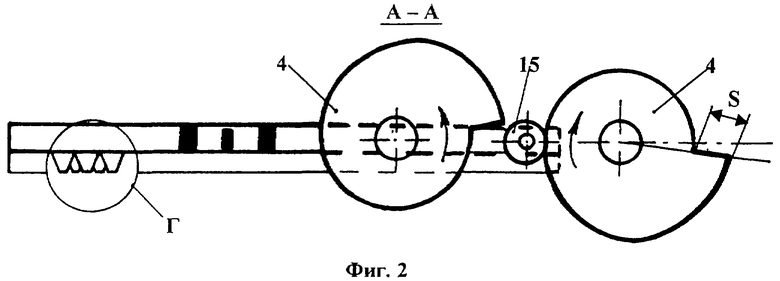
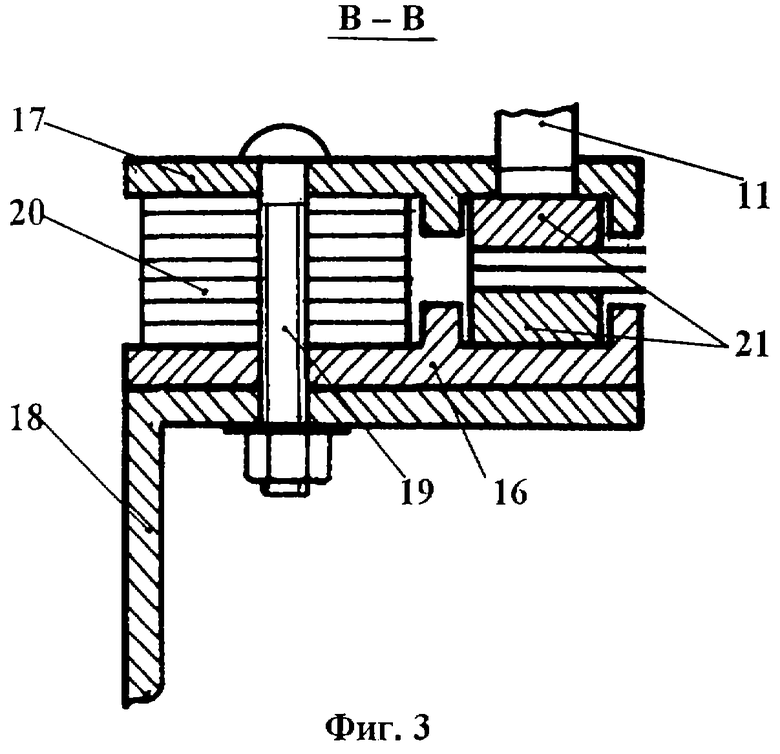
Сущность заявляемого изобретения поясняется чертежами. На фиг. 1 схематично изображен механизм привода режущего аппарата; на фиг. 2 - то же в разрезе по А-А на фиг. 1; на фиг. 3 - то же в разрезе по В-В на фиг. 1; на фиг. 4 - вид Г.
Предлагаемый механизм привода ножа может быть использован в сегментно-пальцевых аппаратах, а также в двух ножевых как с одним движущимся ножом, так и с двумя. В последнем случае для привода второго ножа устанавливается второй привод (зеркальное отображение).
Привод режущего аппарата, закрепленный на жатке (не показано), состоит из корпуса 1, в котором в подшипниковых опорах 2 установлены два вала 3, на нижних консольных участках которых установлены кулачки 4. На внутренней части валов 3, размещенных в корпусе 1, установлены находящиеся в зацеплении шестерни 5 и противовесы 6, уравновешивающие динамические нагрузки на подшипниковые опоры 2. Для привода во вращение один из валов 3 снабжен звездочкой 7. На корпусе 1 крепится упругая пружина 8, расположенная над режущим аппаратом, состоящего из верхнего ножа 9 и нижнего 10, при работе взаимодействующая поочередно с упорами 11 и 12, закрепленными на спинке верхнего ножа 9 (фиг. 3). Верхний нож 9 в передней части со стороны привода снабжен вертикальной осью 14 с установленным на ней подшипником 15, поочередно взаимодействующим с кулачками 4. Ножевые полотна в вершине двухножевого аппарата размещаются между нижней накладкой 16 и верхней 17, фиксирующих их в процессе движения. Накладки 16 и 17 крепятся к брусу 18 болтами 19 через блок регулировочных пластинок 20, позволяющих регулировать зазор между сегментами ножевых полотен.
При использовании нижнего ножевого полотна в качестве неподвижной части режущей пары (взамен пальцев с вкладышами) нижний нож фиксируется от перемещения торцевыми упорами на нижней накладке 16 (не показано). При сборке режущего аппарата вертикальная ось 14 с подшипником 15 устанавливается так, чтобы начало спирали одного из кулачков контактировало с подшипником 15. Центровка ножа (совмещение осей сегментов нижнего и верхнего ножа) выполняется одним из известных способов, например, перемещением корпуса 1 на раме жатки. Аналогичная операция выполняется и в аппарате с двумя активными ножами. В этом случае на жатке устанавливается два одинаковых механизма привода. Второй механизм может быть расположен под первым (зеркальное отображение) или с разных сторон жатки.
Работает механизм привода следующим образом. При включении привода валы 3, получая вращение от звездочки 7, начинают синхронно вращаться в разные стороны. Набегающая на подшипник спиральная часть кулачка перемещает ось 14 с постоянной скоростью. По окончании спиральной части кулачка нож двигается по инерции в пределах его холостого хода, испытывая торможение со сторон пружины 8, взаимодействующей с упором 12, расположенным на спинке ножа. В момент контакта с набегающей спиралью другого кулачка нож начинает двигаться в обратном направлении. Торможение ножа при обратном ходе происходит той же пружиной, но при взаимодействии с упором 11. Далее циклы повторяются.
Использование предлагаемого механизма привода ножа в сравнении с известными устройствами аналогичного назначения существенно снижают энергоемкость резания за счет снижения оборотов привода, одновременно обеспечивая надежность технологического процесса и увеличивая долговечность конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДВУХНОЖЕВОГО РЕЖУЩЕГО АППАРАТА | 1991 |
|
RU2021668C1 |
| ЖАТКА | 2002 |
|
RU2222137C1 |
| ИЗМЕЛЬЧИТЕЛЬ КОРНЕПЛОДОВ | 2001 |
|
RU2201068C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2001 |
|
RU2211556C2 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2008 |
|
RU2380882C1 |
| Жатка двойного среза зерновых культур | 2019 |
|
RU2703913C1 |
| СПОСОБ УБОРКИ КУКУРУЗЫ | 2001 |
|
RU2206198C1 |
| РОТАЦИОННАЯ НОЖЕВАЯ ГОЛОВКА ТАБАКОРЕЗАЛЬНОГО СТАНКА | 2001 |
|
RU2207037C2 |
| Механизм привода широкозахватной жатки | 1982 |
|
SU1068065A1 |
| Привод двухножевого режущего ап-пАРАТА СЕльСКОХОзяйСТВЕННОй MA-шиНы | 1979 |
|
SU801786A1 |
Привод включает корпус с двумя установленными в подшипниковых опорах валами. На нижних концах валов установлены кулачки. Часть профиля кулачков выполнена по спирали Архимеда. На валах в корпусе расположены противовесы и находящиеся в зацеплении шестерни. Корпус снабжен пружиной, взаимодействующей поочередно с закрепленными на спинке ножа упорами. Режущий аппарат состоит из верхнего и нижнего ножей. Верхний нож со стороны привода имеет вертикальную ось с подшипником, поочередно взаимодействующим с кулачками. Начала спиральных участков профилей кулачков расположены на проходящей через центры их вращения осевой линии. Кулачки развернуты вокруг осевой линии относительно друг друга на 180o. Ножевые полотна размещены между верхней и нижней накладками. Такое выполнение привода обеспечивает перемещение ножа с постоянной скоростью, что повышает надежность процесса резания и увеличивает долговечность конструкции. 4 ил.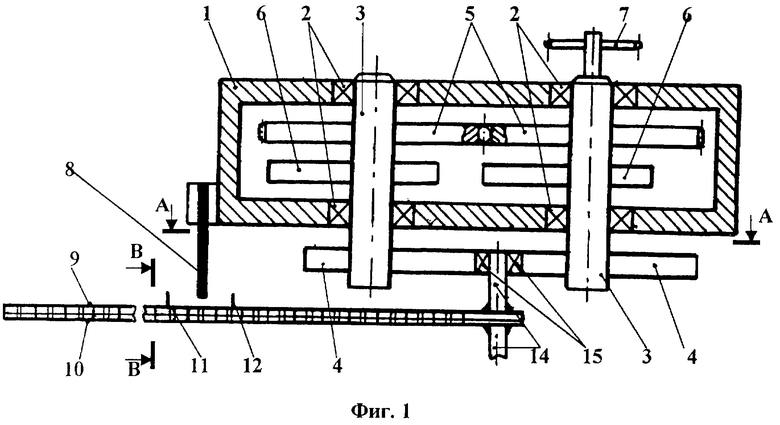
Привод режущего аппарата, содержащий корпус, жестко закрепленный на жатке и имеющий два консольных вала, установленных с возможностью вращения в противоположных направлениях с одинаковой угловой скоростью посредством зубчатого зацепления, и режущий нож, установленный в направляющих пальцевого бруса, отличающийся тем, что он снабжен кулачками и пружиной, а нож имеет упоры и вертикальную ось с закрепленным на ней подшипником, причем кулачки задают закон движения ножу и закреплены на консольных валах, установленных вертикально, подшипник размещен между кулачками с возможностью поперечного контактирования с ними, а пружина закреплена на корпусе с возможностью взаимодействия с упорами, при этом профили кулачков в пределах от 0 до (π-α) выполнены по спирали Архимеда и установлены на валах в одной плоскости так, что начала спиральных участков профилей кулачков расположены на осевой линии, проходящей через центры их вращения, а сами кулачки развернуты вокруг осевой линии относительно друг друга на 180o, причем угол α, дополняющий угол спирали до угла π, равен
α=π•в/2S,
где S - ход ножа в одну сторону;
в - ширина сегмента ножа или вкладыша пальца в его узкой части.
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 1991 |
|
RU2032306C1 |
| Привод ножа режущего аппарата | 1986 |
|
SU1438649A1 |
| Привод режущего аппарата | 1982 |
|
SU1061746A1 |
| Привод режущего аппарата | 1977 |
|
SU782743A1 |
| МЕХАНИЗМ ПРИВОДА ОДНО- ИЛИ ДВУХНОЖЕВОГО РЕЖУЩЕГО АППАРАТА КОСИЛОЧНОГО ТИПА | 0 |
|
SU297145A1 |
| US 4866921 А, 19.09.1989. | |||

