Оласть техники
Данное изобретение относится к цифровой связи. В частности, данное изобретение относится к способу и устройству для обнаружения пилот-сигнала в системе связи с расширенным спектром, такой как система сотовой телефонной связи с множественным доступом с кодовым разделением каналов.
Предшествующий уровень техники
Системы связи с множественным доступом с кодовым разделением (МДКР) каналов с непосредственной модуляцией несущей последовательностью предложены для использования в системах сотовой связи, в которых каналы трафика находятся на частоте 800 МГц, и в полосе частот системы персональной радиосвязи на частоте 1800 МГц. В системе МДКР с непосредственной модуляцией несущей последовательностью все базовые станции во всех ячейках могут использовать для связи одну и ту же радиочастоту. Одна из известных систем данного типа определена во Временном стандарте IS-95 TIA/EIA "Стандарт совместимости мобильной станции и базовой станции для двухрежимной широкополосной сотовой системы с расширенным спектром".
Кроме каналов трафика каждая базовая станция осуществляет передачу в канале пилот-сигнала, канале синхронизации и канале передачи сигнала системы поискового вызова. Пилот-сигнал представляет собой код псевдослучайного шума или код ПШ. Пилот-сигнал принимается всеми мобильными станциями в пределах данной дальности действия и используется мобильной станцией для идентифицирования присутствия системы МДКР, для вхождения в синхронизм с системой, для переключения каналов связи в режиме ожидания, идентификации сигналов исходных и задержанных траекторий базовых станций, с которыми осуществляется связь, и базовых станций, создающих помехи, и для когерентной демодуляции каналов синхронизации, системы поискового вызова (пейджингового канала) и трафика.
Пилот-сигнал, передаваемый каждой базовой станцией в системе, использует один и тот же код ПШ с разным фазовым сдвигом. Базовые станции однозначно идентифицируюгся с использованием однозначно определенного значения начальной фазы или начального времени для ПШ последовательностей (ПШП). Например, согласно Стандарту IS-95, последовательности имеют длину, равную 215 элементов сигнала, и их формируют с частотой следования элементарных посылок сигнала, равной 1,2288 мегаэлементов в секунду (Мэ/с), и повторяют каждые 26-2/3 мс. Минимальный интервал разнесения по времени составляет 64 элемента сигнала, имеет длину 64 элемента, что дает в итоге 512 разных значений фазы кода ПШ, выделяемых для базовых станций.
В мобильной станции принимаемые радиочастотные (РЧ) сигналы включают сигналы каналов пилот-сигнала, синхронизации, пейджингового канала и трафика от всех близлежащих базовых станций. Мобильная станция должна опознавать все принимаемые пилот-сигналы, включая пилот-сигнал от базовой станции с максимальным пилот-сигналом. В известных мобильных станциях для последовательного поиска фаз ПШ кода принимаемых пилот-сигналов в качестве элемента поиска пилот-сигнала используют коррелятор. Принятая фаза ПШ кода коррелируется с ПШ кодами системы, генерируемыми на мобильной станции. Знание корректных фаз ПШ кода базовой станции, с которой осуществляет связь мобильная станция, обеспечивает возможность когерентного детектирования сигналов всех других каналов, передаваемых данной базовой станцией. Некорректные фазы ПШ кода сформируют минимальный сигнал на выходе коррелятора.
Поскольку фазовое пространство ПШП является значительным, то осуществление последовательной корреляционной обработки в реальном времени для корректного обнаружения энергии пилот-сигнала потребует недопустимо большого времени. Как минимум, в случае мощных сигналов вхождение в синхронизм с системой при включении электропитания мобильной станции может потребовать до 2,5 с и более. Если пилот-сигналы отсутствуют, то мобильная станция продолжает поиск по всему фазовому пространству ПШП до истечения максимального времени ожидания, которое может составлять 15 с. Затем мобильная станция переходит на другую радиочастоту и вновь пытается осуществить вхождение в синхронизм с системой МДКР. Процесс поиска повторяется на последующих частотах до тех пор, пока не будет обнаружен пилот-сигнал.
Большие задержки времени обнаружения системы неудобны и нежелательны для большинства пользователей. Пользователь, включая свой радиотелефон, расчитывает на немедленное его использование, с минимальной задержкой. Задержка длительностью даже в 2,5 с для многих пользователей слишком долгая, а еще более длительные задержки могут иметь серьезные последствия, например, для срочных вызовов по номеру "911".
Известный способ поиска канала пилот-сигнала создает и другие ограничения для другого использования канала пилот-сигнала после вхождения в синхронизм с системой. Типовые приемники мобильных станций системы МДКР с прямой модуляцией последовательности сигнала несущей используют многоотводный приемник, имеющий три или более независимо управляемых отвода, которые выровнены во времени с корректными фазами ПШП, как определено элементом поиска фазы пилот-сигнала приемника. Отводы многоотводного приемника обычно выделяются для приема самых мощных сигналов траекторий, принимаемых от всех базовых станций, осуществляющих связь, как это определено в данном приемнике элементом поиска фазы пилот-сигнала. Процедура распределения траекторий обновляется в процессе сопровождения с использованием информации, полученной элементом поиска фазы пилот-сигнала.
Если элемент поиска фазы пилот-сигнала является медленнодействующим, в результате чего обеспечение назначения самых сильных сигналов траекторий определенным отводам приемника также замедляется, рабочие характеристики приема мобильной станции ухудшаются в условиях замирания. В определенных условиях, при использовании "быстрого ПШ кода", процент пропущенных вызовов становится высоким. Проблема "быстрого ПШ кода" возникает по той причине, что имеющиеся псевдошумовые пилот-сигналы изменяются настолько быстро, что известные элементы поиска не успевают их отслеживать.
Переключение связи в режиме ожидания представляет собой процедуру переключения на пейджинговый канал и прослушивание пейджингового канала с максимальным пилот-сигналом, как это определено элементом поиска пилот-сигнала. Когда мобильная станция принимает поисковый вызов или обращается к системе для установления вызова, важно, чтобы мобильная станция прослушивала поисковый вызов от базовой станции, относящейся к наиболее сильному принятому пилот-сигналу, либо получала доступ к этой станции. Для этого требуется быстродействующий элемент поиска фазы пилот-сигнала, особенно когда мобильная станция находится в движении.
Неудовлетворительные рабочие характеристики известного механизма поиска также отрицательно сказываются на характеристиках программируемого переключения каналов связи мобильной станции. Во время осуществления вызова в канале трафика элемент поиска пилот-сигнала используется для поддержки надлежащего распределения отводов многоотводного приемника для оптимальной демодуляции канала трафика и для идентификации базовых станций, создающих помехи. Если обнаружена базовая станция, создающая помехи, то мобильная станция сообщает о ней текущей базовой станции как о кандидате на программируемое ("мягкое") переключение каналов связи. Мягкое переключение каналов связи является таким состоянием системы МДКР с прямой модуляцией сигнала несущей последовательностью, в котором мобильная станция осуществляет связь одновременно с несколькими базовыми станциями. Нет необходимости, чтобы пилот-сигналы от соседних базовых станций находились близко друг к другу в фазовом пространстве пилот-сигнала. Поэтому, помимо быстродействия, элемент поиска должен обладать способностью просматривать все фазовое пространство и также осуществлять поиск только определенных смешений фазы ПШ-кода.
Новые требования, предъявляемые к мобильным станциям, делают необходимой обеспечение непрограммируемой ("жесткой") процедуры переключения каналов связи с поддержкой со стороны мобильной станции. При такой процедуре жесткого переключения каналов связи мобильная станция изменяет частоту радиоканала, когда она переключается с одной базовой станции на другую. В силу дуплексного характера эфирного интерфейса системы МДКР, для этого требуется разделение радиоканала, переход на другую частоту, поиск пилот-сигналов, возвращение на первоначальную частоту и повторное обнаружение пилот-сигнала для повторного установления линии связи. Известный элемент поиска, для которого требуется 2,5 с для приема пилот-сигнала, не подходит для использования поддерживаемого мобильной станцией жесткого переключения каналов связи.
Еще одно ограничение предшествующего уровня техники связано с прерывистым режимом работы. Для портативных мобильных станций с автономным батарейным питанием также важно сберегать ресурс батареи при ожидании поисковых вызовов. Стандарт IS-95 предусматривает прерывистый режим работы, который дает портативным станциям возможность отключить электропитание, кроме интервалов, когда относящаяся к ним информация поискового вызова передается базовыми станциями. Временной интервал поискового вызова может быть порядка 1,28 с, и периоды длительностью 1,28 с, умноженные на степени двух можно использовать для дополнительной экономии ресурса батареи. Во время этих интервалов мобильной станции нужно только контролировать пейджинговый канал до 160 мс и в остальное время находиться в состоянии бездействия в режиме низкого потребления энергии.
При работе в прерывистом режиме портативной станции может потребоваться производить поиск в фазовом пространстве до двадцати базовых станций при каждом переходе в активный режим. Для надежного приема в интервале поисковых вызовов после перехода в активное состояние портативная станция должна прослушивать базовую станцию, которая обеспечивает адекватную мощность сигнала. Когда мобильная станция находится в движении, правильно декодируемая базовая станция может легко перейти с одного интервала поискового вызова в следующий интервал поискового вызова. Поэтому для опознавания пилот-сигнала корректно выбранной базовой станции до начала выделенного временного интервала поискового вызова очень важно иметь быстродействующий механизм поиска пилот-сигнала. Применение известного механизма поиска требует, чтобы портативная станция переходила в активное состояние заблаговременно до временного интервала поискового вызова, чтобы иметь достаточно времени на осуществление последовательного поиска ПШП в фазовом пространстве. В результате этого существенно снижается потенциально возможная экономия ресурса батареи питания, обеспечиваемая прерывистым режимом поисковых вызовов.
Соответственно, существует потребность в быстродействующем и точном механизме поиска пилот-сигнала, который позволит повысить эффективность мобильной станции при идентификации системы МДКР с прямой модуляцией сигнала несущей последовательностью (обнаружении системы связи, предоставляющей обслуживание), вхождении в синхронизм, переключении каналов связи в режиме ожидания, мягком переключении каналов связи, прерывистом режиме работы и идентификации сигналов исходных траекторий и траекторий с задержками сигналов базовых станций, осуществляющих связь, и базовых станций, создающих помехи, в целях когерентной демодуляции каналов синхронизации, пейджинговых каналов и каналов трафика.
Краткое описание чертежей
Новые признаки данного изобретения сформулированы в прилагаемой формуле изобретения. Данное изобретение, наряду с его задачами и преимуществами, поясняется в нижеследующем описании, иллюстрируемом чертежами, на которых аналогичными цифровыми позициями обозначены одинаковые элементы и на которых представлено следующее:
фиг.1 - блок-схема системы связи;
фиг.2- блок-схема поискового приемника, используемого в радиотелефоне по фиг.1;
фиг. 3 - схема последовательности операций, соответствующей способу функционирования радиотелефона по фиг.1;
фиг. 4 - схема последовательности операций, соответствующей способу функционирования радиотелефона по фиг.1;
фиг. 5 - схема последовательности операций, соответствующей способу функционирования радиотелефона по фиг.1.
Подробное описание предпочтительного варианта осуществления
В соответствии с фиг. 1 система связи 100 содержит множество базовых станций, таких как базовая станция 102, обеспечивающих радиосвязь с одной или более мобильными станциями, такими как радиотелефон 104. Радиотелефон 104 выполнен с возможностью приема и передачи сигналов множественного доступа с кодовым разделением каналов с непосредственной модуляцией сигнала несущей последовательностью для осуществления связи с множеством базовых станций, включая базовую станцию 102. В иллюстрируемом варианте осуществления система связи 100 работает в соответствии с упомянутым Временным стандартом IS-95 на частоте 800 МГц. Альтернативно система связи 100 может работать в соответствии с другими системами МДКР, включая системы персональной радиосвязи на частоте 1800 МГц и любые другие системы МДКР с непосредственной модуляцией сигнала несущей последовательностью. Базовая станция 102 передает сигналы с расширенным спектром к радиотелефону 104. Символы в канале трафика расширяют по спектру с помощью кода Уолша по процедуре, которую можно определить как наложение кода Уолша на информационный сигнал. Каждой мобильной станции, такой как радиотелефон 104, присваивается уникальный код Уолша базовой станцией 102, в результате чего передача по каналу трафика к каждой мобильной станции ортогональна по отношению к передачам канала трафика к каждой другой мобильной станции.
Кроме каналов трафика базовая станция 102 осуществляет передачу в канале пилот-сигнала, канале синхронизации и канале поискового вызова (пейджинговом канале). Канал пилот-сигнала формируется из содержащей только нули последовательности данных, на которую осуществляется наложение нуль-кода Уолша, состоящего только из нулей. Канал пилот-сигнала обычно принимается всеми мобильными станциями в пределах данной дальности действия, и используется радиотелефоном 104 для идентификации присутствия системы МДКР, вхождения в синхронизм с системой, переключение каналов связи в режиме ожидания, идентификации сигналов исходных траекторий и траекторий, обусловливающих задержки базовых станций, осуществляющих связь, и базовых станций, создающих помехи, и для когерентной демодуляции каналов синхронизации, поискового вызова и трафика. Канал синхронизации используется для синхронизации тактирования мобильной станции с тактированием базовой станции. Канал поискового вызова используется для передачи информации поискового вызова от базовой станции 102 к мобильным станциям, включая радиотелефон 104.
Помимо наложения кода Уолша, сигналы всех каналов, передаваемые базовой станцией, расширяют по спектру с помощью ПСП, которую также называют последовательностью пилот-сигнала. Базовая станция 102 и все базовые станции в системе связи 100 однозначно идентифицируются с использованием уникальной начальной фазы, которую также называют начальным временем или фазовым сдвигом, для последовательности канала пилот-сигнала. Эти последовательности имеют длительность, равную 215 элементам, и формируются с частотой следования элементарных посылок сигнала, равной 1,2288 Мэ/с, и таким образом повторяют каждые 26-2/3 мс. Минимальный допустимый интервал разнесения во времени составляет 64 элемента, что дает в итоге 512 разных значений фазы ПШ-кода. Пилот-сигналы с расширенным спектром модулируют радиочастотную (РЧ) несущую и передается ко всем мобильным станциям, включая радиотелефон 104 в географической области, обслуживаемой базовой станцией 102. Псевдошумовая последовательность имеет сложный состав и содержит синфазную (I) и квадратурную (Q) составляющие. Специалисту в данной области понятно, что все описываемые здесь виды обработки пилот-сигнала подразумевают обе составляющие I и Q.
Радиотелефон 104 содержит антенну 106, аналоговый входной каскад 108, приемный канал, содержащий аналого-цифровой преобразователь (АЦП) 110, многоотводный приемник 112, поисковый приемник 114, контроллер 116 и передающий канал, содержащий передающую схему 118 и цифровой-аналоговый преобразователь 120. Антенна 106 принимает РЧ сигналы от базовой станциии 102 и от других соседних станций. Некоторые принимаемые РЧ сигналы являются непосредственно передаваемыми базовой станцией по траектории линии визирования. Прочие принимаемые РЧ сигналы являются сигналами многолучевого распространения и задержанными во времени.
Принятые РЧ сигналы преобразуются в электрические сигналы антенной 106 и поступают в аналоговый входной каскад 108. Аналоговый входной каскад 108 фильтрует сигналы и обеспечивает преобразование в сигналы полосы частот модулирующих сигналов. Аналоговые сигналы полосы частот модулирующих сигналов поступают в АЦП 110, который преобразует их в потоки цифровых данных для последующей обработки.
Многоотводный приемник 112 содержит множество приемных отводов, включая приемные отводы 122, 124 и 126. В описываемом варианте осуществления многоотводный приемник 112 содержит три приемных отвода. Но может быть использовано любое нужное число приемных отводов. Приемные отводы имеют обычную конструкцию. Каждый приемный отвод имеет линейный генератор последовательности (ЛГП) 128, используемый при детектировании пилот-сигналов в приемном отводе.
Контроллер 116 содержит генератор тактовых импульсов 134. Генератор тактовых импульсов 134 управляет тактированием радиотелефона 104. Контроллер 116 связан с остальными элементами радиотелефона 104. Эти взаимосвязи на фиг.1 не показаны во избежание ненужного усложнения чертежа.
Поисковый приемник 114 детектирует пилот-сигналы, принимаемые радиотелефоном 104 от множества базовых станций, включая базовую станцию 102. Поисковый приемник 114 осуществляет свертку пилот-сигнала с расширенным спектром с помощью коррелятора с использованием ПШ кодов, формируемых в радиотелефоне 104 с использованием местного опорного тактирования. После этой свертки сигналов с расширенным спектром значения сигнала для каждого периода элемента сигнала накапливаются в течение предварительно выбранного интервала времени. Это обеспечивает когерентное суммирование значений элементов сигнала. Полученную сумму сравнивают с пороговым уровнем. Суммы, превышающие пороговый уровень, обычно указывают на то, что определено должное тактирование пилот-сигнала. Выполнение и работа поискового приемника 114 изложены подробно ниже со ссылками на фиг.2.
Согласно фиг.2 поисковый приемник 114 содержит буфер выборок 202, коррелятор 204 и генератор ПШ 205. Генератор ПШ 205 содержит линейный генератор последовательности реального времени (АГП РВ) 206, линейный генератор последовательности нереального времени (ЛГП НРВ) 208, схему маски 210, регистр маски 212, регистр 214, контроллер поворота 216, счетчик поворота 217, контроллер тактовых импульсов 218 и делитель тактовых импульсов 220.
Поисковый приемник 114 детектирует пилот-сигналы для входа в синхронизм радиотелефона 104 с системой. Согласно данному изобретению поисковый приемник 114 дискретизирует принимаемый сигнал с первой частотой, запоминая множество выборок сигнала. Поисковый приемник 114 затем обрабатывает множество выборок сигнала с второй частотой, причем вторая частота превышает первую частоту, и идентифицирует один или несколько сигналов на основе множества выборок пилот-сигнала.
Буфер выборок 202 накапливает предварительно определенное число выборок сигнала. Буфер выборок 202 имеет вход 226, связанный с АЦП 110, и выход 224, связанный с коррелятором 204. АЦП принимает аналоговый сигнал s(t) от аналогового выходного каскада 108 и преобразовывает аналоговый сигнал в цифровые выборки. АЦП имеет тактовый вход 228, связанный с контроллером 218 тактовых импульсов, и формирует цифровую выборку в ответ на каждый принятый сигнал тактовых сигналов.
Контроллер 218 тактовых импульсов имеет вход 232, связанный с тактовым входом, первый выход 233, связанный с АЦП 110, второй выход 234, связанный с делителем тактовых импульсов 220, и третий выход 236, связанный с ЛГП НРВ 208. Контроллер тактовых импульсов 218 формирует тактовые сигналы на первом выходе 233 для обеспечения тактовых импульсов дискретизации в реальном времени для АЦП 110. Контроллер тактовых импульсов 218 формирует тактовые сигналы на втором выходе 234 для выдачи тактовых импульсов элементов сигнала в реальном времени для ЛГП РВ 206. Тактовые импульсы элемента сигнала в реальном времени обеспечивают приращения ЛГП РВ 206 по мере запоминания выборок в буфере выборок 202. Контроллер 218 тактовых импульсов формирует тактовые сигналы на третьем выходе 236 для выдачи тактовых импульсов элемента сигнала не в реальном времени. Тактовый вход 230 принимает синхронизирующие сигналы от любого соответствующего источника, такого как генератор тактовых импульсов 134 контроллера 116. В описываемом варианте осуществления контроллер 218 тактовых импульсов обеспечивает тактовые импульсы дискретизации в реальном времени для АЦП 110 на частоте, в два раза превышающей частоту следования элементарных посылок сигнала, равную 1,2288 Мэ/с. Можно использовать и другие подходящие частоты дискретизации.
В результате этого в течение каждого времени элемента сигнала в буфере выборок 202 запоминаются две выборки. Эти выборки запоминаются последовательно по принципу обратного магазинного типа. Указатель считывания/записи 222 указывает местоположение в буфере выборок для считывания и записи данных. Всего запоминаются 2N выборок, где N является величиной буфера выборки в интервалах элемента сигнала. Другими словами, N является длиной корреляции, а 2N - размер буфера. Размер буфера выборок может быть равным, например, 512.
Выборки, запомненные в буфере выборок 202, представляют сигнал, принятый радиотелефоном 104 от какой-либо близлежащей базовой станции, такой как базовая станция 102 (фиг.1). Сигнал может содержать непосредственно принятый пилот-сигнал или составляющую сигнала многолучевого распространения. Буфер выборок 202, таким образом, обеспечивает буфер для запоминания множества выборок принятого сигнала.
ЛГП РВ 206 является обычным линейным генератором последовательности, который формирует последовательность псевдослучайного шума с заданной точки запуска в ответ на тактовый сигнал, принимаемого на входе 240. ЛГП РВ 206 принимает тактовые сигналы от контроллера 218 тактовых импульсов. Эти тактовые сигналы, следовательно, являются тактовыми сигналами в реальном времени, а ЛГП РВ генерирует последовательность значений в ответ на тактовый сигнал в реальном времени.
ЛГП НРВ 208 является обычным генератором, который формирует последовательность, идентичную последовательности, формируемой ЛГП РВ 206 при загрузке тем же состоянием и тактируемой посредством входа 242. В соответствии с данным изобретением поисковый приемник 114 загружает состояние ЛГП РВ 206 в ЛГП НРВ 208 в определенный момент времени относительно запоминания заданного числа выборок в буфере выборок 202. По существу в то же время содержимое ЛГП РВ 206 переносится в регистр 214 для последующего использования. Операция загрузки состояния ЛГП НРВ из состояния ЛГП РВ в определенный момент времени относительно заполнения буфера обеспечивает опорный сигнал тактирования. Исходя из этого опорного сигнала тактирования выходные сигналы из схем, работающих не в реальном времени, могут отображаться в настройки тактирования реального времени с использованием счетчика поворота 217. Регистр 214 тем самым запоминает исходное состояние ЛГП НРВ 208, чтобы можно было сбросить ЛГП НРВ в его исходное опорное значение.
Тактовый вход 242 ЛГП НРВ 208 связан со вторым тактовым выходом 236 контроллера 218 тактовых импульсов. В соответствии с данным изобретением ЛГП НРВ 208 тактируется на частоте, которая отличается от частоты ЛГП РВ 206 и существенно превышает ее. Поэтому ЛГП НРВ 208 получает приращение в ответ на тактовый сигнал не в реальном времени.
Схема маски 210 применяет предварительно определенную маску, которая после обработки в соответствии с логической операцией ИСКЛЮЧАЮЩЕЕ ИЛИ совместно с содержимым ЛГП НРВ 208' обеспечивает корректное состояние генератора ПШ 205 в предварительно определенный момент времени в будущем. Схема маски 210 загружается любой маской, запомненной в регистре 212 маски, такой как маска 1, маска 2,... маска М. Маски соответствуют отдельным фазам фазового пространства пилот-сигналов в системе связи 100 (фиг.1).
Коррелятор 204 коррелирует множество выборок в буфере выборок 202 с последовательностью значений с ЛГП НРВ и формирует результат корреляции. В описываемом варианте осуществления коррелятор 204 содержит первый коррелятор, содержащий умножитель 250 и сумматор 252, и второй коррелятор, содержащий сумматор 256 и умножитель 258. Коррелятор 204 также содержит логическую схему 254. Умножитель 250 и сумматор 252 формирует первый результат корреляции на основании четных выборок из буфера выборок 202 и направляют первый результат корреляции в логическую схему 254. Умножитель 258 и сумматор 256 формируют второй результат корреляции на основании нечетных выборок из буфера выборок 202 и направляют второй результат корреляции в логическую схему 254. В рассматриваемом примере осуществления второй коррелятор, содержащий умножитель 258, принимает выборки от буфера выборок 202, которые запаздывают на одну выборку (половину времени элемента сигнала) по сравнению с выборками, принимаемыми первым коррелятором, содержащим умножитель 250.
Нужно отметить, что любое число фаз выборки может быть обработано в корреляторе 204 путем изменения числа корреляторов и соответствующих логических схем. Сокращение от двух фаз до одной фазы путем использования одной выборки на каждый интервал времени элемента сигнала уменьшит объем требуемых аппаратных средств за счет исключения одного коррелятора. С другой стороны, увеличение числа фаз обеспечит улучшение разрешающей способности по времени при корреляционной обработке.
Логическая схема 254 сравнивает результат корреляции с предварительно определенным порогом и отбрасывает результаты корреляции, которые не превышают данный порог. Те результаты корреляции, которые, по меньшей мере, превышают порог, запоминаются как соответствующие возможным корректным фазам пилот-сигнала. Таким образом, логическая схема 254 содержит некоторую память для запоминания данных. Запомненные результаты корреляции сортируют для обеспечения индикации относительной корреляции фазы пилот-сигнала.
Контроллер 216 поворота контролирует ЛГП НРВ 208 для обеспечения надлежащего выравнивания ЛГП НРВ с ЛГП РВ. Всякий раз, когда ЛГП НРВ 208 получает приращение относительно ЛГП РВ, получает приращение счетчик поворота 217. В тот момент, когда состояние ЛГП РВ загружается в ЛГП НРВ 208, два генератора последовательностей синхронизируются и счетчик поворота 217 инициализируется. Как будет описано ниже, они будут становиться по существу не синхронизированными в процессе операций поиска. Но для обратного обращения к реальному времени нужно только, чтобы отсчет числа выборок ЛГП НРВ был смещен относительно точки синхронизации. Счетчик поворота 217 обеспечивает этот отсчет. ЛГП РВ 206 обеспечивает опорный сигнал тактирования для поддержания опорного сигнала в реальном времени и постоянно тактируется с частотой следования элементарных посылок сигнала.
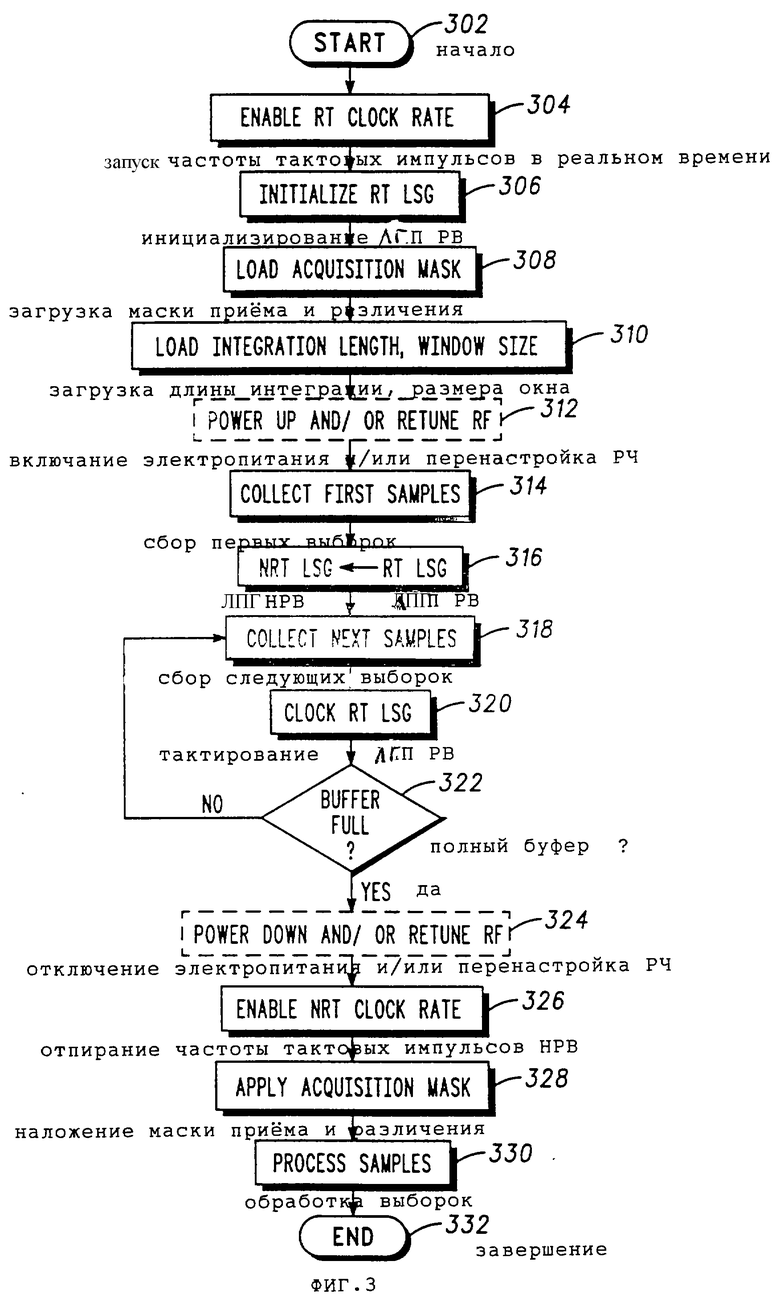
На фиг.3 представлена схема последовательности операций, иллюстрирующих работу радиотелефона 104 по фиг.1 для обнаружения пилот-сигнала в приемнике МДКР. Способ начинается на этапе 302. На этапе 304 запускают тактовые импульсы реального времени. Контроллер тактовых импульсов 218 обеспечивает тактовый сигнал на втором выходе 234 (фиг.2) с частотой, в два раза превышающей частоту следования элементарных посылок сигнала, равную 1,2288 Мэ/с. Это тактовый сигнал в реальном времени для АЦП 110. Этот тактовый сигнал делится делителем тактовых импульсов 220 для обеспечения тактового сигнала в реальном времени для ЛГП РВ 206. На этапе 306 ЛГП РВ 206 загружается исходным значением, инициализируя опорный сигнал тактирования.
На этапе 308 маска обнаружения сигнала загружается из регистра маски 212. Маска обнаружения является маской, соответствующей вхождению в синхронизм с пилот-сигналом, и, например, представляет собой маску нулевого сдвига, которая не смещает содержимое ЛГП НРВ 208. На этапе 310 загружается длина интегрирования и размер окна. Размер окна W соответствует числу подлежащих обработке задержек, выраженных в интервалах элемента сигнала. Согласно стандарту IS-95 значение размера окна принимается радиотелефоном 104 от базовой станции 102. Обычное значение для размера окна соответствует 60 интервалам элемента сигнала.
Длина интегрирования соответствует числу выборок, суммируемых сумматором 252. В рассматриваемом примере осуществления длина интегрирования равна N - половине числа выборок в буфере выборок 202, но может соответствовать и любому другому подходящему значению. В некоторых случаях предпочтительно интегрировать меньшее, чем N, число выборок. Например, если аналоговый входной каскад 108 неадекватно настроен на частоту передачи базовой станции 102, то будет присутствовать декоррелирующий эффект в силу интегрирования или коррелирования большого числа выборок. В этом примере декоррелирующие эффекты снижают интегрированием уменьшенного числа выборок, например, N/2, N/4 и др. Первое интегрирование выполняется интегрированием, например, первых N/2 выборок, затем выполняется второе интегрирование вторых N/2 выборок. Эти операции корреляционной обработки выполняются без подачи питания на РЧ компоненты или дополнительного накопления выборок, поскольку все выборки первоначально накоплены в буфере выборок 202.
На фиг. 3 этап 312 и этап 324 изображены пунктиром, чтобы специально из обозначить как необязательные. На этапе 312 радиотелефон 104 включает электропитание определенной части приемника МДКР. В рассматриваемом варианте осуществления питание подается на радиочастотные компоненты радиотелефона 104 (фиг.1). РЧ компоненты содержат аналоговый входной каскад 108 и АЦП 110. На этапе 324 после этапов накопления выборок (этап 314 - этап 322) питание РЧ компонентов отключается. Это позволяет запитывать РЧ компоненты, которые потребляют относительно большое количество энергии от батареи питания радиотелефона 104, только в необходимых случаях во время накопления выборок, тем самым экономя ресурс батареи питания. Этапы 312 и 324 необязательны в том смысле, что их можно не применять во всех последовательностях операций по схеме, представленной на фиг.3. Кроме того, во время вызова радиотелефон может кратко настроиться на другую частоту, накопить выборки в буфер, перенастроиться на первоначальную частоту и осуществить поиск пилот-сигнала с использованием накопленных выборок.
На этапе 314 первую выборку накапливают в буфере выборок 202. Тактовые сигналы подают с двойной частотой следования элементарных посылок сигнала на АЦП 110, а две выборки (соответствующие одному элементу сигнала) последовательно загружают в буфер выборок 202. В момент накопления первой выборки в буфере выборок 202, на этапе 316, содержимое ЛГП РВ 206 загружают в ЛГП НРВ 208. На этапе 318 дополнительные выборки накапливают в буфере выборок 202 запоминанием выборок пилот-сигнала в буфере выборок 202, а ЛГП РВ 206 тактируют на этапе 320. На этапе 322 буфер выборок 202 проверяют на условие заполненности. Управление сохраняется в цикле, образованном этапом 318, этапом 320 и этапом 322, пока это условие не будет выполнено. Альтернативно проверяется другое условие, такое как накопление предварительно определенного числа выборок, или любое другое соответствующее условие. На этапе 324 питание для РЧ компонентов понижается, либо перестраивается РЧ.
На этапе 326 осуществляют запуск тактовых импульсов не в реальном времени. Контроллер тактовых импульсов 218 подает в ЛГП НРВ 208 тактовые импульсы не в реальном времени. Частота тактовых импульсов не в реальном времени может быть любой доступной частотой тактовых импульсов, либо ее кратным значением, но предпочтительно она существенно превышает частоту тактовых импульсов в реальном времени, используемую для выборок тактирования, направляемых в буфер выборок 202. Например, согласно стандарту IS-95, где тактовые сигналы реального времени соотнесены с частотой следования элементарных посылок сигнала, равной 1,2288 Мэ/с, частота тактовых импульсов не в реальном времени может быть равна 80 МГц. На этапе 328 маску обнаружения радиосигнала загружают в схему 210 маски. На этапе 330 обрабатываются выборки в буфере выборок 202 - способ, который более подробно иллюстрируется на фиг.4. Способ по фиг.3 завершается на этапе 332.
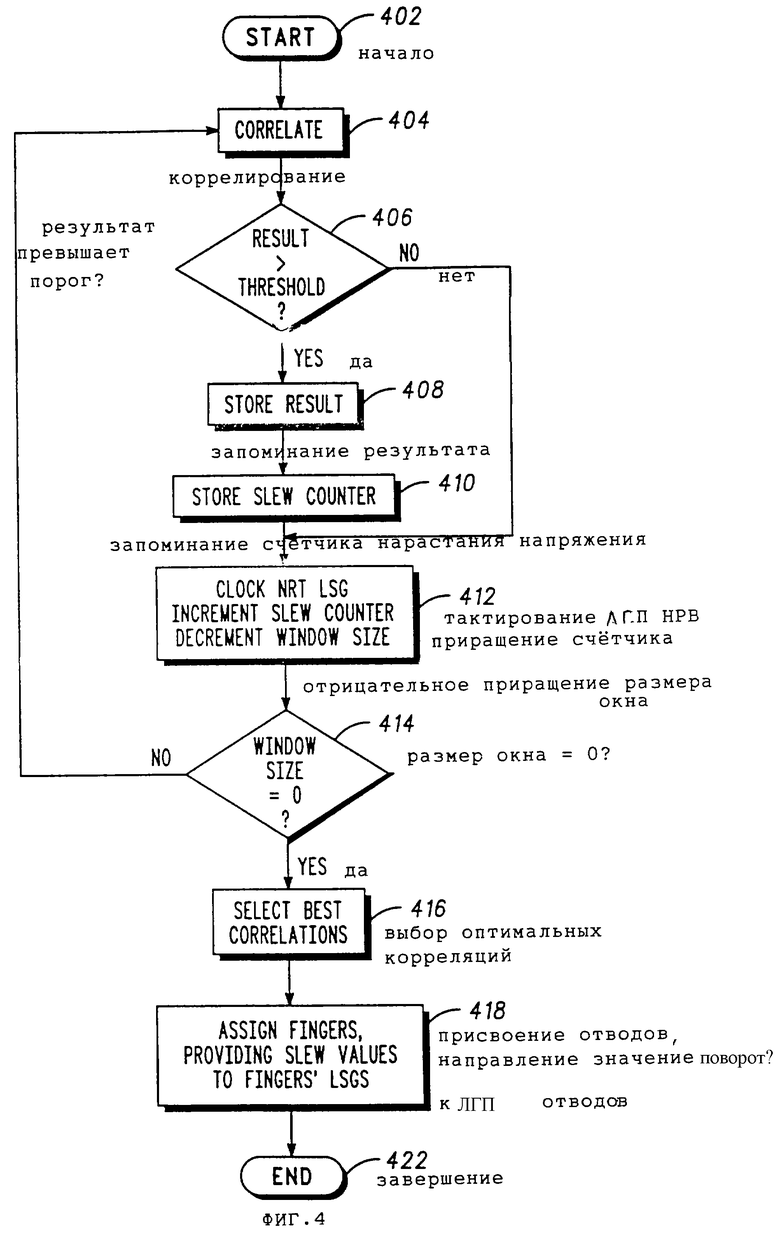
Фиг.4 иллюстрирует способ работы радиотелефона 104 по фиг.1 для обработки запомненных выборок пилот-сигнала. Способ начинается на этапе 402.
На этапе 404 коррелятор 204 коррелирует запомненные выборки в буфере выборок 202 и содержимое линейного генератора последовательности не в реальном времени (ЛГП НРВ) 208. Результат корреляции от сумматора 252 подается на логическую схему 254, которая определяет, превышает ли результат корреляции порог (этап 406). Если не превышает, то обработка продолжается на этапе 412. Если результат превышает порог, то его запоминают. Кроме этого запоминается значение счетчика поворота, содержащееся в счетчике поворота 217 (этап 410). Значение отсчета в счетчике поворота соответствует числу приращений ЛГП НРВ 208. На этапе 412 получает приращение ЛГП НРВ 208, устанавливая значение выравнивания ЛГП НРВ для каждой корреляции. Также счетчик поворота 217 получает приращение, а размер окна получает отрицательное приращение. На этапе 414 проверяется размер окна и, если условие выхода не выполнено, то обработка продолжает осуществляться циклически на этапах 404-414. Этот цикл повторно выполняет корреляцию запомненных выборок и содержимого линейного генератора последовательности ЛГП НРВ 208.
В одном из вариантов осуществления данное изобретение обеспечивает характеристику "ранней разгрузки". В этом варианте осуществления коррелятор 204 коррелирует неполный буфер выборок, например N/2 выборок. Результат этой корреляции сравнивают с порогом. Если корреляция превышает порог, то остающиеся выборки в буфере выборки коррелируют, и действие продолжается в изложенном выше порядке. В двухфазном корреляторе, в соответствии с изображением на фиг.2, если какое-либо одно из двух значений корреляции превышает порог, то обработка продолжается в изложенном выше порядке. Но если оба результата корреляции меньше порога, то корреляцию отменяют, ЛГП НРВ 208 получает приращение, счетчик поворота 217 получает приращение, и обработка продолжается. Режим "ранней разгрузки" повышает эффективность поискового приемника тем, что дает возможность быстро отбросить, без выполнения полной корреляции, фазы ПСШ, которые содержат небольшую энергию или вовсе ее не содержат.
На этапе 416 логическая схема 254 выбирает множество оптимальных корреляций для присвоения обнаруженным пилот-сигналам по меньшей мере одного приемного отвода многоотводного приемника. Множество оптимальных корреляций может иметь одну или несколько корреляций в зависимости от результатов корреляции и числа распределяемых отводов многоотводного приемника. На основании результатов корреляции логическая схема 254 выбирает некоторое число оптимальных пилот-сигналов, соответствующих используемым при обработке приемным отводам в многоотводном приемнике 112. Если обнаружен сигнал однолучевой траектории, т.е. траектории сигнала, непосредственно принимаемого от базовой станции, либо сигнал траектории многолучевого распространения, то будет присвоен один приемный отвод многоотводного приемника 112 (фиг.1), - этап 418. Если от разных базовых станций (с разными фазами пилот-сигнала) обнаружены сигналы траекторий многолучевого распространения, то соответствующие сигналы траектории многолучевого распространения будут присвоены нескольким отводам многоотводного приемника 112. Аналогично, если ранее были распределены все отводы многоотводного приемника 112, то логическая схема 254 будет определять, нужно ли повторно присвоить какой-либо отвод другой траектории на основе результатов корреляции. Таким образом, этап 418 предусматривает выделение отвода приемника для приема составляющих сигнала, исходя из результатов корреляции.
Процедура распределения отводов включает приращение ЛГП отводов для выравнивания их с представляющими интерес пилот-сигналами и составляющими многолучевого распространения. Отсчет счетчика поворота, запомненный на этапе 410 для пилот-сигнала или соответствующей траектории, которые превышают порог, на этапе 405 обеспечивает разность в 1/2 элемента между тактированием мобильной станции и тактированием представляющих интерес пилот-сигнала (или траектории). На этапе 418 отсчет счетчика поворота запомненной логической схемой 254, подается на ЛГП 128 приемного отвода, который выделяется обнаруженным пилот-сигналам. Таким образом, поисковый приемник 114 обеспечивает значение выравнивания ЛГП НРВ, которое соответствует одной из множества наилучших корреляций, для ЛГП отвода, относящегося по меньшей мере к одному приемному отводу. Этот по меньшей мере один приемный отвод использует отсчет счетчика поворота для выравнивания своего ЛГП отвода относительно тактирования обнаруженного пилот-сигнала и начинает детектировать пилот-сигнал. Способ обработки выборок завершается на этапе 422.
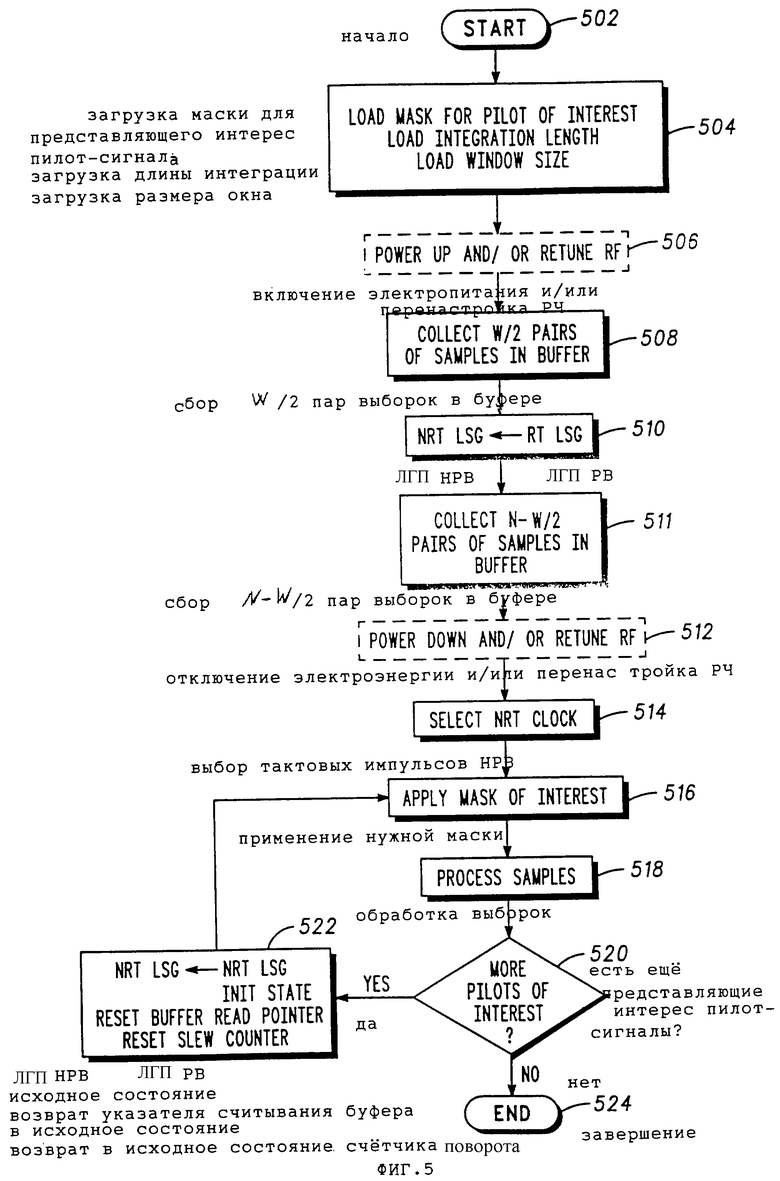
Фиг. 5 иллюстрирует функционирование радиотелефона 104 по фиг.1 при обеспечении распределений отводов. Способ начинается на этапе 502. На этапе 504 маску полезного пилот-сигнала загружают из регистра 212 маски в схему маски 210. Также загружают длину интегрирования и размер окна. На этапе 506 для РЧ компонентов в случае необходимости включают питание. Если необходим поиск или настройка на другую частоту, то радиотелефон настраивается на новую частоту.
На этапе 508 в буфере выборки 202 накапливается некоторое число пар выборок, равное половине размера окна (W/2). Дискретизация производится с помощью тактовых импульсов в реальном времени. Пары выборок собирают по той причине, как указано выше, что дискретизация пилот-сигнала производится на двойной частоте следования элементарных посылок сигнала. Каждая пара выборок соответствует одному элементу сигнала. В буфере выборки 202 могут быть накоплены другие количества элементов сигналов или выборок в зависимости от конкретного выполнения.
На этапе 510 содержимое ЛГП РВ 206 загружается в ЛГП НРВ 208. Благодаря запоминанию W/2 пар выборок, до загрузки состояния, ЛГП РВ, ЛГП НРВ получает эффективный сдвиг своего состояния на половину размера окна, выраженного в элементах сигнала, относительно первой выборки. Теперь, если W корреляции выполняются последовательно, начиная с исходного состояния, с приращением одного элемента сигнала на одну корреляцию, то поиск займет интервал от -W/2 до +W/2. После загрузки ЛГП НРВ на этапе 510 должны быть накоплены остающиеся выборки N-(W/2) (этап 511). После накопления этих выборок РЧ компоненты можно отключить от электропитания на этапе 512 или повторно настроить на первоначальную частоту.
На этапе 514 выбирают частоту тактовых импульсов НРВ, используемую в ЛГП НРВ 208 для обработки. Нужную маску используют для содержимого ЛГП НРВ 208 на этапе 516 и на этапе 518; выборки обрабатывают. На этапе 518 выполняют этапы, соответствующие этапам 402 - 422 по фиг.4. После обработки полного буфера выборок на этапе 520 определяют, есть ли еще представляющие интерес пилот-сигналы. Например, после перехода из состояния бездействия в активное состояние в прерывистом режиме работы поисковый приемник 114 имеет перечень активных пилот-сигналов, перечень кандидатов в пилот-сигналы и перечень смежных пилот-сигналов, которые надо проанализировать на наличие энергии пилот-сигнала для обнаружения пилот-сигналов, пригодных для выделения отвода приемника. Если имеются еще другие представляющие интерес пилот-сигналы, то на этапе 522 исходное состояние ЛГП НРВ 208, которое было запомнено в регистре 214, загружают в ЛГП НРВ 208, возвращая ЛГП НРВ 208 в исходное состояние, и новую маску загружают в схему маски 210, смещая ЛГП НРВ в следующее состояние. Следующее состояние ЛГП НРВ соответствует следующему представляющему интерес пилот-сигналу. Другие подходящие способы смещения состояния ЛГП НРВ включают в себя вычисление следующего состояния ЛГП НРВ и приращение или отрицательное приращение ЛГП НРВ для получения следующего состояния ЛГП НРВ. Также на этапе 522 указатель считывания/записи 222 буфера выборки 202 сбрасывается в исходное состояние 0, и устанавливается в исходное состояние счетчик поворота 217. Это соответствует возвращению ЛГП НРВ в исходное состояние с помощью опорного значения тактирования. Маску для следующего представляющего интерес пилот-сигнала загружают на этапе 516. Этапы 516-522 повторяют до тех пор, пока не будут обработаны все представляющие интерес пилот-сигналы. Способ завершается на этапе 524.
Как следует из вышеизложенного, данное изобретение обеспечивает способ и устройство для быстрого обнаружения пилот-сигналов в приемнике МСДКРК. Поскольку в буфере накапливают множество выборок, обработку сигналов можно отделить от частоты следования элементарных посылок, и решения по обнаружению пилот-сигналов можно принимать гораздо быстрее с помощью тактовых импульсов не в реальном времени. Поскольку поисковый приемник имеет повышенное быстродействие, задержки обнаружения пилот-сигнала устраняются, что устраняет проблемы, связанные с быстрым ПШ-кодом. При работе в прерывистом режиме нужно только, чтобы радиотелефон переводился из состояния бездействия в активное состояние заблаговременно до назначенного ему интервала времени с целью быстрого приема и различения пилот-сигналов. Сопровождение канала пилот-сигнала в этом изобретении характеризуется более высоким быстродействием, в результате чего улучшается надежность переключения каналов связи в режиме ожидания и мягкого переключения каналов связи. Поскольку выборки буферизируют, то после накопления выборок аналоговый каскадный входной каскад свободен для настройки на другую частоту при поддерживаемом мобильной станцией жестком переключении каналов связи.
Хотя описан конкретный вариант осуществления данного изобретения, однако возможны различные модификации. Например, можно изменять порядок этапов способа, заменять или отменять их. Поэтому следует иметь в виду, что прилагаемая формула изобретения включает в себя все такие замены и изменения, которые действительно соответствуют сущности и объему данного изобретения.

Поисковый приемник содержит буфер выборки, который запоминает выборки сигналов, загруженные с помощью тактового сигнала реального времени. Линейный генератор последовательности реального времени (ЛГП РВ) запоминает исходное состояние и тактируется с помощью тактовых импульсов в реальном времени. Содержание ЛГП РВ загружается в линейный генератор последовательности нереального времени, когда начинается обработка выборок. Выборки коррелируют с использованием тактового сигнала не в реальном времени, чтобы обработку сигнала можно было отделить от частоты следования элементарных посылок сигнала. Аналоговый входной каскад может отключаться от электропитания или настраиваться на другую частоту во время обработки не в реальном времени. Технический результат заключается в точном поиске пилот-сигнала. 4 с. и 6 з.п. ф-лы, 5 ил.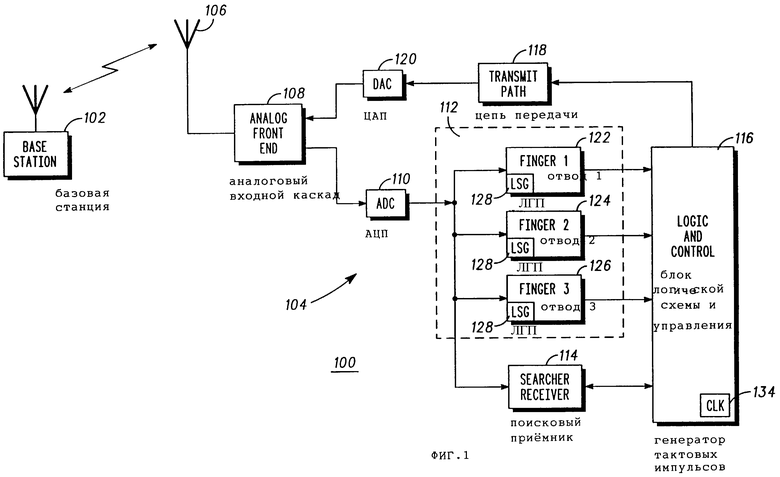
| US 5596571 А, 21.01.1997 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РАДИОТЕЛЕФОННОЙ СВЯЗИ | 1991 |
|
RU2010433C1 |
| Энергосистема | 1976 |
|
SU690588A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

