ретения является расширение эксплуатационных возможностей за счет определения погрешности направления визирования телескопа д.пя произвольного положения трубыо Отклоняют контролируемую трубу 22 телескопа в любое заданное направление. Проектируют в поле зрения трубы телескопа излучение коллиматора, соединенного с кронштейном 1, который в свою очередь закреплен на трубе телескопа с помощью зеркально-призменного узла 16 коллинеарного переноса. Пространственное положение оптической оси коллиматора, выполненного по биоканальной схеме, контролирует с помощью датчиков 6, 7 угла поворота, скрепленных с несущим валом 5 и ориентированных в двух взаимно перпендикулярных направлениях, и с помощью координатора, определяющего величину смещения изображения световой отмет1
Изобретение относится к измерительной технике и может быть использовано для проверки точности визирования крупногабаритных телескопов в заданное направление.
Цель изобретения - расишрение эксплуатационных возможностей за счет определения погрешности направления визирования телескопа для проивольного положения трубы.
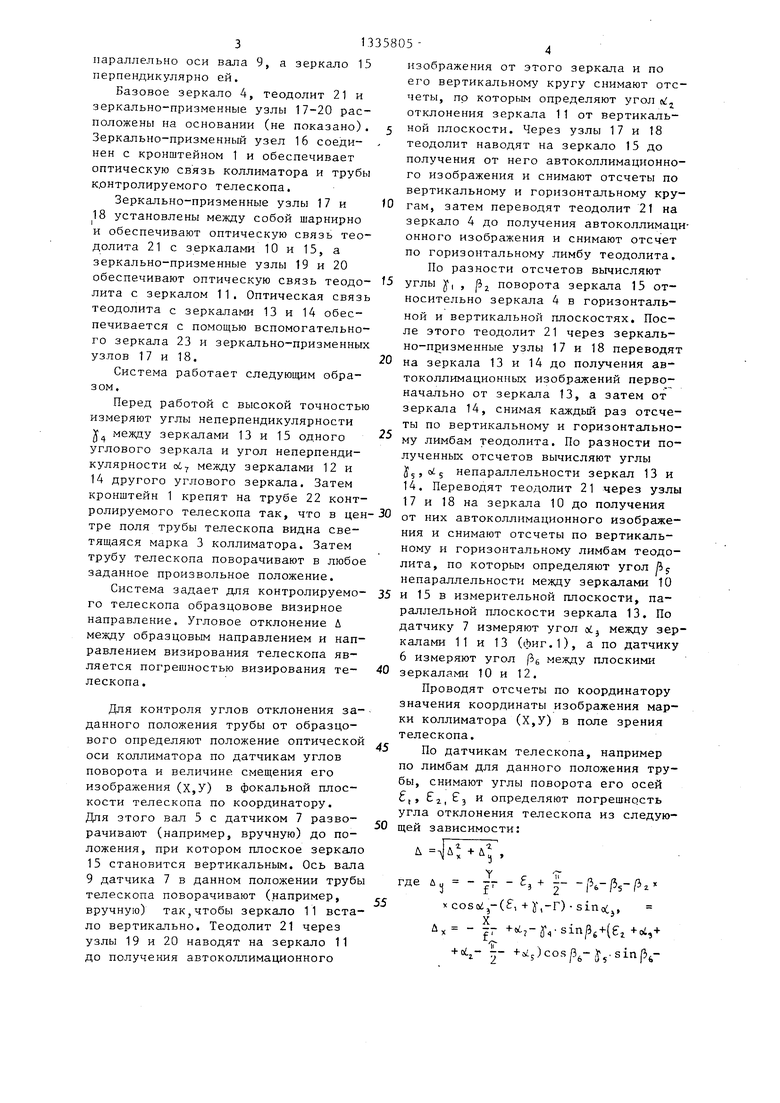
На фиг.1 показана принципиальная схема системы; на фиг.2 - зеркально- призменные узлы и их взаимное расположение относительно трубы телескопа
Система содержит кронштейн 1 (фиг.1), предназначенный для соединения с трубой контролируемого телескопа, объектив 2 коллиматора с маркой 3, нанесенной в его главной точке, базовое зеркало 4, несущий вал 5, два датчика 6 и 7 угла поворота, каждый из которых имеет вал 8 и 9 вращения, два зеркала 10 и 11р каждое из которых установлено на валу вращения одного из датчиков, два угловых зеркала, образованных зеркалами 12 и 14, 13 и 15, каждое из
ки коллиматора в поле зрения трубы телескопа. Пространственное положени Гхаждого угла контролируют относительно ;1еподвижно установленного базоног о 4 (неподвижной системы координат) с помощью теодолита 21 с автоколлимационным окуляром, излучение которого через четыре зеркально-призмснных узла, сое- диненных по два шарнирно между собой в обеих контролируемых плоскостях, последовательно направляют на зеркало, установленное на валу вращения каждого датчика, и на угловое зеркало, соединенное с корпусом датчика По измереннььм углам датчиков, величине смещения световой отметки в по- :ге зрения телескопа и углам разворота зеркал, скрепленных с датчиками, вычисляют образцовое направление и (определяют угловое отклонение от не- | о визирной оси телескопа, 2 ил.
двух угловых зеркал скреплено с корпусом одного из двук датчиков, пять зеркально-призменных узлов 16-20 и теодолит 21 с автоколлимационным окуляром. Кроме того, показана (фиг« 1) труба 22 контролируемого телескопа и вспомогательное зеркало 23s укрепленное на валу 5 под углом 45 к его
оси. I
Коллиматор образован объективом 2 с подсвечиваемой маркой 3 и зеркалом 12, расположенным от марки на
расстоянии f/2 и ориентированным перпендикулярно оси объектива, где f- фокусное расстояние объектива 2 Марка подсвечивается источником излучения (не показан) ,,
Корпус датчика 6 закреплен жестко на кронштейне 1 ось вала 8 этого датчика параллельна оси вращения вала 5 и кинематически с ним связана зеркало 12 расположено параллельно
оси вала 8 датчика, а зеркало 14 перпендикулярно ей. Корпус другого датчика 7 соединен с валом 5 и ориентирован своим валом 9 перпендикулярно валу 5, Зеркало 13 расположено
параллельно оси вала 9, а зеркало 15 перпендикулярно ей.
Базовое зеркало 4, теодолит 21 и зеркально-призменные узлы 17-20 расположены па основании (не показано). Зеркально-призменный узел 16 соединен с кронштейном 1 и обеспечивает оптическую связь коллиматора и трубы контролируемого телескопа.
Зеркально-призменные узлы 17 и 18 установлены между собой шарнирно и обеспечивают оптическую связь теодолита 21 с зеркалами Ю и 15, а зеркально-призменные узлы 19 и 20 обеспечивают оптическую связь теодо- лита с зеркалом 11. Оптическая связь теодолита с зеркалами 13 и 14 обеспечивается с помощью вспомогательного зеркала 23 и зеркально-призменных узлов 17 и 18.
Система работает следующим образом.
Перед работой с высокой точностью измеряют углы неперпендикулярности между зеркалами 13 и 15 одного углового зеркала и угол неперпендикулярности между зеркалами 12 и 14 другого углового зеркала. Затем кронштейн 1 крепят на трубе 22 конт
лита, по которым определяют угол и у непараллельности между зеркалами 10
ролируемого телескопа так, что в цен-30 от них автоколлимационного изображе- тре поля трубы телескопа видна све- ния и снимают отсчеты по вертикаль- тящаяся марка 3 коллиматора. Затем ному и горизонтальному лимбам теодо- трубу телескопа поворачивают в любое заданное произвольное положение.
Система задает для контролируемо- 35 и 15 в измерительной плоскости, па- го телескопа образцовове визирное раллельной плоскости зеркала 13. По направление. Угловое отклонение Д между образцовым направлением и направлением визирования телескопа является погрешностью визирования те- 40
датчику 7 измеряют угол oij между зеркалами 11 и 13 (фиг.1), а по датчику 6 измеряют угол j между плоскими зеркалами 10 и 12.
лескопа.
Для контроля углов отклонения за- данного положения трубы от образцового определяют положение оптической оси коллиматора по датчикам углов поворота и величине смещения его изображения (Х,У) в фокальной плоскости телескопа по координатору. Дпя этого вал 5 с датчиком 7 разворачивают (например, вручную) до положения, при котором плоское зеркало 15 становится вертикальным. Ось вала 9 датчика 7 в данном положении трубы телескопа поворачивают (например, вручную) так,чтобы зеркало 11 встало вертикально. Теодолит 21 через узлы 19 и 20 наводят на зеркало 11 до получения автоколлимационного
изображения от этого зеркала и по его вертикальному кругу снимают отсчеты, по которым определяют угол а/ отклонения зеркала 11 от вертикальной плоскости. Через узлы 17 и 18 теодолит наводят на зеркало 15 до получения от него автоколлимационного изображения и снимают отсчеты по вертикальному и горизонтальному кругам, затем переводят теодолит 21 на
5
зеркало 4 до получения автоколлимационного изображения и снимают отсчет по горизонтальному лимбу теодолита.
По разности отсчетов вычисляют углы У| , р., поворота зеркала 15 относительно зеркала 4 в горизонтальной и вертикальной плоскостях. После этого теодолит 21 через зеркально-призменные узлы 17 и 18 переводят на зеркала 13 и 14 до получения автоколлимационных изображений первоначально от зеркала 13, а затем от зеркала 14, снимая каждый раз отсчеты по вертикальному и горизонтально- му лимбам теодолита. По разности полученных отсчетов вычисляют углы Jj,.; непараллельности зеркал 13 и 14. Переводят теодолит 21 через узлы 17 и 18 на зеркала 10 до получения
0
лита, по которым определяют угол и у непараллельности между зеркалами 10
от них автоколлимационного изображе- ния и снимают отсчеты по вертикаль- ному и горизонтальному лимбам теодо-
и 15 в измерительной плоскости, па- раллельной плоскости зеркала 13. По
датчику 7 измеряют угол oij между зеркалами 11 и 13 (фиг.1), а по датчику 6 измеряют угол j между плоскими зеркалами 10 и 12.
Проводят отсчеты по координатору значения координаты изображения марки коллиматора (Х,У) в поле зрения телескопа.
По датчикам телескопа, например по лимбам для данного положения трубы, снимают углы поворота его осей f,, г, ЕЗ определяют погрешность угла отклонения телескопа из следующей зависимости:
J. А Ч
где U
-J - р- - , |- -|V/3s-/i X cos(yi,-(f, + У,-Г) - sincCj, х - fr . sin/3,+{e, +oi,-b + ,- f- )cosp,-J,.sinp,-(, +y,-r) Cosci,.sLn/5,+ + sin od j- sin 8 :
Г - угол межл, направлением телескопа н осью X в плоскости горизонта, т.е привязка телескопа по азимуту; , ,2.1 отсчеты по лимбам
или цифровым датчикам телескопа; f - фокусное расстояние
объектива трубы телескопа ,
Формула изобретения
Система для определения погрешности направления визирования телескопа содержащая основание, кронштейн и коллиматор, соединенный с кронштейном и выполненный из объектива и марки, отличающаяся тем, что, с целью расширения эксплуатационных возможностей за счет определения погрешности направления визирования телескопа для произвольного положения трубы, она снабжена зеркалом и теодолитом с автоколли чационным окулятором, установленнь1 на основании, пятью зеркально-приз6-fШ I ll . - HiIS го
15 -, . ,/
Редактор Н.Тупица
(риг 2 17 21 Составитель М.Солоухин Техред М.Дг-щык Корректор Л .пипенко
мснными узлами коллинеарного перекоса лучей, несущим валом и двумя датчиками углов поворота коллиматора, каждый из которь х включает корпус,
вал вращения, установленный в корпусе, зеркало,, устан(звленное на валу параллельно его оси, и угловое зеркало, устанозленно( на корпусе и ориентирова))ное так, что одна грань
параллельна оси ва.ча, а другая перпендикулярна ей, один из датчиков соединен своим корпусом с несущим залом и ориентирован так, что ось его вала перпендикулярна оси вращения несущего вала, а второй датчик соединен своим корпусом с кронштейном, кинематически связан с несущим залом и ось его вала расположена параллельно оси вращения несущего вала, марка коллиматора нанесена на поверхность объектР5ва в его главной точке и расположена на расстоянии, равном половине фокусного расстояния от грани углового зеркала второго
датчика, один из зеркально-призмен- пых узлов соединен с кронштейном и (зриентирован перпендикулярно оптической оси коллиматора, а четьфе дру гих зеркально-призмекных узла установлены на основании попарно между зеркалом соответствующего датчика и телескопом, д г
Заказ 4039/34 676Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул .Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАЦИОННЫЙ ТЕОДОЛИТ | 1995 |
|
RU2106600C1 |
| СПОСОБ ЮСТИРОВКИ КОНТРОЛЬНОГО ЭЛЕМЕНТА ЛИНИИ ВИЗИРОВАНИЯ ОБЪЕКТИВА | 2014 |
|
RU2606795C2 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Способ взаимного ориентирования осей вращения трех теодолитов | 1985 |
|
SU1318786A1 |
| Маркшейдерский гирокомпас | 1990 |
|
SU1808119A3 |
| Способ определения погрешностей изготовления прямых двугранных углов зеркально-призменных элементов и устройство для его осуществления | 1977 |
|
SU693110A1 |
| Телескоп | 1984 |
|
SU1246041A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗМУЩЕНИЙ И БИЕНИЙ ВЕРТИКАЛЬНОЙ ОСИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА | 2013 |
|
RU2530451C1 |
| СПОСОБ ЮСТИРОВКИ ПЛОСКОГО ФАЦЕТНОГО ЗЕРКАЛА | 1984 |
|
RU1356784C |
| Магнитный теодолит | 1946 |
|
SU74969A1 |
Изобретение может быть использовано для проверки тдчности визирования крупногабаритных телескопов в заданное направление. Пелью изоб(Л WU2.f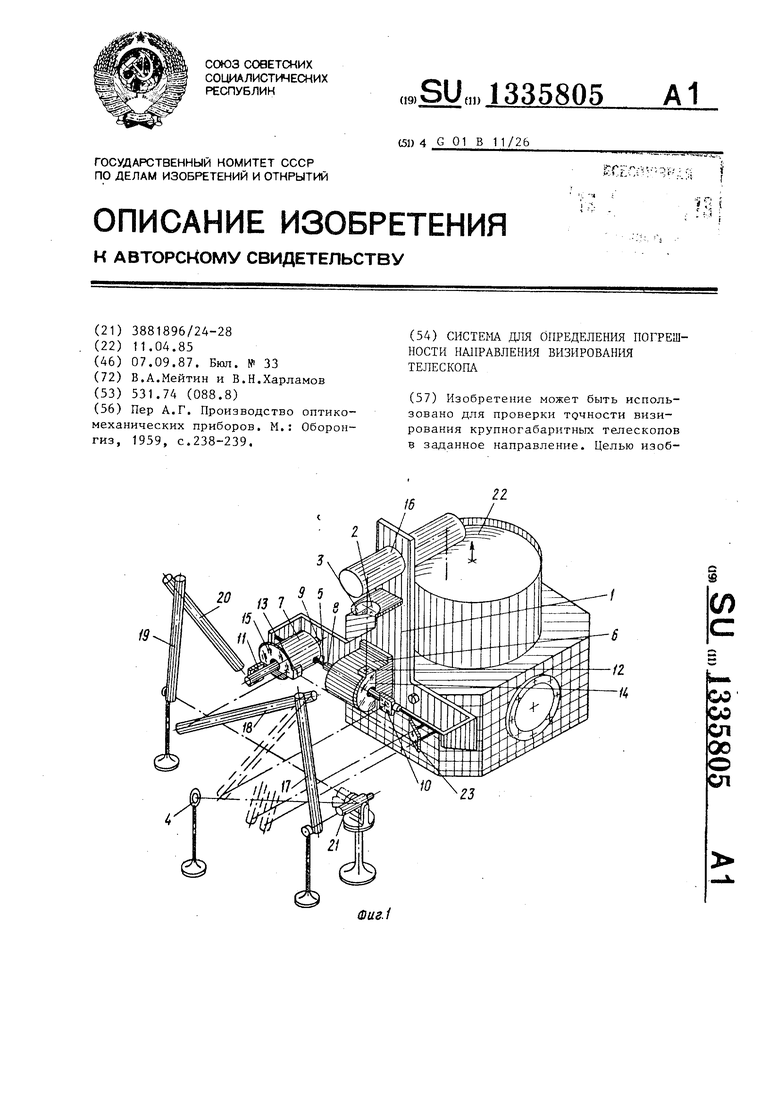
| Пер А.Г | |||
| Производство оптико- механических приборов | |||
| М.: Оборонгиз,1959, с.238-239. |
