Изобретение относится к системам с мобильным роботом, в частности к системе с мобильным роботом, содержащей мобильный робот для перемещения и сбора данных и отдельный управляющий компьютер для обработки данных.
Мобильный робот и управляющий компьютер соединены друг с другом посредством высокочастотного ВЧ-модуля для приема и передачи данных.
Как правило, мобильный робот обладает функциями, позволяющими ему передвигаться самостоятельно и обходить препятствия без внешней помощи. Блок-схема, представленная на фиг.1, иллюстрирует различные составные части мобильного робота.
Как показано на фиг.1, мобильный робот содержит перемещающее устройство 30 для перемещения робота, устройство 40 обнаружения препятствия для обнаружения наличия препятствия на пути робота, устройство 20 определения местоположения для определения текущего местоположения робота, контроллер 10 для управления действиями робота и источник 60 электропитания для аккумуляции электроэнергии и питания соответствующих компонентов мобильного робота.
Работа этого мобильного робота подробно описана ниже.
Получив команду "Пуск", контроллер 10 мобильного робота 1 приводится в исходное состояние и передает команду запуска устройству 20 и устройству 40. Получив команду запуска от контроллера 10, устройство 20 и устройство 40 приводят в действие обзорные телекамеры соответственно 21 и 43 для фиксации изображения. После того как изображение зафиксировано, видеоплаты 23 и 45 устройства 20 и устройства 40 осуществляют пороговую обработку или прореживание, чтобы по возможности уменьшить объем данных. Затем данные передаются на котроллер 10. Получив данные об объекте от устройства 20 и устройства 40, контроллер 10 обрабатывает данные об объекте с помощью видеопроцессора 11, распознает текущее положение мобильного робота 1, определяет наличие препятствия на его пути и запускает устройство 30. Так как описанные выше процессы непрерывно осуществляются во время работы мобильного робота 1, он может выполнять заданную работу, не сталкиваясь ни с какими препятствиями.
Для получения изображений объектов с тем, чтобы способствовать определению роботом 1 своего местоположения и установлению наличия препятствий, используют обзорные телекамеры на основе ПЗС (приборов с зарядовой связью) 21 и 43. Данные об изображении, полученном телекамерами 21 и 43, обычно настолько громоздки, что не могут быть использованы в первоначальном виде. Таким образом, объем этих данных должен быть уменьшен соответствующими способами, такими как пороговая обработка и прореживание. Эти процессы обычно выполняют видеоплаты 23 и 45, каждая из которых имеет процессор для обработки видеоданных. В видеоплатах 23 и 45 данные преобразуют в видеоданные, и видеопроцессор 11 контроллера 10 на основании этих данных определяет текущее положение мобильного робота 1, а также форму препятствия и расстояние до него.
Так как устройства для обработки изображений, полученных телекамерами 21 и 43, должны быть установлены в корпусе мобильного робота, недостатком такого робота является его громоздкость.
Кроме того, дистанционным управлением обычного мобильного робота подают только команды пуска и останова. Учитывая существующий широкий интерес к бытовой технике, управляемой через Интернет, обычный мобильной робот, не управляемый через Интернет, менее привлекателен для потенциальных потребителей.
Целью настоящего изобретения является преодоление упомянутых недостатков известных на данный момент устройств. Задачей настоящего изобретения является создание компактной системы с мобильным роботом, управляемым через Интернет. Этой цели достигают подсоединением автоматически перемещающегося мобильного робота к компьютеру, подключенному к Интернет. Видеоданные, полученные с мобильного робота, обрабатываются компьютером при помощи беспроводной связи с использованием ВЧ-модуля.
Указанная задача достигается тем, что создана предлагаемая система с мобильным роботом, содержащая устройство перемещения для перемещения робота по помещению, устройство обнаружения препятствия для обнаружения определения наличия препятствия на пути робота, устройство определения местоположения для определения местоположения робота, первый приемопередатчик для приема и передачи сигнала управления устройствами перемещения, обнаружения препятствий и определения местоположения, и управляющий компьютер для обработки данных о сигнале с первого приемопередатчика и передачи управляющей команды мобильному роботу.
Управляющий компьютер содержит второй приемопередатчик для приема с первого приемопередатчика мобильного робота и передачи на него сигналов, видеоплату для обработки видеоданных, полученных с устройств обнаружения препятствия и определения местоположения при помощи первого приемопередатчика, и средства связи для связывания управляющего компьютера с Интернет.
Таким образом, создана компактная система с мобильным роботом и управляемая через Интернет.
Кроме того, мобильный робот может быть снабжен пылесосом, имеющим всасывающее отверстие для всасывания мусора, пылесборник для сбора мусора и двигатель для создания всасывающей тяги. Мобильный робот может также быть укомплектован обзорной телекамерой для наблюдения за помещением. Следовательно, систему с мобильным роботом, выполненную с использованием ВЧ-модуля, можно использовать как для уборки, так и для охраны.
Вышеперечисленные и другие задачи и преимущества настоящего изобретения с очевидностью следуют из его подробного описания со ссылками на прилагаемые чертежи, на которых:
фиг. 1 изображает блок-схему, иллюстрирующую работу обычного мобильного робота;
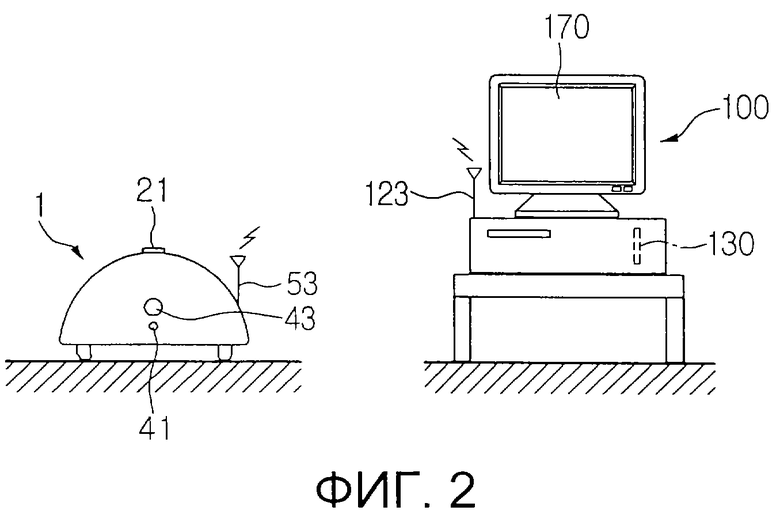
фиг. 2 схематически изображает предлагаемую систему с мобильным роботом, выполненную с использованием ВЧ-модуля;
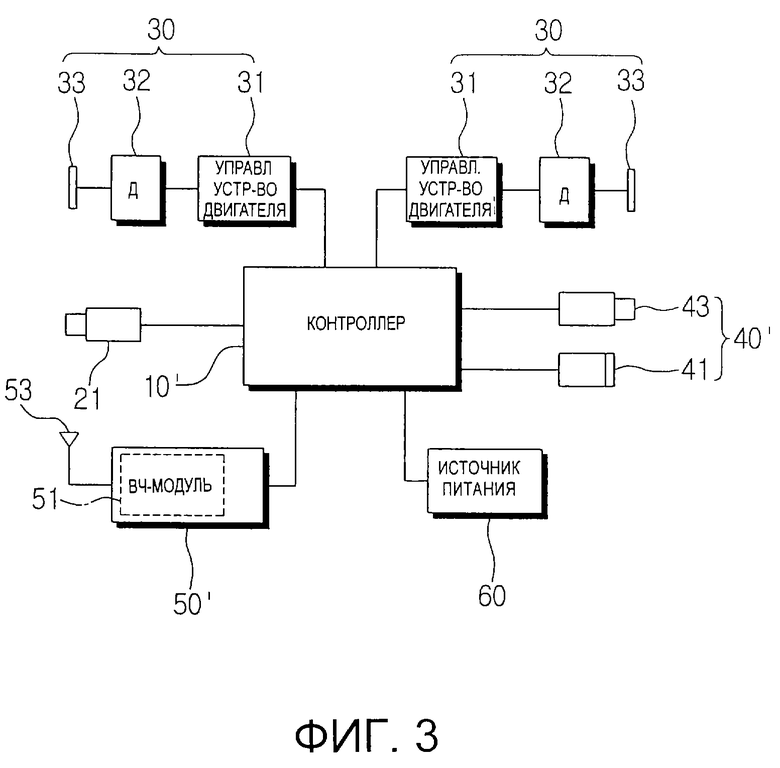
фиг. 3 изображает блок-схему, иллюстрирующую работу мобильного робота, изображенного на фиг.2;
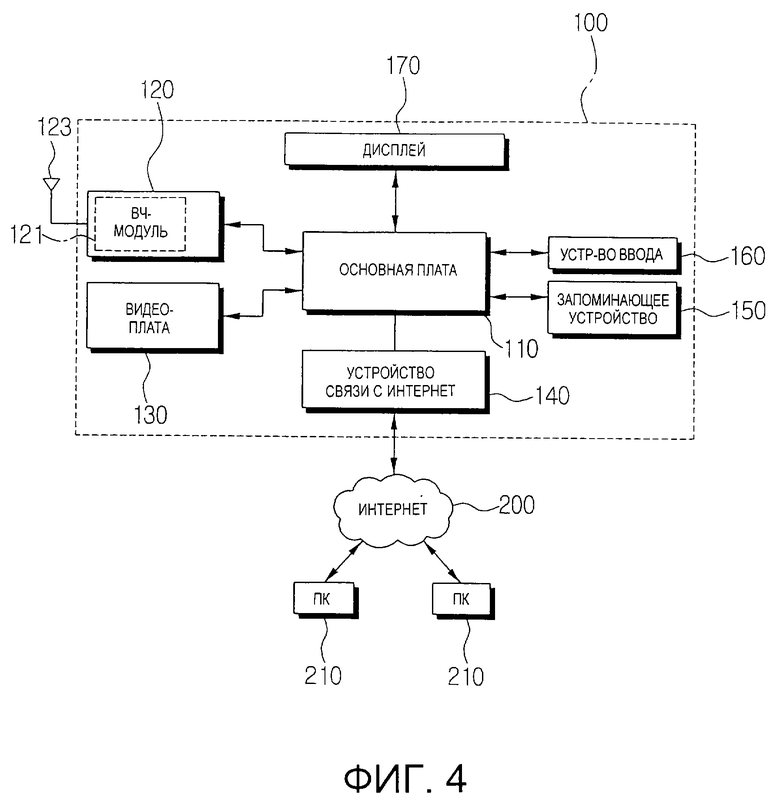
фиг. 4 изображает блок-схему, иллюстрирующую работу управляющего компьютера мобильного робота, представленного на фиг.2; и
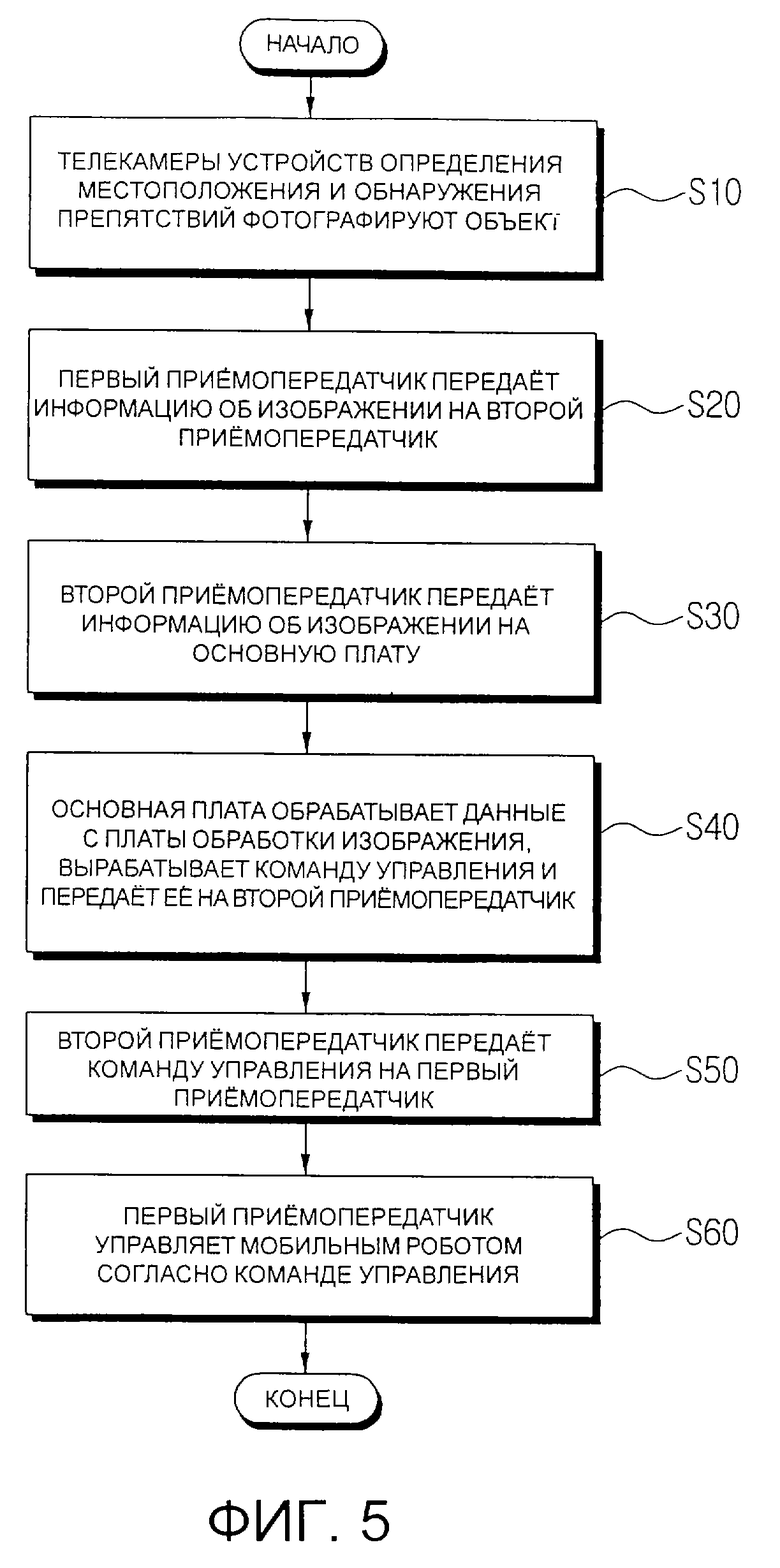
фиг. 5 изображает блок-схему алгоритма работы предлагаемой мобильной робототехнической системы с ВЧ-модулем.
Предпочтительный вариант выполнения настоящего изобретения описан ниже со ссылками на прилагаемые чертежи, на которых одинаковые элементы обозначены одинаковыми номерами.
Как показано на фиг.2 и 3, предлагаемая система с мобильным роботом, выполненная с использованием ВЧ-модуля, согласно настоящему изобретению включает мобильный робот 1 и управляющий компьютер 100.
Мобильный робот 1 включает устройство перемещения 30 для перемещения мобильного робота 1 по помещению, устройство определения местоположения с телекамерой 21 для определения текущего местоположения мобильного робота 1, устройство обнаружения препятствий 40' для определения наличия препятствия на пути мобильного робота 1, первый приемопередатчик 50' для передачи видеоданных на управляющий компьютер 100 и приема данных, поступающих от этого компьютера, контроллер 10' для управления соответствующими компонентами мобильного робота 1 согласно инструкциям управляющего компьютера 100 и источник электропитания 60 для аккумуляции электроэнергии и питания соответствующих компонентов мобильного робота.
Устройство 30 содержит два колеса 33, выполненных с возможностью перемещения вперед, назад, влево и вправо, двигатель 32 для привода колес 33 и управляющее устройство 31 двигателя для управления соответствующим двигателем 32 в соответствии с сигналами контроллера 10'.
Устройство 40' содержит линейный лазер 41 для излучения прямолинейных пучков света по направлению перемещения мобильного робота 1 и телекамеру 43 для распознавания лучей, отраженных от препятствия на его пути. Линейным лазером 41 и телекамерой 43 управляет контроллер 10'.
Первый приемопередатчик 50' содержит ВЧ-модуль 51 и антенну 53 и подсоединен к контроллеру 10' для передачи изображений, полученных телекамерами 21 и 43 соответственно устройства определения местоположения и устройства обнаружения препятствия 40'. Кроме того, первый приемопередатчик 50' получает команду запуска от управляющего компьютера 100.
Источник 60 питания представляет собой аккумуляторную батарею, накапливающую заданный уровень электроэнергии и питающую соответствующие части мобильного робота, когда это необходимо.
Управляющий компьютер 100 содержит второй приемопередатчик 120 для передачи данных на мобильный робот 1 и приема данных, поступающих от него, видеоплату 130 для обработки видеоданных, полученных с мобильного робота 1, средства 140 связи с Интернет для связывания управляющего компьютера 100 с Интернет 200, запоминающее устройство 150 для хранения данных, обеспечивающих работу программного обеспечения управляющего компьютера 100, устройство 160 ввода для ввода необходимых данных в управляющий компьютер 100, основную плату 110 для общего управления соответствующими частями управляющего компьютера 100 и дисплей 170 для индикации результатов, полученных с основной платы 110.
Второй приемопередатчик 120 содержит ВЧ-модуль 121 и антенну 123. Второй приемопередатчик передает данные с первого приемопередатчика 50' мобильного робота 1 на основную плату 110 и команды с основной платы 110 управляющего компьютера 100 на мобильный робот 1.
Видеоплата 130 выполнена в виде карты, вставляемой в разъем управляющего компьютера 100. Видеоплата 130 обрабатывает видеоданные, поступающие с мобильного робота 1, что позволяет основной плате 110 вычислить текущее местоположение мобильного робота 1 и определить форму любого препятствия, вычислив расстояние до него и т.д. Более конкретно, видеоплата 130 производит пороговую обработку видеоданных, поступающих с телекамеры 21 устройства определения местоположения, и передает их на основную плату 110. Далее, видеоданные о прямолинейном пучке света линейного лазера 41, зафиксированные телекамерой 43 устройства 40', передают на основную плату после пороговой обработки и прореживания.
Дисплей 170, устройство ввода 160, запоминающее устройство 150 и основная плата 110 управляющего компьютера 100 идентичны устройствам обычного персонального компьютера. Далее, устройство связи с Интернет 140 связывает управляющий компьютер 100 с Интернет через внутренний кабель или модем подобно тому, как связан с Интернет обычный компьютер. Поэтому подробное описание связи с Интернет здесь опущено.
Работа системы с мобильным роботом, выполненной с использованием ВЧ-модуля, описана далее со ссылками на фиг.5.
Сначала мобильный робот 1 получает команду запуска с управляющего компьютера 100. Команда запуска передается мобильному роботу 1 первым приемопередатчиком 50'. В ответ на команду запуска контроллер 10' приводится в исходное состояние и посылает команду зафиксировать изображение устройству определения местоположения и устройству обнаружения препятствия 40'. Получив команду от контроллера 10', телекамера 21 устройства определения местоположения производит съемку потолка, на котором установлена базовая отметка. Лазер 41 устройства 40' излучает прямолинейный пучок света, а телекамера 43 распознает отраженный пучок света и формирует изображение объекта, находящегося на его пути (шаг S10).
Контроллер 10' передает изображения, сформированные устройством 40' и телекамерой 21, на второй приемопередатчик 120 управляющего компьютера 100 при помощи ВЧ-модуля 51 и антенны 53 первого приемопередатчика 50' (шаг S20).
Второй приемопередатчик 120 управляющего компьютера 100 принимает изображения с первого приемопередатчика 50' мобильного робота 1 и передает их на основную плату 110. Затем основная плата 110 отправляет изображения на видеоплату 130 для обработки. Видеоплата 130 производит пороговую обработку и прореживание изображений, полученных телекамерами 21 и 43 соответственно устройства определения местоположения и устройства обнаружения препятствий 40', и отправляет видеоданные, полученные в результате этой обработки, обратно на основную плату 110 (шаг S30).
После получения с устройства определения местоположения видеоданных, обработанных платой 130, основная плата 110 получает координаты базовой отметки, например, при помощи региональной корреляции и определяет текущее местоположение мобильного робота 1. Далее, используя видеоданные с устройства 40', основная плата 110 вычисляет расстояние между мобильным роботом 1 и любым препятствием и определяет конфигурацию препятствия. После определения целевого положения мобильного робота 1 и параметров препятствия перед ним основная плата обобщает информацию, вырабатывает управляющие команды мобильному роботу 1, например остановиться или двигаться, и посылает управляющую команду второму приемопередатчику 120 (шаг S40).
Второй приемопередатчик 120 передает управляющую команду основной платы 110 на первый приемопередатчик 50' мобильного робота 1 посредством ВЧ-модуля 121 и антенны 123 (шаг S50).
Первый приемопередатчик 50' мобильного робота 1 получает управляющую команду с управляющего компьютера 100 и передает ее на контроллер 10' мобильного робота 1. Затем контроллер 10' приводит в действие мобильный робот 1, при этом управляя устройством определения местоположения и устройством обнаружения препятствий 40' согласно полученной им управляющей команде (шаг S60).
Так как упомянутые процессы периодически повторяются через заданные временные интервалы, мобильный робот может выполнять заданные операции под контролем управляющего компьютера 100.
Кроме того, так как управляющий компьютер 100 связан с Интернет 200 средствами связи 140, пользователь может управлять мобильным роботом 1, не только находясь в одном с ним помещении, но и находясь на расстоянии, используя еще один компьютер 210. Таким образом, связав компьютер 210 с Интернет и с управляющим компьютером 100, пользователь может работать с программой мобильного робота, установленной в управляющем компьютере 100, и дистанционно управлять роботом.
Мобильный робот 1, работающий как описано выше, может быть оснащен дополнительными устройствами для выполнения требуемых работ.
Например, для уборки мобильный робот может быть укомплектован пылесосом, имеющим всасывающее отверстие для всасывания мусора, пылесборник для сбора мусора и двигатель для создания всасывающей тяги. Такой мобильный робот 1 может производить уборку заданной территории в автоматическом режиме.
С целью охраны дома от возможного вторжения или для охраны детей мобильный робот 1 может быть укомплектован обзорной телекамерой наблюдения, что позволит пользователю в реальном времени наблюдать за происходящим в доме и вокруг него. Так как в настоящее время на рынке представлены только стационарные телекамеры наблюдения с ограниченной территорией обзора, преимуществом мобильного робота 1 является возможность наблюдения за любым уголком дома.
Как описано выше, предлагаемая система с мобильным роботом, выполненная с использованием ВЧ-модуля, имеет небольшие размеры, так как громоздкие компоненты, такие как видеоплата для обработки видеоданных, в мобильном роботе 1 отсутствуют. Более того, предлагаемая система дает пользователю больше возможностей для дистанционного управления, так как пользователь может управлять роботом через Интернет.
Предпочтительный пример реализации изложен и описан выше. Тем не менее следует иметь в виду, что настоящее изобретение не ограничивается этим примером.
В рамках представленной ниже формулы изобретения специалистами могут быть выполнены различные изменения и модификации.
Изобретение относится к системам с мобильным роботом. Система содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия на пути мобильного робота, устройство для определения местоположения мобильного робота, первый приемопередатчик, содержащий ВЧ-модуль, для передачи и приема сигнала для управления устройством для перемещения мобильного робота, устройством для обнаружения препятствий и устройством для определения местоположения, и управляющий компьютер для обработки данных о сигнале с первого приемопередатчика и передачи управляющей команды на мобильный робот, причем управляющий компьютер содержит средства связи для связывания компьютера с Интернет. Управляющий компьютер содержит второй приемопередатчик, содержащий ВЧ-модуль, для передачи сигнала на первый приемопередатчик мобильного робота и приема сигнала с этого приемопередатчика, видеоплату для обработки видеоданных, полученных при помощи первого приемопередатчика от устройства обнаружения препятствия и устройства определения местоположения. Мобильный робот содержит пылесос, включающий всасывающее отверстие для всасывания мусора, пылесборник для сбора мусора и двигатель для создания всасывающей тяги. Мобильный робот дополнительно содержит обзорную телекамеру наблюдения. 3 з.п. ф-лы, 5 ил.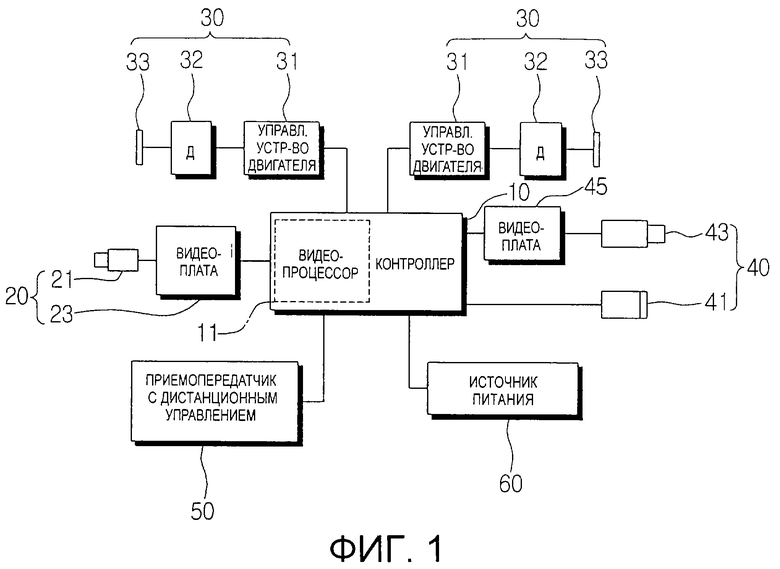
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| US 5219264, 15.06.1993 | |||
| US 5534762, 09.07.1996 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |

