Изобретение относится к системе с чистящим роботом, в частности к системе с чистящим роботом, способной управлять чистящим роботом с большого расстояния, используя мобильную сеть связи.
Когда человек убирает дом с помощью пылесоса, от него требуется выполнение массы работы, поскольку он вынужден передвигать пылесос.
Соответственно был сконструирован чистящий робот, способный осуществлять уборку, свободно перемещаясь при подаче команды для уборки. Кроме того, объектом непрерывного изучения является мобильный робот с большим числом функций для предотвращения несчастных случаев, таких как кража. Фиг.1 представляет собой блок-схему обычного чистящего робота. На фиг.1 чистящий робот имеет приводной блок 40 для перемещения тела робота, блок 30 обнаружения препятствия для обнаружения препятствия на пути движения робота, пылесосный блок 50 для чистки пола, источник питания 70 для снабжения и подзарядки энергией, необходимой для каждого из блоков, и контроллер 60 для управления каждым из блоков. Кроме того, чистящий робот имеет приемный блок 10 дистанционного управления для управления с большого расстояния пуском/остановкой работы чистящего робота.
Блок 20 распознавания своего местоположения и устройство 40 обнаружения препятствия имеют платы 22, 23 обработки изображения и камеры 21, 31 для распознавания своего местоположения и обнаружения препятствия.
Когда с помощью приемного блока 10 дистанционного управления принимается команда уборки, чистящий робот, имеющий описанную выше конструкцию, инициализируется с контроллера 60 и снимает свое местоположение камерой 21 блока 20 распознавания своего местоположения. Затем чистящий робот передает данные об отснятом изображении на плату 22 обработки изображения и дает возможность обработать видеоданные. Контроллер 60 исследует текущее местоположение чистящего робота, анализируя видеоданные, передаваемые с платы 22 обработки изображения.
После этого контроллер 60 перемещает тело робота, передавая управляющий сигнал на приводные узлы 41а, 41b двигателей 42а, 42b на правом и левом колесах 43а, 43b. В это время контроллер 60, используя работу камеры 31 блока 30 обнаружения препятствия и получая видеоданные, закодированные в плате 32 обработки изображения, управляет приводным блоком 40 так, чтобы избегать препятствия. При перемещении чистящего робота в соответствующее место контроллер 60 выдает управляющий сигнал на пылесосный блок 50 и на приводной блок 40 для поворота и перемещения тела робота для выполнения уборки. Затем чистящий робот осуществляет процесс уборки в соответствии с запланированной траекторией.
Чистящий робот, управляемый, как описано выше, может избегать места препятствия перед собой, осуществляя распознавание препятствия через установленные промежутки времени во время перемещения в процессе уборки. Чистящий робот также может точно перемещаться на желаемое место, осуществляя распознавание своего местоположения через установленные интервалы времени.
Кроме того, чистящий робот использует ПЗС (прибор с зарядовой связью) для распознавания своего местоположения и обнаружения препятствия на пути движения. Более того, размер отснятого изображения очень велик, поэтому робот обычно использует видеопроцессор для отдельной обработки видеоданных.
Однако в случае обычного чистящего робота трудность состоит в изготовлении компактного чистящего робота, так как каждая из плат 22, 23 обработки изображения, имеющих видеопроцессор, устанавливается внутри тела чистящего робота.
Кроме этого, пользователь должен управлять чистящим роботом внутри помещения, так как обычный чистящий робот может управляться только с небольшого расстояния. Если пользователь хочет управлять чистящим роботом вне помещения, то такого способа управления чистящим роботом не существует.
Сущность изобретения
Задачей настоящего изобретения является создание системы с чистящим роботом, управляющей с помощью мобильной сети связи процессом уборки с большого расстояния, используя терминал мобильной связи и обработку видеоданных, отснятых чистящим роботом.
Поставленная задача достигается созданием системы с чистящим роботом, содержащей чистящий робот для выполнения уборки при свободном перемещении в помещении с использованием передаваемых управляющих данных, содержащихся в сигнале мобильной связи; ретрансляционный блок мобильной связи для приема сигнала мобильной связи, передаваемого от чистящего робота, и другого сигнала мобильной связи - к чистящему роботу, и пересылающий сигналы мобильной связи на соответствующие блоки; и терминал мобильной связи для передачи чистящему роботу через ретрансляционный блок мобильной связи команды к действиям.
Чистящий робот содержит приводной блок для перемещения тела робота; блок распознавания своего местоположения, содержащий камеру и датчик для распознавания текущего местоположения; блок обнаружения препятствия, содержащий камеру и датчик для обнаружения препятствия; пылесосный блок для сбора пыли на полу; модуль мобильной связи для передачи сигнала мобильной связи на ретрансляционный блок мобильной связи и контроллер для управления каждым из блоков с целью перемещения и уборки в соответствии с управляющими данными, переданными от модуля мобильной связи.
При завершении операции в соответствии с переданными управляющими данными контроллер передает информацию о завершении операции на терминал мобильной связи.
Контроллер передает на ретрансляционный блок мобильной связи изображение, отснятое камерой блока распознавания своего местоположения и камерой блока обнаружения препятствия.
Дополнительно к этому система с чистящим роботом содержит сервер обработки изображения для анализа видеоданных, передаваемых через ретрансляционный блок мобильной связи, и для передачи через этот же блок управляющих данных в соответствии с проанализированным результатом к чистящему роботу.
Сервер обработки изображения содержит интерфейс для согласования данных с ретрансляционным блоком мобильной связи; блок обработки изображения для обработки видеоданных, передаваемых с помощью интерфейса; котроллер для анализа видеоданных, обработанных блоком обработки изображения, вырабатывающий управляющие данные в соответствии с проанализированным результатом и выводящий управляющие данные на интерфейс.
В данном случае интерфейс сервера обработки изображения может либо получать по сети видеоданные с ретрансляционного блока мобильной связи с помощью ретрансляционной базы мобильной связи, либо получать радиочастотный сигнал непосредственно с ретрансляционного блока мобильной связи.
Краткое описание чертежей
Задача и особенность настоящего изобретения будут более очевидными при описании предпочтительного примера реализации настоящего изобретения со ссылками на прилагаемые чертежи, на которых:
фиг.1 является блок-схемой обычного чистящего робота;
фиг. 2 схематически изображает систему с чистящим роботом, использующую сеть мобильной связи в соответствии с настоящим изобретением;
фиг.3 является блок-схемой чистящего робота, изображенного на фиг.2, и
фиг. 4 является блок-схемой показанного на фиг.2 сервера обработки изображения.
Подробное описание предпочтительного примера реализации
Ниже со ссылками на прилагаемые чертежи будет подробно описан предпочтительный пример реализации настоящего изобретения.
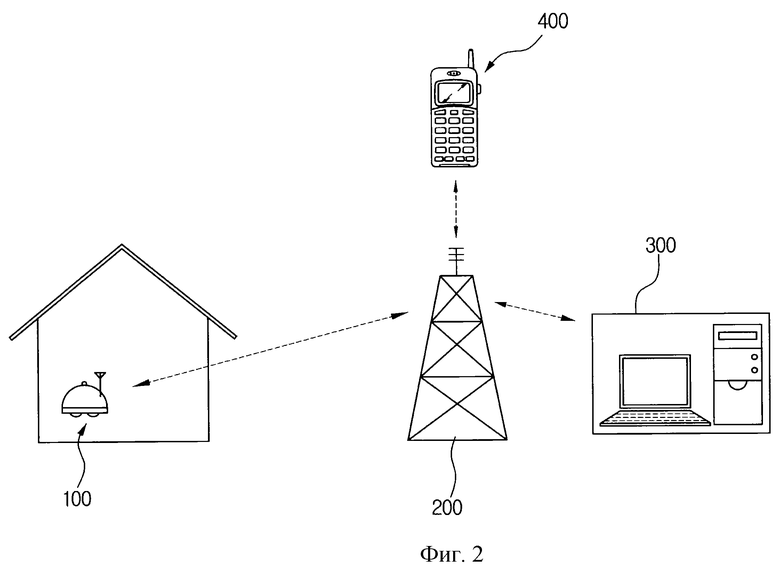
Фиг. 2 схематически изображает систему с чистящим роботом в соответствии с настоящим изобретением.
На фиг. 2 система с чистящим роботом содержит чистящий робот 100, ретрансляционный блок 200 мобильной связи, терминал 400 мобильной связи и сервер 300 обработки изображения.
Чистящий робот 100 создает видеоданные с помощью установленной камеры и передает их на ретрансляционный блок 200 мобильной связи в виде первого сигнала мобильной связи. Чистящий робот 100 также принимает с ретрансляционного блока 200 мобильной связи второй сигнал мобильной связи, содержащий управляющие данные. Кроме того, чистящий робот 100 перемещает тело робота и осуществляет процесс уборки в соответствии с управляющими данными, содержащимися во втором сигнале мобильной связи.
Ретрансляционный блок 200 мобильной связи принимает сигналы мобильной связи и пересылает их на соответствующие блоки. Сигналы мобильной связи соответственно относятся к видеоданным, передаваемым от чистящего робота 100, а также к сигналам управления чистящим роботом, передаваемым с терминала 400 мобильной связи или с сервера 300 обработки изображения.
Терминал 400 мобильной связи передает команду к действиям чистящему роботу 100 через ретрансляционный блок 200 мобильной связи.
Сервер 300 обработки изображения анализирует видеоданные, передаваемые через ретрансляционный блок 200 мобильной связи, вырабатывает управляющие данные в соответствии с проанализированным результатом и передает управляющие данные на ретрансляционный блок 200 мобильной связи.
Фиг. 3 является блок-схемой чистящего робота в соответствии с настоящим изобретением.
На фиг.3 чистящий робот 100 содержит приводной блок 110 для перемещения тела робота; блок 120 распознавания своего местоположения, содержащий камеру 121 и датчик 122 для распознавания текущего местоположения чистящего робота; блок 130 обнаружения препятствия, содержащий камеру 131 и датчик 132 для обнаружения препятствия на пути движения; пылесосный блок 115 для сбора пыли на полу; модуль 140 мобильной связи для передачи преобразованных в сигнал мобильной связи видеоданных, переданных с блока 120 распознавания своего местоположения и блока 130 обнаружения препятствия, и вывода переданного сигнала мобильной связи, преобразованного в управляющие данные, и контроллер 150 для управления каждым из блоков с целью перемещения и уборки в соответствии с управляющими данными, передаваемыми от модуля 140 мобильной связи. Отображающее устройство 160 показывает предельное отклонение чистящего робота 100. Контроллер 150 чистящего робота 100 в соответствии с управлением блоком, запрашивающим операцию, создает информацию о завершении операции и передает ее на модуль 140 мобильной связи при завершении запрошенной операции. Кроме того, чистящий робот 100 содержит приемный блок 180 дистанционного управления, размещенный с возможностью реагировать на сигналы пуска, перемещения, уборки и остановки чистящего робота, которые пользователь передает с помощью дистанционного управления с короткого расстояния; и различные датчики (не показаны) для защиты тела робота от опасностей, вызываемых столкновением или падением, обнаруживающие препятствие и распознающие местоположение робота. Кроме этого, чистящий робот 100 дополнительно содержит блок питания 170 для снабжения энергией каждого из блоков и подзарядки от внешнего зарядного устройства.
В данном случае приводной блок 110 содержит двигатели 111b, 112b, приводимые в движение действием вращательных электроприводов 111а, 112а для вращения правого и левого колес. Пылесосный блок 130 также содержит вентиляторный электродвигатель 115b с электроприводом 115а для работы отсасывающего вентилятора (не показан) для того, чтобы втягивать пыль с пола.
Кроме того, камера 121, установленная на блоке 120 распознавания своего местоположения, направлена на потолок, а камера 123, установленная на блоке 130 обнаружения препятствия, направлена на место впереди чистящего робота 100. К тому же чистящий робот 100 дополнительно содержит блок 190 выбора камеры для избирательного функционирования камер 121, 131 блока 120 распознавания своего местоположения и блока 130 обнаружения препятствия в соответствии с управляющими данными контроллера 150.
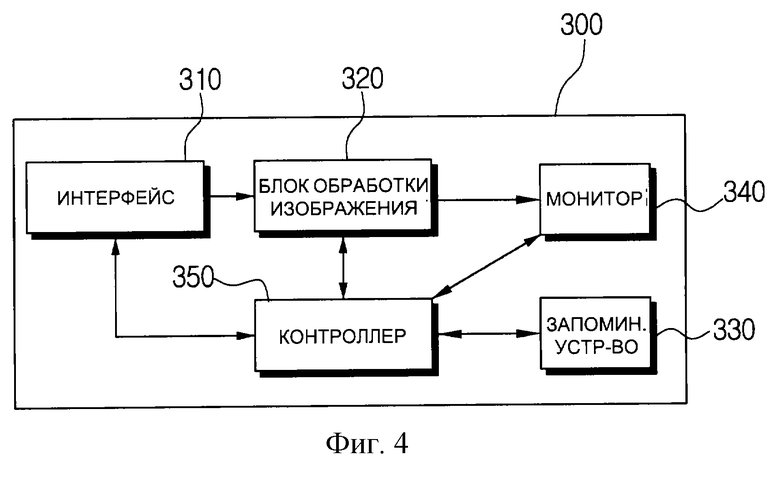
Фиг. 4 является блок-схемой сервера 300 обработки изображения в соответствии с настоящим изобретением.
На фиг.4 сервер 300 обработки изображения содержит интерфейс 310 для согласования данных с ретрансляционным блоком 200 мобильной связи; блок 320 обработки изображения для кодирования видеоданных, передаваемых через интерфейс 310, и контроллер 350 для выработки управляющих данных в соответствии с проанализированной информацией о видеоданных, закодированных с помощью блока 320 обработки изображения, и вывода управляющих данных с помощью интерфейса 310.
В данном случае интерфейс 310 сервера 300 обработки изображения может либо получать видеоданные по сети с ретрансляционного блока 200 мобильной связи с помощью ретрансляционной базы мобильной связи, либо получать радиочастотный сигнал непосредственно с ретрансляционного блока 200 мобильной связи.
Ниже будет описано действие системы с чистящим роботом, использующей сеть мобильной связи, в соответствии с настоящим изобретением.
Прежде всего, при передаче сигнала на привод с устройства дистанционного управления (не показано) или с терминала 400 мобильной связи через ретрансляционный блок 200 мобильной связи контроллер 150 чистящего робота 100 выполняет инициализацию и приводит в действие первую камеру 121 блока120 распознавания своего местоположения, чтобы заснять потолок в текущем местоположении. Затем контроллер 150 преобразует отснятые видеоданные в сигнал мобильной связи с помощью модуля 140 мобильной связи и выводит сигнал мобильной связи на ретрансляционный блок 200 мобильной связи. После этого ретрансляционный блок 200 мобильной связи, получающий сигнал мобильной связи от модуля 140 мобильной связи чистящего робота 100, пересылает сигнал мобильной связи на интерфейс 310 сервера 300 обработки изображения. При передаче видеоданных на интерфейс 310 контроллер 350 сервера 300 обработки изображения дает возможность закодировать переданные видеоданные в блоке 320 обработки изображения. Чистящий робот 100 распознает текущее местоположение, основываясь на закодированных видеоданных. После распознавания текущего местоположения чистящего робота 100 контроллер 350 сервера 300 обработки изображения вырабатывает управляющие данные для управления изменением местоположения чистящего робота 100 по видеоданным и выводит управляющие данные на интерфейс 310. Затем ретрансляционный блок 200 мобильной связи пересылает к чистящему роботу 100 управляющие данные, переданные от сервера 300 обработки изображения для управления изменением местоположения чистящего робота 100.
При передаче управляющих данных чистящему роботу 100 модуль мобильной связи чистящего робота 100 преобразует передаваемый сигнал мобильной связи в управляющие данные и передает управляющие данные на контроллер 150 чистящего робота 100. Контроллер 150 чистящего робота 100 распознает по переданным управляющим данным местоположение, в которое нужно переместиться, выдает управляющий сигнал на вращательные электроприводы 111а, 112а правого и левого колес в соответствии с заданным местоположением и запускает двигатели 111b, 112b. Таким способом чистящий робот 100 меняет местоположение. В это время контроллер 150 чистящего робота 100 передает видеоданные, касающиеся траектории движения чистящего робота 100 через модуль 140 мобильной связи, используя работу камеры 131, на сервер 300 обработки изображения. В данном случае контроллер 150 чистящего робота 100 управляет блоком 190 выбора камеры для передачи видеоданных, созданных периодически действующей камерой 121 блока 120 распознавания своего местоположения. Кроме того, контроллер 150 чистящего робота 100 позволяет передавать видеоданные, отснятые камерой 121 блока 120 распознавания своего местоположения.
Затем контроллер 350 сервера 300 обработки изображения получает видеоданные от каждой из камер 121, 131 блока 130 обнаружения препятствия и блока 120 распознавания своего местоположения через ретрансляционный блок 200 мобильной связи, анализирует видеоданные, отснятые камерой 121 блока 120 распознавания своего местоположения, и видеоданные, отснятые камерой 131 блока обнаружения препятствия, и выводит управляющие данные, относящиеся к изменению местоположения.
Когда чистящий робот 100 перемещается в соответствующее место таким способом, контроллер 150 чистящего робота 100 выводит сигнал о завершении перемещения, извещающий через модуль 140 мобильной связи о завершении изменения местоположения. Контроллер 350 сервера 300 обработки изображения, который получает информационный сигнал о завершении перемещения, распознает, что перемещение чистящего робота 100 завершено, вырабатывает управляющие данные для управления процессом уборки и выводит управляющие данные на интерфейс 310.
После этого контроллер 150 чистящего робота 100 получает управляющие данные для управления процессом уборки через ретрансляционный блок 200 мобильной связи, запускает вентиляторный электродвигатель 115b, выдавая управляющие данные на вращательный электропривод 115а двигателя пылесосного блока 115 в соответствии с управляющими данными для управления процессом уборки, переданными через модуль 140 мобильной связи, и дает возможность чистящему роботу 100 начать процесс уборки с текущего местоположения. Затем контроллер 150 чистящего робота 100 поворачивает и перемещает тело робота, выдавая управляющие данные на приводной блок 110 таким образом, чтобы процесс уборки мог выполняться по запрограммированной траектории. В это время камера 131 блока 130 обнаружения препятствия постоянно снимает место впереди чистящего робота 100 и передает видеоданные на сервер 300 обработки изображения.
Система с чистящим роботом в соответствии с настоящим изобретением, как было описано выше, позволяет обрабатывать изображение, отснятое камерами 121, 131, установленными на чистящем роботе 100, на сервере 300 обработки изображения, удаленном на большое расстояние. Кроме того, пользователь может управлять чистящим роботом 100 с большого расстояния, используя терминал 400 мобильной связи.
Следовательно, система с чистящим роботом в соответствии с настоящим изобретением может усовершенствовать способ использования чистящего робота, поскольку пользователь может управлять чистящим роботом 100 с большого расстояния, используя сеть мобильной связи. Кроме того, чистящий робот может быть выполнен более компактным, так как плата обработки изображения не обязательно должна быть установлена на чистящем роботе, потому что изображение обрабатывается вне чистящего робота, и при этом себестоимость также уменьшается.
До сих пор был проиллюстрирован и описан предпочтительный пример реализации настоящего изобретения. Однако настоящее изобретение не ограничено предпочтительным примером реализации, описанным здесь, и специалист может видоизменить настоящее изобретение без искажения сущности изобретения, заявленного в формуле.

Изобретение относится к системе с чистящим роботом, способной управлять чистящим роботом с большого расстояния, используя мобильную сеть связи. Система содержит чистящий робот для выполнения уборки при свободном перемещении в помещении с помощью передаваемых управляющих данных, содержащихся в сигнале мобильной связи, ретрансляционный блок мобильной связи для приема сигнала мобильной связи, передаваемого от чистящего робота, и другого сигнала мобильной связи - для управления чистящим роботом, и пересылающий сигналы мобильной связи к соответствующим блокам, и терминал мобильной связи для передачи чистящему роботу команды для действий через ретрансляционный блок мобильной связи. Изобретение позволит управлять процессом уборки с большого расстояния, используя терминал мобильной связи, позволит изготовить чистящий робот в более компактном виде, и его себестоимость будет снижена. 5 з.п.ф-лы, 4 ил.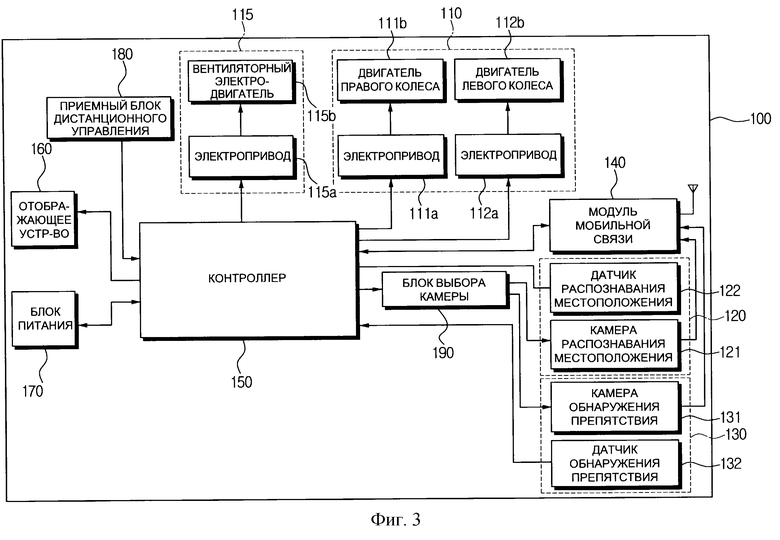
| KR 9402792, 02.04.1994 | |||
| US 5534762, 09.07.1996 | |||
| Устройство для кантования крупногабаритных строительных изделий | 1974 |
|
SU490736A1 |
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

