Изобретение относится к машиностроению, в частности к исполнительным механизмам роботов-манипуляторов.
Целью изобретения является упрощение управления исполнительным механизмом робота..
Это достигается тем, что в исполнительном механизме робота шарнир, соединяющий один из основных шатунов с дополнительным шатуном, совмещен с шарниром, соединяющим упомянутый основной шатун с соответствующим основным кривошипом.
На фиг. 1 показана кинематическая схема заявляемого исполнительного механизма робота с двумя рабочими органами; на фиг.2 (а, б)пример манипулирования двумя объектами; на фиг.З (а, б, в) - пример манипулирования одним объектом.
Исполнительный механизм робота додержит основание 1. кривошипы 2., и 4, причем кривошипы 2, 3 шарнирно связаны с приводными двигателями 5, б, расположенными на основании 1, а кривошип 4 шарнирно соединен с основанием 1. Кривошипы 2, 3 и 4 шарнирно соединены с шатунами 7, 8, 9 соответственно. Шатуны 7, 8 шарнирно связаны между собой, а шатун 9 присоединен к шарниру, связывающему кривошип 3 с шатуном 8. Шатуны 7 и 9 снабжены захватами 10 и 11 соответственно и могут быть выполнены в виде базисных звеньев. Кривошипы 2 и 3 и шатуны 7,8 образуют замкнутый пятизвенный механизм, а кривошипы 3, 4 и шатун 9 - замкнутый четырехзвенный механизм.
Исполнительный механизм робота работает следующим образом.
Кривошипы 2, 3 от двигателей 5, 6 совершают вращение на требуемые углы р и (pi , за счет чего обеспечивается позиционирование захватов 10, 11 в рабочей зоне исполнительного механизма.
Поскольку захват 11 находится на шатуне 9 четырехзвенникз EDFG, траектория его движения является шатунной кривой, рассчитываемой при проектировании механизма; следовательно соответствие положения захвата 1Т на шатунной кривой углу р2 кривошипа 3 известно заранее. При позиционировании захвата 10 решается обратная задача кинематики, для четырехзвенника ABCD с учетом положения точки D, как точки, принадлежащей четырехзвеннику EDFG. Она сводится к решению одного уравнения относительно угла f 1 (положения кривошипа 2).
Таким образом координаты положения . захвата 10 одного рабочего органа определяются угловым положением кривошипов 2
0
5
0
5
.0
5
0
5
0
5
и 3, а требуемые перемещения захвата 11 осуществляются путем передачи движения только кривошипа 3 на шатун 9. ;
В зависимости.от вида технологической операции работа исполнительного механизма робота может осуществляться в двух режимах.
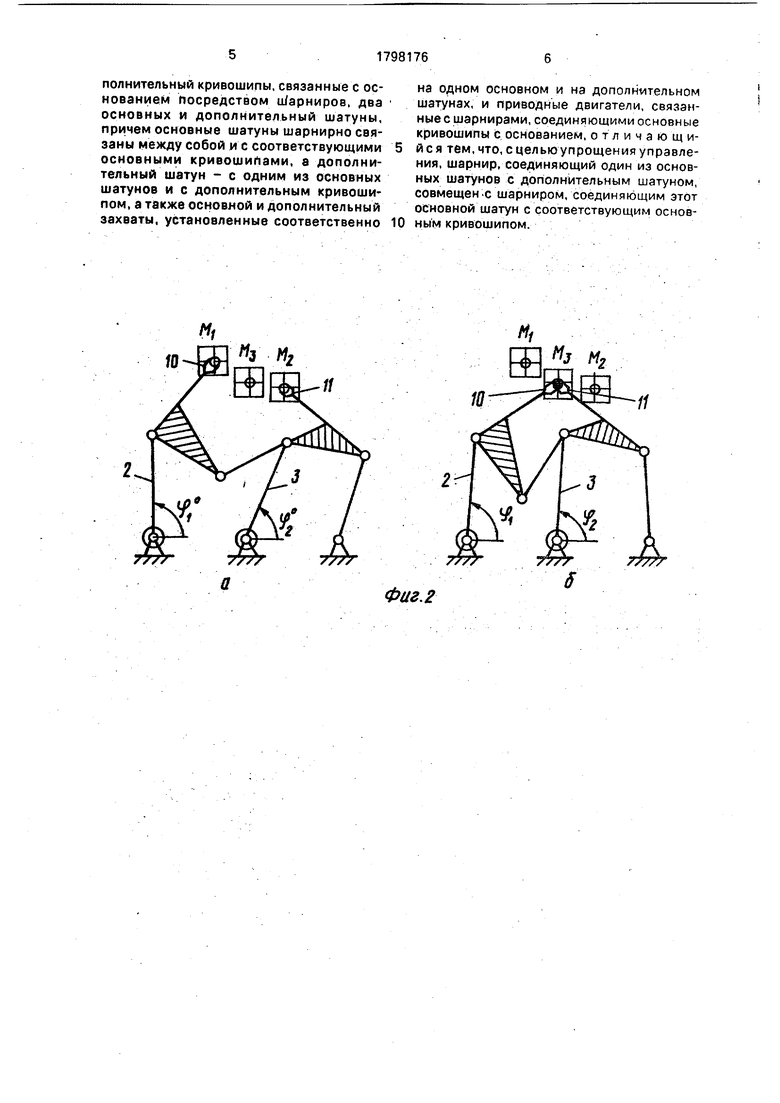
В первом режиме осуществляется одновременное манипулирование двумя объектами (фйг.2). В исходном положении механизма (фиг.2а) с начальными угловыми
координатами кривошипов 2,3 - # и Ј , соответственно, осуществляется захватывание захватами 10 и 11 объектов манипулирования с рабочих позиций Mi и М2. Далее осуществляется перемещение объектов в заданную точку позиционирования Мз под действием управляющих воздействий fn и рг (фиг. 26)..
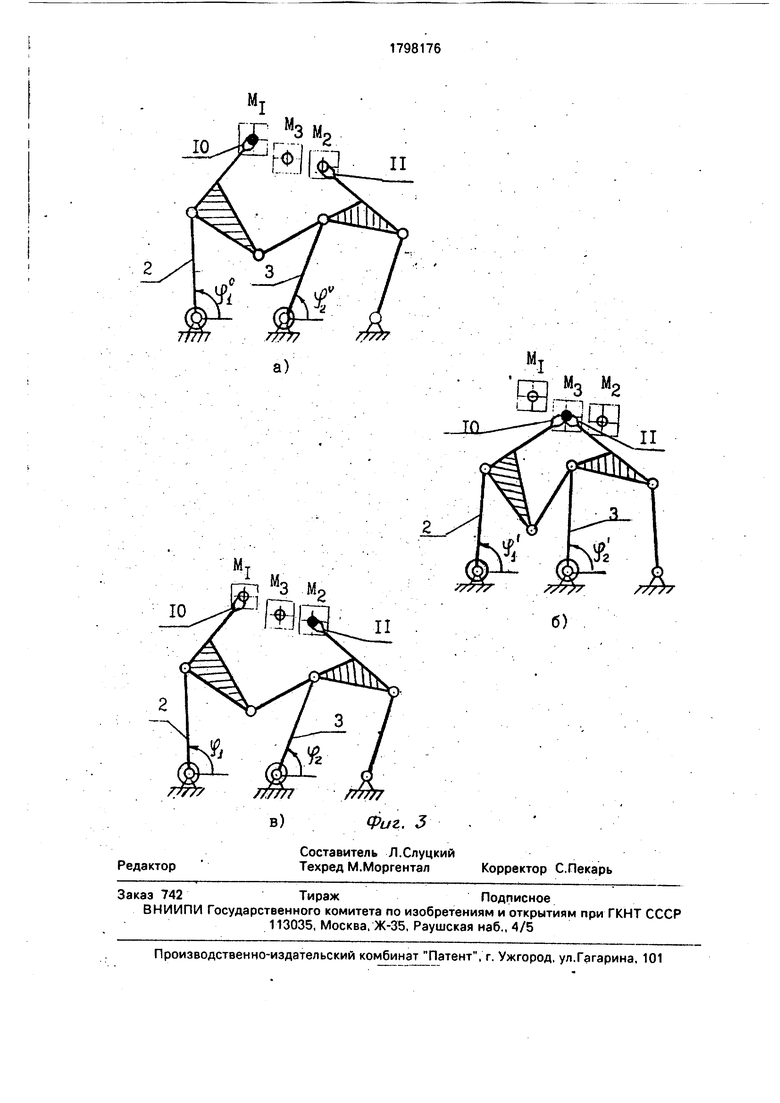
Во втором режиме осуществляется поочередное манипулирование одним объектом (фиг.З). При этом в исходном положении механизма с начальными угловыми координатами кривошипов 2, 3 - и $ соответственно происходит захватывание объекта манипулирования захватом 10 в рабочей позиции Mi (фиг.За). Затем осуществляется перемещение манйпулируемого объекта в промежуточную позицию Мз. под действием управляющих воздействий и fk , и его передача от захвата 10 к захвату 11 путем расжатия первого и сжатия второго (фиг.Зб). Далее осуществляется перемещение объекта манипулирования захватом 11 в заданную точку позиционирования М под действием управляющего воздействия fz (конечное положение механизма показано на фиг.Зв). .; ....
По сравнению с прототипом управление заявляемым исполнительным механизмом значительно упрощается, т.к. сокращается объем вычислений, необходимых для определения углов поворота кривошипов при позиционировании захватов механизма, состоящего из четырехзвенника и пятизвен- ника, В этом случае при работе двумя рабочими органами решается только одно. уравнение, в то время как при работе устройства - прототипа, состоящего из двух пятизвенников, решается система из двух уравнений.
Таким образом упрощается программное обеспечение работа - манипулятора, а следовательно и система управления, что ведёт к ее удешевлению.
Формула изобретения
Исполнительный механизм робота, содержащий основание, два основных и дополнительный кривошипы, связанные с основанием посредством u/арниров, два основных и дополнительный шатуны, причем основные шатуны шарнирно связаны между собой и с соответствующими основными кривошипами, а дополнительный шатун - с одним из основных шатунов и с дополнительным кривошипом, а также основной и дополнительный захваты, установленные соответственно
0
на одном основном и на дополнительном шатунах, и приводные двигатели, связанные с шарнирами, соединяющими основные кривошипы с основанием, отличающийся тем, что, с цел ью упрощения управления, шарнир, соединяющий один из основных шатунов с дополнительным шатуном, совмещен -с шарниром, соединяющим этот основной шатун с соответствующим основным кривошипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм робота | 1990 |
|
SU1722806A1 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| МНОГООПОРНЫЙ ПЛАТФОРМЕННЫЙ РОБОТ | 2024 |
|
RU2839628C1 |
Использование: в машиностроении, а именно в исполнительных механизмах роботов-манипуляторов. Кривошипы 2 и 3 являются основными и шарнирно связаны с приводными двигателями 5 и 6, расположенными на оснований 1, а кривошип 4 является дополнительным и шарнирно соединен с основанием 1. Кривошипы шарнирно соединены с шатунами 7,8, и 9, соответственно, причем шатуны 7 и 8 шарнирно Связаны между собой, а шатун 9 присоединен к шарниру, связывающему кривошип 3 с шатуном 8, что упрощает управление захватами 10 и 11. 3 ил.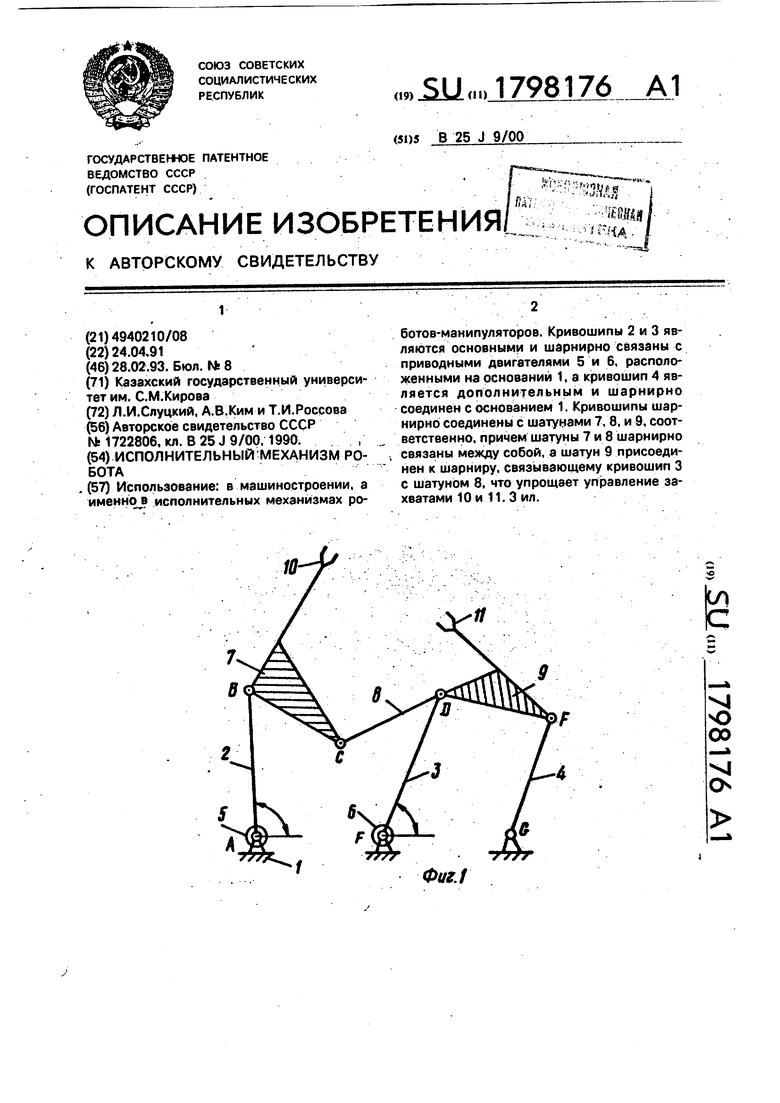
Фиг. 2
| Исполнительный механизм робота | 1990 |
|
SU1722806A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
