Предлагаемое изобретение относится к области робототехники и предназначено для управления движением адаптивного робота, обладающего свойствами искусственного интеллекта.
Известно устройство, содержащее ведущую линию движения в виде светоотражающей полосы с разветвлениями, имеющую узловые пункты с опознавательными метками, передний датчик слежения за светоотражающей полосой, подключенный двумя выходами к первым двум входам блока рулевого привода, третий и четвертый входы которого соединены соответственно с первым и вторым выходами блока памяти команд, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым и третьим входами блока режимов движения, четвертый вход которого соединен с первым выходом блока сравнения кодов, второй выход которого соединен с первым входом блока памяти команд, второй вход которого соединен с выходом счетчика команд, три выхода блока режимов движения соединены с тремя входами блока рулевого привода. Один из выходов пульта управления соединен с первым входом блока памяти кодовых идентификаторов, второй вход которого соединен с выходом счетчика команд, а выход - с первым входом блока сравнения кодов, второй и третий входы которого соединены соответственно с выходами переднего и заднего датчиков кодовых идентификаторов, первые входы которых соединены с соответствующими выходами блока переключения датчиков слежения и датчиков кодовых идентификаторов и с входами соответственно переднего и заднего датчиков слежения за светоотражающей полосой, выходы заднего датчика слежения за светоотражающей полосой соединены с пятым и шестым входами блока рулевого привода и с первым и вторым входами блока выделения меток, третий и четвертый входы которого соединены с выходами переднего датчика слежения за светоотражающей полосой, пятый вход блока выделения меток соединен с первым выходом блока режимов движения, один из выходов блока выделения меток соединен с входом счетчика команд и вторыми входами переднего и заднего датчиков кодового идентификатора, другой выход блока выделения меток соединен с пятым входом блока режимов движения и одновременно с первым входом блока аварийной сигнализации, второй вход которого соединен с первым выходом блока сравнения кодов, второй выход пульта управления соединен с третьим входом блока памяти команд, четвертый выход которого соединен с входами блока переключения датчиков слежения и датчиков кодовых идентификаторов (см. МПК 5 G 05 D 1/02, Гусев А.И., Порозов Б. Ю., Войнов В.В., патент РФ N 2018902, регистрационный номер заявки - 4942112/24, опубликовано - БИ N 16-1994 г.).
Известное устройство, так же как и заявляемое, обеспечивает автоматическое достижение целевого объекта автономным мобильным роботом.
Признаков аналога, общих с заявленным техническим решением, не обнаружено.
Недостатком устройства является необходимость предварительной прокладки маршрутов движения и нанесения идентификационных меток.
Следующие причины препятствуют достижению технического результата:
1. Блок сенсорных датчиков данного аналога состоит из переднего и заднего датчиков слежения за светоотражающей полосой и датчиков кодовых идентификаторов. Данное обстоятельство не обеспечивает полного восприятия внешней среды, так как датчики настроены на восприятие только светоотражающей полосы.
2. Структура системы управления не позволяет реализовать адаптивное поведение автономного робота в априори неформализованной среде, поскольку она рассчитана на решение формализованной задачи перемещения мобильного робота по светоотражающей полосе.
Известно устройство, обеспечивающее автоматизированный выбор оптимального маршрута маневра разнотипных транспортных средств по автодорожной сети с учетом их характеристик таких, как масса, длина, ширина, высота, а также эксплуатационного состояния элементов трассы (см. МПК 6 G 06 F 17/16, Манеркин В. П. , Кушнарев А.С., Борисович А.В., Панкрушин П.Н., патент РФ N 2045773, регистрационный номер заявки - 92001141/24, опубликовано - БИ N 28-1995 г.).
Решение задачи выбора оптимального маршрута движения транспортного средства сводится к последовательному однократному просмотру в блоке адресной памяти описаний всех транспортных петель, связывающих заданные станции, последовательному отбору кратчайшего по длине, приемлемого по грузогабаритным параметрам и коэффициенту эксплуатационной готовности. Устройство содержит блок адресной памяти кода станции, счетчик, четыре блока сравнения, сумматор, два регистра, первый элемент И, два триггера, элемент 2И-ИЛИ-НЕ, генератор импульсов, блок памяти характеристик трассы, коммутатор выбора и ввода, третий, четвертый, пятый, шестой и седьмой регистры, пятый и шестой блоки сравнения, второй элемент И, элемент НЕ, задатчик вероятности выхода из строя элемента трассы, генератор шума, умножитель, пороговый элемент, три ключа, источник постоянного напряжения и блок управления. Причем вход блока адресной памяти кода станции соединен с информационным выходом счетчика, первый выход блока адресной памяти кода станции соединен с первыми входами первого и второго блоков сравнения, а также с входом третьего блока сравнения, второй выход блока адресной памяти кода станции соединен с информационным входом сумматора, третий выход блока адресной памяти кода станции является информационным выходом устройства, вход разрешения записи счетчика соединен с прямым выходом первого триггера, группа установочных входов счетчика подключена к группе выходов младших разрядов первого регистра, выход сигнала переполнения счетчика соединен с входом установки в "1" первого триггера и с входом останова генератора импульсов, информационный выход счетчика соединен с информационным входом второго регистра, вторые входы первого и второго блоков сравнения являются информационными входами устройства, выход первого блока сравнения соединен с входом установки в "1" второго триггера, а также с входом разрешения записи второго регистра, выход второго блока сравнения соединен с первым входом первого элемента И и с входом установки в "0" первого триггера, выход третьего блока сравнения соединен с установочным входом сумматора и с входом установки в "0" второго триггера, первый вход четвертого блока сравнения соединен с выходом сумматора, второй вход - с выходом старшего разряда первого регистра, а выход четвертого блока сравнения соединен с вторым входом первого элемента И, третий вход которого соединен с выходом второго триггера, выход первого элемента И соединен с входом разрешения записи первого регистра, а синхронизирующий вход сумматора соединен с выходом второго триггера, выход сумматора соединен с информационным входом группы старших разрядов первого регистра, вход младшего разряда первого регистра соединен с выходом второго регистра, прямой выход первого триггера соединен с первым входом элемента 2И-ИЛИ-НЕ и с первым входом устройства, инверсный выход первого триггера соединен с вторым входом элемента 2И-ИЛИ-НЕ, третий вход которого соединен с выходом генератора импульсов, а четвертый вход является входом устройства для запросов выдачи кодов маршрутов от внешнего устройства, выход элемента 2И-ИЛИ-НЕ соединен со счетным входом счетчика, вход запуска генератора соединен с шиной запуска устройства. Первой группой информационных входов устройства являются вторые входы первого и второго блоков сравнения, второй группой информационных входов устройства является группа входов блока памяти характеристик трассы, выход генератора импульсов соединен с входом задатчика вероятностей выхода из строя элемента трассы и с управляющим входом второго ключа, вход разрешения записи счетчика соединен с выходом первого ключа, выход первого блока сравнения соединен с входом установки в "1" второго триггера, а также с входом разрешения записи второго, четвертого, пятого, шестого и седьмого регистров, выход элемента НЕ соединен с первым входом третьего регистра, с установочными входами второго триггера и сумматора, второй вход блока памяти характеристик трассы подключен к выходу третьего регистра, стробирующий вход которого соединен с вторым выходом блока управления, выходы четвертого, пятого, шестого и седьмого регистров соединены с соответствующими входами пятого и шестого блоков сравнения, выходы которых подключены соответственно к первому и второму входам второго элемента И, выход которого соединен с информационным входом первого ключа, выход второго элемента И через элемент НЕ подключен к информационному входу второго ключа, а выход - к четвертому входу элемента 2И-ИЛИ-НЕ, прямой выход первого триггера подключен к второму входу третьего регистра, выход генератора шума соединен через умножитель с первым входом порогового элемента, второй вход которого подключен к второму входу задатчика вероятности выхода из строя элемента трассы и к источнику постоянного напряжения, а выход - к управляющему входу третьего ключа, информационный вход которого соединен с первым выходом коммутатора выбора и ввода и с третьим входом задатчика вероятности выхода из строя элемента трассы, выход которого подключен к второму входу умножителя, первый выход блока памяти характеристик трассы подключен к вторым входам четвертого и шестого регистров, а второй выход - к вторым входам пятого и седьмого регистров, выход второго триггера подключен к управляющему входу первого ключа.
Известное устройство, так же как и заявляемое, обеспечивает автоматическое достижение целевого объекта автономным мобильным роботом.
Признаков аналога, общих с заявленным техническим решением, не обнаружено.
Недостатком устройства является невозможность движения в априори неформализованной среде, так как выбор оптимального маршрута движения транспортного средства заключается в последовательном переборе всех допустимых маршрутов движения, зафиксированных в блоке адресной памяти.
Причиной, препятствующей достижению технического результата, является наличие адресной памяти, в которой содержится описание всех транспортных петель. Данное обстоятельство не позволяет реализовать адаптивное поведение автономного робота в априори неформализованной среде.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому изобретению является известное устройство для управления движением адаптивного робота, выбранное в качестве прототипа (см. МПК 2 B 25 J 9/00, авторское свидетельство СССР N 716807, Каляев А.В., Чернухин Ю.В., Носков В. П., опубликовано - БИ N 7,1980 г.). Указанное устройство содержит m-стабильный триггер, входы которого соединены с соответствующими выходами вычислительного блока, а выходы с соответствующими входами блока исполнительных устройств. Вычислительный блок содержит матрицу ключевых элементов размером k•m, входы которых соединены с соответствующими выходами блока формирования модели внешней среды, входы которого подключены к выходам блока сенсорных датчиков дистантного восприятия внешней среды.
Признаками прототипа, общими с заявленным устройством, являются последовательно соединенные блок сенсорных датчиков, блок формирования модели внешней среды, вычислительный блок, m-стабильный триггер и блок исполнительных устройств.
Недостатком прототипа является то, что это устройство не обеспечивает выбор оптимального направления движения к цели, находящейся за пределами области восприятия сенсорных датчиков дистантного типа.
Причина, препятствующая достижению технического результата, заключается в том, что определение множества допустимых траекторий движения осуществляется на структуре афферентного синтеза, отображающей только ту часть внешней среды, которая воспринимается блоком сенсорных датчиков.
Задачей, на решение которой направлено предлагаемое изобретение, является поиск и достижение цели, находящейся за пределами области дистантного восприятия робота. Под процедурой поиска цели понимается организация поведения мобильного робота, направленная на захват цели блоком сенсорных датчиков робота.
Технический результат, достигаемый при использовании предлагаемого технического решения, заключается в обеспечении эффективного достижения мобильным роботом цели, находящейся за пределами области дистантного восприятия блока сенсорных датчиков.
Технический результат достигается тем, что в известное устройство для управления движением адаптивного робота, содержащее последовательно соединенные блок сенсорных датчиков, блок формирования модели внешней среды, вычислительный блок, m-стабильный триггер и блок исполнительных устройств, вводятся управляющая ЭВМ, блок задания координат цели и собственного положения робота, блок дополнительных ключевых элементов, содержащий радиальный слой дополнительных ключевых элементов, дополняющих матрицу ключевых элементов размером k•m до матрицы размером (k+1)•m, и боковой слой дополнительных ключевых элементов, коммуникационные входы/выходы ключевых элементов радиального слоя дополнительных ключевых элементов подключены к коммуникационным выходам/входам ключевых элементов вычислительного блока, расположенных в первой строке матрицы ключевых элементов размером k•m, коммуникационные выходы дополнительных ключевых элементов бокового слоя подключены к коммуникационным входам ключевых элементов вычислительного блока, расположенных в первом и m-ом столбцах матрицы ключевых элементов размером k•m, коммуникационные выходы дополнительных ключевых элементов бокового слоя, соответствующих первой строке матрицы ключевых элементов размером k•m, подключены к радиальному слою дополнительных ключевых элементов, и блок формирования промежуточной цели, соединенный с выходами блока задания координат цели и собственного положения робота, с выходами блока формирования модели внешней среды и с группой выходов блока исполнительных устройств.
Доказательство наличия причинно-следственной связи между достигаемым техническим результатом и заявляемыми признаками заключается в следующем. Управляющая ЭВМ служит для задания координат начального расположения робота и цели. Блок дополнительных ключевых элементов, соединенный с ключевыми элементами вычислительного блока, служит для отображения пространства, не воспринимаемого блоком сенсорных датчиков, и формирования в нем промежуточной цели по сигналам от блока формирования промежуточной цели в случае, если истинная цель не попадает в область дистантного восприятия сенсорных датчиков. Таким образом, мобильный робот осуществляет перемещение к промежуточной цели до тех пор, пока истинная цель не попадет в область дистантного восприятия сенсорных датчиков.
Пример реализации заявляемого устройства управления адаптивным мобильным роботом иллюстрируется чертежами: на фиг. 1 представлена структурная схема устройства управления адаптивным мобильным роботом, на фиг. 2 - функциональная схема ключевого элемента вычислительного блока, на фиг. 3 - функциональные схемы ключевого элемента радиального слоя и ключевого элемента бокового слоя блока дополнительных ключевых элементов, на фиг. 4, 5 представлены функциональные схемы блока задания координат цели и собственного положения робота и блока формирования промежуточной цели.
Основные блоки заявляемого устройства управления адаптивным мобильным роботом (см. фиг. 1) следующие: 1 - управляющая ЭВМ (УЭВМ), 2 - блок сенсорных датчиков (БСД), 3 - блок формирования модели внешней среды (БФМВС), 4 - блок задания координат цели и собственного положения робота (БЗК), 5 - блок формирования промежуточной цели (БФПЦ), 6 - вычислительный блок (ВБ), 7 - ключевой элемент вычислительного блока (КЭ), 8 - радиальный слой дополнительных ключевых элементов (РСДКЭ), 9 - ключевой элемент радиального слоя (РКЭ), 10 - левый боковой слой дополнительных ключевых элементов (ЛСДКЭ), 11 - ключевой элемент бокового слоя (БКЭ), 12 - правый боковой слой дополнительных ключевых элементов (ПСДКЭ), 13 - m-стабильный триггер (ТР), 14 - блок исполнительных устройств (БИУ).
Устройство содержит управляющую ЭВМ 1. Выходы блока сенсорных датчиков 2 соединены с входами блока формирования внешней среды 3. Входы блока задания координат цели и собственного положения робота 4 соединены с выходами управляющей ЭВМ 1. Выходы блока формирования модели внешней среды 3 соединены с частью входов блока формирования промежуточной цели 5, другая часть входов которого соединена с выходами блока задания координат цели и собственного положения робота 4. Вычислительный блок 6 состоит из ключевых элементов вычислительного блока 7, входы установки которых соединены с выходами блока формирования модели внешней среды 3. Группа выходов DO2 блока формирования промежуточной цели 5 соединена с входами установки радиального слоя дополнительных ключевых элементов 8, который состоит из ключевых элементов радиального слоя 9. Коммуникационные входы/выходы ключевых элементов вычислительного блока 7 соединены с коммуникационными входами/выходами ключевых элементов радиального слоя 9. Группа выходов DO1 блока формирования промежуточной цели 5 соединена с входами установки левого бокового слоя дополнительных ключевых элементов 10, который состоит из ключевых элементов бокового слоя 11. Коммуникационные входы/выходы ключевых элементов вычислительного блока 7 соединены с коммуникационными входами/выходами ключевых элементов бокового слоя 11. Коммуникационные выходы ключевых элементов бокового слоя 11, расположенных в первой строке, соединены с коммуникационными входами ключевых элементов радиального слоя 9. Группа выходов DО3 блока формирования промежуточной цели 5 соединена с входами установки ключевых элементов бокового слоя 11 правого бокового слоя дополнительных ключевых элементов 12. Свободные коммуникационные выходы ключевых элементов 7 k-ой строки ключевых элементов вычислительного блока 6 соединены с входами m-стабильного триггера 13, выходы которого подключены к входам блока исполнительных устройств 14, выходы которого по шине B_BUS соединены с группой входов блока формирования промежуточной цели 5, а выход d - с блоком формирования модели внешней среды 3.
Функциональная схема ключевого элемента 7 (см. фиг. 2) содержит: элемент 5ИЛИ 15, четыре входа которого являются коммуникационными входами ключевого элемента 7, пятый вход является входом установки b1 а выход соединен с входом элемента 2И 16, второй вход которого является входом установки b2, а выход разветвляется на четыре коммуникационных выхода ключевого элемента 7.
Функциональная схема ключевого элемента 9 радиального слоя дополнительных ключевых элементов (см. фиг. 3а) содержит элемент 4ИЛИ, три входа которого являются коммуникационными входами ключевого элемента 9, а четвертый вход - сигналом установки b1, выход разветвляется на три коммуникационных выхода ключевого элемента 9.
Функциональная схема элемента 11 боковых слоев дополнительных элементов 10, 12 (см. фиг. 3б) содержит: элемент 2ИЛИ 18, один из входов которого является входом установки b1, второй - коммуникационным входом ключевого элемента 11, выход которого соединен с одним из входов элемента 2И 19, второй вход которого является входом установки b2, а выход разветвляется на два коммуникационных выхода ключевого элемента 11.
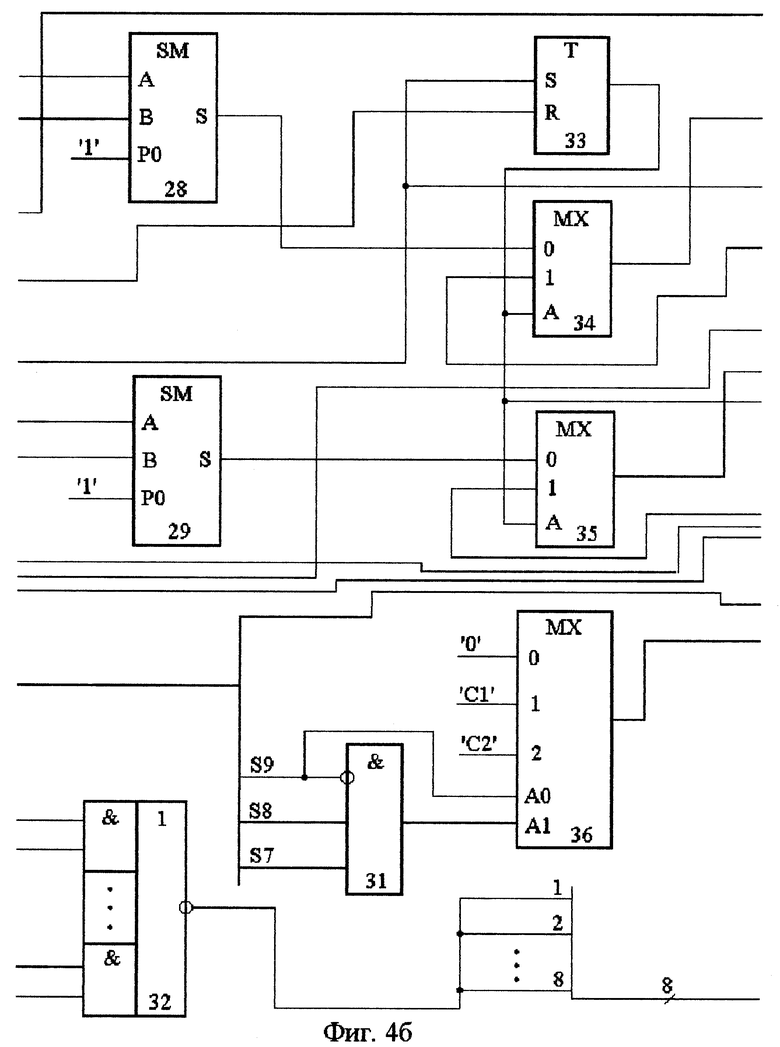
Функциональная схема блока задания координат цели и собственного положения робота 4 (см. фиг. 4) содержит блок формирования управляющих сигналов (БФУС) 20, входы которого соединены с восьмиразрядной шиной адреса A управляющей ЭВМ 1 и сигналом записи в устройство ввода/вывода -IOW шины управления ЭВМ 1, а выходы соединены с входами записи регистров 21-25, информационные входы которых соединены с шиной данных D управляющей ЭВМ 1, а выходы соединены с входами блока формирования промежуточной цели 5, который содержит две группы по восемь элементов НЕ 26, 27, входы которых соединены с группой выходов Q регистров 21, 23, соответственно. Группа входов A сумматора 28 соединена с выходами группы элементов НЕ 26, группа входов B сумматора 28 соединена с группой выходов Q регистра 22 блока задания координат цели и собственного положения робота 4, вход Po сумматора 28 соединен с линией сигнала логической единицы. Группа входов A сумматора 29 соединена с выходами группы элементов НЕ 27, группа входов B сумматора 29 соединена с группой выходов Q регистра 24 блока задания координат цели и собственного положения робота 4, вход Po сумматора 29 соединен с линией сигнала логической единицы. Вход Po сумматора 30 соединен с линией сигнала логического нуля, разряды 7, 8, 9 группы выходов S сумматора 30 соединены со входами элемента 3И 31. Входы элемента И-ИЛИ 32 соединены с линиями входных шин Dl1,.. . , DIm. Линия сигнала d шины B_BUS соединена с входом S триггера 33, вход R которого соединен с линией сигнала RES, а выход соединен с входом A мультиплексора 34 и входом A мультиплексора 35. Входы канала 0 мультиплексора 34 соединены с выходами сумматора 28. Входы канала 0 мультиплексора 35 соединены с выходами сумматора 29. Входы каналов 0, 1, 2 мультиплексора 36 соединены с линиями, на которых зафиксированы постоянные уровни сигналов, соответствующие константам "0", "C1" и "C2". Выход S9 сумматора 30 соединен с входом A0 мультиплексора 36, вход A1 которого соединен с выходом элемента 3И 31. Группа линий Xr шины B_BUS соединена с группой входов A сумматора 37, группа входов B которого соединена с выходами мультиплексора 34, а вход Po соединен с линией сигнала логического нуля. Группа линий Yr шины B_BUS соединена с группой входов A сумматора 38, группа входов B которого соединена с выходами мультиплексора 35, а вход Po соединен с линией сигнала логического нуля. Группа выходов S сумматора 30 соединена с группой входов A сумматора 39, группа входов B которого соединена с выходами мультиплексора 36, а вход Po соединен с линией сигнала логического нуля. Выход элемента И-ИЛИ 32 соединен со вторыми входами групп по восемь элементов 2И 40, 41. Группа выходов Q регистра 42 соединена с входами канала 1 мультиплексора 34 и первыми входами группы из восьми элементов 2И 41. Группа входов D регистра 42 соединена с группой выходов S сумматора 37. Линия сигнала d шины B_BUS соединена с входами C регистров 42, 43, 44. Группа выходов S сумматора 38 соединена с группой входов D регистра 43, группа выходов Q которого соединена с входами канала 1 мультиплексора 35 и первыми входами группы элементов 2И 40. Группа выходов S сумматора 39 соединена с группой входов D регистра 44, группа выходов Q которого соединена с входами канала 1 мультиплексора 45 и частью группы входов A ПЗУ 46. Группа выходов Q регистра 25 соединена с входами канала 0 мультиплексора 45, вход A которого соединен с выходом триггера 33, а выходы соединены с группой входов A сумматора 30, группа входов В которого соединена с группой линий Ar шины B_BUS. Выходы групп элементов 2И 40,41 соединены с частью группы входов A ПЗУ 46, группа выходов D которого разделена на три части, являющиеся выходными шинами DO1, DO2, DO3 блока формирования промежуточной цели 5.
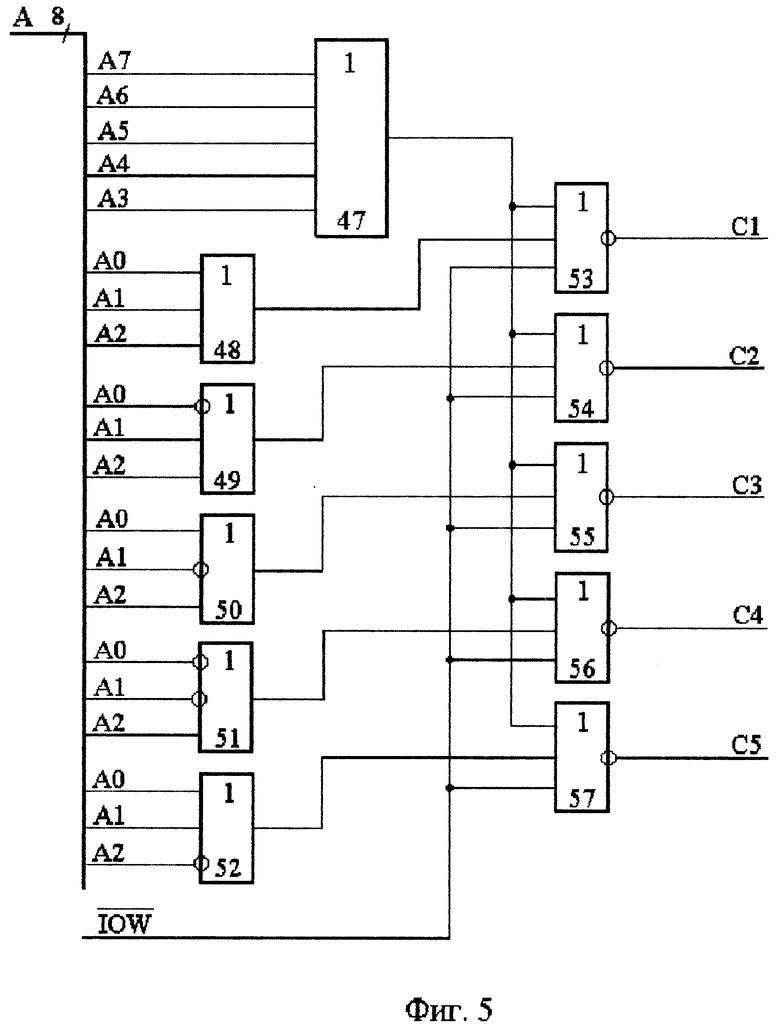
Функциональная схема блока формирования управляющих сигналов 20 (см. фиг. 5) содержит элемент 5ИЛИ 47, входы которого соединены с адресными линиями A3 - A7 шины адреса управляющей ЭВМ 1. Входы элементов 3ИЛИ 48, 49, 50, 51, 52 соединены с адресными линиями A0-A2 шины адреса управляющей ЭВМ 1. Выход элемента 5ИЛИ 47 соединен с одним из входов элементов 3ИЛИ-НЕ 53, 54, 55, 56, 57, вторые входы которых соединены с выходами элементов 3ИЛИ 48, 49, 50, 51, 52, соответственно, третьи входы соединены с линией сигнала -IOW шины управления управляющей ЭВМ 1, а выходы являются выходами C1, C2, C3, C4, C5 блока формирования управляющих сигналов 20.
Принцип работы устройства заключается в следующем. Координаты цели и собственного положения робота в начальный момент времени, необходимые для определения направления на цель с помощью управляющей ЭВМ 1, задаются в блоке задания координат цели и собственного положения робота 4 (см. фиг. 1). Перед началом каждого элементарного акта перемещения, сигнал с выхода блока исполнительных устройств 14, поступающий на вход блока формирования модели внешней среды 3, устанавливает все ключевые элементы 7 вычислительного блока 6, ключевые элементы радиального слоя 9 и ключевые элементы бокового слоя 11 дополнительного ряда ключевых элементов, состоящего из радиального слоя дополнительных ключевых элементов 8, левого и правого боковых слоев дополнительных ключевых элементов 10, 12, в нулевое состояние и m-стабильный триггер 13 переходит в состояние, в котором сигналы на его выходах отсутствуют. В это же время на выходах блока сенсорных датчиков 2 присутствуют сигналы, характеризующие внешнюю среду в данный момент времени. Поступая на входы блока 3 формирования модели внешней среды, эти сигналы преобразуются в двоичные и по сбросу сигнала с выхода блока исполнительных устройств 14 устанавливают ключевые элементы вычислительного блока 7, соответствующие участкам внешней среды, в состояния: "цель", если в данном участке внешней среды находится целевой объект: в этом состоянии ключевой элемент вычислительного блока 7 генерирует на своих выходах сигнал, распространяющийся на соседние ключевые элементы; "препятствие", если участок внешней среды занят препятствием: ключевой элемент, находящийся в этом состоянии, блокирует распространение сигнала от цели на соседние ключевые элементы вычислительного блока 7; "свободно", если участок внешней среды свободен для движения: ключевой элемент, находящийся в этом состоянии, проводит сигнал, поступивший на его вход, на выходы, соединенные с входами соседних ключевых элементов. Одновременно сигналы с выходов блока формирования модели внешней среды 3 поступают в блок формирования промежуточной цели 5 для определения необходимости формирования промежуточной цели в ряде дополнительных ключевых элементов, состоящего из радиального слоя дополнительных ключевых элементов 8, левого и правого боковых слоев дополнительных ключевых элементов 10, 12. Если целевой объект находится в области дистантного восприятия робота, то в вычислительном блоке 6 формируется истинная цель. Таким образом, сеть ключевых элементов 7 вычислительного блока 6 адекватно отображает обстановку во внешней среде, причем участок, в направлении которого необходимо двигаться, отображается в виде генератора импульсов. Распространяясь во все стороны, сгенерированный активный сигнал проходит через незаблокированные (свободные) ключевые элементы 7 вычислительного блока 6, обходя заблокированные, таким образом строится модель всех допустимых траекторий движения. Очевидно, что сигнал, первым поступивший на вход m-стабильного триггера 13, обозначающего местоположение робота, указывает направление движения к цели по кратчайшей траектории. Этот сигнал фиксируется m-стабильным триггером 13, причем все последующие сигналы, поступившие на вход m-стабильного триггера 13, не изменяют его состояния, которое сохраняется до тех пор, пока блок исполнительных устройств 14 не отработает элементарное перемещение и не сформирует сигнал, сбрасывающий ключевые элементы 7 вычислительного блока 6 и тем самым устанавливающий m-стабильный триггер 13 в исходное состояние. Кроме того, информация о выполненном перемещении по линии обратной связи B_BUS поступает в блок формирования промежуточной цели 5 для учета изменения положения робота в среде. В рассмотренной ситуации целевой объект находится в области дистантного восприятия робота. При этом ключевые элементы бокового слоя 11 левого и правого боковых слоев дополнительных ключевых элементов 10, 12 блокируют распространение сигнала, а ключевые элементы радиального слоя 9 радиального слоя дополнительных ключевых элементов 8 являются проводящими и отображают участки внешней среды, невидимой для робота.
В случае, если целевой объект не находится в пределах области восприятия блока сенсорных датчиков 2, в ряде дополнительных ключевых элементов формируется промежуточная цель, при этом ключевым элементом, генерирующим импульсы, становится ключевой элемент ряда дополнительных ключевых элементов, отображающий участок внешней среды, расположенный в направлении на целевой объект. Особенность работы ключевых элементов ряда дополнительных ключевых элементов заключается в следующем: если промежуточная цель сформирована в радиальном слое дополнительных ключевых элементов 8, то ключевые элементы радиального слоя 9 проводят импульсы, распространяющиеся от целевого элемента, а ключевые элементы бокового слоя 11 левого и правого боковых слоев дополнительных ключевых элементов 10, 12 блокируются; если промежуточная цель сформирована в одном из боковых слоев дополнительных ключевых элементов 10, 12 ряда дополнительных ключевых элементов, то распространение сигнала возможно в радиальном слое дополнительных ключевых элементов 8 и в боковом слое дополнительных элементов от целевого элемента через ключевые элементы бокового слоя 11, расположенные в направлении радиального слоя дополнительных ключевых элементов 8, а ключевые элементы противоположного бокового слоя дополнительных ключевых элементов и ключевые элементы бокового слоя 11, расположенные от целевого элемента в направлении m-стабильного триггера 13, блокируются. Приведенное функционирование ряда дополнительных ключевых элементов обеспечивает достижение поставленной цели, поскольку мобильный робот осуществляет перемещение к промежуточной цели, расположенной в направлении на истинную цель.
Принцип работы ключевого элемента 7 вычислительного блока 6 заключается в следующем. Информация, поступающая на входы b1, b2 (см. фиг. 2) от блока формирования модели внешней среды 3, определяет состояние ключевого элемента следующим образом: при b1 = 0 и b2 = 0 данный элемент отображает препятствие; при b1 = 0, b2 = 1 - свободный участок; при b1 = 1 и b2 = 1 - целевой участок, то есть является генератором импульсов.
Ключевой элемент радиального слоя 9 радиального слоя дополнительных ключевых элементов 8 (см. фиг. 3а) содержит один управляющий вход b1, обеспечивающий работу элемента в двух режимах: генератор импульсов (b1 = 1) и незаблокированный элемент (b1 = 0). Информация на входы b1 ключевых элементов 9 радиального слоя дополнительных ключевых элементов 8 поступает из блока формирования промежуточной цели 5 по группе выходов DO2.
Ключевой элемент бокового слоя 11 левого и правого боковых слоев дополнительных ключевых элементов 10, 12 (см. фиг. 3б) имеет два управляющих входа (b1, b2), обеспечивающих следующие режимы работы элемента: генератор импульсов (1,1); заблокированный элемент (0,0); незаблокированный элемент (0,1). Управляющие входы b1, b2 ключевых элементов левого и правого слоев дополнительных ключевых элементов 10, 12 подключены к группе выходов DO1, DO3 блока формирования промежуточной цели 5, соответственно.
Блок задания координат цели и собственного положения робота 4 (см. фиг. 4) хранит координаты целевого объекта и начального положения робота, которые задаются с помощью управляющей ЭВМ 1. Регистры 21 и 23 служат для хранения координат цели, а регистры 22, 24, 25 для хранения координат начального положения робота в пространстве: регистры 22, 24 - для хранения декартовых координат; регистр 25 - для задания ориентации робота в пространстве, то есть его расположения относительно направления "север-юг". Регистры 21-24 могут иметь разрядность 8 бит, при этом используется 256 комбинаций для задания расстояния до цели по каждой координате, а регистр 25 должен иметь разрядность 10 бит (для хранения угла ориентации робота в градусах в виде целого значения со знаком в диапазоне от 0 до 360 градусов). Данные о координатах записываются в регистры по шине D. Блок формирования управляющих сигналов (БФУС) 20, используя 8-разрядный адрес (шина A) и сигнал -IOW, формирует на выходах С1, С2, С3, С4, С5 сигналы записи в регистры (см. фиг. 5). При этом запись информации в регистр осуществляется при обращении к нему по соответствующему адресу и при низком уровне сигнала на линии -IOW. Элемент 5ИЛИ 47 разрешает формирование сигналов записи при наличии низких уровней сигнала на линиях A7-A3 шины адреса. Элементы 3ИЛИ 48-52 выбирают соответствующий регистр, адресуемый разрядами A2-A0 шины адреса. Таким образом, при наличии низкого уровня сигнала на линии -IOW, на выходе одного из элементов 3ИЛИ-НЕ 53-57 формируется сигнал записи в соответствующий регистр.
Блок формирования промежуточной цели 5 формирует управляющие сигналы (b1, b2) на выходах DO1, DO2, DO3 ПЗУ 46 для ключевых элементов радиального 8, левого 10 и правого 12 боковых слоев дополнительных ключевых элементов, один из которых и представляет собой целевой элемент, если истинная цель находится за пределами области дистантного восприятия сенсорных датчиков. Сигнал, указывающий на наличие цели в области восприятия сенсорных датчиков, формируется на выходе элемента 32 (2И-ИЛИ) и через блоки схем совпадения 40, 41 управляет подключением выходов регистров 42, 43 к адресным входам ПЗУ 46, причем, если целевой объект находится в области восприятия сенсорных датчиков, то подключение выходов регистров 42, 43 к входам ПЗУ 46 блокируется. Регистры 42, 43 хранят значения декартовых координат относительного положения робота и цели, регистр 44 - угол ориентации робота в пространстве (выходы регистра 44 подключены к части адресных входов ПЗУ 46). Вычисление относительной координаты робота и цели в начальный момент времени осуществляется с помощью сумматора 28 (29), реализующего вместе с подключенным на его вход блоком инверторов 26 (27) операцию вычитания над следующими операндами: координата начального положения робота в среде и координата цели. Информация с выхода сумматора 28 (29) через мультиплексор 34 (35) поступает на один из входов сумматора 37 (38), выход которого подключен к входу регистра 42 (43). На второй вход сумматора 37 (38) из шины B_BUS по линии сигналов Xr (Yr) поступает значение шага робота, сделанного в направлении соответствующей координаты (в начальный момент времени оно равно нулю). При начальном запуске триггер 33 устанавливается в '0' по сигналу RES. Выход триггера, равный '0', поступает на адресный вход мультиплексора 34 (35), обеспечивая подключение выхода сумматора 28 (29) к входу сумматора 37 (38). При поступлении сигнала d от блока исполнительных устройств 14, означающего завершение выполнения элементарного перемещения, триггер 33 устанавливается в '1' и находится в этом состоянии до следующего запуска системы, обеспечивая подключение ко входу сумматора 37 (38) выхода регистра 42 (43). Запись в регистры 42, 43, а также 44 происходит по снятию сигнала d. Определение угла ориентации робота в пространстве осуществляется на сумматоре 30, путем сложения изменения угла ориентации (Ar) при выполнении элементарного шага перемещения, поступающего от блока исполнительных устройств 14, и старого значения угла ориентации, поступающего из регистра 25 (в начальный момент времени) или из регистра 44, выходы которых подключены ко входам мультиплексора 45, управляющегося выходом триггера 33. Сумматор 39, мультиплексор 36 и трехвходовой элемент И 31 выполняют коррекцию полученного значения угла ориентации робота по следующим правилам: значение угла ориентации не меняется, если оно лежит в пределах от 0 до 383 градусов; к значению угла ориентации прибавляется константа c1 = 360, если оно меньше 0; к значению угла ориентации прибавляется константа c2 = -360, если оно больше 383 градусов (значение 383 выбрано для оптимизации схемотехнического решения). Таким образом, в случае отсутствия цели в области восприятия сенсорных датчиков робота, на адресные входы ПЗУ 46 поступает информация с выходов регистров 42, 43, 44. ПЗУ 46 хранит информацию, необходимую для настройки ключевых элементов радиального 8, левого 10 и правого 12 боковых слоев дополнительных ключевых элементов. Выходы ПЗУ 46 разбиты на три группы для радиального 8, левого 10 и правого 12 боковых слоев дополнительных ключевых элементов, соответственно.
Технико-экономическая оценка эффективности предлагаемого устройства по сравнению с прототипом проводилась на программной модели системы управления адаптивного мобильного робота. Эксперименты проводились при использовании различных вариантов внешней среды, при этом адаптивный мобильный робот достигал целевой объект, выбирая оптимальный или близкий к нему маршрут. Исследования показали, что заявленное устройство позволяет решить новую задачу поиска цели, находящейся за пределами области восприятия сенсорных датчиков.




Предлагаемое изобретение относится к области робототехники и предназначено для управления движением адаптивного робота, обладающего свойствами искусственного интеллекта. Технический результат заключается в обеспечении эффективного достижения мобильным роботом цели, находящейся за пределами области дистантного восприятия блока сенсорных датчиков. Устройство содержит блок сенсорных датчиков, блок формирования модели внешней среды, m-стабильный триггер, блок исполнительных устройств, управляющую ЭВМ, блок задания координат цели и собственного положения робота, вычислительный блок, содержащий матрицу ключевых элементов размером k•m, блок дополнительных ключевых элементов, содержащий радиальный слой дополнительных ключевых элементов, дополняющий матрицу ключевых элементов размером k•m до матрицы размером (k+1)•m, боковые слои дополнительных ключевых элементов и блок формирования промежуточной цели. 5 ил.
Устройство управления адаптивным мобильным роботом, содержащее блок сенсорных датчиков, выходы которого соединены с входами блока формирования модели внешней среды, выходами подключенного к входам вычислительного блока, содержащего матрицу ключевых элементов размером k x m, выходы ключевых элементов k-ой строки которой соединены с входами m-стабильного триггера, выходами подключенного ко входу блока исполнительных устройств, отличающееся тем, что в него введены управляющая ЭВМ, блок задания координат цели и собственного положения робота, входы которого соединены с выходами управляющей ЭВМ, блок дополнительных ключевых элементов, содержащий радиальный слой дополнительных ключевых элементов, дополняющих матрицу ключевых элементов размером k x m до матрицы размером (k + 1) x m, и боковой слой дополнительных ключевых элементов, коммуникационные входы/выходы ключевых элементов радиального слоя дополнительных ключевых элементов подключены к коммуникационным выходам/входам ключевых элементов вычислительного блока, расположенных в первой строке матрицы ключевых элементов размером k x m, коммуникационные выходы дополнительных ключевых элементов бокового слоя подключены к коммуникационным входам ключевых элементов вычислительного блока, расположенных в первом и m-ом столбцах матрицы ключевых элементов размером k x m, коммуникационные выходы дополнительных ключевых элементов бокового слоя, соответствующих первой строке матрицы ключевых элементов размером k x m, подключены к радиальному слою дополнительных ключевых элементов, блок формирования промежуточной цели, соединенный с выходами блока задания координат цели и собственного положения робота, с выходами блока формирования модели внешней среды, с группой выходов блока исполнительных устройств и входами блока дополнительных ключевых элементов, а выход блока исполнительных устройств соединен с входом блока формирования модели внешней среды.
| Устройство для управления движением адаптивного робота | 1977 |
|
SU716807A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| US 5442269 A, 15.08.95. | |||
