Заявляемые варианты системы автоматического пуска могут быть использованы в области электроэнергетики для выполнения разгона ротора энергетического турбоагрегата, содержащего газовую турбину и синхронный генератор со статической или бесщеточной системой возбуждения. Синхронному приводу ротора турбоагрегата, если не предпринимать никаких мер стабилизации, присуща структурная колебательная неустойчивость замкнутого контура, образованного динамическими звеньями угла нагрузки генератора и частоты вращения ротора, как содержащего два интегрирующих звена, включенных последовательно и охваченных обратной связью по сигналу частоты вращения ротора. Для устранения колебаний режимных параметров агрегата требуется введение стабилизирующих связей. Предлагаемые средства стабилизации обеспечивают плавный пуск, без колебаний частоты вращения ротора и других режимных параметров.
Наиболее близкой к заявляемым вариантам системы является система пуска по патенту JP 10153102 "Метод пуска и устройство управления пуском газотурбогенератора", опубликованному 09.06.1998 г. В прототипе имеется газовая турбина, синхронный генератор со статической системой возбуждения, подключенный к частотному преобразователю со звеном постоянного тока (далее преобразователь частоты) с мощностью, достаточной для разгона ротора агрегата от нулевой скорости до скорости "самоходности" турбины. Управление пуском осуществляется путем изменения напряжения и частоты напряжения инвертора и регулированием тока возбуждения синхронного двигателя. Для стабилизации режимных параметров используется обратная связь по углу нагрузки.
К числу недостатков названного прототипа можно отнести следующие: в прототипе устранение колебаний режимных параметров синхронного двигателя осуществляется за счет отрицательной обратной связи по углу нагрузки. Такой способ стабилизации является трудно реализуемым вследствие необходимости измерения или вычисления угла нагрузки, либо недостаточным для обеспечения более надежной стабилизации.
Предлагаемые системы пуска газотурбогенератора позволят обеспечить стабилизацию угла нагрузки и других режимных параметров агрегата более простым или более надежным способом.
Сущность изобретения по пункту 1 Формулы поясняется примером конкретного выполнения системы, показанной на фиг.1, где
1 - устройство управления пуском;
2 - преобразователь частоты;
3 - датчик частоты вращения ротора;
4 - газовая турбина;
5 - турбогенератор;
6 - система возбуждения;
7 - блок производной частоты вращения ротора;
8 - блок вычисления угла нагрузки.
Техническим результатом заявляемого варианта изобретения является обеспечение стабилизации режимных параметров системы пуска путем введения обратной связи по производной частоты вращения ротора, подключаемой к устройству управления пуском предлагаемой структуры. Технический результат достигается тем, что в систему автоматического пуска газотурбогенератора, содержащую газовую турбину 4, преимущественно одновальную, турбогенератор 5, работающий в режиме синхронного двигателя, устройство управления пуском 1, преобразователь частоты 2, систему возбуждения 6, датчик частоты вращения 3, причем первый выход устройства управления пуском 1 подключен к преобразователю частоты 2, выход которого подсоединен к выводам обмотки статора турбогенератора 5; второй выход устройства управления пуском 1 подключен к управляющему входу системы возбуждения 6, выход которой подключен к обмотке возбуждения генератора 5; датчик частоты вращения 3 соединен с первым входом устройства управления пуском 1, дополнительно включен блок производной частоты вращения 7 ротора, вход которого подключен к датчику частоты вращения, а выход - к второму входу устройства управления пуском 1. При этом устройство управления пуском содержит задатчик частоты напряжения и задатчик возбуждения синхронного двигателя, сумматор, формирователи сигналов задания частоты и возбуждения, причем входы задатчиков частоты и возбуждения соединены с первым входом устройства управления пуском, выход задатчика частоты подключен к положительному входу сумматора, первый отрицательный вход сумматора соединен с вторым, а второй отрицательный вход - с третьим входом устройства управления пуском, выход сумматора подключен через формирователь сигналов задания частоты к первому выходу устройства управления пуском, а к второму выходу устройства управления пуском подключен, через формирователь сигналов задания возбуждения, выход задатчика возбуждения.
Система пуска работает следующим образом. Перед пуском агрегата все составные элементы системы пуска приводятся в состояние готовности к пуску. Далее по команде оператора запускается устройство управления пуском 1. Начинается разгон ротора от синхронного двигателя до скорости "зажигания" турбины по программе, учитывающей фактическое изменение частоты вращения ротора. Преобразователь частоты 2 изменяет напряжение и частоту напряжения статора двигателя пропорционально заданию частоты от устройства управления 1. Одновременно происходит автоматическая коррекция тока возбуждения двигателя через систему возбуждения 6.
В момент "зажигания" турбины, когда турбина начинает создавать крутящий момент, разгон осуществляется под действием суммарного момента, создаваемого турбиной и двигателем. При достижении скорости ротора, при которой наступает режим самоходности турбины, автоматически гасится возбуждение двигателя и одновременно отключается питание двигателя от преобразователя частоты. Газовая турбина самостоятельно выходит на заданную подсинхронную скорость, при которой в дальнейшем будет осуществлен пуск возбуждения синхронного генератора и выход турбоагрегата на режим холостого хода. Все необходимые технологические команды на включение и отключение исполнительного оборудования формируются устройством управления пуском 1.
Блок производной частоты 7 реализует реальное дифференцирование сигнала частоты вращения ротора агрегата в соответствии с передаточной функцией
K1•p/1+T1•p,
где р - оператор дифференцирования,
K1 - весовой коэффициент при производной частоты вращения,
T1 - постоянная времени запаздывания.
Сигнал с блока 7 действует во время пуска постоянно и является сигналом отрицательной обратной связи относительно программного задания частоты. Параметры K1, T1 блока 7 определяются расчетным путем и корректируются при настройке системы пуска.
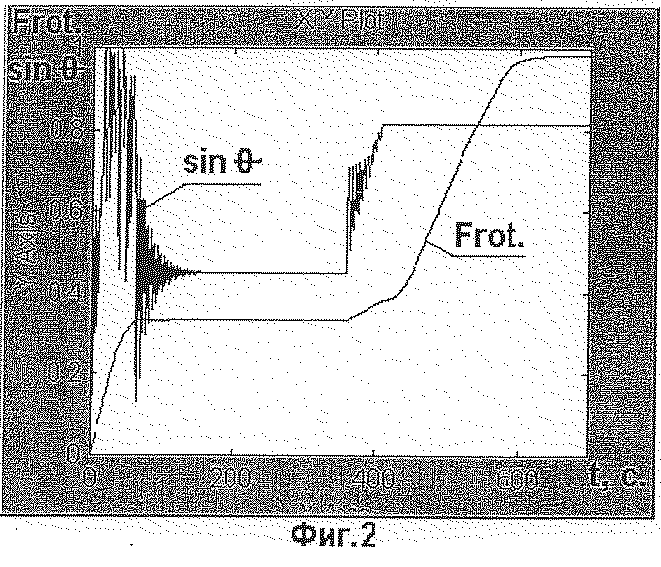
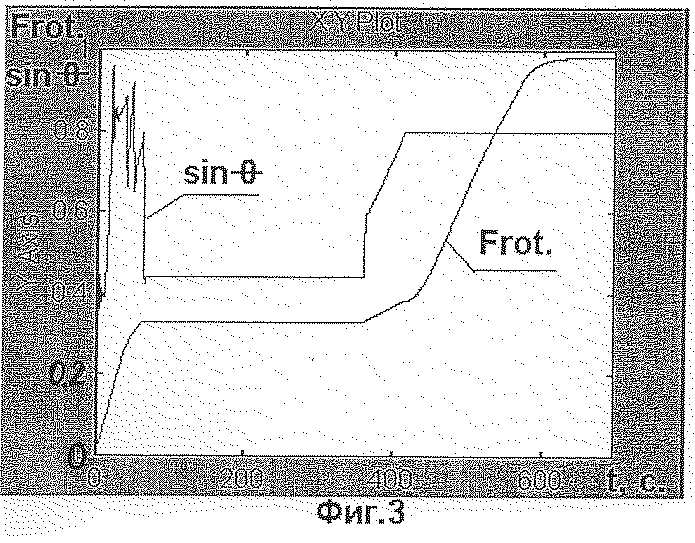
На фиг.2 и 3 показаны временные характеристики разгона ротора агрегата и изменения угла нагрузки синхронного двигателя в процессе пуска. На фиг.2 и 3 обозначены:
Frot. - частота вращения ротора агрегата;
sin θ - синус угла нагрузки синхронного двигателя;
t - реальное время пуска (с).
На фиг.2 показаны процессы при слабой стабилизирующей связи по производной частоты ротора. Передаточная функция связи в этом случае: K1•p/1+T1•p. На фиг.3 введена стабилизирующая связь с передаточной функцией: K2•p/1+Т2•p, причем K2= 20K1, T1= T2. Из сопоставления процессов видно, что во втором случае колебательность процессов резко сокращается. При отсутствии стабилизирующей связи система может потерять устойчивость по условию превышения углом нагрузки 90 эл. градусов.
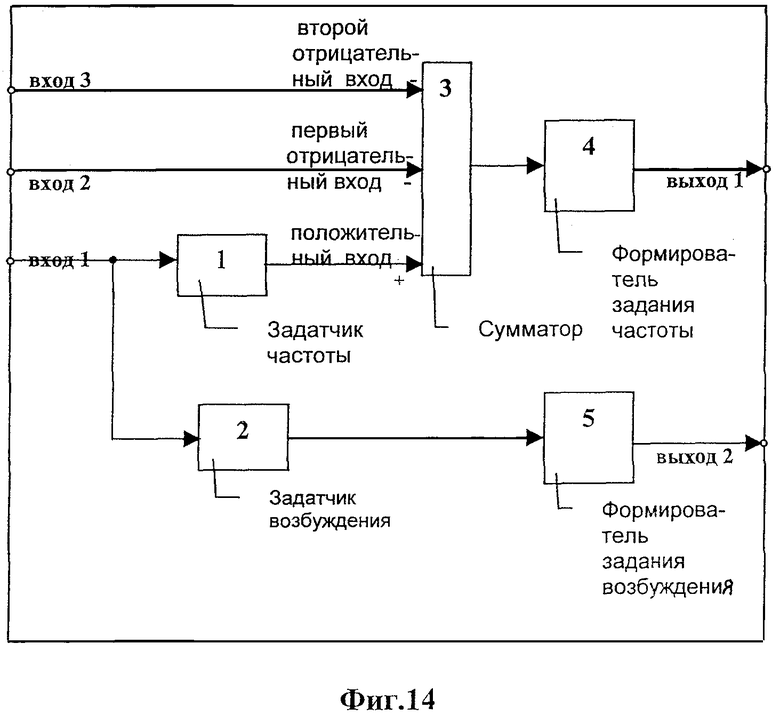
Пример конкретного выполнения устройства управления пуском для всех заявляемых вариантов показан на фиг.14, где
1 - задатчик частоты напряжения статора синхронного двигателя;
2 - задатчик возбуждения синхронного двигателя;
3 - сумматор;
4 - формирователь сигналов задания частоты;
5 - формирователь сигналов задания возбуждения.
Задатчик частоты 1 формирует программное задание в функции времени с учетом достигнутой частоты вращения ротора, информация о которой поступает на задатчик с первого входа устройства управления пуском. Задатчик возбуждения 2 формирует программное задание в функции частоты вращения ротора, информация о которой поступает на задатчик с первого входа устройства управления пуском, и через формирователь сигналов задания возбуждения 5 посылает его на второй выход устройства управления пуском. Выход задатчика частоты соединяется с положительным входом сумматора 3, на первый и второй отрицательные входы которого подаются сигналы стабилизации системы пуска, причем первый отрицательный вход сумматора соединен с вторым, а второй отрицательный вход - с третьим входом устройства управления пуском. Выход сумматора через формирователь сигналов задания частоты 4 подключается к первому выходу устройства управления пуском, сигналы с которого подаются на вход преобразователя частоты. Кроме названных функций, устройство управления пуском обеспечивает получение информации и команд от системы управления станцией, формирует команды управления исполнительным механизмам системы пуска газотурбогенератора и получает ответные подтверждения об их исполнении.
Способ стабилизации по производной частоты вращения ротора (способ по пункту 1 Формулы) является более простым для реализации, чем способ, указанный в прототипе, особенно при наличии в пусковом устройстве сигнала от датчика частоты вращения ротора.
Для улучшения качества и повышения надежности стабилизации режимных параметров в систему автоматического пуска газотурбогенератора может быть дополнительно введен блок вычисления угла нагрузки 8 (пункт 2 Формулы, фиг.1), включенный параллельно блоку производной частоты вращения ротора, причем вход блока вычисления угла нагрузки 8 подсоединен к выходу датчика частоты вращения 3 ротора, а выход блока подключен к третьему входу устройства управления пуском 1.
В этом случае система пуска работает аналогично системе, рассмотренной по пункту 1 Формулы, за исключением дополнительной стабилизирующей связи по углу нагрузки. Блок вычисления угла нагрузки реализует расчет угла нагрузки как интеграл по времени от разности задаваемой частоты напряжения статора и частоты вращения ротора агрегата, взятый с определенным весовым коэффициентом, который рассчитывается и корректируется при настройке системы пуска. В блоке реализуется функция
K0•(Fst.-Frot.)/p,
где К0 - весовой коэффициент обратной связи по углу нагрузки,
Fst. - частота напряжения статора синхронного двигателя,
Frot. - частота вращения ротора агрегата,
р - оператор дифференцирования.
Действия стабилизирующих отрицательных обратных связей по производной частоты вращения ротора и углу нагрузки суммируются и дают положительный эффект не только по улучшению стабилизации режимных параметров, но и с точки зрения повышения надежности функционирования цепей стабилизации: при отказе одной из стабилизирующих связей стабилизация режима пуска сохраняется.
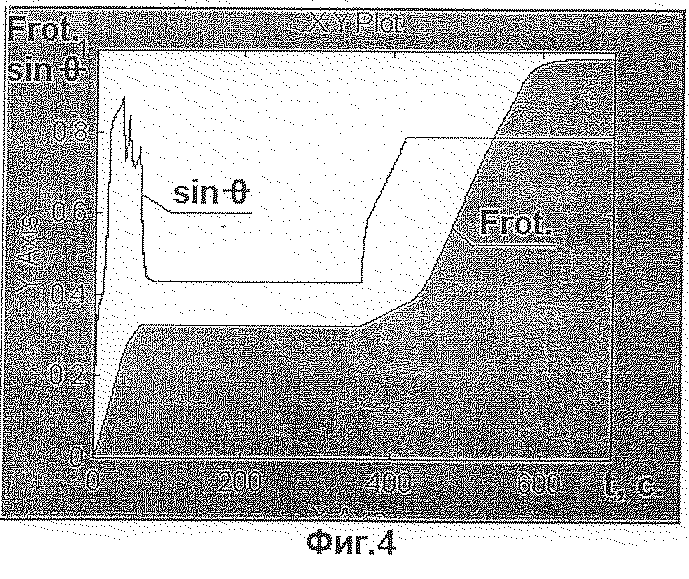
На фиг. 4 показаны временные характеристики разгона ротора агрегата и изменения угла нагрузки синхронного двигателя в процессе пуска при совместном действии стабилизирующих связей по производной частоты вращения ротора и углу нагрузки. Из графика видно, что процессы в системе стабилизированы лучше, чем в предыдущем случае; синус угла нагрузки изменяется в соответствии с заданием от устройства управления пуском 1, частота вращения ротора изменяется плавно, без колебаний по заданной программе пуска.
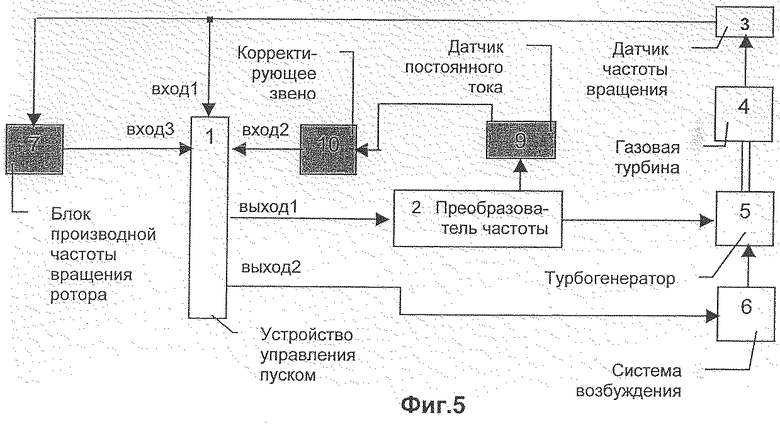
Сущность изобретения по пункту 3 Формулы поясняется примером конкретного выполнения системы, показанной на фиг.5, где 1 - устройство управления пуском; 2 - преобразователь частоты; 3 - датчик частоты вращения; 4 - газовая турбина; 5 - турбогенератор; 6 - система возбуждения; 9 - датчик постоянного тока преобразователя частоты; 10 - корректирующее звено обратной связи по постоянному току преобразователя частоты.
Техническим результатом заявляемого варианта изобретения является обеспечение стабилизации режимных параметров системы пуска путем введения отрицательной обратной связи по постоянному току преобразователя частоты, подключаемой к устройству управления пуском предлагаемой структуры. Технический результат достигается тем, что в систему автоматического пуска газотурбогенератора, содержащую газовую турбину 4; преимущественно одновальную, турбогенератор 5, работающий в режиме синхронного двигателя, устройство управления пуском 1, преобразователь частоты 2 со звеном постоянного тока, систему возбуждения 6, датчик частоты вращения 3, причем первый выход устройства управления пуском 1 подключен к преобразователю частоты 2, выход которого подсоединен к выводам обмотки статора турбогенератора 5; второй выход устройства управления пуском 1 подключен к управляющему входу системы возбуждения 6, выход которой подключен к обмотке возбуждения генератора 5; датчик частоты вращения 3 соединен с первым входом устройства управления пуском 1, дополнительно включен датчик постоянного тока преобразователя частоты 9, который через корректирующее звено 10 подключен к второму входу устройства управления пуском 1. При этом устройство управления пуском содержит задатчик частоты напряжения и задатчик возбуждения синхронного двигателя, сумматор, формирователи сигналов задания частоты и возбуждения, причем входы задатчиков частоты и возбуждения соединены с первым входом устройства управления пуском, выход задатчика частоты подключен к положительному входу сумматора, первый отрицательный вход которого соединен с вторым, а второй отрицательный вход - с третьим входом устройства управления пуском, выход сумматора подключен через формирователь сигналов задания частоты к первому выходу устройства управления пуском, а к второму выходу устройства управления пуском подключен через формирователь сигналов задания возбуждения выход задатчика возбуждения. Пример конкретного выполнения устройства управления пуском показан на фиг.14, а его работа описана ранее.
Система пуска работает аналогично системе, рассмотренной по пункту 1 Формулы, за исключением действия стабилизирующей связи по постоянному току преобразователя частоты. Датчик включается в цепь звена постоянного тока частотного преобразователя и выдает сигнал, пропорциональный активному току статора синхронного двигателя. Корректирующее звено 10 реализует передаточную функцию
К3/1+Т3•р,
где р - оператор дифференцирования;
К3 - весовой коэффициент обратной связи по току статора;
Т3 - постоянная времени запаздывания апериодического звена.
Параметры К3, Т3 блока 10 определяются расчетным путем и корректируются при настройке системы пуска. Сигнал с блока 10 является сигналом жесткой отрицательной замедленной обратной связи по постоянному току преобразователя частоты или, фактически, по активному току статора синхронного двигателя.
Для улучшения качества и повышения надежности стабилизации режимных параметров в систему автоматического пуска газотурбогенератора по пункту 3 может быть дополнительно введен блок производной частоты вращения ротора 7 (пункт 6 Формулы, фиг.5), вход которого подключен к выходу датчика частоты вращения 3, а выход подсоединен к третьему входу устройства управления пуском 1.
Система пуска работает аналогично системе по пункту 3 Формулы с суммированием действия от стабилизирующей отрицательной обратной связи по производной частоты ротора по пункту 1 Формулы.
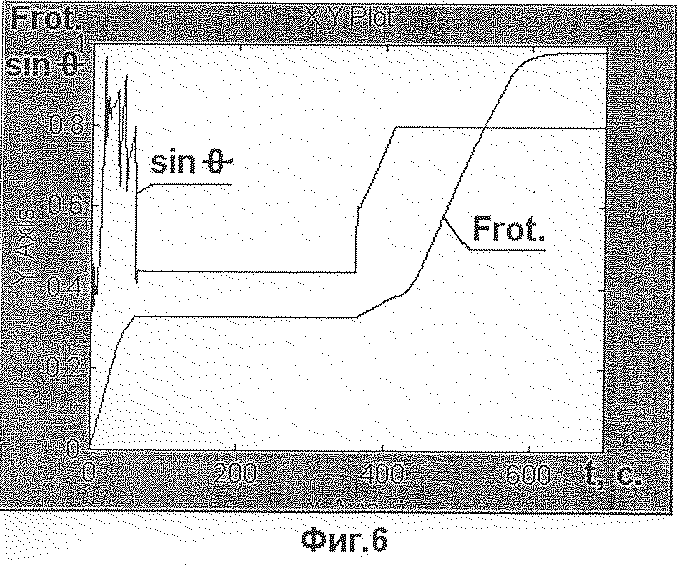
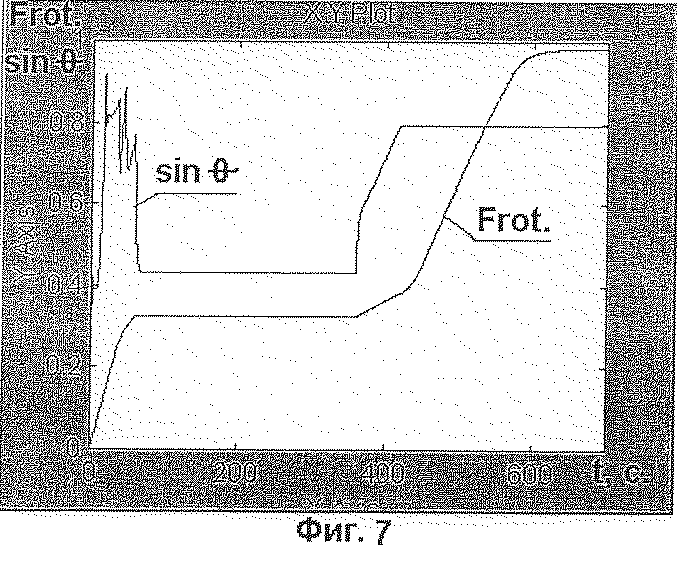
На фиг.6 и 7 показаны временные характеристики разгона ротора агрегата и изменения угла нагрузки синхронного двигателя в процессе пуска. На фиг.6 и 7 обозначены: Frot. - частота вращения ротора агрегата; sin θ - синус угла нагрузки синхронного двигателя; t - реальное время пуска (с). На фиг.6 приведены процессы при действии стабилизирующей обратной связи по постоянному току преобразователя частоты, а на фиг.7 - при совместном действии обратной связи по току преобразователя частоты и по производной частоты вращения ротора.
Из графиков фиг. 6 и фиг.3 видно, что каждая из примененных стабилизирующих связей обеспечивает стабилизацию режимных параметров системы пуска, что обеспечивается и при совместном действии указанных связей (фиг.7). Однако режим совместного действия двух стабилизирующих связей предпочтительнее как вследствие улучшения процесса стабилизации, так и с точки зрения повышения надежности функционирования цепей стабилизации: при отказе одной из стабилизирующих связей стабилизация режима пуска сохраняется.
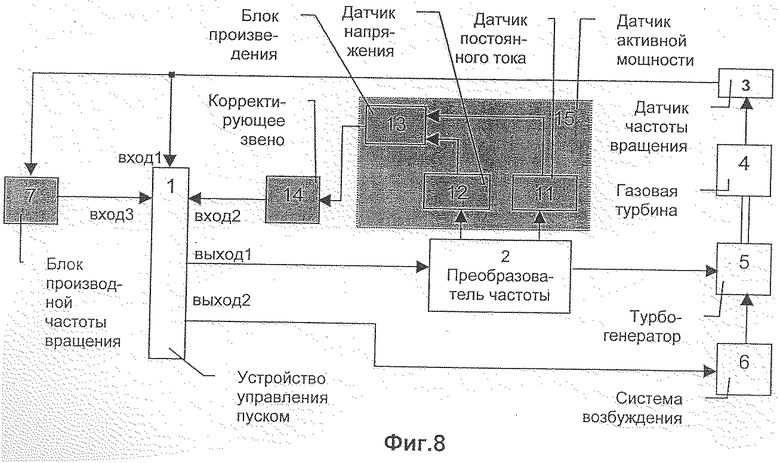
Сущность изобретения по пункту 4 Формулы поясняется примером конкретного выполнения системы, показанной на фиг.8, где 1 - устройство управления пуском; 2 - преобразователь частоты; 3 - датчик частоты вращения; 4 - газовая турбина; 5 - турбогенератор; 6 - система возбуждения; 11 - датчик постоянного тока преобразователя частоты; 12 - датчик напряжения преобразователя частоты; 13 - блок произведения; 14 - корректирующее звено обратной связи по мощности преобразователя частоты; 15 - датчик активной мощности преобразователя частоты.
Техническим результатом заявляемого варианта изобретения является обеспечение стабилизации режимных параметров системы пуска путем введения отрицательной обратной связи по активной мощности преобразователя частоты, подключаемой к устройству управления пуском предлагаемой структуры. Технический результат достигается тем, что в систему автоматического пуска газотурбогенератора, содержащую газовую турбину 4, преимущественно одновальную, турбогенератор 5, работающий в режиме синхронного двигателя, устройство управления пуском 1, преобразователь частоты 2 со звеном постоянного тока систему возбуждения 6, датчик частоты вращения 3, причем первый выход устройства управления пуском 1 подключен к преобразователю частоты 2, выход которого подсоединен к выводам обмотки статора турбогенератора 5; второй выход устройства управления пуском 1 подключен к управляющему входу системы возбуждения 6, выход которой подключен к обмотке возбуждения генератора 5; датчик частоты вращения 3 соединен с первым входом устройства управления пуском 1, дополнительно включены датчик постоянного тока 11 и датчик постоянного напряжения 12 преобразователя частоты, блок произведения 13 и блок корректирующего звена обратной связи по мощности 14 преобразователя частоты, причем выходы датчиков тока 11 и напряжения 12 подключены к входам блока произведения 13, выход которого соединен с входом корректирующего звена 14, а его выход подключен к второму входу устройства управления пуском 1. При этом устройство управления пуском содержит задатчик частоты напряжения и задатчик возбуждения синхронного двигателя, сумматор, формирователи сигналов задания частоты и возбуждения, причем входы задатчиков частоты и возбуждения соединены с первым входом устройства управления пуском, выход задатчика частоты подключен к положительному входу сумматора, первый отрицательный вход которого соединен с вторым, а второй отрицательный вход - с третьим входом устройства управления пуском, выход сумматора подключен через формирователь сигналов задания частоты к первому выходу устройства управления пуском, а к второму выходу устройства управления пуском подключен через формирователь сигналов задания возбуждения выход задатчика возбуждения. Пример конкретного выполнения устройства управления пуском показан на фиг.14, а его работа описана ранее.
Система пуска работает аналогично системе, рассмотренной по пункту 1 Формулы, за исключением действия стабилизирующей связи по мощности преобразователя частоты. Датчики тока 11 и напряжения 12 включаются в цепь звена постоянного тока частотного преобразователя и выдают сигналы, пропорциональные активному току и напряжению статора синхронного двигателя соответственно. В блоке произведения 13 эти сигналы перемножаются и их произведение подается на блок 14. Датчики 11, 12 и блок произведения 14 могут быть заменены на один датчик активной мощности 15 преобразователя частоты или измерительный преобразователь активной мощности синхронного двигателя (фиг.8). Корректирующее звено 14 реализует передаточную функцию
К4/1+Т4•p,
где р - оператор дифференцирования;
К4 - весовой коэффициент обратной связи по мощности инвертора;
Т4 - постоянная времени запаздывания апериодического звена.
Параметры К4, Т4 блока 14 определяются расчетным путем и корректируются при настройке системы пуска. Сигнал с блока 14 является сигналом жесткой отрицательной замедленной обратной связи по мощности постоянного тока преобразователя частоты или, фактически, по активной мощности статора синхронного двигателя.
Для улучшения качества и повышения надежности стабилизации режимных параметров в систему автоматического пуска газотурбогенератора по пункту 4 может быть дополнительно введен блок производной частоты вращения ротора 7 (пункт 6 Формулы, фиг.8), вход которого подключен к выходу датчика частоты вращения 3, а выход подсоединен к третьему входу устройства управления пуском 1.
Система пуска работает аналогично системе по пункту 4 Формулы с суммированием действия от стабилизирующей отрицательной обратной связи по производной частоты ротора по пункту 1 Формулы.
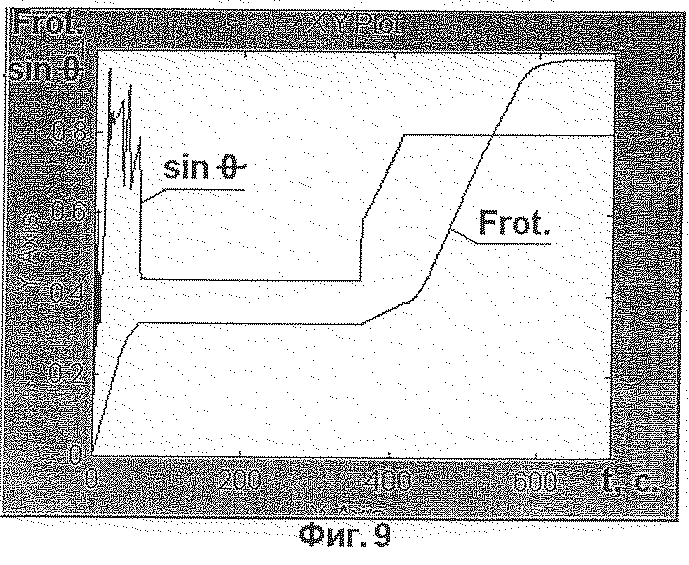
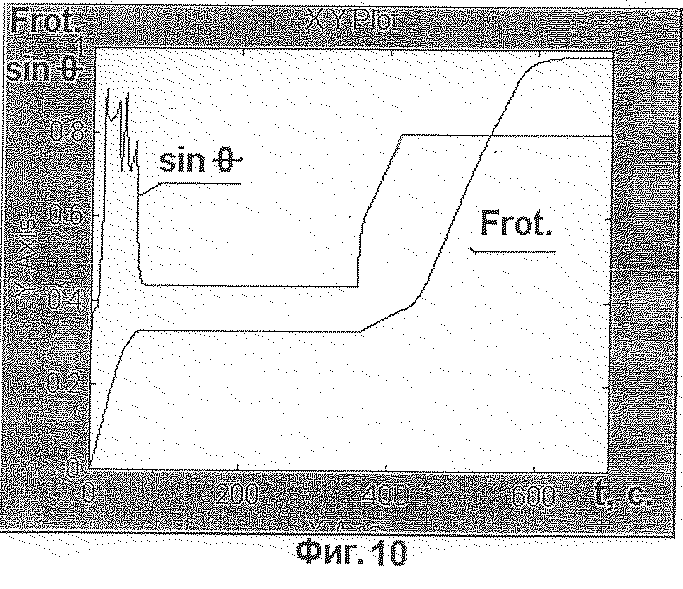
На фиг.9 и 10 показаны временные характеристики разгона ротора агрегата и изменения угла нагрузки синхронного двигателя в процессе пуска. На фигурах обозначены: Frot. - частота вращения ротора агрегата; sin θ - синус угла нагрузки синхронного двигателя; t - реальное время пуска (с). На фиг.9 приведены процессы при действии стабилизирующей обратной связи по активной мощности инвертора, а на фиг.10 - при совместном действии обратной связи по мощности инвертора и по производной частоты вращения ротора.
Из графиков фиг.9 и фиг.3 видно, что каждая из примененных стабилизирующих связей обеспечивает стабилизацию режимных параметров системы пуска, это обеспечивается и при совместном действии указанных связей (фиг.10). При этом режим совместного действия двух стабилизирующих связей предпочтительнее как вследствие улучшения процесса стабилизации, так и с точки зрения повышения надежности функционирования цепей стабилизации: при отказе одной из стабилизирующих связей стабилизация режима пуска сохраняется.
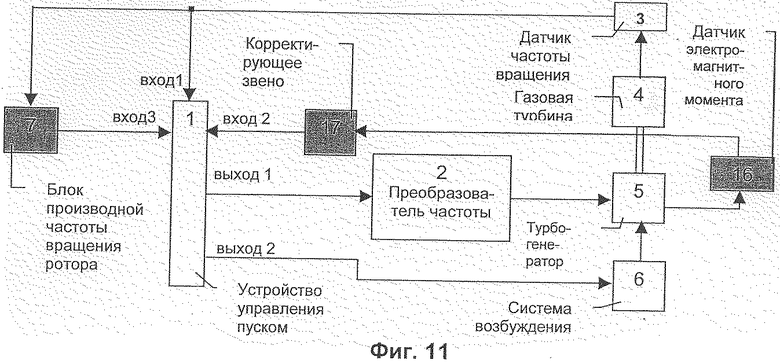
Сущность изобретения по пункту 5 Формулы поясняется примером конкретного выполнения системы, показанной на фиг.11, где 1 - устройство управления пуском; 2 - преобразователь частоты; 3 - датчик частоты вращения; 4 - газовая турбина; 5 - турбогенератор; 6 - система возбуждения; 7 - блок производной частоты вращения ротора; 16 - датчик электромагнитного момента; 17 - корректирующее звено обратной связи по электромагнитному моменту.
Техническим результатом заявляемого варианта изобретения является обеспечение стабилизации режимных параметров системы пуска путем введения отрицательной обратной связи по электромагнитному моменту синхронного двигателя, подключаемой к устройству управления пуском предлагаемой структуры. Технический результат достигается тем, что в систему автоматического пуска газотурбогенератора, содержащую газовую турбину 4, преимущественно одновальную, турбогенератор 5, работающий в режиме синхронного двигателя, устройство управления пуском 1, преобразователь частоты 2, систему возбуждения 6, датчик частоты вращения 3, причем первый выход устройства управления пуском 1 подключен к преобразователю частоты 2, выход которого подсоединен к выводам обмотки статора турбогенератора 5; второй выход устройства управления пуском 1 подключен к управляющему входу системы возбуждения 6, выход которой подключен к обмотке возбуждения генератора 5; датчик частоты вращения 3 соединен с первым входом устройства управления пуском 1, дополнительно включены последовательно соединенные датчик электромагнитного момента 16 двигателя и корректирующее звено обратной связи по электромагнитному моменту 17, причем выход датчика 16 подключен к входу корректирующего звена 17, выход которого соединен с вторым входом устройства управления пуском 1. При этом устройство управления пуском содержит задатчик частоты напряжения и задатчик возбуждения синхронного двигателя, сумматор, формирователи сигналов задания частоты и возбуждения, причем входы задатчиков частоты и возбуждения соединены с первым входом устройства управления пуском, выход задатчика частоты подключен к положительному входу сумматора, первый отрицательный вход которого соединен с вторым, а второй отрицательный вход - с третьим входом устройства управления пуском, выход сумматора подключен через формирователь сигналов задания частоты к первому выходу устройства управления пуском, а к второму выходу устройства управления пуском подключен через формирователь сигналов задания возбуждения выход задатчика возбуждения. Пример конкретного выполнения устройства управления пуском показан на фиг.14, а его работа описана ранее.
Система пуска работает аналогично системе, рассмотренной по пункту 1 Формулы, за исключением действия стабилизирующей связи по электромагнитному моменту синхронного двигателя. Датчик 16 выдает сигнал, пропорциональный электромагнитному моменту синхронного двигателя (фиг.11). Корректирующее звено 17 реализует передаточную функцию
К5/1+Т5•p,
где р - оператор дифференцирования;
К5 - весовой коэффициент обратной связи по электромагнитному моменту;
T5 - постоянная времени запаздывания апериодического звена.
Параметры K5, T5 блока 17 определяются расчетным путем и корректируются при настройке системы пуска. Сигнал с блока 17 является сигналом жесткой отрицательной замедленной обратной связи по электромагнитному моменту синхронного двигателя.
Для улучшения качества и повышения надежности стабилизации режимных параметров в систему автоматического пуска газотурбогенератора по пункту 5 может быть дополнительно введен блок 7 производной частоты вращения ротора (пункт 6 Формулы, фиг.11), вход которого подключен к выходу датчика частоты вращения 3, а выход подсоединен к третьему входу устройства управления пуском 1.
Система пуска работает аналогично системе по пункту 5 Формулы с суммированием действия от стабилизирующей отрицательной обратной связи по производной частоты ротора по пункту 1 Формулы.
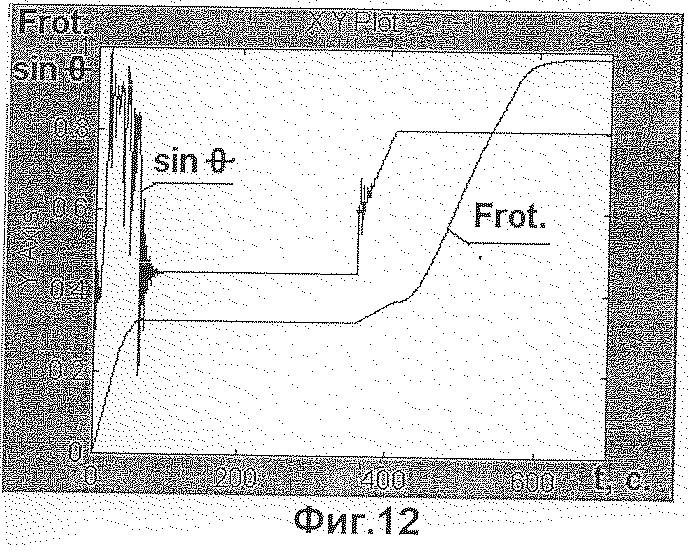
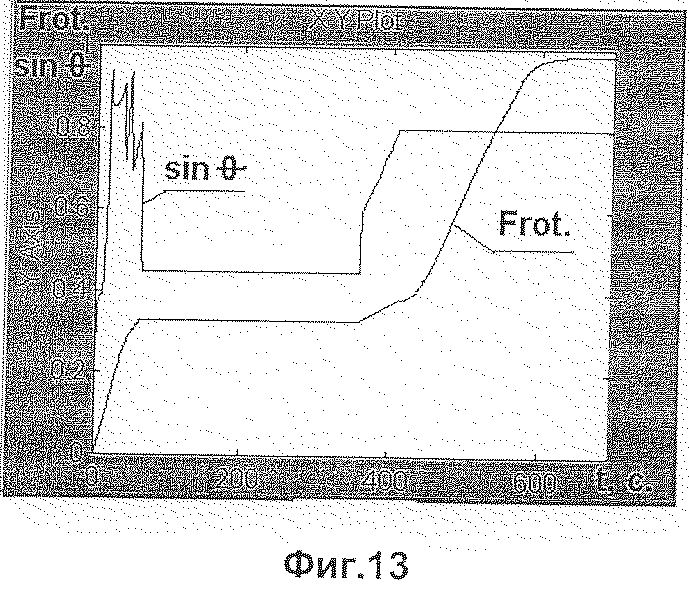
На фиг.12 и 13 показаны временные характеристики разгона ротора агрегата и изменения угла нагрузки синхронного двигателя в процессе пуска. На фиг.12 и 13 обозначены: Frot. - частота вращения ротора агрегата; sin θ - синус угла нагрузки синхронного двигателя; t - реальное время пуска (с). На фиг.12 приведены процессы при действии стабилизирующей обратной связи по моменту двигателя, а на фиг.13 - при совместном действии обратной связи по моменту двигателя и по производной частоты вращения ротора.
Из графиков фиг.12 и фиг.3 видно, что каждая из примененных стабилизирующих связей обеспечивает стабилизацию режимных параметров системы пуска, это обеспечивается и при совместном действии указанных связей (фиг.13). При этом режим совместного действия двух стабилизирующих связей предпочтительнее как вследствие улучшения процесса стабилизации, так и с точки зрения повышения надежности функционирования цепей стабилизации: при отказе одной из стабилизирующих связей стабилизация режима пуска сохраняется. Применение данного способа стабилизации целесообразно при наличии датчика электромагнитного момента.
Таким образом, нами показано, что благодаря применению в системе пуска предлагаемых стабилизирующих связей устраняется структурная колебательная неустойчивость, присущая нескорректированной системе синхронного электропривода турбоагрегата, обеспечивается стабилизация режимных параметров системы. Все предлагаемые системы пуска, обеспечивая требуемую стабилизацию режимных параметров, отличаются способами практической реализации. Выбор стабилизирующих связей обусловлен технической возможностью их реализации и техническими требованиями к системе пуска. Следует отметить целесообразность применения "совместных" стабилизирующих связей с целью улучшения качества стабилизации и повышения надежности функционирования системы. Предлагаемое устройство управления пуском обеспечивает функциональную полноту управления при заданной структуре системы пуска и отличается простотой реализации.
Все рассмотренные системы пуска и способы их стабилизации были аналитически исследованы, а результаты были подтверждены путем математического моделирования динамических систем с помощью пакета прикладных программ "MATLAB 5.3".
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| ПУСКОВОЕ УСТРОЙСТВО ОДНОВАЛЬНОГО ГАЗОТУРБИННОГО АГРЕГАТА | 2002 |
|
RU2216637C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2013 |
|
RU2522258C1 |
| СПОСОБ И УСТРОЙСТВО ПУСКА ГАЗОТУРБИННОГО АГРЕГАТА | 2003 |
|
RU2251625C1 |
| Способ пуска синхронной машины | 1990 |
|
SU1757073A1 |
| Автономная электростанция переменной частоты вращения | 2019 |
|
RU2735280C1 |
| Вентильный электродвигатель | 1979 |
|
SU904135A1 |
| Способ регулирования частоты вращения ротора вентильного электродвигателя | 1990 |
|
SU1721774A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ДЛЯ РЕГУЛЯТОРА СКОРОСТИ ГИДРОТУРБИНЫ | 2005 |
|
RU2292483C1 |
Группа изобретений относится к области электроэнергетики и может быть использована для автоматического разгона ротора энергетического турбоагрегата от генератора, работающего в режиме синхронного двигателя, и вывода газовой турбины на режим самоходности. Система пуска включает газовую турбину со своей системой управления, синхронный генератор со статической или бесщеточной системой возбуждения; частотный преобразователь, питающий генератор; устройство управления пуском и датчик частоты вращения ротора. Новым обстоятельством является то, что в систему введена одна из стабилизирующих отрицательных обратных связей: по производной частоты вращения ротора, по постоянному току преобразователя, по активной мощности или электромагнитному моменту двигателя. В каждую из обратных связей включены корректирующие звенья с настраиваемыми весовыми и динамическими характеристиками. Рекомендуется совместное использование каждой из указанных связей со связью по производной частоты вращения ротора как наиболее простой для реализации. Предлагается использовать также обратную связь по углу нагрузки совместно с производной частоты вращения ротора. Благодаря применению описываемых стабилизирующих связей устраняется структурная колебательная неустойчивость, присущая нескорректированной системе синхронного электропривода турбоагрегата, обеспечивается стабилизация режимных параметров системы. Каждая из связей в отдельности обеспечивает стабилизацию параметров, однако использование "совместных" связей наряду с улучшением качества стабилизации повышает надежность функционирования системы, так как при отказе одной из связей стабилизация режима работы системы сохраняется. 4 с. и 2 з.п. ф-лы, 14 ил.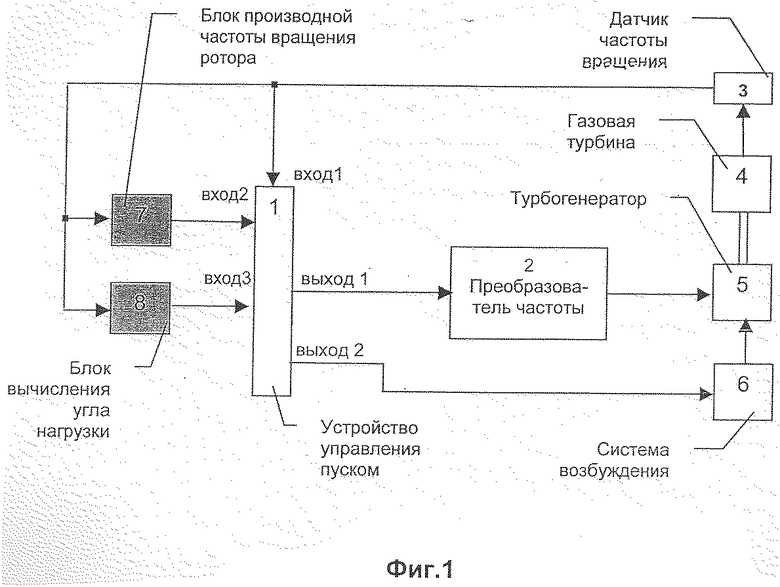
| JP 10153102 А, 09.06.1998 | |||
| US 4380146 А, 19.04.1983 | |||
| ЩЕТКА СТЕКЛООЧИСТИТЕЛЯ | 2007 |
|
RU2437782C2 |
| US 3793826 А, 26.02.1974 | |||
| Система запуска газотурбинной установки | 1969 |
|
SU341333A1 |
| Газотурбинная электроэнергетическая установка | 1989 |
|
SU1710801A1 |
| Устройство для запуска газотурбинного двигателя | 1980 |
|
SU926981A1 |

