Это изобретение относится к области систем возбуждения для возбуждения колебаний трубы датчика параметров процесса в вибрирующей трубе. В частности, настоящее изобретение относится к системе, работающей в модальной области, чтобы возбуждать любое количество возбудителей с любым силовым типом колебаний.
Известно использование масс-расходомеров с кориолисовым эффектом для измерения потока массы и другой информации для материалов, протекающих по трубе. Типовые кориолисовы расходомеры описаны в патентах США: номера 4.109.524 от 29 августа 1978 г., 4.491.025 от 1 января 1985 г. и Re 31.450 от 11 февраля 1982 г., все выданы Дж. Е. Смиту и др. Эти расходомеры имеют одну или более труб прямой или изогнутой конфигурации. Каждая конфигурация трубы в кориолисовом масс-расходомере имеет набор естественных видов колебаний, которые могут быть простого изгибающего, скручивающего, радиального или связанного типа. Каждая труба возбуждается для колебаний в резонанс с одним из этих естественных видов колебаний. Материал входит в расходомер от присоединенной трубы на входной стороне расходомера, направляется через трубу или трубы, и выходит из расходомера через выходную сторону. Виды естественных колебаний заполненной материалом системы частично определяются совместными характеристиками массы и жесткости труб и материала, протекающего в трубах.
Когда нет потока через расходомер, все точки вдоль трубы вибрируют благодаря приложенной силе возбудителя, с идентичной фазой или фазой нулевого потока, в зависимости от вида возбуждаемых колебаний. Когда материал начинает течь, кориолисовы силы создают изменение по фазе между любыми двумя точками вдоль трубы. Фаза на входной стороне трубы отстает от возбудителя, в то время как фаза на выходной стороне опережает возбудитель. Датчики для съема показаний размещены на трубе, чтобы создавать синусоидальные сигналы, представляющие движение трубы. Сигналы, выдаваемые считывающими тензо-датчиками, обрабатываются, чтобы определить изменение по фазе разности между считывающими датчиками. Изменение по фазе разности между двумя сигналами считывающих датчиков пропорционально скорости потока массы материала через трубу.
Типовым компонентом каждого кориолисова расходомера и каждого денситометра вибрирующей трубы является система возбуждения. Система возбуждения действует, чтобы прикладывать периодическое физическое усилие к трубе, которое заставляет трубу вибрировать. Система возбуждения включает, по меньшей мере, один возбудитель, установленный на трубе (трубах) расходомера. Механизм возбудителя обычно содержит одно из множества хорошо известных устройств, таких, как звуковая катушка, у которой магнит установлен на одной трубе, а катушка из провода установлена на другой трубе, напротив магнита, но не ограничиваясь этим. Схема возбуждения непрерывно прикладывает периодический, обычно синусоидальный или прямоугольный сигнал возбуждения к катушке возбудителя. Путем взаимодействия непрерывного переменного магнитного поля, создаваемого катушкой в ответ на периодический сигнал возбуждения, и постоянного магнитного поля, создаваемого магнитом, обе проточные трубы первоначально приводятся в состояние вибрации по противоположной синусоидальной схеме, которая в дальнейшем поддерживается. Опытные специалисты знают, что любое устройство, способное преобразовывать электрический сигнал в механическую силу, пригодны для применения в качестве возбудителя. (Смотри патент США 4.777.833, выданный Карпентеру и переданный от его лица фирме Micro Motion. Inc.) Также нет необходимости использовать синусоидальный сигнал, в качестве сигнала возбуждения может быть применен любой периодический сигнал (см. патент США 5.009.109, выданный Калотаю и др. и переданный от его лица фирме Micro Motion, Inc.).
Типовой режим, хотя не единственный режим, в котором кориолисовы расходомеры возбуждаются для колебаний, есть первый внефазовый изгибающий режим. Первый внефазовый изгибающий режим является основным изгибающим режимом, при котором две трубы кориолисова расходомера с двойной трубой колеблются в противофазе друг другу. Однако это не единственный режим колебаний, представленный в структуре колебаний кориолисова расходомера, возбужденного в первом внефазовом изгибающем режиме. Имеются, конечно, более высокие режимы колебаний, которые могут быть возбуждены. Имеется также как результат протекания жидкости через вибрирующую расходомерную трубку и возникающих из-за этого кориолисовых сил, первый внефазовый скручивающий режим, который возбуждается так же, как и другие режимы. Имеются также синфазный и поперечный режимы вибраций. В конечном счете существуют сотни режимов колебаний, фактически возбужденных в кориолисовом расходомере, который возбуждается для колебаний в первом внефазовом изгибающем режиме. Даже в пределах относительно узкого диапазона частот вблизи первого внефазового изгибающего режима имеется, по меньшей мере, несколько дополнительных режимов колебаний. В дополнение к множеству режимов, возбуждаемых приводным возбуждением расходомерных трубок, могут быть режимы, возбужденные благодаря вибрации, внешней относительно расходомера. Например, насос, расположенный где-нибудь в линии обработки, может создать вибрацию вдоль трубопровода, которая возбуждает режим вибрации в кориолисовом расходомере. Другая причина того, что в кориолисовом расходомере иногда возбуждаются дополнительные и нежелательные режимы, это когда производственные допуски таковы, что элементы возбудителя не расположены симметрично на расходомерных трубках. Это приводит к действию на возбудитель эксцентрических сил в расходомерных трубках, таким образом возбуждающих множество режимов колебаний. Таким образом, кориолисов расходомер, возбужденный, чтобы колебаться или резонировать в первом внефазовом изгибающем режиме, в действительности имеет трубы, вибрирующие во многих других режимах в дополнение к первому внефазовому изгибающему режиму. Измерители, возбужденные, чтобы колебаться в режимах, отличных от первого внефазового изгибающего режима, испытывают те же явления множества возбужденных режимов в дополнение к заданному режиму возбуждения.
Существующие системы возбуждения обрабатывают сигнал обратной связи, обычно один из сигналов тензодатчика, чтобы произвести сигнал возбуждения. К сожалению, сигнал обратной связи возбуждения содержит выходные сигналы от других режимов, в дополнение к желаемому режиму возбуждения. Таким образом, сигнал обратной связи возбуждения фильтруется через частотный фильтр, чтобы удалить нежелательные составляющие, и отфильтрованный сигнал затем усиливается и подается к возбудителю. Однако частотный фильтр (полосовой фильтр), используемый для фильтрации сигнала обратной связи возбуждения, не эффективен для отделения единственного желаемого режима возбуждения от выходных сигналов других режимов, присутствующих в сигнале обратной связи возбуждения. Могут быть внерезонансные выходные сигналы от других режимов, которые находятся вблизи резонансной частоты желаемого режима. Могут быть также резонансные сигналы на частотах, приближающихся к желаемой резонансной частоте. В любом случае отфильтрованный сигнал обратной связи возбуждения, т.е. сигнал возбуждения обычно содержит информацию о режиме на частотах, отличающихся от желаемого режима для возбуждения расходомерной трубки. Сигнал возбуждения, состоящий из резонансных сигналов от множества входных сигналов режимов, через возбудитель, передает энергию расходомерной трубке, которая возбуждает каждый режим, для которого сигнал возбуждения содержит информацию о режиме. Такой многорежимный сигнал возбуждения вызывает проблемы в работе кориолисовых расходомеров. Кроме того, частотные фильтры вводят отставание по фазе в отфильтрованный сигнал возбуждения. Это может привести к потребности в большей мощности возбуждения для возбуждения расходомерных трубок с желаемой амплитудой. Это описано в DE 19634663A, выданном Fuji Electronic Co, Ltd.
Одна проблема, вызванная многорежимным сигналом возбуждения, состоит в том, что внешние вибрации, такие как вибрации трубопровода, усиливаются сигналом возбуждения. Если вибрации трубопровода, внешнего к кориолисову расходомеру, заставляют расходомер вибрировать, сигнал обратной связи возбуждения содержит реакцию на вибрацию трубопровода. Частотный фильтр не может удалить нежелаемый сигнал реакции, если вибрация трубопровода попадает, по меньшей мере, частично в пределы полосы пропускания фильтра. Отфильтрованный сигнал обратной связи возбуждения, включая нежелательную реакцию на вибрацию трубопровода, усиливается и подается к возбудителю. Возбудитель затем действует, чтобы усилить режим возбуждения вибрации трубопровода.
Дополнительная проблема сигнала возбуждения, имеющего информацию о режимах на множестве частот, возникает относительно измерения плотности, выполняемого кориолисовым масс-расходомером. Измерение плотности в кориолисовом расходомере или денситометре с вибрирующей трубкой основывается на измерении резонансной частоты вибрирующей расходомерной трубки. Проблема возникает, когда расходомерные трубки возбуждаются в ответ на сигнал возбуждения, содержащий информацию о множестве режимов. Наложение множества режимов в сигнале возбуждения может проявиться в расходомерной трубке, которая возбуждена вне резонанса от действительной резонансной частоты желаемого режима возбуждения. Это может привести к погрешности в измерении плотности.
Вышеупомянутые проблемы описывают различные условия, при которых сигнал возбуждения, предназначенный возбудить единственный режим, ухудшается так, что он возбуждает множество режимов. Известно использование фильтра режима, чтобы производить сигнал возбуждения от, по меньшей мере, двух сигналов обратной связи, где модально отфильтрованный сигнал возбуждения имеет информацию о режиме только на желаемом режиме вибрации. Фильтр режима используется, чтобы улучшить желаемый режим возбуждения и подавить один или более нежелательных режимов.
Бывают положения, когда желательно возбудить множество режимов, и таким образом требуется сигнал возбуждения, имеющий информацию о режиме в множестве режимов. Одновременное возбуждение двух режимов требует сигнала возбуждения, имеющего информацию о режиме этих двух режимов. Могут быть другие причины для возбуждения вибрирующей трубы так, чтобы возбуждалось множество режимов, и множество режимов подавлялось. Например, наложение во временном интервале одного сигнала возбуждения, имеющего информацию о режиме в первом режиме и второго сигнала возбуждения, имеющего информацию о режиме во втором режиме, производит двухрежимный сигнал возбуждения. Возбудители могут быть закреплены на расходомерной трубке, так чтобы нежелательные режимы не возбуждались, и это особенно показывает преимущества множества возбудителей. Не имеется существующих систем управления возбуждением для создания сигналов возбуждения, имеющих желаемую информацию о режиме в множестве режимов, или для создания отфильтрованных по режимам сигналов возбуждения к множеству возбудителей.
Существует необходимость в системе управления возбуждением, которая может быть легко адаптирована к обработке множества сигналов обратной связи возбуждения, чтобы производить множество сигналов возбуждения, каждый из которых имеет информацию о режиме, которая влияет на множество режимов.
Выше определенные проблемы и другие проблемы решаются и достигается технический прогресс в этой области, с помощью обобщенной модальной пространственной системы управления возбуждением согласно настоящему изобретению. Настоящее изобретение обеспечивает обобщенную систему управления возбуждением, которая работает в интервале режимов, чтобы создавать сигнал или сигналы возбуждения для одного или более возбудителей на вибрирующей структуре. Система возбуждения принимает множество сигналов обратной связи возбуждения, разбивает информацию о режиме вибрирующей трубы на сигналы реакции на режим с одной степенью свободы (ОСС, SDOF), обрабатывает сигналы реакции на режим ОСС, чтобы выбрать желаемые значения каждого режима, и преобразует результаты в физическую область для приложения к возбудителю (возбудителям). Таким образом, используя обобщенную систему управления возбуждением согласно настоящему изобретению, создаются один или более сигналов возбуждения, чтобы возбудить один или более возбудителей, таким образом возбуждая или подавляя определенные режимы на вибрирующей структуре. Дополнительно система управления возбуждением согласно настоящему изобретению работает в множестве рабочих конфигураций и легко переключается между ними. Например, один набор сигналов возбуждения генерируется согласно настоящему изобретению во время конфигурации работы по измерению потока, а альтернативный набор сигналов возбуждения генерируется согласно настоящему изобретению во время конфигурации работы по измерению осевого напряжения.
Система управления возбуждением согласно настоящему изобретению используется, чтобы управлять режимами колебаний вибрирующей структуры, которая включает, по меньшей мере, одну вибрирующую трубу. Вибрирующая структура может также включать дополнительные вибрирующие трубы или один или более балансовых стержней, которые не смачиваются жидкостью, подлежащей измерению расходомером. Также вибрирующая структура может включать фланцы или кожухи. Датчики обратной связи и возбудители размещаются на любой части (частях) вибрирующей структуры согласно настоящему изобретению, чтобы привести к возбуждению желаемых режимов и подавлению нежелательных режимов.
В одном воплощении настоящего изобретения, по меньшей мере, один датчик обратной связи обеспечивает сигнал движения, указывающий движение вибрирующей трубы. Сигнал движения имеет информацию о режиме в множестве режимов, каждая из которых связана с определенной частотой. Множество частотных полосовых фильтров создают множество сигналов реакции режима. Каждый сигнал реакции режима связан с одним из режимов колебаний, присутствующим на вибрирующей трубе. В другом воплощении настоящего изобретения, по меньшей мере, два датчика обратной связи обеспечивают сигналы движения, указывающие движение вибрирующей трубы. Сигналы движения имеют информацию о режиме в множестве режимов колебаний. Сигналы движения вводятся в многоканальный фильтр режима, имеющий канал для каждого режима, который должен быть подвергнут воздействию, т. е. возбуждаться или подавляться системой управления возбуждением. Каждый канал фильтра режима производит сигнал реакции режима, соответствующий одному из множества режимов колебаний, с которой вибрирует труба. Контроллер возбуждения, имеющий канал для каждого сигнала реакции режима, действует, чтобы производить сигнал возбуждения режима, соответствующий каждому режиму колебаний. Сигнал возбуждения режима, соответствующий данному режиму колебаний, показывает степень, с которой данный режим присутствует в конечном сигнале (сигналах) возбуждения. Преобразователь режима в физическую силу принимает сигналы возбуждения режима, преобразует их в физическую величину и выдает один или более сигналов возбуждения для приложения к одному или более возбудителям. Следующее воплощение настоящего изобретения использует частотные полосовые или другие временные фильтры в дополнение к фильтрам режима, чтобы генерировать сигналы реакции режима для дополнительной обработки. В следующем воплощении настоящего изобретения используется комбинация частотных полосовых фильтров и фильтров режима. Один выходной сигнал от каждого фильтра режима пропускается через частотный полосовой фильтр.
Фильтр режима согласно настоящему изобретению состоит из канала для каждого режима вибраций, на который влияет система возбуждения. Сигнал реакции режима, который по существу является сигналом ОСС, создается для каждой вибрации, которая подвержена влиянию системы возбуждения согласно настоящему изобретению. Конфигурация каналов фильтра режима, однажды установленная, не требует реконфигурации, даже когда система возбуждения переключается от первой рабочей конфигурации ко второй рабочей конфигурации. Подобным образом преобразователь от режима в физическую силу конфигурирован согласно различным способам, описанным здесь, и не требует реконфигурации, даже когда система возбуждения переключается от первой рабочей конфигурации ко второй рабочей конфигурации.
Каждый канал контроллера возбуждения принимает входной сигнал одного из сигналов реакции режима ОСС. Сигнал реакции режима сравнивается с заданным значением реакции режима, чтобы выдать сигнал погрешности режима. Сигнал погрешности режима устанавливается ступенью усиления, чтобы выдать сигнал возбуждения режима для каждого режима, на который воздействует система возбуждения согласно настоящему изобретению. Относительная амплитуда сигналов возбуждения режима, соответствующая каждому возбужденному режиму колебаний, показывает степень, в которой данный режим присутствует в сигнале (сигналах) возбуждения, произведенном системой согласно настоящему изобретению. Например, если данный режим колебаний "нежелательный" режим, должен быть подавлен, тогда заданное значение реакции режима для соответствующего сигнала реакции режима равно нулю. Полученный сигнал возбуждения режима преобразуется в физическую величину, т.е. приложенную силу, с помощью действия преобразователя режима в физическую силу. Сила прикладывается к вибрирующей трубе, чтобы подавить нежелательный режим.
Система возбуждения согласно настоящему изобретению обеспечивает множество рабочих конфигураций. Таким образом, кориолисов расходомер, например, использующий систему возбуждения согласно настоящему изобретению, может изменяться между различными рабочими конфигурациями, каждая из которых требует разной методологии возбуждения. Рассмотрим следующий пример. В первой рабочей конфигурации определенный режим колебаний может быть нежелательным и поэтому подавлен системой возбуждения согласно настоящему изобретению. Однако во второй рабочей конфигурации тот же режим колебаний может быть желательным и поэтому улучшен системой возбуждения согласно настоящему изобретению. Единственными изменениями системы возбуждения согласно настоящему изобретению от одной рабочей конфигурации к другой рабочей конфигурации являются заданные значения реакции режима для каждого канала контроллера возбуждения. Просмотровая таблица содержит подходящие заданные значения для различных рабочих конфигураций данного кориолисова расходомера или денситометра вибрации.
Система возбуждения согласно настоящему изобретению преобразует множество сигналов движения из временного интервала в сферу режима. В сфере режима сигналы движения разбиваются на сигналы реакции режима ОСС для каждого режима колебаний, который должен быть возбужден системой возбуждения. Каждый сигнал реакции режима обрабатывается, чтобы создать соответствующий сигнал возбуждения режима. Сигнал возбуждения режима представляет собой величину соответствующего режима колебаний, который приложен в качестве компонента сигнала (сигналов) возбуждения, чтобы осуществить желаемую установку реакции режима. Сигналы возбуждения режима преобразуются из сферы режима во временной интервал, чтобы создать сигнал (сигналы) возбуждения, который создает силу, приложенную к возбудителю (возбудителям).
Фиг. 1 показывает кориолисов расходомер и соответствующую измерительную электронику.
Фиг. 2 показывает блок-схему обобщенной пространственной системы управления возбуждением режима согласно настоящему изобретению.
Фиг.3 показывает блок-схему схемы возбуждения согласно настоящему изобретению.
Фиг. 4 показывает частотную функцию реакции типового сигнала обратной связи расходомерной трубки и дополнительных частотных функций реакции, представляющих вклад составляющих режимов колебаний в сигнал обратной связи.
Фиг. 5 показывает блок-схему многоканального фильтра режима согласно настоящему изобретению.
Фиг. 6 показывает процессор сигналов реакции режима согласно настоящему изобретению.
Фиг. 7 есть блок-схема, иллюстрирующая шаги процесса для преобразования скалярного сигнала возбуждения режима в вектор проекции физической силы.
Фиг. 8 есть блок-схема, иллюстрирующая шаги процесса для выбора весовых коэффициентов фильтра режима с помощью проб и ошибок.
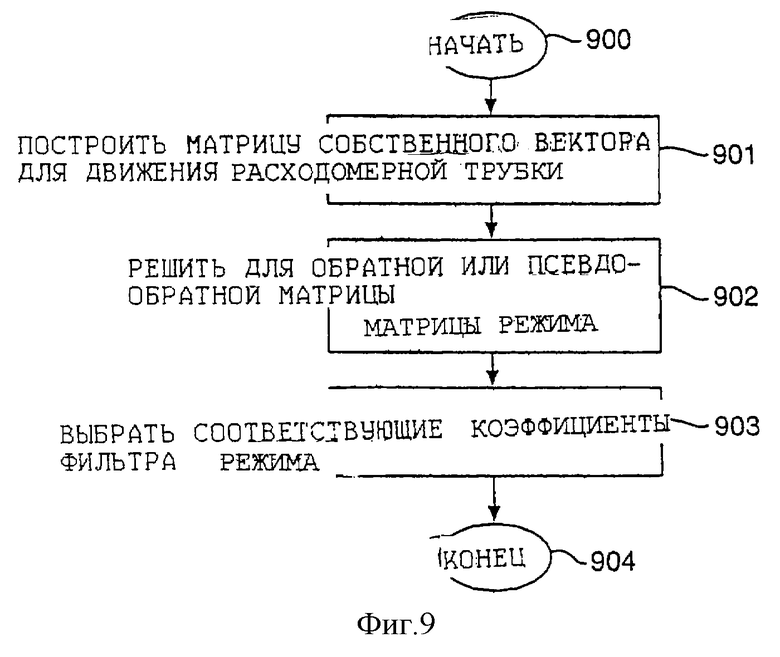
Фиг. 9 есть блок-схема, иллюстрирующая шаги процесса для выбора весовых коэффициентов фильтра режима с помощью вычисления обратных или псевдо-обратных значений матрицы собственного вектора.
Фиг. 10 изображает альтернативный контроллер возбуждения согласно настоящему изобретению.
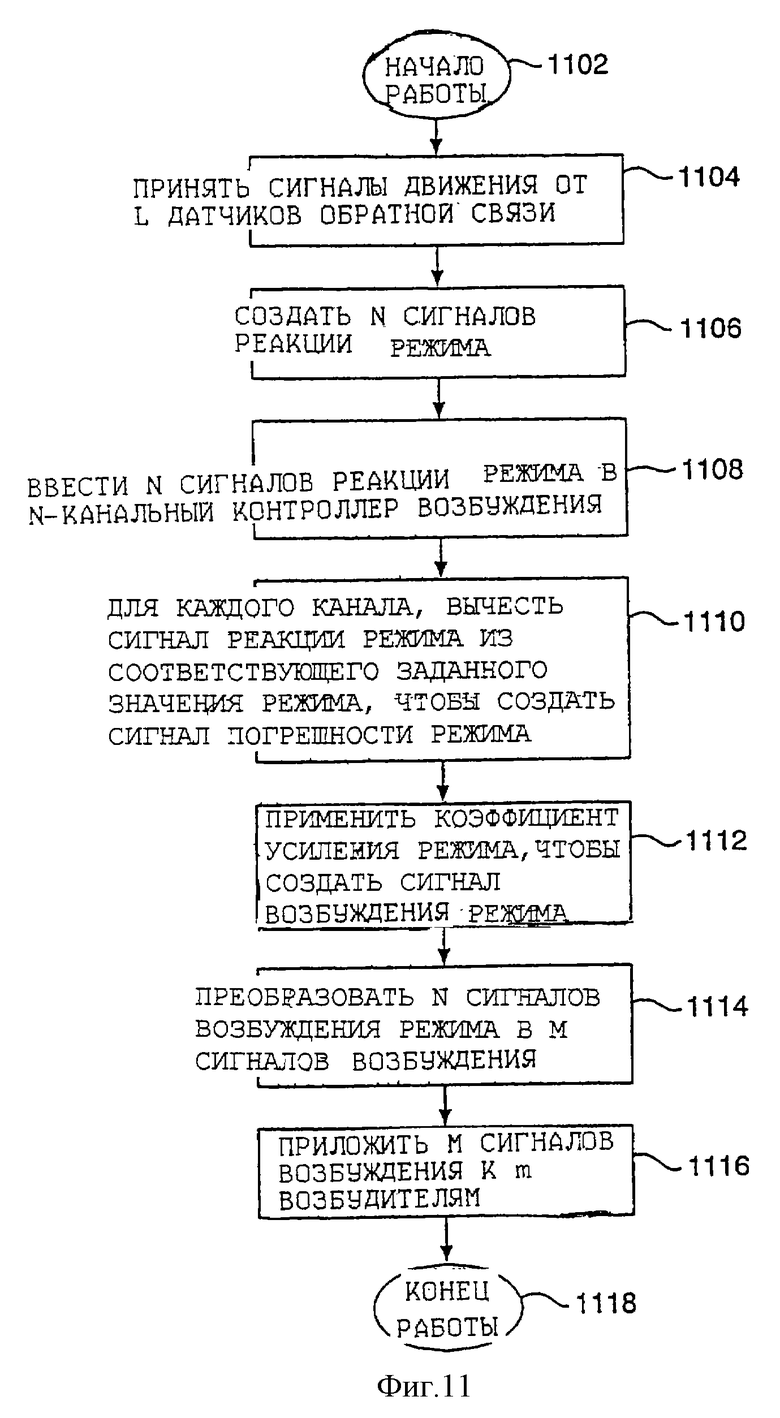
Фиг.11 есть блок-схема, обобщающая работу настоящего изобретения.
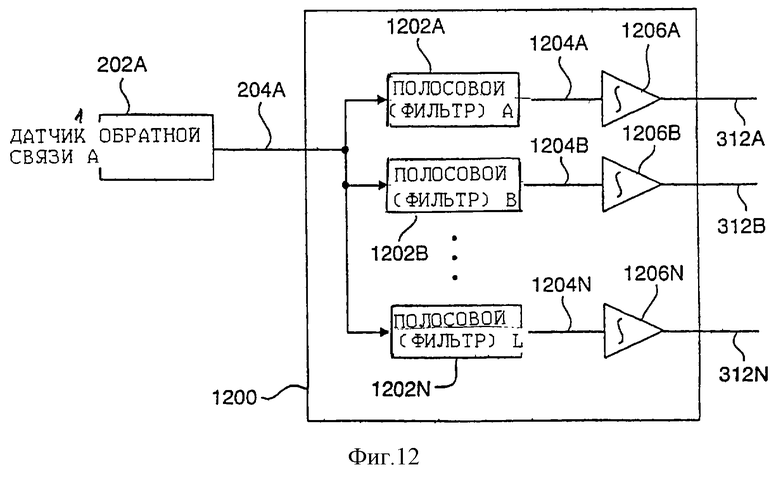
Фиг. 12 изображает генератор сигнала реакции режима согласно настоящему изобретению.
Кориолисов расходомер в общем - фиг. 1
Фиг. 1 показывает кориолисов расходомер 5, содержащий узел 10 кориолисова измерителя и измерительную электронику 20. Измерительная электроника 20 присоединена к измерительному узлу 10 проводами 100, чтобы обеспечить информацию о плотности, скорости потока массы, скорости потока по объему, обобщенном потоке массы и другую информацию по тракту 26. Описана структура кориолисова расходомера, хотя опытным специалистам понятно, что настоящее изобретение может быть использовано совместно с денситометром вибрирующей трубы без дополнительной возможности измерения, обеспеченной кориолисовым масс-расходомером. Дополнительно настоящее изобретение может быть применено к кориолисову расходомеру или денситометру с использованием более чем одного возбудителя или более чем двух датчиков.
Измерительный узел 10 включает в себя пару фланцев 101 и 101', коллектор 102 и расходомерные трубки 103А и 103В. К расходомерным трубкам 103А и 103В присоединены возбудитель 104 и датчики 105 и 105'. Связующие пластины 106 и 106' служат для определения осей W и W ', около которых совершает колебания расходомерная трубка.
Когда расходомер 10 вставляется в систему трубопровода (не показан), который переносит обрабатываемый материал, который должен быть измерен, материал поступает в измерительный узел 10 через фланец 101, проходит через коллектор 102, где материал направляется, чтобы войти в расходомерные трубки 103А и 103В, протекает через расходомерные трубки 103А и 103В, и обратно в коллектор 102, из которого он выходит из измерительного узла 10 через фланец 101'.
Расходомерные трубки 103А и 103В выбираются и соответствующим образом монтируются к коллектору 102 так, чтобы иметь по существу и то же распределение массы, моментов инерции и модулей упругости относительно осей изгиба W-W и W'-W' соответственно. Расходомерные трубки выходят наружу от коллектора по существу параллельным образом.
Расходомерные трубки 103А-103В возбуждаются возбудителем 104 в противоположных направлениях относительно их соответствующих осей изгиба W и W' и это называется первым внефазовым изгибающим режимом расходомера. Возбудитель 104 может содержать любое из многих хорошо известных устройств, таких как магнит, установленный на расходомерной трубке 103А, и противостоящая катушка, установленная на расходомерной трубке 103В, через которую пропускается переменный ток для вибрации обеих расходомерных трубок. Подходящий сигнал возбуждения подается измерительной электроникой 20 по проводнику 110 к возбудителю 104. Как было отмечено выше и описано здесь более подробно, настоящее изобретение пригодно для использование с любым количеством возбудителей. Описание фиг. 1 дается просто в качестве примера работы кориолисова расходомера и не предназначено ограничивать техническое решение настоящего изобретения.
Измерительная электроника 20 принимает левый и правый сигналы скорости, появляющиеся на проводниках 111 и 111' соответственно. Измерительная электроника 20 выдает сигнал возбуждения, появляющийся на проводнике 110 и заставляющий возбудитель 104 вызывать вибрации труб 103А и 103В. Настоящее изобретение, как описано здесь, может создавать множество сигналов возбуждения для множества возбудителей. Измерительная электроника 20 обрабатывает левый и правый сигналы скорости, чтобы вычислить скорость потока массы и плотность материала, проходящего через измерительный узел 10. Эта информация подается измерительной электроникой 20 по тракту 26 к средству использования (не показано).
Опытным специалистам известно, что кориолисов расходомер 5 полностью подобен по структуре денситометру с вибрирующей трубкой. Денситометры с вибрирующей трубкой также используют вибрирующую трубку, через которую протекает жидкость, или, в случае денситометра с отбором пробы, в которой жидкость удерживается. Денситометры с вибрирующей трубкой также применяют систему возбуждения для возбуждения вибрации расходомерной трубки. Денситометры с вибрирующей трубкой обычно используют только один сигнал обратной связи, так как измерение плотности требует только измерения частоты, а измерение фазы не нужно. Описание настоящего изобретения одинаково применимо к денситометрам с вибрирующей трубкой.
Опытные специалисты узнают, что там, где существующий кориолисов расходомер уже имеет два сигнала обратной связи, пригодные для ввода в фильтр режима, существующий денситометр вибрирующей трубкой обычно имеет только один доступный сигнал обратной связи. Таким образом, требуется только обеспечить дополнительные сигналы обратной связи в денситометре с вибрирующей трубкой, чтобы применить настоящее изобретение к денситометру с вибрирующей трубкой.
Измерительная электроника в общем - фиг. 2
Фиг. 2 изображает блок-схему измерительной электроники 20 для общего случая, где имеется L датчиков 202A-202L обратной связи и М возбудителей 206А-206М. L и М есть любые целые числа больше единицы. Измерительная электроника 20 включает в себя схему 30 скорости потока массы и схему 40 возбуждения. Схема 30 скорости потока массы является одной из многих известных схем для вычисления скорости потока массы жидкости через вибрирующую трубку на основании разности фазы между двумя точками на вибрирующей трубке. Обычно два из датчиков 202A-202L обратной связи также используются схемой 30 скорости потока массы, чтобы создать информацию о скорости потока массы, хотя датчики обратной связи, используемые схемой 40 возбуждения, могут быть отдельными от датчиков обратной связи, используемыми схемой 30 скорости потока массы. Схема 30 скорости потока массы подает выходной сигнал к средству использования (не показано) по линии 26. Средство использования может быть, например, дисплеем. Детали схемы 30 скорости потока массы хорошо известны опытным специалистам и не составляют часть настоящего изобретения. См. патент RE 31.450, выданный Смиту 29 ноября 1983 г. и переданный от его лица фирме Micro Motion, Inc., или патент США 4.879.911, выданный Золоку 14 ноября 1989 г. и переданный от его лица фирме Micro Motion, Inc., или патент США 5.231.884, выданный Золоку 3 августа 1993 г. и переданный от его лица фирме Micro Motion, Inc., для типовой информации, касающейся схемы 30 скорости потока массы. Схема 40 возбуждения принимает сигналы движения по трактам 204A-204L от датчиков 202A-202L соответственно. Схема 40 возбуждения генерирует М сигналов возбуждения по трактам 208А-208М к возбудителям 206А-202М соответственно. Работа настоящего изобретения предпочтительно использует, по меньшей мере, два сигнала движения от, по меньшей мере, двух датчиков обратной связи, считывающих движение двух разных точек на вибрирующей трубке. Работа настоящего изобретения требует, по меньшей мере, одного возбудителя. Остальная часть этого описания сосредоточена на работе схемы 40 возбуждения.
Контроллер пространственного возбуждения режима в общем - фиг. 3-4
Фиг. 3 изображает схему 40 возбуждения, включающую многоканальный фильтр 310 режима и процессор 320 сигналов реакции режима. Вибрирующая труба (трубы) 302 схематически представляет трубы 103А-103В или любую другую геометрию одной трубы или множества труб. Как отмечено выше, вибрирующая труба (трубы) 302 может быть частью вибрирующей структуры, которая включает в себя другие вибрирующие элементы. Хотя это воплощение описано относительно вибрирующей трубы (труб) 302 как целой вибрирующей структуры, понятно, как отмечено выше, что вибрирующая труба (трубы) может составлять только часть вибрирующей структуры. Сила 304 от возбудителей 206А-206М заставляет вибрирующую трубу (трубы) 302 вибрировать. По мере того, как вибрирующая труба (трубы) 302 вибрирует, движение 306 считывается датчиками 202А-202L обратной связи. Датчики 202A-202L обратной связи расположены в различных точках на вибрирующей структуре, т.е. различных точках на вибрирующей трубе (трубах) 302, и создают сигналы движения в трактах 204A-204L, которые вводятся в схему 40 возбуждения.
Сигналы движения вводятся в многоканальный фильтр 310 режима. Многоканальный фильтр 310 режима разделяет информацию о режиме сигналов движения, чтобы создать N сигналов реакции на режим по трактам 312А-312N. Фиг.4 иллюстрирует работу многоканального фильтра 310 режима. Графики 401-404 имеют вертикальные оси, представляющие собой логарифм отношения амплитуды реакции трубы к амплитуде входной силы. График 401 иллюстрирует Частотную Функцию Реакции (ЧФР, FRF) 405 для вибрирующей трубы, такой как вибрирующая труба (трубы) 302. ЧФР характеризует динамику отношения между силой, приложенной к структуре в одном местоположении, и результирующим движением структуры в другом местоположении. Так, ЧФР 405 является, например, ЧФР в местоположении одного из датчиков 202 обратной связи на вибрирующей трубе (трубах) 302. ЧФР 405 имеет информацию о режиме в режимах А, В и С в определенном диапазоне частот. Каждый из сигналов движения, генерированный датчиками 202A-202L обратной связи, имеет информацию о режиме, подобную ЧФР 405. Многоканальный фильтр 310 режима работает, чтобы разделить информацию о режиме сигналов движения, чтобы создать по существу сигналы реакции режима с Одной Степенью Свободы (ОСС, SDOF) по трактам 312A-312N, имеющие ЧФР такие, как иллюстрированные на графиках 402-404. График 402 иллюстрирует ЧФР 406, которая соответствует сигналу реакции режима по тракту 312А для режима А, или составляющей первого внефазового изгибающего режима ЧФР 405. График 403 иллюстрирует ЧФР 407, которая соответствует сигналу реакции режима по тракту 312В для режима В, или первой составляющей внефазового скручивающего режима ЧФР 405. График 404 иллюстрирует ЧФР 408, которая соответствует сигналу реакции режима по тракту 312N для режима С, или второй составляющей изгибающего внефазового режима ЧФР 405. Таким образом, вводными сигналами к многоканальному фильтру 310 режима являются L сигналов движения по трактам 204A-204L. Выводами от мнотоканального фильтра 310 режима являются N сигналов реакции режима с ОСС по трактам 312A-312N, где каждый сигнал реакции режима представляет собой информацию о режиме вибрирующей трубы (труб) 302 в одном режиме. Многоканальный фильтр 310 режима может быть конфигурирован так, чтобы производить сигналы реакции режима для любых режимов, присутствующих в рассматриваемом частотном диапазоне.
Сигналы реакции режима вводятся в процессор 320 сигналов реакции режима. Как описано более подробно в отношении фиг. 6, процессор сигналов реакции 320 режима обрабатывает сигналы реакции-режима, чтобы создать М сигналов возбуждения по трактам 208А-208М. В простейшем случае имеется только один возбудитель и поэтому только один сигнал возбуждения.
Многоканальный фильтр режима - фиг.5
Фиг. 5 есть более подробное изображение многоканального фильтра 310 режима. Многоканальный фильтр 310 режима состоит из каналов 500A-500N фильтра режима. Каналы 500A-500N фильтра режима идентичны за исключением коэффициентов усиления их соответствующих усилителей 504A-504N, 505A-505N и 506A-506N. Как описано здесь, коэффициенты усиления усилителей в каналах 500A-500N фильтра режима устанавливаются так, что каждый канал 500A-500N фильтра режима выдает один сигнал реакции режима, соответствующий одному режиму колебаний, присутствующему на вибрирующей трубе (трубах) 302. Подробно описан только один из каналов 500A-500N фильтра режима, поскольку существует полная общность между конфигурацией множества каналов.
Со ссылкой на канал 500А фильтра режима, сигналы движения от датчиков 202A-202L обратной связи вводятся в усилители 504А-506А соответственно. Усилитель 506А представляет любое количество дополнительных усилителей для приема сигналов движения от любого количества дополнительных датчиков, 202A-202L обратной связи. Усилитель 504А имеет коэффициент усиления AG1, усилитель 505А имеет коэффициент усиления AG2, усилитель 506А имеет коэффициент усиления АСL. Коэффициенты усиления AG1-AGL, называются весовыми коэффициентами, применяемыми каналом 500А фильтра режима к сигналам движения на трактах 204A-204L. Выгодные сигналы усилителей 504А-506А на трактах 507А-509А называются взвешенными сигналами обратной связи. Взвешенные сигналы обратной связи суммируются сумматором 510А, чтобы создать сигнал скорости реакции режима с ОСС по тракту 511А. Сигнал скорости реакции режима на тракте 511А вводится в интегратор 512А. Интегратор 512А интегрирует сигнал скорости реакции режима на тракте 511А, чтобы создать сигнал смещения реакции режима по тракту 312А.
Выбор весовых коэффициентов фильтра режима - фиг. 8-9
Выбор весовых коэффициентов для каждого канала многоканального фильтра 310 режима обсуждается более подробно ниже со ссылкой на фигуры 8-9. Имеются разные способы, которые можно использовать для выбора весовых коэффициентов для фильтра (фильтров) режима, присоединенного к схеме возбуждения кориолисова масс-расходомера. Средство, с помощью которого определяются весовые коэффициенты, не является критичным, и любой способ или комбинация способов пригодны и эквивалентны.
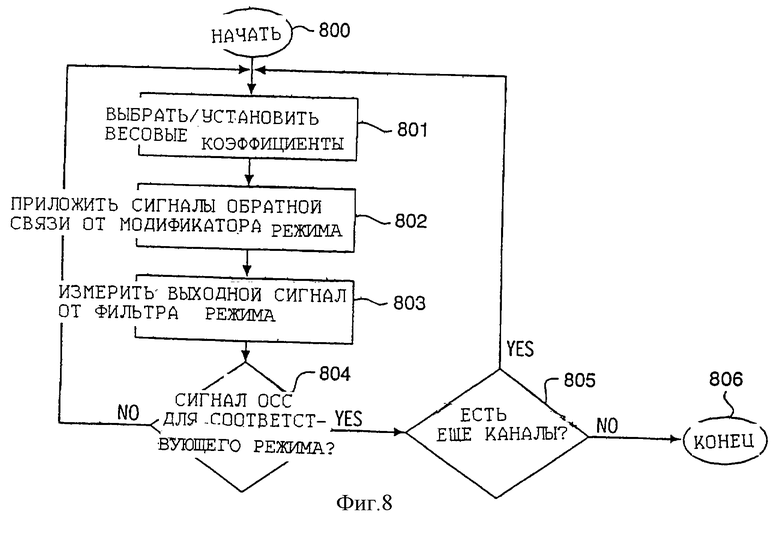
Один способ выбора весовых коэффициентов для фильтра (фильтров) режима кориолисовой схемы возбуждения есть способ проб и ошибок. Как отмечено со ссылкой на фиг. 3-5, желаемый результат многоканального фильтра 310 режима состоит в создании сигналов реакции режима с ОСС, соответствующих режимам колебаний, присутствующим на вибрирующей трубе (трубах) 302. Фиг. 8 есть блок-схема, иллюстрирующая шаги, используемые для выбора весовых коэффициентов фильтра режима для одного канала многоканального фильтра 310 режима, используя подход проб и ошибок. Шаги 801-804 повторяются, пока соответствующий сигнал реакции режима с ОСС не получится как выходной сигнал от, например, канала 500А. Шаги 801-804 выполняются с использованием действующего кориолисова расходомера, полностью обеспеченного инструментарием, чтобы обеспечить необходимые сигналы обратной связи вместе со схемой возбуждения, которая позволяет изменение коэффициентов усиления усилителей фильтра режима. Альтернативно сигналы обратной связи могут быть записаны, например, в формате Цифровой Звуковой Магнитной Ленты, и заново поданы к схеме возбуждения фильтра режима с каждым проходом через шаги 801-804. Альтернативно шаги 801-804 выполняются с использованием числовой модели кориолисова расходомера и связанной схемы возбуждения.
Процесс начинается шагом 800 и продолжается к шагу 801, где выбирается первый набор весовых коэффициентов. Во время шага 801 можно выбрать полный новый набор весовых коэффициентов (коэффициенты усиления AG1-AGN, в случае канала 500А) каждый раз, когда выполняется шаг 801, или можно выбрать новый весовой коэффициент только для одного сигнала обратной связи каждый раз, когда выполняется шаг 801. Во время шага 802 сигналы обратной связи подаются к каналу 500А, где каждый усилитель фильтра режима имеет коэффициент усиления, установленный как определено шагом 801. Во время шага 803 выходной сигнал фильтра измеряется и записывается. Обработка продолжается от шага 803 к блоку 804 выбора.
Блок 804 выбора работает, чтобы определить, является ли выходной сигнал канала фильтра сигналом реакции режима с ОСС для соответствующего режима колебаний. Если определено, с помощью работы блока 804 выбора, что сигнал, выдаваемый каналом фильтра, является существенно сигналом реакции режима с ОСС для желаемого режима колебаний, тогда обработка продолжается к блоку 805 выбора, где определяется, есть ли еще каналы в многоканальном фильтре, для которых требуются весовые коэффициенты. Если определено, что сигнал, выдаваемый каналом фильтра, не является по существу сигналом реакции режима с ОСС для желаемого режима колебаний, тогда обработка возвращается к шагу 801. Новый набор весовых коэффициентов выбирается во время шага 801, и шаги 802-804 обрабатываются снова, чтобы расположить набор весовых коэффициентов, которые производят сигнал реакции режима с ОСС. Этот процесс повторяется для каждого из каналов 500A-500N, с помощью работы блока 805 выбора, пока каждый из каналов 500A-500N не произведет сигнал реакции режима с ОСС, соответствующий одному режиму колебаний.
Другой способ выбора весовых коэффициентов для каждого канала многоканального фильтра 310 режима, это вычислить обратную или псевдообратную матрицу собственного вектора. Как отмечено выше, вибрирующая расходомерная трубка кориолисова расходомера имеет присутствующую комбинацию режимов колебаний. Анализ движения расходомерной трубки в физических координатах, например единственной реакции в отдельных точках и направлениях на расходомерной трубке, требует анализа системы уравнений, которые не легко выдают полезную информацию о движении расходомерной трубки. Однако можно использовать трансформацию режимов, чтобы преобразовать векторные или физические реакции в реакции режимов или координаты режимов системы. Стандартное преобразование режимов дается выражением:
х=Фη, (1)
где х - вектор координат физической реакции;
Ф - матрица собственного вектора, столбцы которой есть собственные векторы рассматриваемой расходомерной трубки (также называемые модальными векторами), и
η - вектор координат реакции режима.
Матрица собственных векторов может, как описано ниже, быть составлена для любой расходомерной трубки кориолисова расходомера. Физические векторы могут считаться вводными, т.е. сигналами обратной связи, к фильтру режима. Поэтому уравнение (1) решается для η, реакции координат режима, следующим образом:
η = Ф+x (2)
Выражение уравнения (1) в форме уравнения (2) требует получения псевдообратной матрицы Ф собственного вектора. Если матрица собственных векторов квадратная и невырожденная, тогда в уравнении (2) используется обратная матрица матрицы собственных векторов (Ф-1), а не псевдообратная. Матрица собственных векторов является квадратной и невырожденной, когда количество сигналов обратной связи от расходомерной трубки равно количеству рассматриваемых режимов, а векторы режимов линейно независимы.
Следующий пример используется, чтобы проиллюстрировать процесс, которым вычисляется псевдообратная матрица режима, чтобы определить весовые коэффициенты для одного канала многоканального фильтра режима. Можно использовать физическую или численную модель расходомера, чтобы построить матрицу собственных векторов. В следующем примере используется числовая модель расходомера.
Модель конечного элемента строится для труб кориолисова масс-расходомера модели CMF100 (производства фирмы Micro Motion, Inc. из Боулдера, Колорадо). Модель фиксирует к земле концы расходомерных трубок, которые на физическом расходомере присоединены к коллектору расходомера. Техника моделирования конечных элементов хорошо известна опытным специалистам и не составляет часть настоящего изобретения. Типовая модель конечных элементов была составлена с использованием идей SDRC и проанализирована с помощью MSC/NASTRAN, кода конечного элемента, доступного от МакНейла-Швендлера. Опытные специалисты в области моделирования конечных элементов знают, что альтернативно может быть использован любой код конечного элемента. Местоположения датчиков обратной связи были моделированы, чтобы создать выходной сигнал, представляющий относительное движение между местоположениями на расходомерной трубке магнита и катушки, соответствующих правому датчику, возбудителю и левому датчику. Эти "скалярные точки" являются стандартной техникой в усовершенствованном динамическом анализе. Для дополнительной информации о моделировании конечных элементов кориолисовых расходомеров см. "Конечный элемент для анализа вибрации транспортирующего жидкость луча Тимешенко" (А Finite Element for the Vibration Phalysis of a Fluid - Conveying Timeshenko Beam) (Американский институт аэронавтики и астронавтов) 93-1552).
Коэффициенты собственного значения модели CMF100 получаются из модели конечных элементов, чтобы составить следующую матрицу собственных векторов для датчика CMF100, содержащую 3 ряда на 10 столбцов:
Каждый ряд в полной матрице собственных векторов Фполн уравнения (3) соответствует физическому местоположению на расходомерной трубке. Первый ряд соответствует местоположению левого датчика, второй ряд соответствует местоположению возбудителя, и третий ряд соответствует местоположению правого датчика. Каждый столбец в полной матрице Фполн собственного вектора соответствует режиму колебаний. Эта матрица используется известным способом моделью конечных элементов, чтобы моделировать сигналы, генерируемые считывающими датчиками. Матрица используется, как описано ниже, чтобы получить весовые коэффициенты для каждого канала фильтра режима схемы возбуждения. Столбцы (режима) с нулями в полной матрице Фполн собственных векторов являются "синфазными режимами". Это означает, что нет относительного движения между трубами, потому что трубы движутся с одной и той же скоростью и в одном направлении. Таким образом, датчики, используемые, чтобы обеспечить сигналы обратной связи, датчики скорости в этом примере сами действуют как вид фильтра режима путем отфильтровывания всех синфазных режимов. Полная матрица Фполн собственных векторов уменьшается путем удаление всех синфазных столбцов.

Уравнение (4) есть сокращенная матрица Фсокр собственного вектора. Уравнение (1), стандартное преобразование режимов переписывается, используя сокращенную матрицу Фсокр собственного вектора следующим образом:
где η есть реакция координаты режима первого внефазового изгибающего режима, ηt есть реакция координаты режима первого внефазового скручивающего режима, а η2b есть реакция координаты режима второго внефазового изгибающего режима, и FSA есть физическая реакция от датчика А обратной связи, FSB есть физическая реакция от датчика В обратной связи, FSL есть физическая реакция от датчика L обратной связи. Если реакции датчиков и сокращенная матрица собственных векторов известны, реакции координат режимов могут быть определены, как показано в выражении (6), путем предварительного умножения уравнения (5) на обратную или псевдообратную матрицу сокращенной матрицы собственных векторов.

Сокращенная матрица собственных векторов инвертируется путем ввода матрицы в стандартную коммерческую математическую вычислительную оболочку, такую как Mathcad, и использования одной" из стандартных функций инвертирования или псевдоинвертирования, доступных в этих вычислительных оболочках. Полученное уравнение показано как уравнение (7):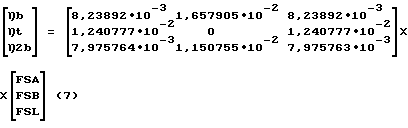
Числовые коэффициенты в уравнении (7) есть весовые коэффициенты для усилителей фильтра режима в схеме возбуждения кориолисова расходомера. Например, если желательно выделить первый внефазовый изгибающий режим из сигналов обратной связи, как в случае для канала 500А, тогда первый ряд вышеприведенной матрицы вектора фильтра режима используется следующим образом:
(8) ηb=8,2389(FSA)+16,5795(FSB)+8,2389(FSL)
Коэффициенты вектора режима первого внефазового изгибающего режима умножены на 103, чтобы упростить уравнение (8). Со ссылкой на канал 500А, фиг. 5, коэффициент усиления AG1 усилителя 504А установлен на 8,2389 (коэффициент вектора фильтра режима, соответствующий датчику А обратной связи), коэффициент усиления AG2 установлен на 16,5795 (коэффициент вектора фильтра режима, соответствующий датчику В обратной связи) и коэффициент усиления АGL установлен на 8,2389 (коэффициент вектора фильтра режима, соответствующий датчику L обратной связи). Подобным образом коэффициенты второго и третьего рядов уравнения (7) используются в качестве весовых коэффициентов для каналов 500B-N соответственно. Таким образом, каждый из каналов 500A-N создает сигнал реакции режима с ОСС, соответствующий одному режиму колебаний, присутствующему на вибрирующих трубах 302. Весовые коэффициенты линейно масштабированы как группа, чтобы обеспечить сигнал реакции режима на тракте 312А, имеющий достаточную амплитуду для ввода в процессор 320 сигналов реакции режима.
Фиг. 9 есть блок-схема, иллюстрирующая шаги процесса для определения коэффициентов фильтра режима схемы возбуждения путем вычисления обратной или псевдообратной матрицы от матрицы собственных векторов. Вычисление обратной или псевдообратной матрицы от матрицы собственных векторов, описанное выше и относительно фиг. 9, известно опытным специалистам в области усовершенствованного динамического анализа и является полезным инструментом для определения коэффициентов фильтра режима схемы возбуждения. Блок-схема с фиг.9 начинается элементом 900 и переходит к шагу 901. Во время шага 901 строится матрица собственного вектора. Как отмечено выше, способ определения собственных векторов для матрицы собственных векторов состоит в построении модели конечных элементов расходомера, из которой извлекаются собственные векторы. Другой подход состоит в использовании экспериментального анализа режимов, чтобы определить собственные векторы непосредственно из физического образца расходомера. Экспериментальный анализ режимов хорошо известен опытным специалистам и его способы и использование не образуют часть настоящего изобретения. Когда собственные векторы получены любым подходящим способом, составляется матрица собственных векторов. Уравнение (3) является примером полной матрицы собственных векторов для 10 режимов в трех точках на расходомерных трубках. Каждый столбец матрицы собственных векторов представляет разный режим, в то время как количество рядов матрицы собственных векторов представляет собой степени свободы. Матрица собственных векторов затем сокращается до режимов, которые должны быть отфильтрованы. Для данного примера это выполнено путем исключения столбцов с нулевыми коэффициентами. Для типовой структуры и описанных здесь датчиков столбцы (режимы) с нулевыми коэффициентами являются синфазными режимами. Обработка переходит от шага 901 к шагу 902.
Во время шага 902 вычисляется обратная или псевдообратная матрица собственных векторов. Каждый ряд обратной или псевдо-обратной матрицы собственных векторов содержал коэффициенты фильтра режима, связанные с конкретным режимом. Это выражено в общем уравнением (2) и показано для вышеприведенного примера уравнением (7). Обработка затем переходит к шагу 903.
Во время шага 903 выбираются весовые коэффициенты фильтра режима, как описано выше, чтобы произвести разный сигнал реакции режима с ОСС от каждого канала многоканального фильтра режима.
Генератор сигналов реакции режима - фиг. 12
ФИГ. 12 изображает генератор 1200 сигналов реакции режима. Генератор 1200 сигналов реакции режима является альтернативой многоканальному фильтру 310 режима для производства сигналов реакции режима по трактам 312A-312N. Генератор 1200 сигналов реакции режима использует частотные полосовые фильтры 1202A-1202N, чтобы разложить единственный сигнал движения от датчика А обратной связи в этом примере на сигналы реакции режима, где каждый сигнал реакции режима соответствует режиму колебаний, присутствующему на вибрирующей трубе (трубах) 302. Со ссылкой к фигурам 12 и 4, полосовой фильтр 1202А сконфигурирован, чтобы пропускать частоту А, показанную на фиг.4. Подобным образом полосовой фильтр 1202 сконфигурирован, чтобы пропускать частоту В и полосовой фильтр 1202N сконфигурирован, чтобы пропускать частоту С. Интеграторы 1206А-1206N интегрируют сигналы, отфильтрованные полосовыми фильтрами по трактам 1204A-1204N, чтобы произвести сигналы смещения из сигнала скорости, выдаваемого датчиком А обратной связи. Опытные специалисты в области фильтров временных интервалов узнают, что в полосовых фильтрах 1202A-1202N может быть использована любая из многих различных технологий фильтрации, включая технику цифровой обработки сигналов, но не ограничиваясь ею.
В дополнительном воплощении настоящего изобретения полосовые фильтры с фиг. 12 используются совместно с многоканальным фильтром режима фиг.5. Например, полосовой фильтр 1202А подключен к выходу усилителя 504А, полосовой фильтр 1202В подключен к выходу усилителя 505А и полосовой фильтр 1202N подключен к выходу усилителя 506А.
Процессор сигналов реакции режима в общем - фиг. 6
Многоканальный фильтр 310 режима или альтернативно генератор 1200 сигналов реакции режима создает N сигналов реакции режима, как уже описано, по трактам 312A-312N. Тракты 312A-312N схемы являются входами к процессору 320 сигналов реакции режима. Процессор 320 сигналов реакции режима обрабатывает N сигналов реакции режима, чтобы создать М сигналов возбуждения по трактам 208А-М.
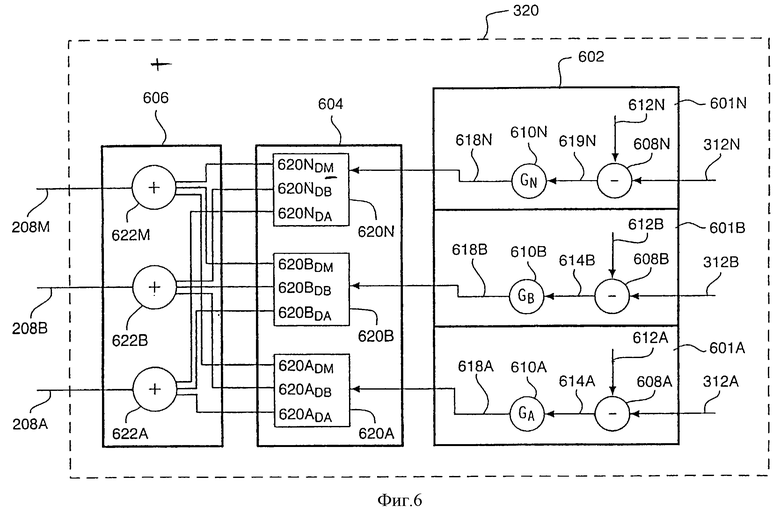
Фиг. 6 изображает блок-схему процессора 320 сигналов реакции режима. Процессор сигналов реакции режима включает контроллер 602 возбуждения, преобразователь 604 режима в физическую силу и ступень 606 суммирования. В общем контроллер 602 возбуждения принимает N сигналов реакции режима по трактам 312A-312N и для каждого сигнала реакции режима определяет отклонение сигнала реакции режима от желаемой установки для сигнала реакции режима. Это отклонение или сигнал погрешности режима усиливается усилителями 610А-61 ON с коэффициентами усиления (Ga-Gn) режима, чтобы создать сигнал возбуждения режима, который, будучи приложенным через возбудители 206А-206М к вибрирующей трубе (трубам) 302, изменяет информацию о режиме вибрирующей трубы (труб) 302 так, чтобы результирующие сигналы реакции режима приближались к их соответствующим желаемым заданным значениям режима. Сигналы возбуждения режима передаются от контроллера 602 возбуждения к преобразователю 604 режима в физическую силу по трактам 618A-618N.
Сигналы возбуждения режима по трактам 618A-618N представляют собой в сфере режима возбуждение, которое должно быть приложено к трубе (трубам) 302. Однако вибрирующая труба (трубы) 302 конечно находится в физической сфере и поэтому сигналы возбуждения режима должны быть преобразованы в требуемые физические возбуждения или силы. Это преобразование выполняется преобразователем 604 режима в физическую силу. Преобразователь 604 режима в физическую силу состоит из отдельного канала 620A-620N для каждого сигнала реакции режима. Имеется один выходной сигнал от каждого канала 620A-620N для каждого из возбудителей 206А-206М.
Выходы от преобразователя 604 режима в физическую силу подаются к ступени 606 суммирования. Выходные сигналы от преобразователя 604 режима в физическую силу суммируются как подробнее описано ниже, чтобы создать М сигналов по трактам 208A-208N.
Контроллер возбуждения - фиг.6
Контроллер 602 возбуждения состоит из одного канала 601A-601N для каждого из N сигналов реакции режима. Функция и работа каждого канала 601A-601N подобны и поэтому подробно описан только один из каналов 601A-601N. Работа остальных каналов понятна из последующего описания канала 601А. Описание контроллера 602 возбуждения организовано в первое обсуждение установок режима и второе обсуждение коэффициентов усиления режима.
Заданное значение режима
Канал 601А контроллера 602 возбуждения принимает сигнал реакции режима по тракту 312А от многоканального фильтра 310 режима. Скажем, например, что сигнал реакции-режима, обрабатываемый каналом 601А, соответствует первому внефазовому изгибающему режиму для вибрирующей трубы (труб) 302. Сигнал реакции режима вводится в ступень 608А вычитания в качестве входа вычитаемого. Уменьшаемое, вводимое в ступень 608А вычитания, есть заданное значение режима по тракту 612А. Заданное значение режима есть желаемый уровень для соответствующего сигнала реакции режима. Выходной сигнал погрешности режима по тракту 614А показывает степень, с которой сигнал реакции режима отклоняется от заданного значения режима. Заданное значение режима по тракту 612А может быть, но не ограничивается этим, фиксированным напряжением, обеспеченным опорным источником напряжения (не показан), или величиной, извлеченной из памяти (не показана).
Само заданное значение режима определяется следующим образом. Как отмечено выше в связи с уравнением 1, физическая реакция (х) системы относится к реакции (η) режима системы на величину набора векторов (Ф) режима. Физическая реакция в данном местоположении j благодаря данному режиму i представлена уравнением 9:
хi j=Фj ini, (9)
где хj i - скалярная физическая реакция в местоположении j благодаря режиму i; \\4 Фji - элемент матрицы собственных векторов для столбца режима i и ряда для местоположения j; и
ni - скалярная реакция режима i.
Уравнение 9 переписано в форме уравнения 10 и разрешено для заданного значения ηi(s) режима для режима i:
Скажем, желательно, чтобы желаемое заданное значение (хj i) физического смещения для первого внефазового изгибающего режима равнялось 0,015 дюйма у датчика А обратной связи. Ссылаясь снова на уравнение 4, элемент (Фji) матрицы, соответствующий датчику А обратной связи (первый ряд) и первому внефазовому изгибающему режиму (первый столбец), равен 25,1. Таким образом, ηi заданное значение режима для режима i (первого внефазового изгибающего режима, в этом примере) равно 0,0006.
Коэффициенты усиления режима
Ступень 608А вычитания вычитает сигнал реакции режима по тракту 312А из заданного значения режима по тракту 612А, чтобы произвести сигнал погрешности режима по тракту 614А к ступени 610А усиления. Как отмечено выше, каждый канал контроллера 602 возбуждения преобразует сигнал реакции режима в сигнал возбуждения режима, который, будучи приложенным к вибрирующей трубе (трубам) 302, заставляет вибрирующую трубу (трубы) колебаться так, чтобы сигнал реакции режима приближался к заданному значению режима для данного режима. Сигнал погрешности режима по тракту 614А усиливается ступенью 610А усиления режима. В линейной, неизменяемой по времени системе реакция режима относится к возбуждению режима параметрами системы, т.е. жесткость массы и демпфирование. В пространстве режима эти параметры являются массой режима, жесткостью режима и демпфированием режима. Для системы с нормализованными по массе собственными векторами масса режима равна единице, а жесткость режима равна квадрату собственной частоты. В системе, возбужденной в резонансе, как в случае кориолисова расходомера, номинальный коэффициент усиления, чтобы перейти от реакции режима к возбуждению режима, выражается уравнением 11:
(2ζω
где ζ - демпфирование;
ωn - частота режима;
ηi - реакция режима для режима i;
Ni- возбуждение режима для режима i.
Используя текущий пример, где заданное значение режима, т.е. желаемая реакция режима дается уравнением 11, коэффициент усиления G, примененный ступенью 610А усиления, устанавливается, как показано в уравнении 12, следующим образом:
Ступень 610А усиления поэтому конфигурируется так, чтобы иметь коэффициент усиления 445,254. Сигнал возбуждения возбудителя по тракту 618А поэтому есть сила режима колебаний, которую необходимо приложить к вибрирующей трубе (трубам) 302, чтобы сигнал реакции режима для соответствующего режима совпал с соответствующим заданным значением режима. Оставшийся шаг, как описано ниже, состоит в преобразование возбуждения режима в физические возбуждения, которые прикладываются в форме сигналов возбуждения по трактам 208А-208М. Процесс, описанный выше по отношению к каналу 601А контроллера 602 возбуждения, повторяется для каждого из остальных каналов 601В-601N для каждого из остальных сигналов реакции режима.
Отметим, что настоящее изобретение обеспечивает непосредственное средство для воздействия на один или более режимов в кориолисовом расходомере. Например, если желательно подавить определенный режим, тогда заданное значение режима для этого режима равно нулю. Таким образом, любой сигнал вообще в соответствующем сигнале реакции режима создает сигнал погрешности режима. Если желательно подавить множество режимов, тогда заданное значение режима для каждого из соответствующих режимов устанавливается в ноль. Подобным образом можно выбрать возбуждение множества режимов путем выбора подходящих заданных значений режима для каждого режима, который должен быть возбужден.
Преобразователь режима в физическим силу - фиг.7
Каждый канал 601A-601N контроллера 602 возбуждения выдает скалярный сигнал возбуждения режима, который должен быть расширен в векторный сигнал, чтобы возбудить каждый из m возбудителей. Определяется вектор проекции преобразования режима в физическую силу, каждый элемент которого есть коэффициент усиления, примененный к выгодным сигналам 618А-618N от контроллера 602 возбуждения, чтобы масштабировать скалярный сигнал возбуждения режима для каждого возбудителя до подходящей амплитуды.
Скалярный сигнал Nr возбуждения есть сила, требуемая, чтобы возбудить режим r до желаемой амплитуды реакции. Действительная сила для режима, приложенная к датчику в режиме r, есть N, как показано в уравнении 13:
Nrдейст=ФrTFrNr, (13)
где Fr - вектор физической силы, необходимой для возбуждения желаемого режима;
Nr - скалярный сигнал возбуждения режима;
ФrT- транспозиция одного столбца матрицы собственных значений режима.
Чтобы гарантировать, что Nrдейст=Nr, как это желательно, вектор физической силы Fr должен удовлетворять следующему соотношению ФrTFrNr=1. Имеется много разных векторов физической силы, которые удовлетворяют этому соотношению. Фактически любой произвольный вектор Аr, который не полностью ортогонален к Фr, т.е. ФrTFr=0, может быть масштабирован до желаемого вектора физической силы Fr следующим образом:
Fr=Ar/ФrTAr (14)
Отметим, что вектор (Fr) физической силы есть один столбец на m рядов, где каждый ряд соответствует специфическому месту возбуждения. Заметим также, что ФrT должна быть уменьшена до физических мест возбуждения. Это делает матрицу Фr7 отличной от матрицы, используемой для фильтра режима, и конфигурацию контроллера возбуждения, которая была уменьшена до местоположений датчиков обратной связи. Уравнение 14 должно быть решено для вектора (Fr) физической силы, т.е. уравнение 14 должно быть инвертировано. Это выполняется путем нахождения вектора Аr такого, что
ArTФr=1 (15)
Умножение обеих сторон уравнения 15 на вектор Аr затем дает преобразование от возбуждения режима к физической силе, как показано в уравнении 16:
ArNr=Fr (16)
Уравнение 16 есть точечное произведение двух векторов, что означает, что здесь имеется дело с векторами, а не с матрицами. Применяя определенные свойства векторов, определяем, что вектор Аr выражен, как показано в уравнении 17:
где символ || - оператор длины вектора.
Теперь показано вычисление проекции типовой силы для случая кориолисова расходомера, имеющего два возбудителя (m=2). Ссылаясь снова к уравнению 6, один из двух возбудителей расположен совпадающим с датчиком А обратной связи, а другой из двух возбудителей расположен совпадающим с датчиком L обратной связи. Для первого внефазового изгибающего режима, Аr вычисляется, как показано в уравнении 18:
Было показано по отношению к уравнениям 9-10, что заданное значение режима для первого внефазового изгибающего режима для этого примера равно 0,0006. Было показано по отношению к уравнениям 11-12, что коэффициент усиления режима для первого внефазового изгибающего режима для этого примера равен 445,254 с-2. Таким образом, заданное значение режима, умноженное на коэффициент усиления режима для первого внефазового изгибающего режима в этом примере, т.е. скалярный сигнал возбуждения режима на тракте 618А, равно 0,2672. Эти цифры подставляются в уравнение 15, чтобы определить вектор физической силы Fr для первого внефазового изгибающего режима, как показано в уравнении 19:
Этот результат говорит, что для того, чтобы возбудить датчики до желаемого первого внефазового изгибающего режима, к двум возбудителям должна быть приложена сила в 0,0106 lbs (фунта). Векторы проекции силы получаются подобным образом для каждого рассматриваемого режима, который подвергается воздействию системы возбуждения согласно настоящему изобретению.
Для того чтобы оптимизировать систему возбуждения согласно настоящему изобретению для конкретной схемы возбуждения, должны быть даны соображения к выбору подходящих векторов проекции силы. Имеется множество предметов рассмотрения, которые могут быть соображениями в выборе формы вектора. Во-первых, пиковая сила, которую должен генерировать какой-нибудь возбудитель, чтобы достичь желаемой амплитуды вибрации расходомерной трубки, которая должна быть минимизирована. Дополнительным соображением является требование минимизировать общую энергию, которую система возбуждения рассеивает при достижении желаемой амплитуды вибрации расходомерной трубки. Еще одним соображением является требование минимизировать остаточную реакцию других режимов.
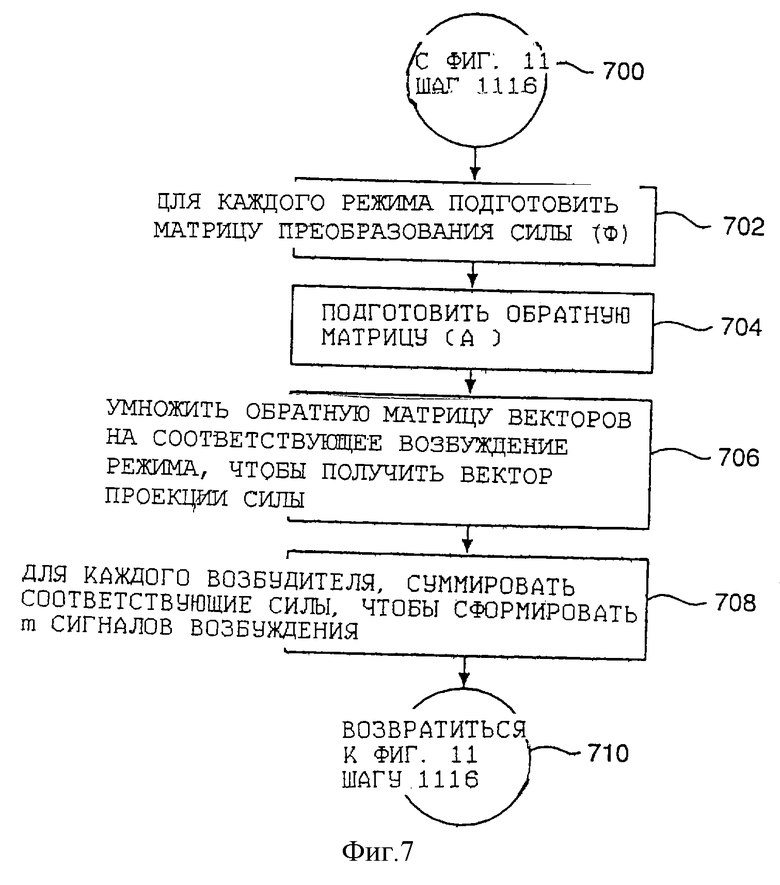
Фиг. 11 есть блок-схема, обсужденная ниже как краткое изложение настоящего изобретения. Шаг 1114 с фиг. 11, шаг преобразования силы, рассматривается более подробно на фиг. 7. ФИГ. 7 начинается шагом 700 от шага 1112 с ФИГ. 11. Как отмечено выше, имеется отдельный канал 620A-620N преобразователя силы для каждого сигнала реакции режима. Во время шага 702 матрица преобразователя силы определяется путем сокращения общей матрицы собственных векторов до одного столбца, относящегося к подходящему режиму. Обработка затем продолжается к шагу 704.
Во время шага 714 определяется обращенная матрица (Аr), как описано выше, путем использования стандартных свойств векторов. Обработка теперь переходит к шагу 706. Во время шага 706 решается уравнение 15 для вектора проекции силы (Fr). Шаги 704 и 706 имеют эффект масштабирования матрицы преобразователя силы до правильной амплитуды, как показано в уравнении 14. Обработка затем переходит к шагу 708. Во время шага 708 соответствующие силы от каждого канала преобразователя силы суммируются, чтобы создать m сигналов возбуждения. Обработка затем продолжается к шагу 710 и затем возвращается к шагу 1112 с фиг. 11.
Преобразователь 604 режима в физическую силу выполнен с использованием дискретных аналоговых компонентов, как описано относительно остальной части схемы 40 возбуждения. Альтернативно преобразователь 604 режима в физическую силу и остальная часть схемы 40 возбуждения выполнена с использованием Аналого-Цифровых Преобразователей (АЦП, ADC), чтобы преобразовать аналоговые сигналы движения в цифровые сигналы. Цифровые сигналы затем обрабатываются с использованием техники обработки цифровых сигналов (ОЦС; DSP), и полученные сигналы возбуждения преобразуются обратно в аналоговые сигналы с использованием Цифро-Аналоговых Преобразователей (ЦАП, DAC). Опытные специалисты в области электронной обработки сигналов осознают, что иного различных аналоговых или цифровых (АЦП, ОЦС, ЦАП) подходов может быть использовано, чтобы осуществить идею настоящего изобретения, и все они эквивалентны и находятся в рамках эквивалентов для настоящего изобретения.
Ступень суммирования - фиг. 6
Сигналы, выдаваемые из преобразователя 604 режима в физическую силу, суммируются в ступени 606 суммирования, чтобы создать сигналы 208А-208М возбуждения следующим образом. Как отмечено выше, каждый канал 620А-620N преобразователя 604 режима в физическую силу создает столько выходных сигналов (М), сколько имеется возбудителей 206. Все выходные сигналы преобразователя 604 режима в физическую силу, соответствующие возбудителю А, например, суммируются сумматором 622А, чтобы создать сигнал возбуждения 208А. Таким образом, выход 620АDA, выход 620ВDA и выход 620NDА все подаются к сумматору 622А. Выход сумматора 622А есть сигнал возбуждения 208А. Сигналы 208B-208N возбуждения формируются подобным образом с помощью работы сумматоров 622В-622М. Количество возбудителей М может отличаться от количества сигналов N реакции режима, которое может отличаться от количества сигналов L движения.
Множество рабочих конфигураций - фиг. 10
Уникальная конструкция системы возбуждения настоящего изобретения позволяет значительные и полные изменения в схемах возбуждения простым выбором различного набора заданных значений режимов. Обобщенная система управления возбуждением в пространстве режимов колебаний согласно настоящему изобретению работает в разных рабочих конфигурациях путем установки различных заданных значений режимов для каждой рабочей конфигурации. Например, первый режим работы для расходомера 5 есть конфигурация потока массы. В конфигурации потока массы, для примера, расходомера 5, фиг. 1, первый внефазовый изгибающий режим возбуждается, а другие режимы подавляются. Вторая конфигурация для расходомера 5 - это конфигурация измерения давления. В конфигурации измерения давления, первый внефазовый изгибающий режим и первый внефазовый скручивающий режим оба возбуждаются, а другие режимы подавляются. Расходомер 5 переключается между первой и второй рабочими конфигурациями, и его схема возбуждения оптимизируется для каждого режима.
Фиг. 10 есть подобное фиг.6 изображение процессора 320 сигналов реакции режима, но с добавлением памяти 1002 и селектора 1004 рабочей конфигурации. Память 1002 есть постоянное запоминающее устройство (ПЗУ, ROM). В память 1002 загружена таблица установок заданных значений режимов (не показана). Таблица заданных значений режимов включает набор из N заданных значений режимов для каждой конфигурации расходомера. Каждый набор из N заданных значений режимов включает заданное значение режима, соответствующее N сигналам реакции режима. Селектор 1004 рабочих конфигураций обеспечивает сигнал управления по тракту 1006 к памяти 1002, который определяет набор заданных значений режимов, выдаваемый памятью 1002 по трактам 612A-N. Селектор 1004 рабочей конфигурации и память 1002 предпочтительно являются частью измерительной электроники 20. Селектор 1004 рабочей конфигурации может, например, быть микропроцессором (не показан) в измерительной электронике 20. Переключение от первой рабочей конфигурации к одной или более альтернативным рабочим конфигурациям может быть выполнено любым количеством путей и не важно для настоящего изобретения. Один пример это то, что селектор 1004 рабочей конфигурации может быть сконфигурирован так, чтобы переключать каждые тридцать секунд между первой рабочей конфигурацией и второй рабочей конфигурацией. Другим примером может быть такой, что селектор 1004 рабочей конфигурации может быть сконфигурирован так, что первая рабочая конфигурация является рабочей конфигурацией по умолчанию, и что вторая рабочая конфигурация используется только тогда, когда, например, пользователь нажмет кнопку (не показана), запрашивая измерение давления расходомером 5. Кроме того, первая рабочая конфигурация может быть всегда в действии, а вторая рабочая конфигурация периодически используется в дополнение к первой рабочей конфигурации.
Краткое изложение (резюме) - фиг. 11
Фиг. 11 есть блок-схема краткого итогового описания системы возбуждения согласно настоящему изобретению. Шаги 1102-1106 касаются преобразования физического движения вибрирующей трубы в сигналы реакции режима с ОСС. Шаги 1108-1112 работают в сфере режима, чтобы генерировать сигналы возбуждения режима из сигналов реакции режима. Именно в сфере режима обрабатываются сигналы, чтобы влиять на режимы колебаний. Шаги 1114-1118 действуют, чтобы преобразовать сигналы возбуждения режима в физическую величину, согласовать сигналы возбуждения с возбудителями и приложить сигналы возбуждения к возбудителю (возбудителям).
Обработка начинается шагом 1102, когда кориолисов расходомер или денситометр начинает работу. В шаге 1104 L сигналов движения принимаются от L датчиков обратной связи, показывающих движение различных точек вдоль вибрирующей трубы. Во время шага 1106 N сигналов реакции режима генерируются из L сигналов движения. Каждый сигнал реакции режима, обычно сигнал ОСС, соответствует одному режиму вибрации, присутствующему на вибрирующей трубе. N сигналов реакции режима вводятся в N-канальный контроллер возбуждения во время шага 1108.
Во время шага 1110 сигнал погрешности режима генерируется для каждого сигнала реакции режима путем приложения каждого сигнала реакции режима к его соответствующему заданному значению режима. Сигнал погрешности режима усиливается на коэффициент усиления режима, во время шага 1112, чтобы создать сигнал возбуждения режима для каждого режима.
Во время шага 1114 каждый сигнал возбуждения режима преобразуется в вектор физической силы, где каждый элемент вектора физической силы соответствует одному из возбудителей. Шаг 1114 описывается более подробно на фиг. 7. Обработка далее переходит к шагу 1116, где m сигналов возбуждения прикладываются к m возбудителям, заставляя вибрирующую трубу вибрировать в желаемых режимах. Обработка завершается шагом 1118.
Хотя здесь описаны специфические воплощения, ожидается, что" опытные специалисты смогут спроектировать и спроектируют альтернативные системы управления возбуждения, которые находятся в рамках последующих пунктов формулы изобретения либо буквально, либо согласно доктрины эквивалентов.





На схему возбуждения поступает L сигналов движения от L датчиков, присоединенных к трубке Кориолисового расходомера или денситометра, приводимой в колебание М возбудителями (М и L - целые числа больше 1). Сигналы фильтруются многоканальным фильтром схемы, вырабатывающим N сигналов реакции режима колебаний. Каждый из N сигналов представляет собой величину колебаний трубки в одном из множества различных режимов и обрабатывается в соответствующем канале контроллера возбуждения схемы для выработки сигнала возбуждения режима колебаний. Полученные сигналы преобразуют в М сигналов возбуждения, поступающих на М возбудителей. Изобретения обеспечивают возможность управления возбуждением расходомерной трубки для получения желаемого режима колебаний. 2 с. и 19 з.п. ф-лы, 12 ил.
| DE 19634663 А1, 06.03.1997 | |||
| US 5024104 А, 18.06.1991 | |||
| US 5009109 А, 23.04.1991 | |||
| US 4934196 А, 19.06.1990 | |||
| Массовый вибрационный расходомер | 1989 |
|
SU1765699A1 |
