Изобретение относится к электротехнике и мохет быть использовано для управления машинами переменного тока, преимущественно синхронными машинами с бесщеточным возбуждением.
Целью изобретения является улучшение качества электроэнергии потребителей и упрощение.
На фиг.1 приведены графики асинхронного момента и полного тока в якорной обмотке возбудителя; на фиг.2 - принципиальная схема устройства для управления бесшеточной синхронной машиной; на фиг.З - схега выполнения формирователя частоты; на фиг. 4 - фрагмент формирования частоты при его выполнении с дискретным управление -; на фиг. 5 - схема регулятора; на фиг. 6 - схема датчика положения ротора синхронной машины.
Способ управления бесщеточной синхронной машиной заключается в следующем.
По гармоническим сигналам датчиков положения ротора и напряжения статора синхронной машины формируют сигнал, пропорциональный углу о между какой либо осью ротора и вектором напряжения сети. При этом, например, реализуется известное тригонометрическое соотношение:
| arcsin(OOct-03pt)arc(sinCOct-cosCOpC- -cosCdjt sinWpt) ,(О
где СЗр и (О. - частоты напряжения сети
и вращения ротора; t, - время.
Этот сигнал сравнивают с уставкой DO угла и формируют, например, сигнал пропорционально-дифференциального регулирования по отношению
(Кв+К, )(Н W) где Kft,K4 - коэффициенты регулирования ;
О Ю
иёь
О
ел
ю
Uo CV По аналогии сигналу (2) формируют
по числу фаз обмотки возбуждения возбудителя гармонические сигналы еди ничной амплитуды с частотой
О ( | tf-Јe). (3)
Гармонические сигналы (3) образуют напряжения единичной амплитуды, определяемые соотношением
4
где ,
Сигнал управления, сформированный автоматическим регулятором возбуждения (это, например, обычный автоматический регулятор возбуждения сильного действия типа АРВ-СД) синхрон
U
ШЬ
суммируется с сиг
%Г%АР&+и (5) Далее сигнал (5) умножается на единичное напряжение (4) и формируются- сигналы напряжения возбуждения, например, для трех фаз а,Ь,с возбудителя
UfWJ и и Л5 со %ВГиЭД - (6 Эти напряжения (6) через систему импульсно-фазового управления подают- на на многофазный тиристорный преобразователь частоты, на выходе которого формируется напряжение возбуждения возбудителя. Многофазное (на- пример, 3-фазное} напряжение с выхода тиристорного преобразователя частоты подается на неподвижную многофазную обмотку возбуждения возбудителя, создавая гармонически изменяю- щееся с частотой (3} поле возбуждения , Эквивалентное напряжение возбуждения равно
VUi(aJ UЈ (ft)1 COS12°° иШ cos 20° 2U.tE COsY.
По известному соотношению это гармоническое напряжение может быть представлено как сумма прямого и сопряженного векторов напряжений:
2UJeJy2+ n Jr--Jir
U
Г
ров на Jf
(). (6)
Сопряженный вектор напряжения
создает вращающееся в соот ветствии с выражением (3) с двойной частотой по отношению к ротору (т.е. вращающееся против вращения ротора)
,
г
JQ
20
25
) 30 354045
50
55
поле возбуждения, по отношению к которому возбудитель находится в режиме так называемого протцвовключения с небольшим моментом на валу, который можно практически не учитывать.
Прямой вектор напряжения U,n ±5. е создает вращающееся с частотой (3) в сторону вращения ротора поле возбуждения. Это основное для предлагаемого способа поле, вращаясь относительно расположенной на роторе якорной обмотки возбудителя, подключенной через вращающийся вентильный выпрямитель к обмотке возбуждения синхронной машины, создает дополнительный момент вращения, определяемый соотношением
м- ....®Г-илМ-х Т11Аь
)GO ХД р ($ и т+а$Јр
П)
где (О - частота напряжения возбуждения , определяемая соотношением (3) , С0р - частота вращения ротора синх ронной машины; И, - модуль сигнала вектора напряжения возбуждения возбудителя (б );
- коэффициент магнитной связи между обмотками статора и ротора возбудителя; Т - постоянная времени якорной обмотки возбудителя с учетом активного сопротивления обмотки возбуждения синхронной машины;
R.+jX. - активное и индуктивное со - противление - обмотки возбуждения во з будителя; Т - переходная постоянная времени якорной обмотки возбудителя.
Момент, определяемый соотношением (7), в сущности является дополнительным асинхронным моментом, создаваемым дополнительным управлением величиной и частотой напряжения возбуждения возбудителя,
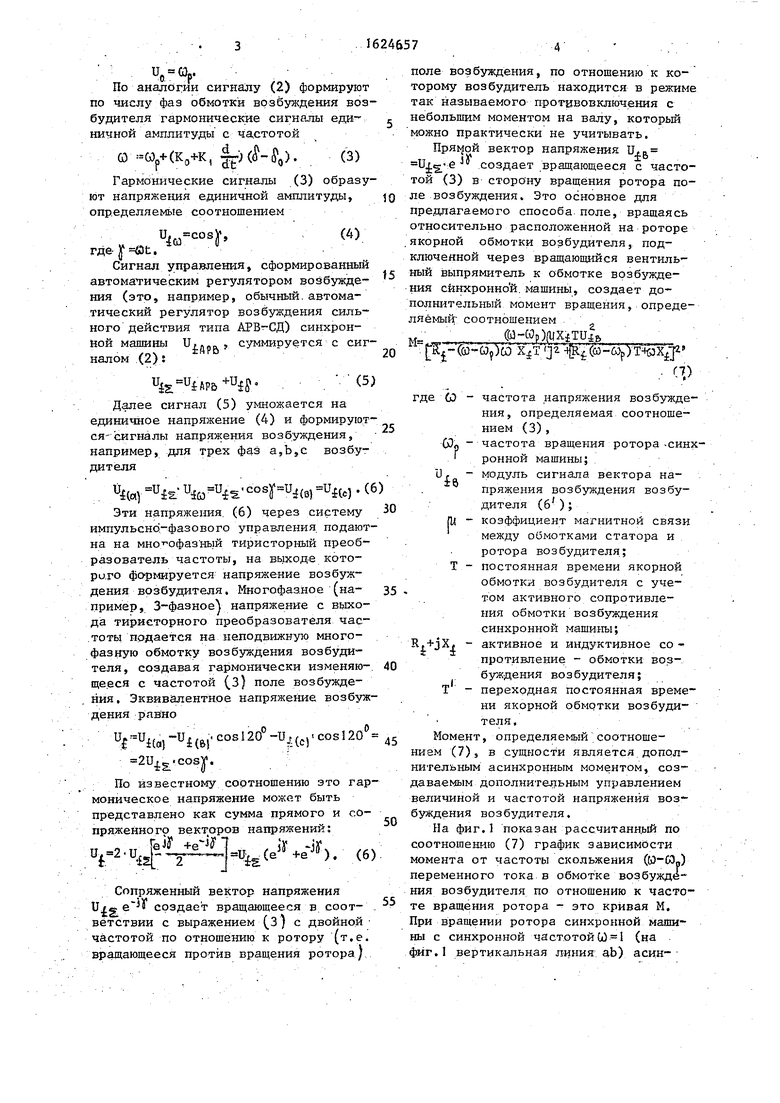
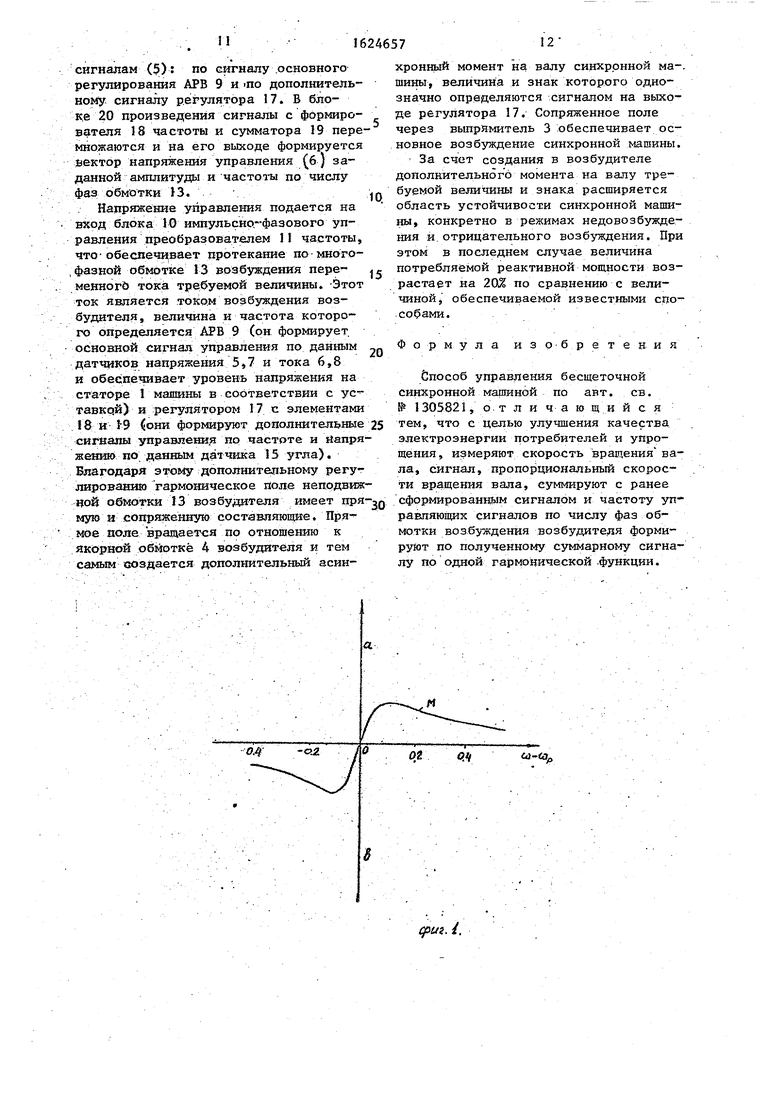
На фиг.1 показан рассчитанный по соотношению (7) график зависимости момента от частоты скольжения (й-ОЭр) переменного тока в обмотке возбуждения возбудителя по отношению к частоте вращения ротора - это кривая М. При вращении ротора синхронной машины с синхронной частотой (д} 1 (на фиг.1 вертикальная линия ab) асинIй
516
кронный момент, приложенный к валу машины при изменении частоты СО различен по величине и знаку. Если дополнительный регулирующий сигнал отрицательный, т.е. Д(У () О, то это значит, что ротор затормозился, поэтому к нему необходимо приложить положительный, т.е. двигательный асинхронный момент. Из графиков фиг,1 видно, что для этого в обмотке воз- буждения возбудителя должны быть токи с частотойСО ООр,
Если указанный сигнал положительный, т.е.ДоО, то это значит, что ротор синхронной машины разогнался по отношению к вектору напряжения сети, поэтому к ротору необходимо приложить отрицательный, т.е. генераторный момент. Из графиков фиг.1 видно, что для этого в обмотке возбуждения возбудителя должны быть токи с частотой СО
Wp.
Рассмотрим вопрос повышения устойчивости.
На вал синхронной машины действуют два момента - момент, развиваемый самой синхронной машиной, и момент (7), развиваемый возбудителем при предлагаемом способе регулирования
Тогда, приняв в (7) , уравнение движения синхронной машины при
мет вид
ТА UE«
+
Тф
Xf CD-fi)p)2T«+l (8)
То - механическая инерционная
постоянная ротора синхронной машины и возбудителя;
4- dt
U символ дифференцирования;
синхроннапряжение статора ной машины;
aicM з
я ЭДС синхронной машины;
X - индуктивное сопротивление статора синхронной машины. Как следует из (2) и (3), для -упрощения анализа в (8) можно принять
и|вхэ.
const C.
Тогда, учитывая (3), а также G)p 0С+Р°, где G)fi - синхронная частота напряжения статора синхронной машины, характеристическое уравнение
Очевидно, из (9) и (10), что при , К 0 синхронная машина устойчива во всех режимах, в том числе и при отрицательных углах о0 .
Изменяя в функции отклонения угла от задания плавно частоту и величину напряжения возбуждения возбудителя на валу синхронно) машины создается дополнительный момент требуемого знака и величины, что повышает
20
25
30
40
45
50
5
электромеханическую устойчивость синхронной машины. При этом дополнительное регулирование не мешает ос- новноку регулированию.
Регулирование дополнительного момента можно осуществлять не только плавно в соответствии с изменением частоты по отклонению угла от задания по соотношению (3), но и дискретно. Например, задаться тремя частотами: 1,05; 0; 0,95. При этом, если отклонение угла от уставкиД8 0, то частота задается 03 0, еслиД кО, то 60 s
1,05, еслий(0, той 0,95. Величина напряжения, соответственно, также меняется с изменением частоты. Очевидно, что дополнительный момент также меняется по знаку и величине дискретно (скачком). Длительность импульса момента определяется только соотношением До 0. Это можно сделать и с зоной нечувствительности, задав, например, при 0, при йЈ -а(о 1,05, прид# айэ 0,95.
Во всех рассмотренных случаях реализации способа происходит повышение устойчивости синхронной машины.
Способ управления бесщеточной синхронной машиной4 представляет собой следующую последовательность операций :
1.Дополнительно формируют сигнал скорости вращения вала.
2.Суммируют сигнал скорости вращения вала с результирующим (суммарным) сигналом, сформированным в основном изобретении,
3.Формируют частоту управляющих сигналов по числу фаз обмотки возбуждения возбудителя по одной тригонометрической функции.
При этом обмотку возбуждения возбудителя можно выполнить однофазной.
Таким образом, благодаря созданию на валу возбудителем дополнительного момента требуемой величины и знака расширяется область устойчивости синхронной машины, конкретно в режимах недовозбуждения и отрицательного возбуждения. В последнем случае величина потребляемой реактивной мощности возрастает на 20% по сравнению с величиной, обеспечиваемой известными способами.
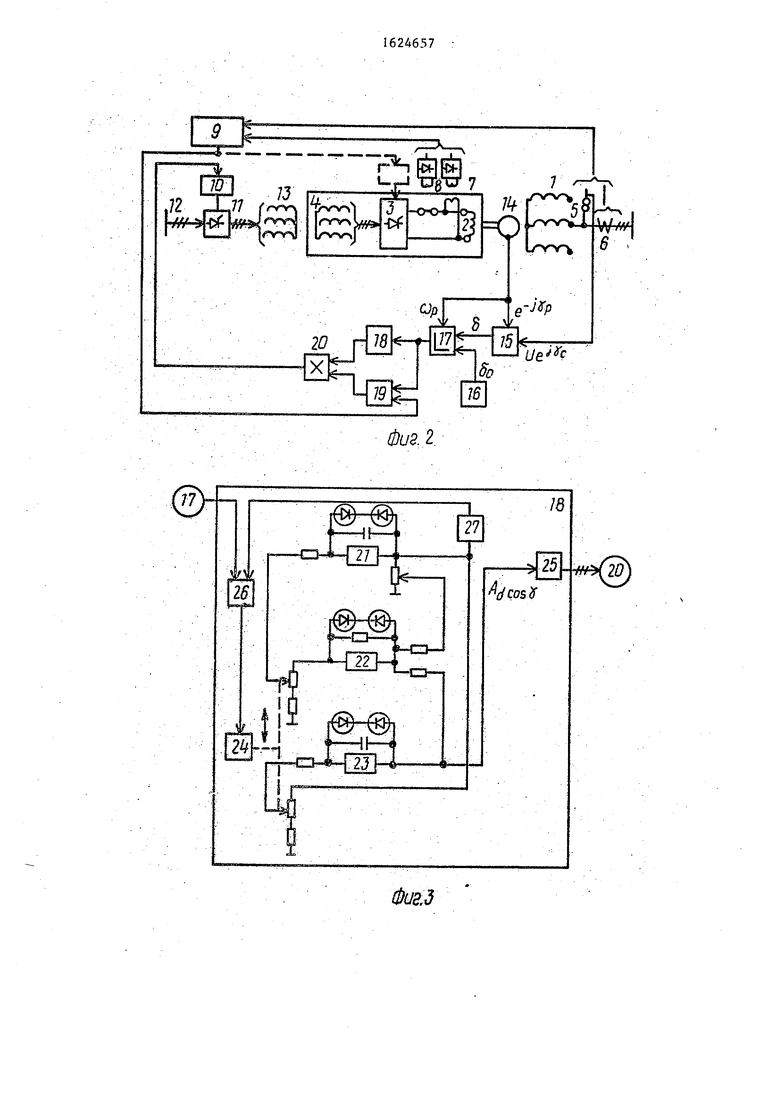
Рассмотренный способ может быть реализован при помощи устройства по фиг.2. Статорная обмотка 1 синхронной машины подсоет;иена к энергосистеме. На роторе машины размещена обмотка 2 возбуждения. Вращающийся выпрямитель 3 соединен с якорной обмоткой 4 переменного тока обращенного возбудителя. Трансформатор 5 напряжения и трансформатор 6 тока ста- торной обмотки 1, а. также бесконтактные датчики напряжения 7 и тока 8 обмотки возбуждения соединены с входами автоматического регулятора 9 возбуждения (АРВ). Выход блока 10 им- пульсно-фазового управления соединен через управляемый преобразователь 11 частоты, питание которого осуществляется от источника 12 возбуждения, с неподвижной многофазной обмоткой 13 возбуждения возбудителя. Выходы трансформатора 5 напряжения статора 1 и датчика 14 положения ротора синхронной машины соединены с входами датчика 15 угла, выход которого как и выход задатчика 16 угла и выход датчика 14 соединены с входами регулятора 17, выход которого соединен с входом формирователя 18 частоты и первым входом сумматора 1 второй вход которого соединен с выходом автоматического регулятора 9 возбуждения. Выводы формирователя 18 частоты сумматора 19 соединены с входами блока 20 произведения, выход которого соединен с входом блока 10 импульсно-фазового управления.
Задатчик 16 угла в простейшем случае представляет собой источник ста билизировакного напряжения с регули руемым потенциометром, с движка которого снимается сигнал задания по углу. Регулятор 17 угла - обычный про-
порционально-дифференциальный пегуля- тор на операционном усилителе.
Формирователь 18 частоты может быть выполнен на базе кварцевого генератора с делителем частоты или на базе генератора сигналов низкочастотного типа. В простейшем случае формирователь 18 частоты можно выполнить как колебательное звено второго по рядка.
В основу построения такого формирователя частоты взята модель, описываемая линейным дифференциальным уравнением второго порядка с постоянными коэффициентами:
d2X/dt2+W2X 0.(11)
Общий интеграл уравнения выражет- ся так:
20
25
30
35
40
45
50
55
sin
н
х„+х12/&Л
(12)
lnjf где А - амплитуда колебаний; X0() - отклонение; X () - скорость.
Очевидно, что математическая модель для решения уравнения (11) может служить генератором периодических колебаний.
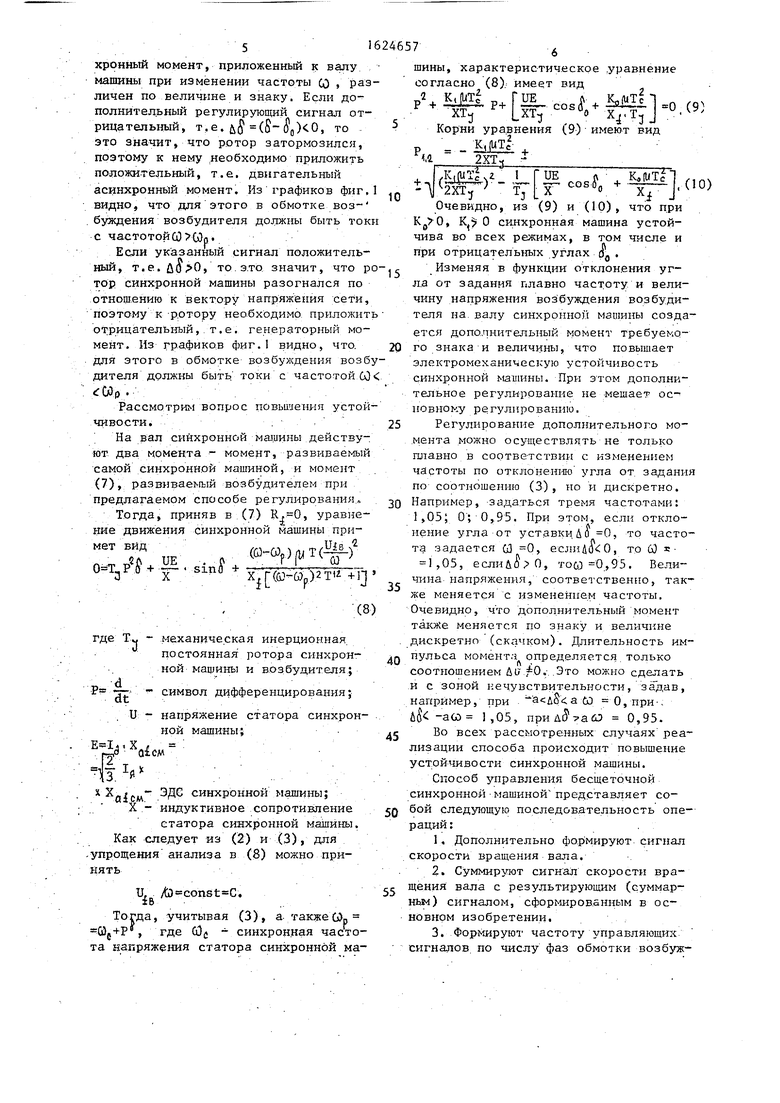
Формирователь (фиг.З) состоит из трех усилителей 21-23. Усилители 21 и 23 в цепи обратной связи имеют конденсаторы и работают в режиме интеграторов, усилитель 22 является инвертором. Все три усилителя включены последовательно , что обеспечивает поло- 1жительную обратную связь, | Положительная обратная связь с уси- лителя 21 на усилитель 22 необходима для компенсации внутренних потерь в формирователе.
Для стабилизации амплитуды выходного сигнала Асоа У применяются стабилизирующие ограничители из кремниевых стабилитронов, включенных в цепь обратной связи усилителей. Плавное изменение частоты на выходе Формирователя осуществляется с помощью сдвоенного регулируемого потенциометра с исполнительным элементом 24.
Выход усилителя 23 подключен к преобразователю 25 числа фаз по числу фаз многофазной обмотки 13 возбуждения возбудителя. Преобразователь 25 числа фаз может быть выполнен на операционных усилителях, на резисторах или на трансформаторах. Выход регулятора 17 соединен с первым входом элемента 26 сравнения, второй вход которого соединен с аналоговым выходом
10
15
20
30
40
45
91624657
датчика 27 частоты на выходе формирователя. Выход элемента 26 сравнения соединен с исполнительным элементом 24 сдвоенного регулируемого потенциометра, представляющим из себя быстро- 5 действующий привод движка потэнцио- метров (например, быстроходный асинхронный микродвигатель на 400 Гц или др.).
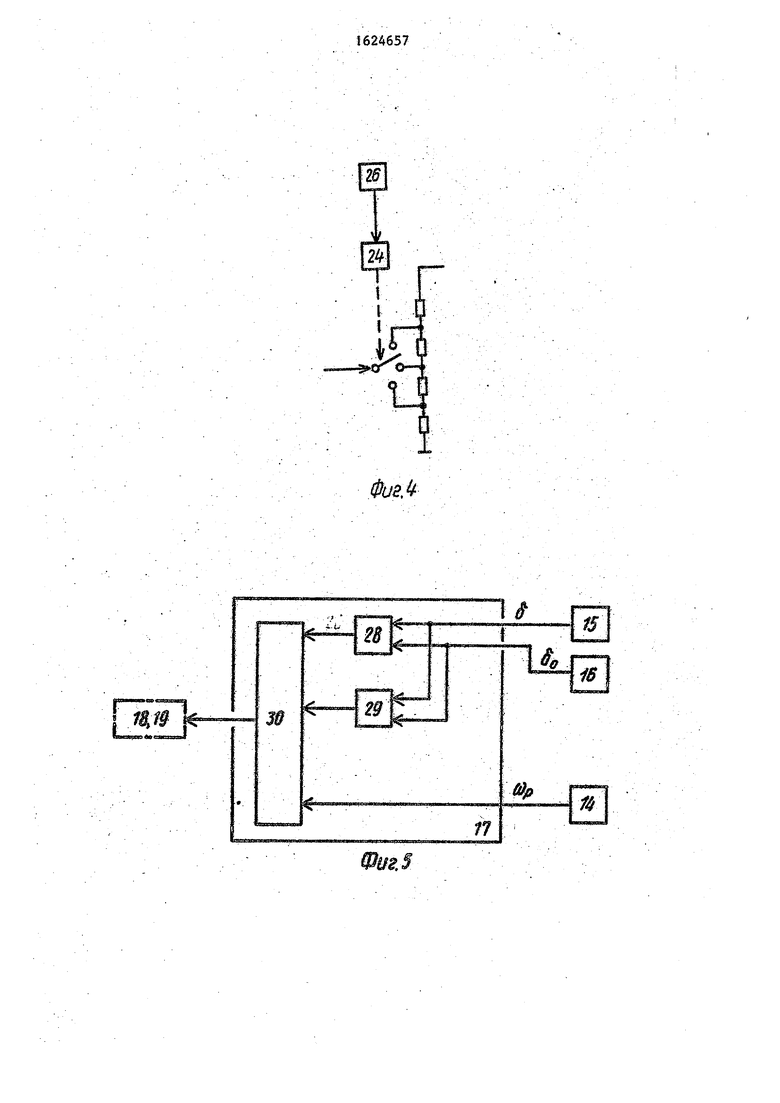
При рассогласовании задания по частоте от регулятора 17 и частоты на выходе формирователя по датчику 27 частоты исполнительный элемент 24 потенциометров вращает движок потенциометров до устранения этого рассогласования . При дискре гном изменении частоты формирователя 18 исполнительный элемент 24 потенциометров выполняется как переключатель с управлением также от регулятора 17. При этом (фиг.4) каждый из регулируемых потенциометров заменяется несколькими последовательно соединенными постоянными сопротивлениями, точки вза- 25 имного соединения которых подключены к клеммам переключателя. При этом элемент 26 выполняется как операционный усилитель в компар аторном режиме, а датчик 27 частоты не используется. Такое устройство проще в исполнении, обеспечивает высокое быстродействие, но дискретно. Источник 12 возбуждения может быть выполнен на повышенную частоту (например, на 400 Гц) или в качестве источника 12 можно чспольчо- 35 вать сеть промышленной частоты 50 Гц. В первом случае управляемый преобразователь 11 частоты может выполняться как тиристорный преобразователь частоты с непосредственной связью с соответствующей системой импульсно-фа- зового управления преобразователем частоты в качестве блока 10. Во втором случае управляемый преобразователь 11 частоты может быть выполнен как преобразователь частоты на основе инвертора тока,
В датчике 15 угла по гармоническим сигналам напряжения статора от
10
15 реализует соотношение (1). Схема реализации проста, поэтому ее не при водим .
В варианте выполнения регулятора 17 по фиг. 5 выходы соответственно датчика 15 и задатчика 16 угла соеди нены с входами дифференцирующего эле мента 28 (дифференциальный регулято и суммирующего элемента 29 Гпропор- циональный регулятор). Выходы элемен тов 28 и 29 и датчика 14 через сумма тор 30 соединены с выходом регулятора 17. При этом в соответствии с выражением (2) элемент 28 формирует си нал дифференциального регулирования
К, тг (o-ij) элемент 29 формирует
сигнал пропорционального регулирования KO(Ј- а).
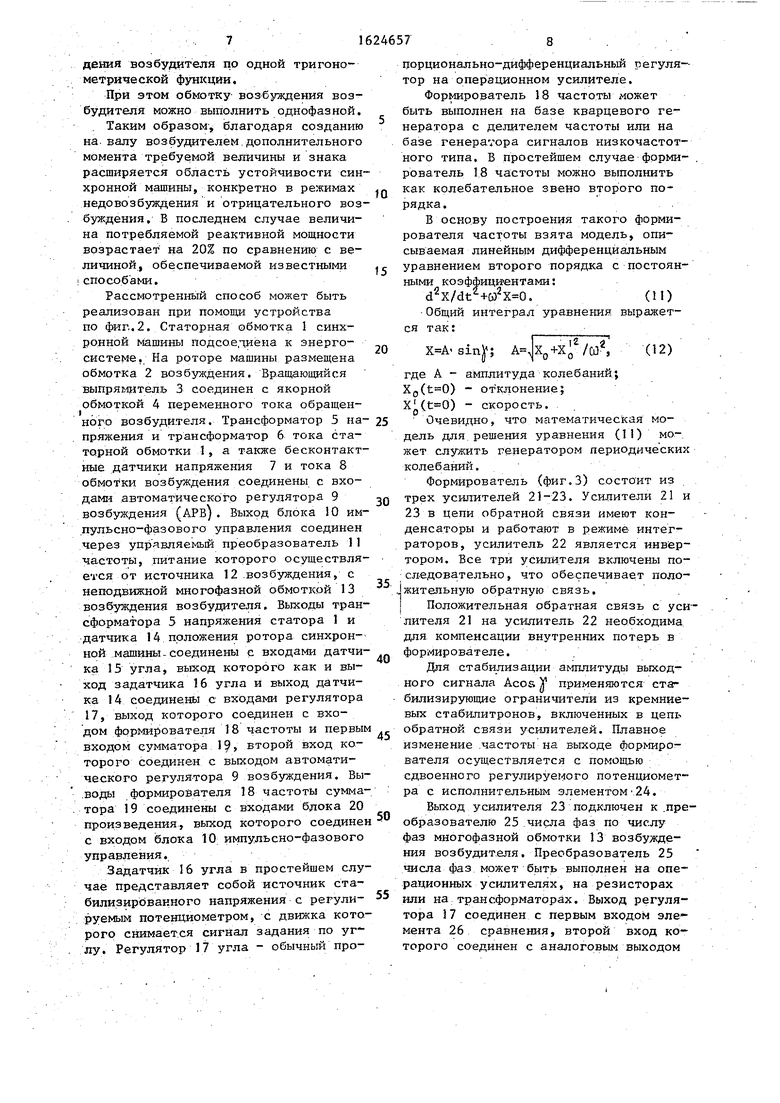
Схема датчика 14 положения ротора по фиг.6 содержит синхронный тахоге- нератор 31, выводы которого соединены с выпрямительным блоком 32, на вы ходе которого формируется сигнал, пропорциональный частоте (СЗр ) вращения ротора, и блоком 33 пассивных интеграторов (RC-цепочки), на выходе кото рого формируются гармонические сигна лы практически постоянной амплитуды, образующие вектор е С углового положения ротора.
Устройство реализует предлагаемый способ следующим образом.
По гармоническим сигналам трансформатора 5 напряжения и датчика -14 положения ротора в датчике 15 угла формируется сигнал в соответствии с выражением (1), пропорциональный углу, например, между поперечной осью ротора синхрог юй машины и вектором I напряжения ее статора. Сигналы угла от датчика 15 и задатчика 16 угла поступают в регулятор 17. При работе синхронной машины в режиме, напри мер, компенсатора с отрицательным - возбуждением задатчиком 16 формируют сигнал, соответствующий нулевому зна чению угла. При о.тклонении угла от задания регулятор 17 формирует протрансформатора 5 с частотой СОС и дат- «порционально-днфференциальный сигнал
чика 14 (например, синхронный тахо-в соответствии с выражением (2) по
генератор ) положения ротора с часто-этому отклонению, который поступает
той (Jpс помощью двух блоков произве-в формирователь 38 частоты по сигнадения и сумматора формируется гармо-лу (3), формирует гармонические сигнический сигнал разностной частоты, 55налы (4) заданной амплитуды по числу
а на функциональном блоке (arcsino)фаз обмотки 13 возбудителя. Формииз этого сигнала с периодизацией фор-рование задания по напряжению осущемируется требуемый угол, т.е. датчикствляется в сумматоре 19 по двум
0
5
0
0
0
5
4657
5
55
10
15 реализует соотношение (1). Схема реализации проста, поэтому ее не приводим .
В варианте выполнения регулятора 17 по фиг. 5 выходы соответственно датчика 15 и задатчика 16 угла соединены с входами дифференцирующего элемента 28 (дифференциальный регулятор и суммирующего элемента 29 Гпропор- циональный регулятор). Выходы элементов 28 и 29 и датчика 14 через сумматор 30 соединены с выходом регулятора 17. При этом в соответствии с выражением (2) элемент 28 формирует сигнал дифференциального регулирования
К, тг (o-ij) элемент 29 формирует
сигнал пропорционального регулирования KO(Ј- а).
Схема датчика 14 положения ротора по фиг.6 содержит синхронный тахоге- нератор 31, выводы которого соединены с выпрямительным блоком 32, на выходе которого формируется сигнал, пропорциональный частоте (СЗр ) вращения ротора, и блоком 33 пассивных интеграторов (RC-цепочки), на выходе которого формируются гармонические сигналы практически постоянной амплитуды, образующие вектор е С углового положения ротора.
Устройство реализует предлагаемый способ следующим образом.
По гармоническим сигналам трансформатора 5 напряжения и датчика -14 положения ротора в датчике 15 угла формируется сигнал в соответствии с выражением (1), пропорциональный углу, например, между поперечной осью ротора синхрог юй машины и вектором I напряжения ее статора. Сигналы угла от датчика 15 и задатчика 16 угла поступают в регулятор 17. При работе синхронной машины в режиме, например, компенсатора с отрицательным - возбуждением задатчиком 16 формируют сигнал, соответствующий нулевому значению угла. При о.тклонении угла от задания регулятор 17 формирует про
сигналам (5): по сигналу основного регулирования АРБ 9 и что дополнительному сигналу регулятора 17. В блоке 20 произведения сигналы с формиро- вателя 18 частоты и сумматора 19 пере множаются и на его выходе формируется вектор напряжения управления (6 } заданной амплитуды и частоты по числу фаз обмотки 13.
Напряжение управления подается на вход блока 10 импульсно-фазового управления преобразователем 11 частоты, что обеспечивает протекание по многофазной обмотке 13 возбуждения переменно го тока требуемой величины. Этот ток является током возбуждения возбудителя, величина и частота которого определяется АРБ 9 (он формирует основной сигнал управления по данным датчиков напряжения 5,7 и тока 6,8 и обеспечивает уровень напряжения на статоре 1 машины в соответствии с ус- тавкрй) и регулятором 17 с элементами 18 и Ј9 («они формируют дополнительные сигналы управления по частоте и напряжению по данным датчика 15 угла). Благодаря этому дополнительному регулированию гармоническое поле неподвижной обмотки 13 возбудителя имеет пря муго и сопряженную составляющие. Прямое поле вращается по отношению к якорной обмотке 4 возбудителя и тем самым создается дополнительный асин
0.
5
(
25 3д
0
хронный момент на валу синхронной машины, величина и знак которого однозначно определяются сигналом на выходе регулятора 17. Сопряженное поле через выпрямитель 3 обеспечивает основное возбуждение синхронной машины.
За счет создания в возбудителе дополнительного момента на валу требуемой величины и знака расширяется область устойчивости синхронной машины, конкретно в режимах недовозбужде- ния и отрицательного возбуждения. При этом в последнем случае величина потребляемой реактивной мощности возрастает на 20,% по сравнению с величиной, обеспечиваемой известными способами.
Формула изобретения
Способ управления бесщеточной синхронной машиной по авт. св. № 1305821, отличающийся тем, что с целью улучшения качества электроэнергии потребителей и упрощения, измеряют скорость вращения вала, сигнал, пропорциональный скорости вращения вала, суммируют с ранее сформированным сигналом и частоту управляющих сигналов по числу фаз обмотки возбуждения возбудителя формируют по полученному суммарному сигналу по одной гармонической функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |

Изобретение относится к области электротехники, более конкретно к синхронным машинам с бесщеточным возбуждением. Цель изобретения - улучшение качества электроэнергии потребителей и упрощение. В способе управления для этого формируют сигнал скорости вращения вала, суммируют его с ранее сформированным сигналом и формируют частоту управляющих сигналов, по числу фаз обмотки возбуждения возбудителя по одной гармонической функции. Это позволяет реализовать способ с помощью возбудителя с однофазной обмоткой возбуждения. 6 ил.
-оЛ.
02
I
о.ч
сриг. 4.
UU2.2
Физ.З
ФиъМ
tt
Шр
Wpt
Фиг. В
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| i | |||
