(54) ПРИВОД РЕЖУЩЕГО АППАРАТА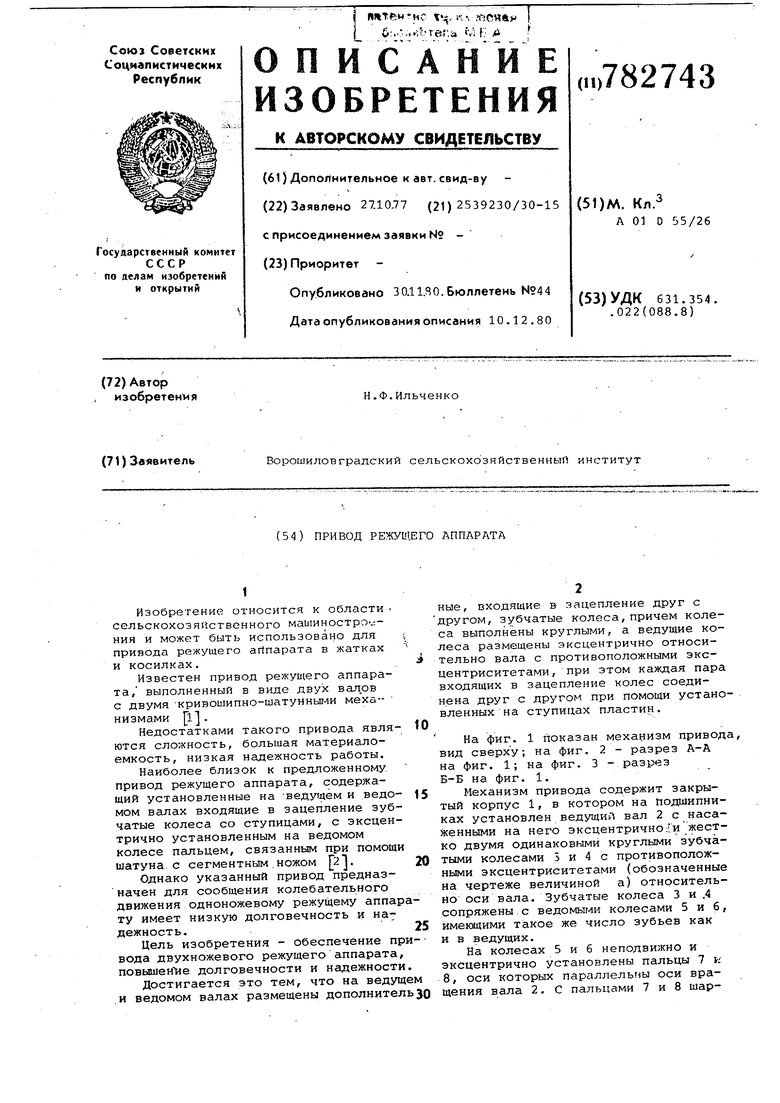
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 1991 |
|
RU2032306C1 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| Зубчатая передача | 1979 |
|
SU868192A1 |
| Механизм возвратно-поступательного движения | 1991 |
|
SU1825925A1 |
| РЕЖУЩИЙ АППАРАТ ДЛЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2013 |
|
RU2626946C2 |
| Планетарная зубчатая бесступенчатая передача | 1941 |
|
SU62597A1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 1999 |
|
RU2156900C1 |
| Механизм возвратно-поступательного движения | 1979 |
|
SU861796A1 |
| Привод двухножевого режущего аппарата уборочной машины | 1987 |
|
SU1496680A1 |
| Шарнир манипулятора | 1987 |
|
SU1733233A1 |
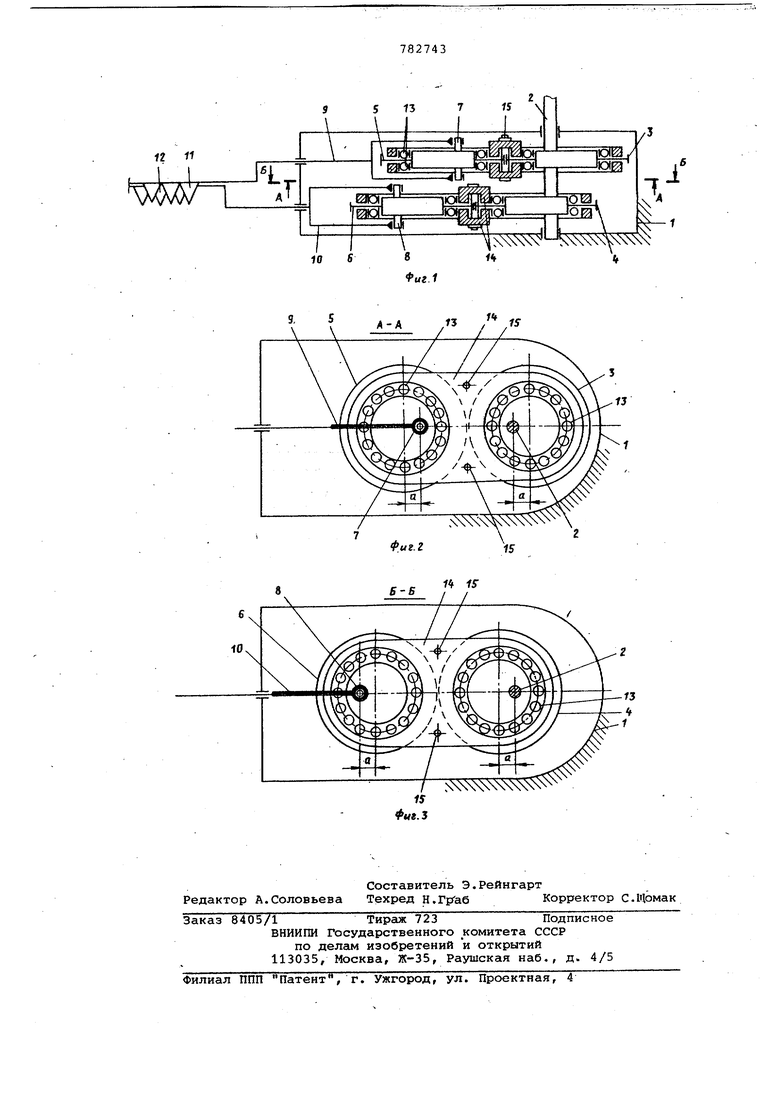
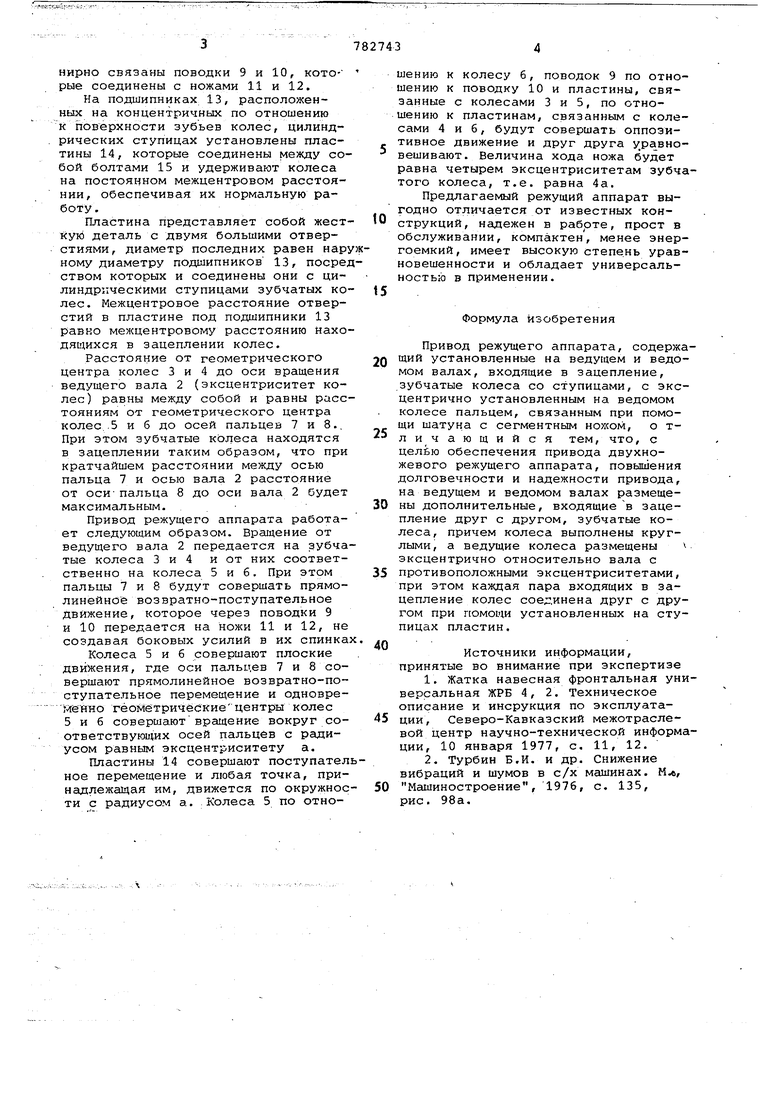
Изобретение относится к области сельскохозяйственного машиностро-.--ния и может быть использовано для привода режущего айпарата в жатках и косилках. Известен привод режущего аппарата/ выполненный в виде двух валов с двумя кривошипно-шатунны1ии механизмами р. . Недостатками такого привода являются сложность, большая материалоемкость, низкая надежность работы. Наиболее близок к предложенному привод режущего аппарата, содержащий установленные на -ведущем и ведоMOM валах входящие в зацепление зубчатые колеса со ступицами, с эксцентрично установленным на ведомом колесе пальцем, связанным при помощ шатуна с сегментным . ножом pj. Однако указанный привод предназначен для сообщения колебательного движения одноножевому режущему аппар ту имеет низкую долговечность и на-: дежность. Цель изобретения - обеспечение п вода двухножевого режущего аппарата noBbiueHVie долговечности и надежност Достигается это тем, что на ведущ и ведомом валах размещены дополните ные, входящие в зацепление друг с другом, зубчатые колеса,причем колеса выполнены круглыми, а ведущие колеса размещены эксцентрично относительно вала с противоположными эксцентриситетами , при этом каждая пара входящих в зацепление колес соединена друг с другом при помощи установленных на ступицах пластин. На фиг. 1 показан механизм привода, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Механизм привода содержит закрытый корпус 1, в котором на подшипниках установлен ведущий вал 2 с насаЯсенными на него эксцентрично:(и жестко двумя одинаковыми круглыми зубчатыми колесами 5 и 4 с противоположными эксцентриситетами (обозначенные на чертеже величиной а) относительно оси вала. Зубчатые колеса 3 и .4 сопряжены с ведомыми колесами 5 и 6, имеющими такое же число зубьев как и в ведущих. На колесах 5 и 6 неподвижно и эксцентрично установлены пальцы 7 и .8, оси которых параллельны оси вращения вала 2, С пальцами 7 и 8 шарнирно связаны поводки 9 и 10, которые соединены с ножами 11 и 12,
На подшипниках 13, расположенных на концентричных по отношению к поверхности зубьев колес, цилиндрических ступицах установлены пластины 14, которые соединены между собой болтами 15 и удерживают колеса на постоянном межцентровом расстоянии, обеспечивая их нормальную работу .
Пластина представляет собой жесткую деталь с двумя большими отверстиями, диаметр последних равен нарному диаметру подшипников 13, посреством которых и соединены они с цилиндрическими ступицами зубчатых колес. Межцентровое расстояние отверстий в пластине под подшипники 13 равно межцентровому расстоянию находящихся в зацеплении колес.
Расстояние от геометрического центра колес 3 и 4 до оси вращения ведущего вала 2 (эксцентриситет колес) равны между собой и равны расстояниям от геометрического центра колес..5 и б до осей пальцев 7 и 8., При этом зубчатые колеса находятся в зацеплении таким образом, что при кратчайшем расстоянии между осью пальца 7 и осью вала 2 расстояние от оси-пальца 8 до оси вала 2 будет максимальным. ,
Привод режущего аппарата работает следующим образом. Вршдение от ведущего вала 2 передается на зубчатые колеса 3 и 4 и от них соответственно на колеса 5 и 6. При этом пальцы 7 и 8 будут совершать прямолинейное возвратно-поступательное движение, которое через поводки 9 и 10 передается на ножи 11 и 12, не создавая боковых усилий в их спинка
Колеса 5 и б совершают плоские движения, где оси пальцев 7 и 8 совершают прямолинейное возвратно-поступательное перемещение и одноврейейно геометрические центры колес 5 и б совершаютвращение вокруг соответствующих осей пальцев с радиусом равным эксцентриситету а.
Пластины 14 совершают поступателное перемещение и любая точка, принадлежащая им, движется по окружности с радиусом а. Колеса 5 по отношению к колесу б, поводок 9 по отношению к поводку 10 и пластины, связанные с колесами 3 и 5, по отношению к пластинам, связанным с колесами 4 и 6, будут совершать оппози- тинное движение и друг друга у равновешивают. Величина хода ножа будет равна четырем эксцентриситетам зубчатого колеса, т.е. равна 4а.
Предлагаемый режущий аппарат выгодно отличается от известных конструкций, надежен в рабрте, прост в обслуживании, компактен, менее энергоемкий, имеет высокую степе.нь уравновешенности и обладает универсальностью в применении.
Формула изобретения
Привод режущего аппарата, содержаQ щий установленные на ведущем и ведомом валах, входящие в зацепление, .зубчатые колеса со ступицами, с эксцентрично установленным на ведомом колесе пальцем, связанным при помощи шатуна с сегментным ножом, о тличающийся тем, что, с целйю обеспечения привода двухножевого режущего аппарата, повышения долговечности и надежности привода, на ведущем и ведомом валах размещены дополнительные, входящие в зацепление друг с другом, зубчатые колеса, причем колеса выполнены круглыми, а ведущие колеса размещены эксцентрично относительно вала с 5 противоположными эксцентриситетами, при этом каждая пара входящих в зацепление колес сое;:.инена друг с другом при гсомощи установленных на ступицах пластин.
Источники информации,
принятые во вниманиепри экспертизе
0 Машиностроение, 1976, с. 135, рис. 98а.
