Область изобретения
Данное изобретение относится к датчикам параметров процесса и способам их работы, в частности, к датчикам параметров вибрирующих трубопроводов и способам их работы.
Существующий уровень техники
Обычно массовые расходомеры, основанные на эффекте Кориолиса, используются для измерения массового расхода и иной информации для веществ, протекающих через трубопровод. Примеры кориолисовых расходомеров раскрыты в патентах США №4109524 от 29 августа 1978, 4491025 от 01 января 1985 и Re.31,450 от 11 февраля 1982, все выданы на имя J.Е.Smith et al. Эти расходомеры обычно включают в себя один или более трубопроводов, имеющих прямую или изогнутую конфигурацию. Каждый трубопровод может рассматриваться как имеющий набор собственных мод колебаний, в том числе, например, простого изгибного, крутильного, радиального и спаренного типа. В обычном применении измерений с помощью расходомера каждый трубопровод возбуждается, чтобы колебаться при резонансе в одной из этих собственных мод, когда через расходомер протекает вещество. Моды колебаний вибрирующей заполненной веществом системы определяются объединенной массой, характеристиками жесткости трубопроводов и характеристиками вещества, протекающего внутри этих трубопроводов.
Типичным компонентом кориолисова расходомера является система возбуждения или возбуждающая система. Система возбуждения действует так, чтобы периодически прикладывать физическую силу к трубопроводу, что заставляет этот трубопровод колебаться. Система возбуждения обычно включает в себя по меньшей мере один исполнительный механизм, установленный на трубопроводе(ах) расходомера. Этот исполнительный механизм обычно содержит одно из многих известных электромеханических устройств, таких как устройство со звуковой катушкой, имеющее магнит, установленный на первом трубопроводе, и проволочную катушку, установленную на втором трубопроводе напротив магнита. Возбуждающая схема непрерывно прикладывает периодический, например, синусоидальный или прямоугольный, сигнал возбуждения к катушке исполнительного механизма. Этот периодический сигнал возбуждения заставляет исполнительный механизм возбуждать два трубопровода периодически в противоположных направлениях, и этот порядок затем поддерживается.
Когда через возбужденный трубопровод расходомера имеется в действительности "нулевой" расход, точки вдоль этого трубопровода стремятся колебаться приблизительно с одной и той же фазой или фазой "нулевого расхода" по отношению к возбудителю, в зависимости от моды возбуждаемого колебания. Когда из впускного отверстия расходомера через трубопровод и наружу из выпускного отверстия расходомера начинает протекать вещество, возникающие из-за потока вещества кориолисовы силы стремятся внести фазовый сдвиг между пространственно разнесенными точками вдоль трубопровода. В общем случае при протекании вещества через трубопровод фаза на впускной стороне трубопровода отстает от возбудителя, тогда как фаза на выпускной стороне трубопровода опережает возбудитель. Фазовый сдвиг, наведенный между двумя местоположениями на трубопроводе, приблизительно пропорционален массовому расходу вещества через трубопровод.
Движение кориолисова расходомера можно смоделировать как суперпозицию множества мод колебаний, т.е. как движение множества независимых систем с единственной степенью свободы (СЕСС) (SDOF), причем соответствующая система СЕСС характеризуется естественной частотой и демпфированием. Типичной одной из мод, присутствующих в двухтрубопроводном кориолисовом расходомере, является первая несинфазная изгибная мода, например, мода, в которой две трубы кориолисова расходомера колеблются противоположно друг другу. В типичном вибрационном трубопроводном кориолисовом расходомере можно также идентифицировать и другие моды, включая первую несинфазную крутильную моду, которая в общем случае присуща кориолисовым силам, генерируемым веществом, проходящим через трубопроводы, а также синфазную, боковую и иные моды колебаний, возбуждаемые исполнительным механизмом расходомера и другими вибрационными источниками, соединенными с расходомером.
Для выработки сигналов возбуждения, которые обеспечивают желательные характеристики мод, предложены разные методы. Один метод состоит в получении коэффициентов проекций сил, которые создают сигнал возбуждения для исполнительного механизма, предпочтительным образом возбуждающие желательную моду колебаний. Второй метод состоит в генерировании сигналов возбуждения для нескольких исполнительных механизмов, чтобы предпочтительным образом возбуждать одну или более желательных мод колебаний трубопровода кориолисова расходомера.
Вышеуказанные методы обычно используют заданный фильтр мод для генерирования коэффициентов проекций сил. Этот заданный фильтр мод обычно генерируется автономно с помощью классических методов экспериментального анализа мод колебаний или конечно-элементного моделирования. Коэффициенты проекций сил могут быть затем определены из фильтра мод с помощью метода проб и ошибок, обратного преобразования мод или иных методов.
К сожалению, заданный фильтр мод может не принимать во внимание изменения в характеристиках датчика, которые могут произойти со временем. Вдобавок, обычные методы не принимают во внимание местные (in situ) эффекты, возникающие из-за взаимодействий между датчиком и системой технологической обработки вещества, в которой этот датчик действует. К примеру, дополнительные моды колебаний могут возбуждаться конструктивной связью с системой технологической обработки вещества или источниками вибрации в системе технологической обработки вещества, такими как насосы.
Сущность изобретения
В свете вышесказанного цель настоящего изобретения состоит в создании датчиков с автоматическим определением параметров типа вибрирующих трубопроводов и способов их работы, которые могут обеспечить более точную оценку параметра процесса, например, массового расхода, в системе технологической обработки вещества.
Другая цель настоящего изобретения состоит в создании датчиков, определяющих параметры типа вибрирующих трубопроводов и способов их работы, которые могут обеспечить более точную характеристику поведения датчиков.
Еще одна цель настоящего изобретения состоит в создании датчиков, определяющих параметры типа вибрирующих трубопроводов и способов их работы, которые способны к (in situ) характеристике поведения датчиков по месту.
Эти и другие цели, признаки и преимущества обеспечиваются согласно настоящему изобретению датчиками параметров типа вибрирующих трубопроводов, которые включают в себя блок оценки параметра мод колебаний, выполненный с возможностью приема сигналов движения, представляющих движение трубопровода с датчиком во множестве местоположений, и действующий для оценивания параметра мод колебаний, например параметра фильтра мод или параметра проекций сил, из принятых сигналов движения. Согласно аспекту модифицированных обращенных векторов мод колебаний (MRMV) согласно настоящему изобретению параметр фильтра мод оценивается путем возбуждения трубопровода по диапазону частот, генерирования матрицы функций частотных характеристик (ФЧХ) (FRF) по диапазону частот и генерирования оценки параметра фильтра мод из матрицы ФЧХ. Оценка параметра фильтра мод может генерироваться во время процедуры инициализации или калибровки. Согласно аспекту адаптивной фильтрации мод колебаний определяется ошибка оценки характеристики мод колебаний в фильтре мод по отношению к эталонной характеристике мод колебаний, и эта ошибка используется для генерирования новой оценки параметра фильтра мод. Параметры фильтра мод и параметры проекций сил могут, таким образом, адаптивно обновляться, пока датчик находится в действии.
В частности, согласно настоящему изобретению, датчик с автоматическим определением для измерения параметра процесса системы технологической обработки вещества включает в себя трубопровод, выполненный с возможностью удерживать вещество из системы технологической обработки вещества, и множество измерительных преобразователей движения, работающих для выработки множества сигналов движения, представляющих движение во множестве местоположений на трубопроводе. Блок оценки параметра мод колебаний выполнен с возможностью приема множества сигналов движения и действует для оценки параметра мод колебаний из принятого множества сигналов движения. Параметр мод колебаний, например, параметр фильтра мод или параметр проекций сил, связывает поведение трубопровода с поведением системы с единственной степенью свободы (СЕСС). Блок оценки параметра процесса выполнен с возможностью приема множества сигналов движения, реагирующих на блок оценки параметра мод колебаний и действующих для оценки параметра процесса для системы технологической обработки вещества из принятого множества сигналов движения согласно оценке параметра мод колебаний.
Согласно аспекту оценки модифицированных обращенных векторов мод колебаний (MRMV) по настоящему изобретению трубопровод с датчиком возбуждается по диапазону частот. Принимается множество сигналов движения, представляющих движение в ответ на возбуждение, и из принятого множества сигналов движения определяется множество частотных характеристик для множества местоположений по диапазону частот. Оценка параметра фильтра мод для датчика генерируется из найденного множества частотных характеристик.
Матрица функций частотных характеристик (ФЧХ) определяется из множества частотных характеристик. Идентифицируется полюс, соответствующий моде датчика, и из идентифицированного полюса генерируется вектор СЕСС. Затем генерируется оценка параметра фильтра мод из оценки матрицы ФЧХ и оценки вектора СЕСС.
Согласно аспекту адаптивной фильтрации мод колебаний по настоящему изобретению определяется возбуждение, приложенное к трубопроводу с датчиками и приложенное к эталонной системе мод колебаний для генерирования эталонной характеристики мод колебаний. Фильтр мод применяется ко множеству сигналов движения, представляющих движение в ответ на возбуждение, для генерирования оценки характеристики мод колебаний согласно оценке параметра фильтра мод. Новая оценка параметра фильтра мод генерируется на основе ошибки оценки характеристики мод колебаний по отношению к эталонной характеристике мод колебаний. Новые оценки параметра мод колебаний могут генерироваться итеративно до тех пор, пока ошибка оценки характеристики мод колебаний по отношению к эталонной характеристике мод колебаний не придет в соответствие с заданным критерием. Тем самым обеспечиваются усовершенствованные датчики параметров и способы их работы.
Перечень фигур чертежей
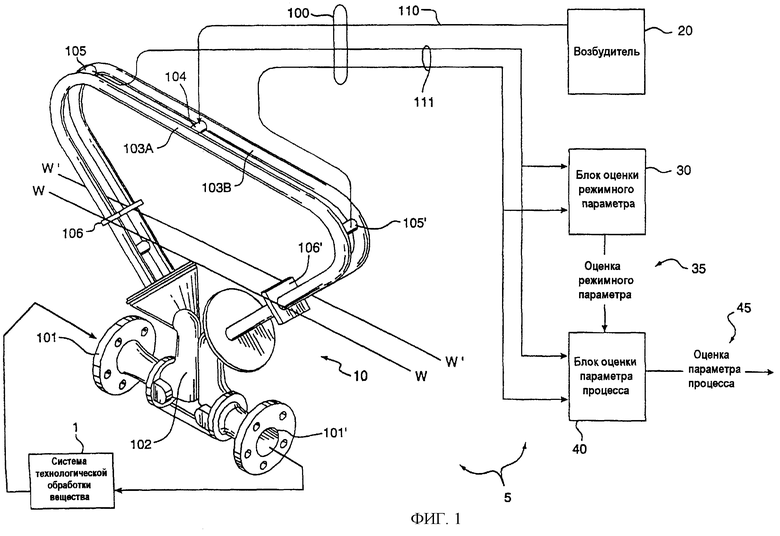
Фиг.1 иллюстрирует пример выполнения датчика параметров согласно настоящему изобретению.
Фиг.2 иллюстрирует пример выполнения блока оценки параметра мод колебаний согласно настоящему изобретению.
Фиг.3 иллюстрирует действия для оценки параметра мод колебаний согласно настоящему изобретению.
Фиг.4 иллюстрирует пример выполнения датчика параметров согласно настоящему изобретению.
Фиг.5 иллюстрирует пример выполнения датчика параметров согласно настоящему изобретению, использующего метод оценки модифицированных обращенных векторов мод колебаний (MRMV).
Фиг.6 иллюстрирует действия для оценивания параметра фильтра мод согласно аспекту MRMV по настоящему изобретению.
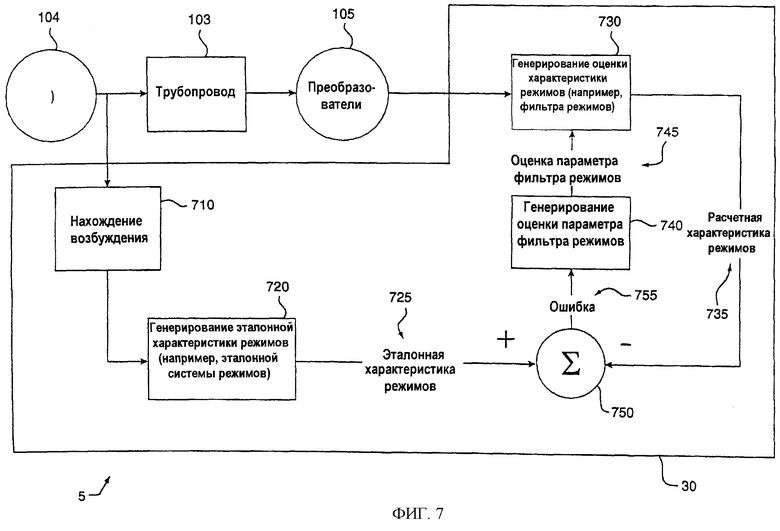
Фиг.7 иллюстрирует пример выполнения согласно настоящему изобретению, использующего метод адаптивной фильтрации мод.
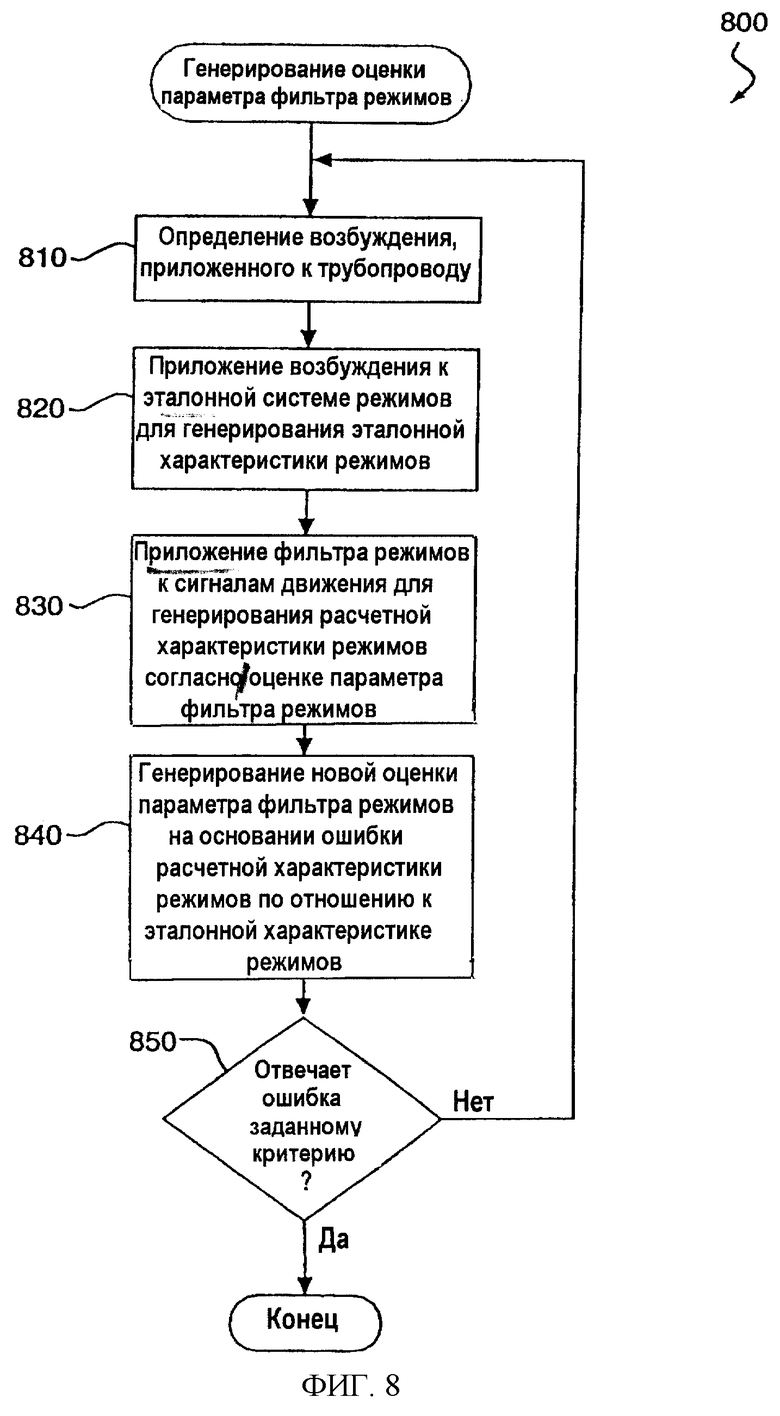
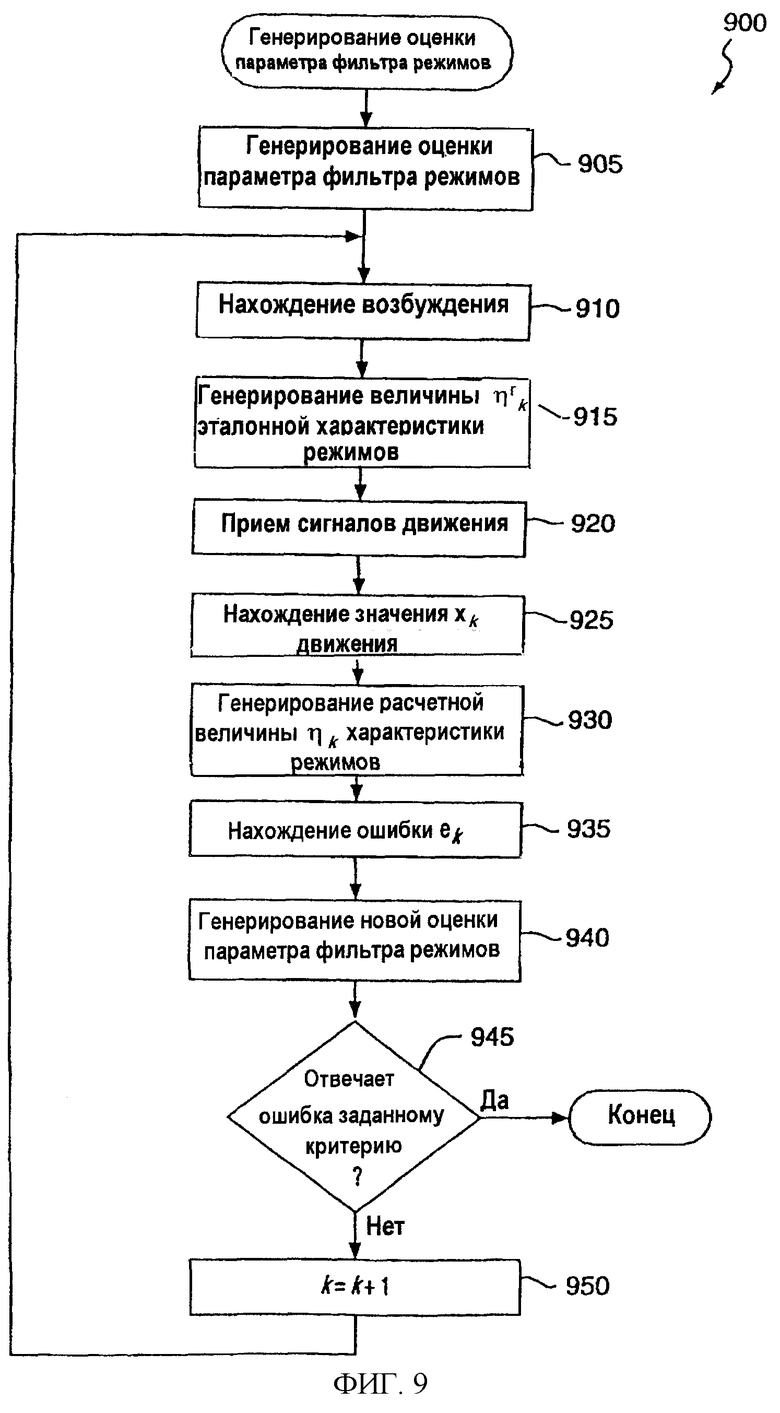
Фиг.8 и 9 иллюстрируют действия для оценивания параметра фильтра мод согласно аспектам адаптивной фильтрации мод по настоящему изобретению.
Подробное описание вариантов выполнения
Настоящее изобретение будет теперь описано полностью со ссылками на сопровождающие чертежи, на которых показаны варианты выполнения изобретения. Специалисты оценят, что изобретение может быть воплощено во множестве различных форм и не должно ограничиваться изложенными здесь вариантами выполнения; скорее, эти варианты выполнения представлены так, чтобы данное раскрытие было тщательным и полным и полностью представляло объем изобретения для специалистов. На всех чертежах одинаковые ссылочные позиции относятся к одинаковым элементам.
Нижеследующее обсуждение ссылается на кориолисовы расходомеры, в которых параметр процесса в системе технологической обработки вещества, как правило, удельный массовый расход, оценивается для вещества, например, текучего, протекающего через вибрирующий трубопровод, выполненный с возможностью вмещать вещество, которое проходит через этот вибрирующий трубопровод как часть системы технологической обработки вещества. Специалисты, однако, поймут, что настоящее изобретение применимо также к другим датчикам параметра процесса с вибрирующим трубопроводом, нежели встроенные в линию датчики. Например, настоящее изобретение применимо к плотномерам с вибрационной трубкой с отбором образцов, которые включают в себя трубопровод, выполненный с возможностью удерживать образец вещества, выделенного из системы технологической обработки вещества.
Фиг.1 иллюстрирует примерное выполнение датчика 5 параметра процесса согласно настоящему изобретению. Этот датчик 5 параметра включает в себя трубопроводный узел 10. Этот трубопроводный узел 10 включает в себя впускной фланец 101, выпускной фланец 101', патрубок 102 и первый и второй трубопроводы 103А, 103В. Крепежные планки 106, 106' соединяют трубопроводы 103А, 103В. С трубопроводами 103А, 103В соединен исполнительный механизм 104 и первый и второй преобразователи 105, 105' движения, соединенные с выводами 100. Исполнительный механизм 104 действует для задания вибрации трубопроводам 103А, 103В, реагирующим на сигнал возбуждения, поданный возбудителем 20 на вывод 110 возбуждения. Первый и второй преобразователи 105, 105' движения действуют для выработки сигналов движения, представляющих движение пространственно разнесенных местоположений на трубопроводах 103А, 103В, на выводы 111 преобразователей. Первый и второй преобразователи 105, 105' движения могут включать в себя разнообразные устройства, такие как преобразователи смещения катушечного типа, оптические или ультразвуковые датчики движения, акселерометр, инерционные датчики скорости и т.п.
Когда трубопроводный узел 10 вводится в систему 1 технологической обработки вещества, вещество, протекающее по магистрали в системе 1 технологической обработки вещества, входит в трубопроводный узел 10 через впускной фланец 101. Затем это вещество протекает через патрубок 102, где оно направляется в расходомерные трубки 103А, 103В. После выхода из расходомерных трубок 103А, 103В вещество течет назад в патрубок 102 и покидает измерительный узел 10 через выпускной фланец 101'. Когда вещество протекает через трубопроводы 103А, 103В, оно увеличивает кориолисовы силы, которые возмущают трубопроводы 103А, 103В.
Трубопроводы 103А, 103В обыкновенно возбуждаются исполнительным механизмом 104 в противоположных направлениях относительно их соответствующих изгибных осей W-W и W'-W', вызывая то, что обычно называется первой несинфазной изгибной модой в трубопроводном узле 10. Исполнительный механизм 104 может содержать любое из множества общеизвестных устройств, такое как линейный исполнительный механизм, включающий в себя магнит, установленный на первом трубопроводе 103А, и противоположную ему катушку, установленную на второй расходомерной трубке 103В. Переменный ток, наводимый сигналом возбуждения, поданным возбудителем 20 по выводу 110 возбуждения, проходит через катушку, генерирующую механическую силу, которая заставляет вибрировать трубопроводы 103А, 103В. Хотя датчик 5 параметра, проиллюстрированный на фиг.1, показан содержащим интегральный исполнительный механизм 104, специалисты поймут, что вибрация трубопроводов 103А, 103В согласно настоящему изобретению может достигаться иными методами, такими как путем возбуждения, генерируемого извне для трубопроводного узла 10 и переносимого в трубопроводный узел 10 через жидкость или механическую связь.
Поведение такого датчика параметра, как датчик 5 параметра на фиг.1, может быть описан в терминах мод колебаний. Преобразование мод колебаний, т.е. фильтр мод, преобразует физические характеристики в характеристики мод колебаний. Стандартное преобразование мод задается выражением

где x является вектором физических характеристик, Ф является матрицей собственных векторов, а η является вектором характеристик мод колебаний. Вектор x физических характеристик можно представить себе как входные сигналы, т.е. сигналы обратной связи, для фильтра Ф мод. Решая уравнение (1) для η, получим характеристики мод:

где  является обобщенной обратной матрицей матрицы Ф. Если матрица Ф является квадратной и невырожденной, в уравнении (2) можно использовать обратную матрицу Ф-1. Матрица собственных векторов является квадратной и невырожденной, когда векторы мод являются линейно независимыми, а число местоположений на трубопроводе с датчиком, для которого обеспечивается информация движения, равно числу рассматриваемых мод колебаний.
является обобщенной обратной матрицей матрицы Ф. Если матрица Ф является квадратной и невырожденной, в уравнении (2) можно использовать обратную матрицу Ф-1. Матрица собственных векторов является квадратной и невырожденной, когда векторы мод являются линейно независимыми, а число местоположений на трубопроводе с датчиком, для которого обеспечивается информация движения, равно числу рассматриваемых мод колебаний.
На фиг.1 датчик 5 параметров включает в себя также блок 30 оценки параметра мод колебаний и блок 40 оценки параметра процесса.
Блок 30 оценки параметра мод колебаний реагирует на первый и второй сигналы движения, принятые от первого и второго преобразователей 105, 105' движения на выводах 111 преобразователей. Эти сигналы движения представляют движение трубопроводов 103А, 103В в физической области, например, сигналы, представляющие смещение, скорость или ускорение, когда вещество протекает через трубопроводный узел 10. Блок 30 оценки параметра мод колебаний обрабатывает принятые сигналы движения для генерирования такой оценки параметра мод колебаний, как параметр фильтра мод или параметр проекций сил, который связывает поведение трубопровода в пространственной области с поведением, по меньшей мере, одной системы с единственной степенью свободы (СЕСС) в области мод колебаний. Блок 40 оценки параметра процесса также выполнен с возможностью принимать сигналы движения и реагирует на оценку параметра 35 мод колебаний для оценки параметра процесса, например, удельного массового расхода, обобщенного массового расхода, плотности и т.п., связанного с веществом, протекающим через трубопроводный узел 10.
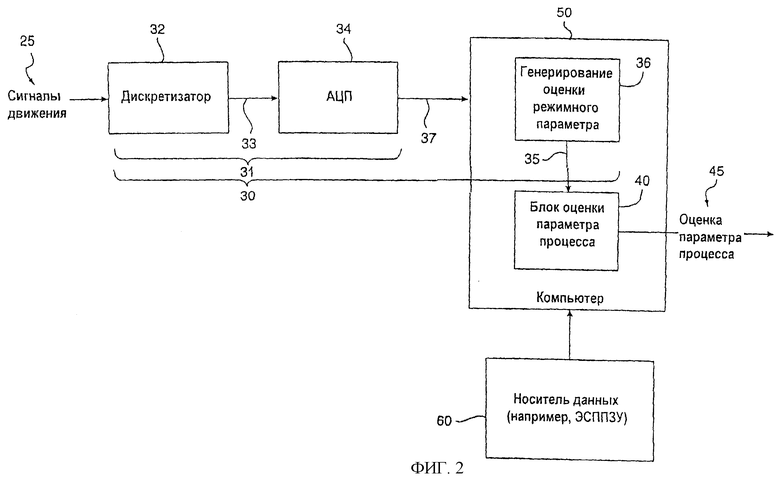
Фиг.2 иллюстрирует примерное выполнение блока 30 оценки параметра мод колебаний и блока 40 оценки параметра процесса. Как представлено, этот блок 30 оценки параметра мод колебаний включает в себя дискретизатор 32, к примеру, схему выборки и хранения или аналогичную схему, и аналого-цифровой преобразователь (АЦП) 34. Дискретизатор 32 и АЦП 34 обеспечивают средство 31 для приема сигналов 25 движения преобразователей движения, выработанных первым и вторым преобразователями 105, 105' движения, для дискретизации этих сигналов 25 движения и получения из них выборок 33, которые преобразуются в цифровые значения 37 посредством аналого-цифрового преобразователя 34. Подробная работа проиллюстрированных дискретизатора 32 и АЦП 34 может выполняться несколькими схемами, известными специалистам и не нуждается в более подробном рассмотрении здесь. Специалисты поймут, что приемное средство 31, представленное на фиг.2, можно воплотить несколькими способами, включая дополнительную фильтрацию для подавления помех перед дискретизацией, фильтрацию после дискретизации и т.п. Понятно также, что в общем случае приемное средство 31, представленное на фиг.2, можно воплотить с помощью аппаратного обеспечения специального назначения, встроенного программного обеспечения или программного обеспечения, выполняемого на специальных или универсальных устройствах обработки данных либо их комбинации.
Части блока 30 оценки параметра мод колебаний можно воплотить в компьютер 50, например, микропроцессор, микроконтроллер, процессор цифровых сигналов (ПЦС) (ОЗР) или тому подобное. Например, компьютер 50 может включать в себя конвейерный ПЦС, приспособленный для линейных алгебраических вычислений, такой как ПЦС семейства TMS320C4X процессоров цифровых сигналов, продаваемых Texas Instruments, Inc. Настроенный с помощью соответствующего программного кода, например, программного обеспечения и/или встроенного программного обеспечения, и данных, хранящихся, к примеру, в носителе 60 данных, таком как оперативное запоминающее устройство (ОЗУ) (RAM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) (EEPROM), магнитный диск или тому подобное, компьютер 50 обеспечивает средство 36 для генерирования оценки 35 параметра фильтра мод из значений 37 цифровых сигналов. Части блока 40 оценки параметра процесса также могут быть воплощены компьютером 50 и связанным с ним программным кодом. Например, в компьютере 50 может выполняться программный код, приспособленный к линейным алгебраическим вычислениям, для воплощения фильтра мод, а также код для генерирования цифровых сигналов для возбуждения исполнительного механизма возбудителем 104.
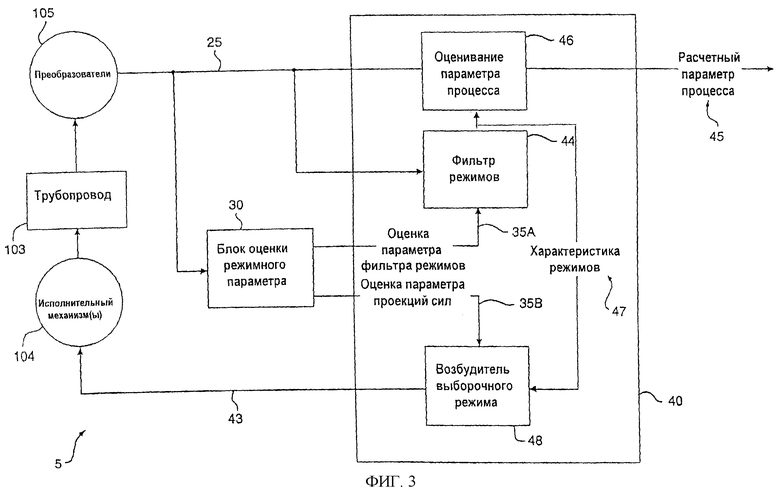
Как описано выше, блок 40 оценки параметра процесса по фиг.1 выполнен с возможностью приема сигналов движения от преобразователей движения и действует для оценивания параметра процесса, связанного с веществом, протекающим через трубопроводы 103А, 103В, согласно оценке параметра 35 мод колебаний. Фиг.3 иллюстрирует вариант выполнения согласно настоящему изобретению, в котором блок 40 оценки параметра процесса включает в себя фильтр 44 мод, который действует для фильтрации сигналов 25 движения, представляющих физическую характеристику трубопровода 103, и реагирует на оценку 35а параметра фильтра мод, поданную блоком 30 оценки параметра мод колебаний. Фильтр 44 мод вырабатывает характеристику 47 мод, представляющую отображение физической характеристики в область мод колебаний. Селективный возбудитель 48 мод реагирует на фильтр 44 мод и блок 40 оценки параметра мод колебаний, вырабатывая один или более сигналов 43 возбуждения согласно характеристике 47 мод и параметру 35b проекций сил, поданному блоком 30 оценки параметра мод колебаний.
Один или более сигналов 43 возбуждения могут проектироваться для предпочтительного возбуждения одной или более мод колебаний для трубопровода 103, чтобы обеспечить улучшенные измерения. Средство 46 оценивания параметра процесса генерирует оценку 45 параметра процесса, например, массовый расход, плотность и т.п. из сигналов 25 движения, вырабатываемых преобразователями 105, с помощью, например, обычной кориолисовой схемы определения скорости расхода, описанной в патенте США Re 31450 на имя Smith, патенте США 4879911 на имя Zolock и патенте США 5231884 на имя Zolock. Альтернативно оценка параметра процесса может генерироваться из характеристики 47 мод.
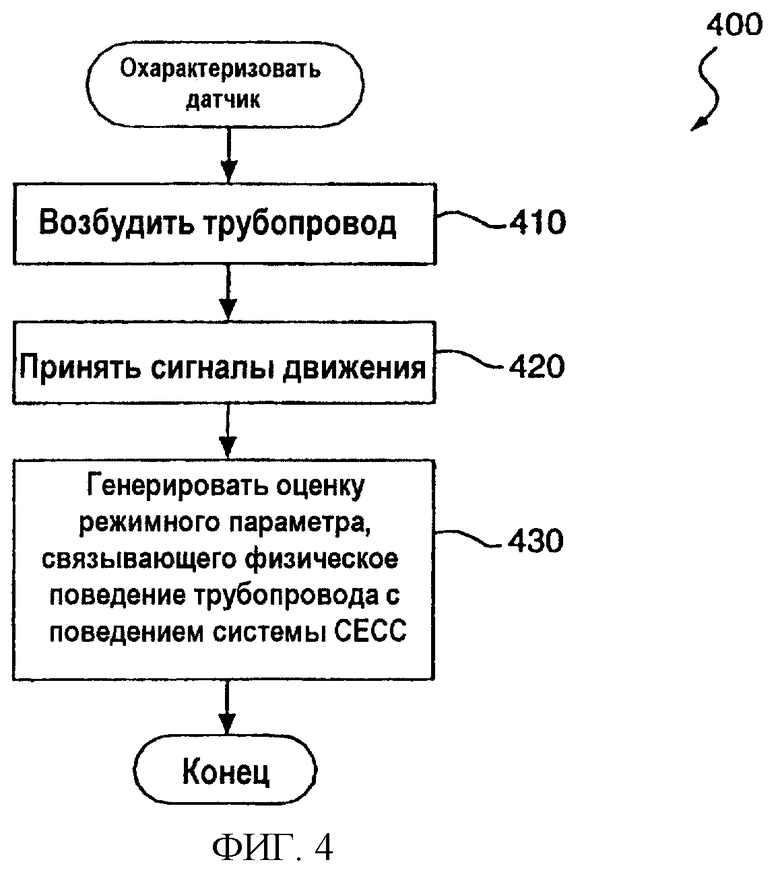
Фиг.4 иллюстрирует действия 400 для характеристики датчика параметра согласно аспекту настоящего изобретения. Трубопровод, такой как трубопроводы 103А, 103В на фиг.1, возбуждается (блок 410). К примеру, периодическое возбуждение может прикладываться к трубопроводу(ам) одним или более исполнительными механизмами, такими как исполнительный механизм 104 на фиг.1. Сигналы движения, представляющие физическую характеристику возбуждения, принимаются (блок 420). Оценка параметра мод колебаний, например, параметра фильтра мод или параметра проекций сил, генерируется из принятых сигналов движения (блок 430). Например, параметр фильтра мод может оцениваться с помощью одного из методов MRMV или AMF, подробно раскрытых выше, и силовой проектор может быть определен из оценки параметров фильтра мод.
Оценка модифицированных обращенных векторов мод колебаний
Согласно аспекту настоящего изобретения метод оценки модифицированных обращенных векторов мод колебаний (MRMV) использует функцию частотных характеристик (ФЧХ) датчика параметров вибрирующего трубопровода для генерирования оценки параметра фильтра мод. Этот метод может применяться на месте, например, как часть процесса инициализации датчика параметров. Метод MRMV может также использоваться, к примеру, для периодического обновления оценки параметра фильтра мод во время действия датчика параметров в системе технологической обработки вещества, такой как химическая технологическая установка.
Согласно методу MRMV трубопровод с датчиком возбуждается и соответствующие частотные характеристики измеряются для множества местоположений на трубопроводе по диапазону частот. Могут использоваться разнообразные методы измерений частотных характеристик, такие как когерентные измерения с синусоидальной разверткой или широкополосные измерения, использующие методы быстрого преобразования Фурье (БПФ) (FFT). Измерения частотных характеристик используются для генерирования матрицы ФЧХ, включающей в себя множество значений частотных характеристик для желательных частот для множества местоположений на трубопроводе. Для каждой представляющей интерес моды колебаний в трубопроводной конструкции идентифицируется полюс, и для каждого идентифицированного полюса определяется вектор с единственной степенью свободы (СЕСС). Обратная матрица ФЧХ перемножается с вектором СЕСС, связанным с представляющей интерес модой колебаний, для генерирования обращенного вектора моды. Эти обращенные векторы мод для множества представляющих интерес мод колебаний могут комбинироваться для составления фильтра мод, который при применении к сигналам движения, представляющим движение трубопровода в физической области, выдает оценку соответствующего движения в области мод, в том числе и для представляющих интерес мод колебаний.
Общая информация, касающаяся методов MRMV для структурного анализа, описана на стр. 70-87 диссертации Stuart J.Shelley, озаглавленной "Исследование дискретных фильтров мод для приложений структурной динамики", представленной в отдел дипломных изучений и исследований университета Цинциннати, 1991.
Для иллюстрации, собственные векторы для кориолисова массового расходомера с двойным U-образным трубопроводом модели CMF300 (изготавливаемого Micro Motion, Inc. из Boulder, Colorado) оценивались с помощью конечно-элементного анализа. Методы конечно-элементного моделирования общеизвестны для специалистов и не образуют части настоящего изобретения. Примерная конечно-элементная модель строилась с помощью SDRC I-DEAS и анализировалась посредством MSC/NASTRAN, конечно-элементный код доступен от MacNeal-Schwendler. Специалисты в конечно-элементном моделировании понимают, что альтернативно можно использовать и другие инструменты и методы конечно-элементного моделирования. Для большей информации о конечно-элементном моделировании кориолисовых расходомеров см. "A Finite Element for the Vibration Analysis of a Fluid-Conveying Timeshenko Beam" (AIAA paper 93-1552).
Идентифицированные собственные векторы для моделированного датчика CFM300 были затем редуцированы до трех желательных мод колебаний, включая моду возбуждения, крутильную моду и изгибную моду. Затем подсчитывались соответствующие значения естественной частоты ω и демпфирования ς для трех желательных мод колебаний:


Использовались три местоположения преобразователей, включая преобразователь, расположенный около центра U-образной трубопроводной конструкции, и левый и правый преобразователи, помещенные симметрично относительно центрального преобразователя.
Согласно методу MRMV матрица ФЧХ для конструкции предпочтительно оценивается на частотах вблизи резонансных пиков конструкции, т.к. отношения сигнала к шуму на этих частотах обычно выше, чем на нерезонансных частотах. Более предпочтительно значения частотных характеристик определяются на расчетных резонансных частотах и в точках половинной мощности для представляющих интерес мод колебаний, а также на максимальной частоте диапазона представляющих интерес частот. Для моделированного датчика CFM300 ФЧХ Н, оцененная как результирующее десяти частот (в том числе максимальной частоты 500 Гц), равна:
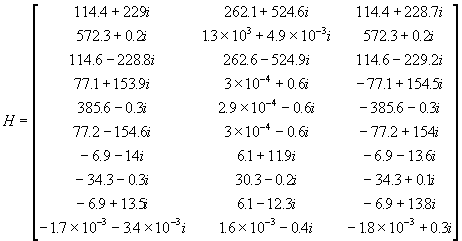
Как показано, матрица Н ФЧХ имеет действительную и мнимую части. Эти действительная и мнимая части образуют независимые наборы уравнений, а потому матрицу Н ФЧХ можно реорганизовать как матрицу 3×20, включающую в себя действительные значения, поставленные над мнимыми значениями.
В дополнение к нахождению матрицы ФЧХ метод MRMV включает в себя идентификацию полюса, например, нахождение частоты и демпфирования для каждой представляющей интерес моды колебаний. В датчике с автоматическим определением согласно настоящему изобретению полюс можно идентифицировать несколькими путями. Оценку полюса можно генерировать для типа датчика с помощью, например, конечно-элементной модели или агрегатной модели, генерируемой посредством экспериментального анализа совокупности датчиков. Альтернативно оценку полюса для конкретного датчика можно генерировать возбуждением этого датчика на конкретной частоте, измерением соответствующей частотной характеристики и применением одного из нескольких общеизвестных методов подгонки кривых для генерирования оценки полюса.
Согласно методу MRMV идентифицированный полюс λk используется для генерирования вектора СЕСС, представляющего k-ю представляющую интерес моду колебаний, оцененного на частотах, использованных в матрице ФЧХ:

где 
Зная матрицу Н ФЧХ и вектор СЕСС для представляющей интерес моды колебаний, можно определить обращенный вектор мод. В частности, матрица ФЧХ, вектор СЕСС и эквивалентный вектор режимов для k-й представляющей интерес моды колебаний связаны соотношением:
Н·Ψk=CECCk
или
где Н+ представляет собой обобщенную обратную матрицу матрицы Н ФЧХ.
Для описанного выше моделированного датчика CFM300 модифицированные обращенные векторы мод для изгибной (Ψb) и крутильной (Ψt) мод (используя полюса, идентифицированные конечно-элементным анализом) равны:

и
Как можно ожидать, выходные сигналы симметрично расположенных справа и слева преобразователей моделированного датчика CFM300 заданы равным весом в каждом из векторов, в то время как вектор изгибной моды колебаний дает больший вес для выходного сигнала центрального преобразователя, чем вектор крутильной моды. Модифицированные обращенные векторы мод колебаний могут комбинироваться для образования матрицы фильтра мод, которая аппроксимирует поведение описанной выше матрицы Ф собственных векторов.
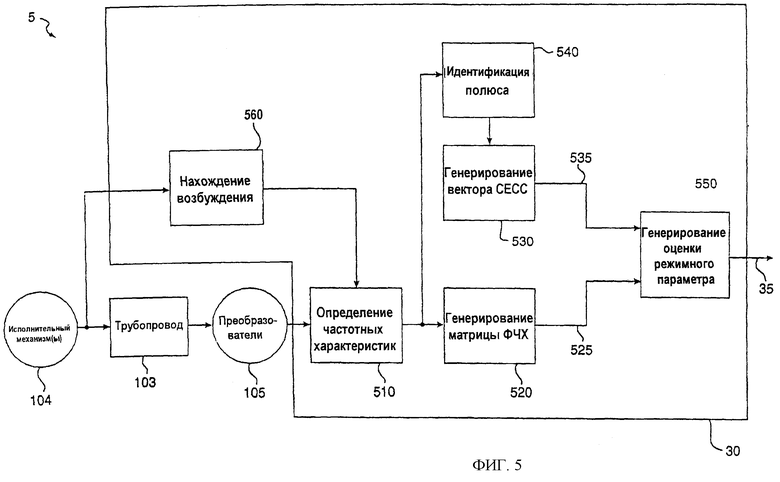
Фиг.5 иллюстрирует вариант выполнения датчика 5 с автоматическим определением параметров, который действует для использования метода MRMV, чтобы оценивать параметр мод колебаний датчика. Блок 30 оценки параметра мод колебаний включает в себя средство 510 определения частотной характеристики для генерирования множества частотных характеристик для множества местоположений трубопровода 103 по диапазону частот. Средство 560 определения возбуждения определяет возбуждение, приложенное к трубопроводу 103, обеспечивая средство 510 нахождения частотного отклика мерой возбуждения, приложенного к трубопроводу 103, так что можно получить измерения частотных характеристик для множества местоположений на трубопроводном узле. Специалисты поймут, однако, что уровень возбуждения можно определять несколькими путями. Например, уровень возбуждения можно принять либо можно вывести из команды возбуждения для исполнительного механизма 104, делая ненужным средство 560 нахождения возбуждения, представленное на фиг.5.
Средство 520 для генерирования матрицы 525 ФЧХ реагирует на средство 510 определения частотной характеристики, вырабатывающее матрицу 525 ФЧХ, которая включает в себя значения частотных характеристик на множестве частот (строки) во множестве местоположений (столбцы) на трубопроводе 103. Средство 530 генерирования вектора СЕСС генерирует вектор 535 СЕСС, представляющий информацию естественной частоты и демпфирования для полюса на трубопроводе 103, идентифицированного средством 540 идентификации полюса. Это средство 540 идентификации полюса может реагировать на средство 510 определения частотной характеристики, например, вырабатывающее оценку полюса на месте с помощью одного из множества общеизвестных методов идентификации полюса, как описано выше. Альтернативно средство 540 идентификации полюса может идентифицировать полюс трубопровода 103 с помощью автономного метода, такого как конечно-элементное моделирование, как описано выше. Средство 550 для генерирования оценки параметра фильтра мод реагирует на средство 520 генерирования матрицы ФЧХ и средство 530 генерирования вектора СЕСС, генерирующее оценку 35 параметра фильтра мод из матрицы 525 ФЧХ и вектора 535 СЕСС.
Специалисты поймут, что средство 560 определения возбуждения, средство 510 определения частотной характеристики, средство 540 идентификации полюса, средство 530 генерирования вектора СЕСС, средство 520 генерирования матрицы ФЧХ и средство 550 генерирования оценки параметра мод колебаний, представленные на фиг.5, могут быть воплощены, к примеру, в компьютере или ином устройстве обработки данных, таком как компьютер 50, представленный на фиг.2. Понятно, что средства, проиллюстрированные на фиг.5, можно воплотить с помощью аппаратного обеспечения специального назначения, встроенного программного обеспечения или программного обеспечения, выполняемого на специальном или универсальном вычислительном аппаратном обеспечении, либо их комбинации.
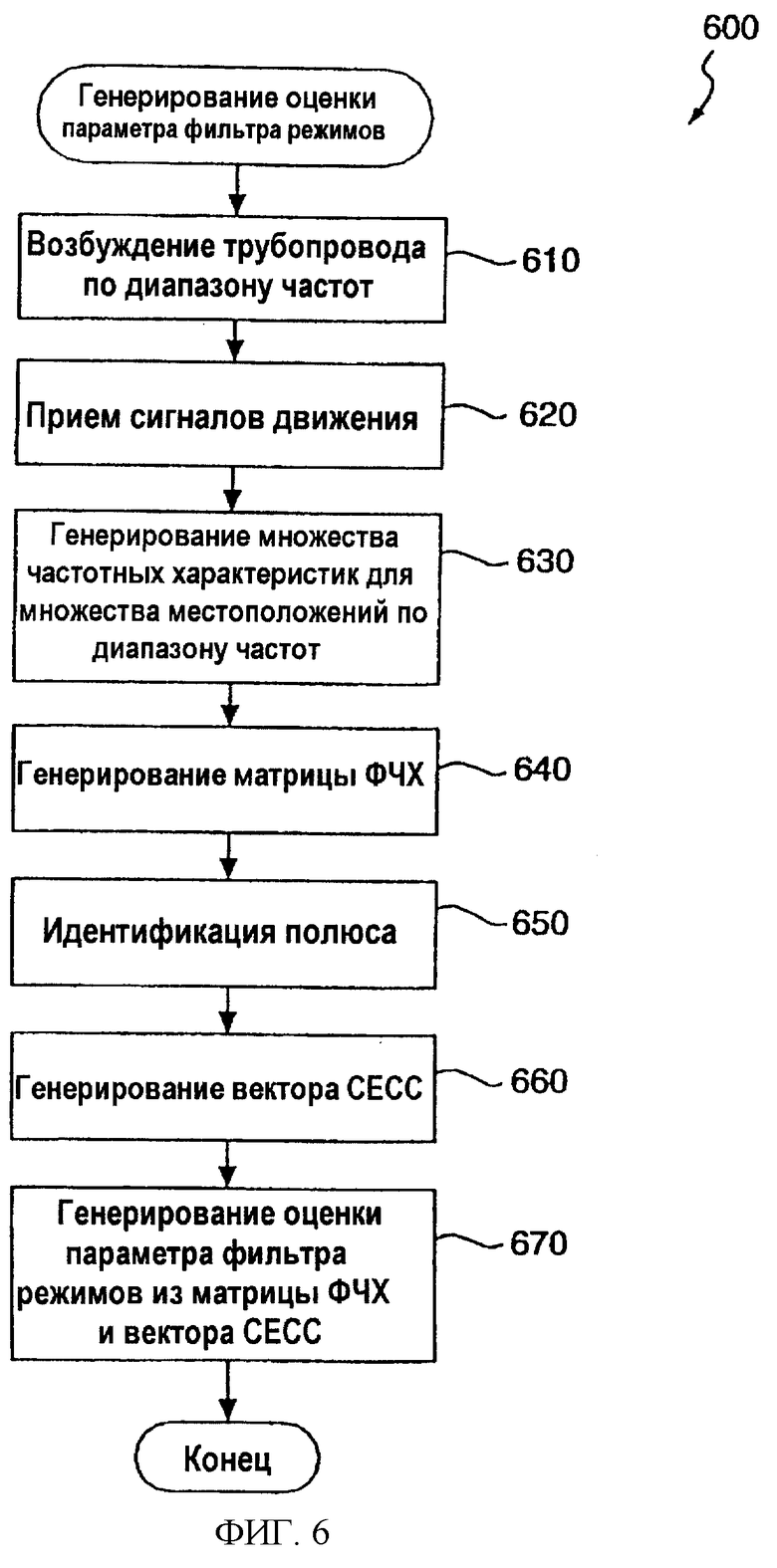
Фиг.6 иллюстрирует действия 600 для оценки параметра фильтра мод с помощью метода MRMV согласно настоящему изобретению. Трубопровод возбуждается по диапазону частот (блок 610). Принимаются сигналы движения, представляющие физическую характеристику на это возбуждение во множестве местоположений на трубопроводе (блок 620). Множество частотных характеристик определяется для множества местоположений по диапазону частот из принятого множества сигналов движения (блок 630). Матрица ФЧХ генерируется затем из множества частотных характеристик (блок 640). Идентифицируется полюс трубопровода (блок 650), и из него генерируется вектор СЕСС (блок 660). Оценка параметра фильтра мод генерируется из матрицы ФЧХ и вектора СЕСС (блок 670).
Специалисты поймут, что описанные выше измерения частотных характеристик можно выполнять несколькими путями. Например, может выполняться синусоидальная развертка, в которой трубопровод возбуждается последовательно рядом практически когерентных периодических возбуждений, при этом на каждой частоте возбуждения выполняются измерения частотных характеристик. Альтернативно трубопровод может возбуждаться широкополосным возбуждением, имеющим множество периодических компонентов с частотами в диапазоне частот, при этом измерения частотных характеристик выполняются по диапазону частот с помощью таких методов, как методы быстрого преобразования Фурье (БПФ). Специалисты поймут, что процесс идентификации полюса (блок 650) может происходить автономно, предшествуя процессу измерения частотной характеристики (блок 630), или же может выполняться в ответ на процесс измерения частотной характеристики, как описано выше.
Адаптивная фильтрация мод
Согласно аспекту адаптивного фильтра мод по настоящему изобретению последовательные оценки параметра фильтра мод итеративно генерируются, когда датчик параметров работает на месте.
Формируется начальная оценка Ψk вектора фильтра мод (т.е. начальная оценка коэффициентов фильтра мод). Эта начальная оценка может быть вектором из нулей или иных значений, которые предпочтительно не очень далеки от желательного результата, чтобы привести к проблемам со сходимостью. Этот начальный вектор фильтра мод прикладывается к действительным значениям xk движения, выделенным из сигналов движения, принятых от преобразователей на трубопроводном узле, вырабатывая начальную оценку ηk характеристики мод для датчика. Ошибка может быть определена как разность между расчетной характеристикой  мод и "реальной" характеристикой ηk мод для момента времени k:
мод и "реальной" характеристикой ηk мод для момента времени k:

Ошибка ek может быть использована для модификации фильтра мод, чтобы сделать расчетную характеристику ηk мод согласованной с реальной характеристикой ηk мод. Однако реальная характеристика ηk мод в общем случае неизвестна, так что используется эталонная система мод колебаний, имеющая эталонную характеристику η

где η
Уравнение (4) можно преобразовать в дискретный вид, пригодный для воплощения в цифровом компьютере:
где f представляет собой возбуждение, приложенное к трубопроводу, например, сила или какая-то мера силы, такая как ток возбудителя. Уравнение (5) можно применить для ряда временных шагов для минимизации ошибки ek путем последовательного генерирования модифицированных оценок  вектора фильтра мод. Решение можно получить с помощью метода наименьшего среднеквадратичного (НСК) (LMS). Можно использовать различные методы ИСК, такие как нормированные методы НСК, или другие адаптивные методы, такие как решетчатые фильтры, калмановские фильтры или адаптивные способы наименьших квадратов.
вектора фильтра мод. Решение можно получить с помощью метода наименьшего среднеквадратичного (НСК) (LMS). Можно использовать различные методы ИСК, такие как нормированные методы НСК, или другие адаптивные методы, такие как решетчатые фильтры, калмановские фильтры или адаптивные способы наименьших квадратов.
Согласно примерному методу минимизируется квадрат ошибки е градиента ошибки е
градиента ошибки е регулируется так, чтобы понижение градиента
регулируется так, чтобы понижение градиента  принималось для снижения ошибки e
принималось для снижения ошибки e градиента задается уравнением:
градиента задается уравнением:

На каждой итерации  регулируется путем вычитания малой доли градиента:
регулируется путем вычитания малой доли градиента:

где μ является адаптивным усилением, которое в общем случае определяет скорость и устойчивость сходимости.
Для многовходового случая характеристику мод можно рассматривать как возникающую от множества входных сил. Эффект каждой из этих входных сил может быть описан неизвестным вектором в общем случае комплексных коэффициентов {1} присвоения силы. Эталонная модель для такого случая задается уравнением:

где {fk} является вектором приложенных сил. Эталонная система возбуждается модовой силой, включающей в себя сумму входных сил {fk}, взвешенных коэффициентами {1} присвоения сил. Соответствующая эталонная модовая координата может генерироваться путем возбуждения Ni эталонных моделей
посредством Ni невзвешенных сил и с помощью вектора {1} присвоения силы для формирования взвешенного среднего значения для Ni эталонных модовых координат:
"Общая" скалярная характеристика координаты η
Ошибка многовходового фильтра мод задается затем уравнением:

В этом виде решение задачи выдает как вектор {Ψ} фильтра мод, так и вектор {1} присвоения сил или участников моды. Тривиальное решение, которое следует исключить, является решением с нулевой ошибкой, в котором как вектор {Ψ} фильтра мод, так и вектор {Ψ} присвоения сил равны нулю. Этого можно достичь нормализацией одного из коэффициентов к заранее заданной величине, такой как единица. К примеру, если l1 нормализуется к единице, уравнение (11) приобретает вид:
Данный подход имеет потенциальный недостаток в том, что, если коэффициент l1 близок к нулю, будут заданы неверные условия и можно получить неточный результат. Альтернативное решение включает в себя наложение ограничения на норму на векторе решения, когда, к примеру, норма вектора решения ограничивается единицей. Этот подход позволяет избегать проблемы с заданием неверных условий, но может быть более чувствительным к шумам в измеренных данных.
Фиг.7 иллюстрирует вариант выполнения датчика 5 параметров, который использует метод адаптивной фильтрации мод согласно настоящему изобретению. Возбуждение прикладывается к трубопроводу 103 одним или более исполнительными механизмами 104, а преобразователи 105 в ответ на это вырабатывают сигналы движения. Блок 30 оценки параметра мод колебаний включает в себя средство 710 определения возбуждения для определения возбуждения, приложенного к трубопроводу 103. Найденное возбуждение прикладывается к средству 720 для генерирования эталонной характеристики мод 725, т.е. характеристики эталонной системы мод колебаний. Средство 730 для генерирования оценки характеристики мод датчика, например, расчетный фильтр мод, реагирует на преобразователь 104, вырабатывая расчетную характеристику 735 мод колебаний согласно поданной на него оценке 745 параметра фильтра мод. Средство 750 обеспечивает определение ошибки 755 расчетной характеристики 735 мод колебаний по отношению к эталонной характеристике 725 мод колебаний. Средство 740 обеспечивает генерирование оценки 745 параметра фильтра мод в соответствии с ошибкой 755.
Специалистам будет понятно, что средство 710 определения возбуждения, средство 720 генерирования эталонной характеристики мод колебаний, средство 730 генерирования оценки характеристики мод, средство 750 определения ошибки и средство 740 генерирования оценки параметра фильтра мод, проиллюстрированные на фиг.7, могут быть воплощены, к примеру, в компьютере или ином устройстве обработки данных, таком как компьютер 50, представленный на фиг.2. Понятно, что в общем случае средства, представленные на фиг.7, могут быть воплощены с помощью аппаратного обеспечения специального назначения, встроенного программного обеспечения или программного обеспечения, выполняемого на специальных или универсальных устройствах обработки данных, либо их комбинации.
Фиг.8 иллюстрирует действия 800, использующие адаптивную фильтрацию мод, для генерирования оценки параметра фильтра мод. Определяется возбуждение, приложенное к трубопроводу с датчиком (блок 810), и это найденное возбуждение прикладывается к эталонной системе мод колебаний для генерирования эталонной характеристики мод колебаний (блок 820). Фильтр мод применяется к сигналам движения, представляющим отклик трубопровода с датчиком на приложенное возбуждение, чтобы генерировать оценку характеристики мод согласно оценке параметра фильтра мод (блок 830). Новая оценка параметра фильтра мод генерируется на основании ошибки оценки характеристики мод по отношению к эталонной характеристике мод колебаний (блок 840). Если эта ошибка не отвечает заданному критерию (блок 850), например, если эта ошибка или какая-то ее форма больше, чем заданное пороговое значение, действия блоков 810-840 повторяются до тех пор, пока критерий не будет удовлетворяться.
Фиг.9 иллюстрирует другой аспект настоящего изобретения, в частности, действия 900 для генерирования оценки параметра фильтра мод, в которых дискретные вычислительные циклы выполняются вдоль строк вышеприведенного уравнения (5). Генерируется начальная оценка параметра фильтра мод (блок 905). Определяется возбуждение, поданное на трубопровод с датчиком в момент времени k (блок 910), и из него генерируется значение η оценки характеристики мод (блок 930). Затем определяется ошибка оценки характеристики мод колебаний по отношению к эталонным характеристикам мод (блок 935), и на основании этой ошибки генерируется новая оценка параметра мод колебаний (блок 940) с помощью, например, вышеприведенного уравнения (7). Если эта ошибка не отвечает заранее заданному критерию, например, если имеет величину больше, чем заданное пороговое значение, процесс оценки повторяется (блоки 945-950 и блоки 910-940) до тех пор, пока заданный критерий не будет удовлетворяться.
оценки характеристики мод (блок 930). Затем определяется ошибка оценки характеристики мод колебаний по отношению к эталонным характеристикам мод (блок 935), и на основании этой ошибки генерируется новая оценка параметра мод колебаний (блок 940) с помощью, например, вышеприведенного уравнения (7). Если эта ошибка не отвечает заранее заданному критерию, например, если имеет величину больше, чем заданное пороговое значение, процесс оценки повторяется (блоки 945-950 и блоки 910-940) до тех пор, пока заданный критерий не будет удовлетворяться.
Понятно, что блоки или комбинации блоков в иллюстрациях блок-схем алгоритмов на фиг.4, 6 и 8-9 могут быть воплощены с помощью считываемого компьютером программного кода, например, программных команд и/или данных, обрабатываемых в компьютере или процессоре данных, таком как компьютер 50, представленный на фиг.2. Как это используется здесь, считываемый компьютером программный код может включать в себя - но не ограничивается ими - такие предметы, как команды операционной системы (например, объектный код), команды на языке высокого уровня и т.п., а также данные, которые могут быть считаны, к которым можно обращаться или которые можно использовать иным образом совместно с такими программными командами.
Программный код может загружаться в компьютер или аналогичное устройство обработки данных, включающее в себя - но не ограничивается ими - микропроцессор, микроконтроллер, процессор цифровых сигналов (ПЦС) или тому подобное. Комбинация программного кода и компьютера может обеспечить устройство, которое действует для воплощения функции или функций, конкретизированных в блоке или блоках иллюстраций блок-схем алгоритмов. Аналогично программный код может загружаться в компьютер или устройство обработки данных так, что этот программный код и компьютер обеспечат средство для выполнения функции или функций, конкретизированных в блоке или блоках блок-схем алгоритмов.
Программный код может также храниться в машиносчитываемом носителе данных, таком как магнитный диск или лента, память на цилиндрических магнитных доменах, программируемое устройство памяти, такое как электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), или тому подобное. Запомненный программный код может направлять компьютер, запрашивающий этот носитель данных, работать так, чтобы программный код, хранящийся в носителе данных, формировал промышленное изделие, включающее в себя средство программного кода для воплощения функции или функций, конкретизированных в блоке или блоках блок-схем алгоритмов. Программный код может также загружаться в компьютер, чтобы вызвать ряд подлежащих выполнению операционных шагов, тем самым воплощая такой способ, что программный код вместе с компьютером обеспечивает шаги для воплощения функций, конкретизированных в блоке или блоках блок-схем алгоритмов. Соответственно, блоки иллюстраций блок-схем алгоритмов поддерживают устройство, действующее для выполнения конкретизированных функций, комбинации средств для выполнения конкретизированных функций, комбинации шагов, которые выполняют конкретизированные функции, и машиносчитываемое средство программного кода, воплощенное в машиносчитываемом носителе данных, для выполнения конкретизированных функций.
Понятно также, что в общем случае каждый блок иллюстраций блок-схем алгоритмов и комбинации блоков в иллюстрациях блок-схем алгоритмов могут быть воплощены с помощью аппаратного обеспечения специального назначения, встроенного программного обеспечения или программного обеспечения, выполняемого на специальных или универсальных устройствах обработки данных, либо их комбинации. Например, функции блоков в иллюстрациях блок-схем алгоритмов могут воплощаться специализированной интегральной схемой (ASIC), программируемой логической матрицей или аналогичным устройством специального назначения, либо программными командами и данными, загруженными и выполняемыми в микропроцессоре, микроконтроллере, ПЦС или ином вычислительном устройстве специального назначения.
Как описано здесь, датчик параметров вибрирующего трубопровода, например, кориолисов расходомер, плотномер с вибрационной трубкой или тому подобное, включает в себя блок оценки параметра мод колебаний, который действует для оценки параметра мод колебаний этого датчика в ответ на сигналы движения, вырабатываемые преобразователями датчика. Параметр мод колебаний может оцениваться несколькими методами. Например, параметр фильтра мод может оцениваться посредством метода оценки модифицированных обращенных векторов мод (MRMV) или методом адаптивной фильтрации мод. Оценка параметра фильтра мод может использоваться для генерирования параметра проекций сил для выборочного выполнения одной или более мод датчика параметров. Эти методы могут модифицироваться дополнительно в объеме настоящего изобретения. Например, можно получить улучшенные измерения за счет использования оценки параметров фильтра мод и проекций сил для преимущественного возбуждения моды датчика параметров, такой что можно получить более точные оценки для этой моды, к примеру, оценки полюса, оценки частотных характеристик и т.п., и, в свою очередь, использованы для генерирования даже более точных оценок параметра мод колебаний.
Чертежи и описание настоящего изобретения раскрывают варианты выполнения этого изобретения. Хотя применяются конкретные выражения, они используются лишь в родовом и описательном смысле, но не для ограничения. Ожидается, что специалист сможет сделать, использовать и продавать альтернативные варианты выполнения, которые находятся в объеме нижеследующей формулы изобретения либо буквально, либо по доктрине эквивалентов.
Изобретения относятся к основанным на эффекте Кориолиса датчикам параметров процесса (массовый расход, плотность) в системе технологической обработки вещества и способам их работы. Датчик содержит по меньшей мере один трубопровод, вмещающий вещество из системы его технологической обработки, и преобразователи во множестве местоположений на трубопроводе для выработки множества сигналов движения. В состав датчика также входят блок оценки параметра мод колебаний, выполненный с возможностью приема множества сигналов движения, и блок оценки параметра процесса, выполненный с возможностью приема множества сигналов движения, приема оценки параметра мод колебаний и оценки параметра процесса для вещества из принятого множества сигналов движения согласно оценке параметра мод колебаний. Оценка параметра мод колебаний связывает поведение трубопровода(ов) с поведением системы с единственной степенью свободы и включает оценку параметра фильтра мод. Изобретения обеспечивают повышение точности измерений благодаря возможности получения характеристики поведения датчика по месту (in situ). 2 с. и 25 з.п. ф-лы, 9 ил.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Способ монтажа теплоизоляционной оболочки на наружной поверхности вертикальных трубопроводов | 1977 |
|
SU702212A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ МЕХАНИЧЕСКОГО НУЛЯ КОРИОЛИСОВОГО ИЗМЕРИТЕЛЯ И КОРИОЛИСОВ ИЗМЕРИТЕЛЬ ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОГО РАСХОДА ПРОТЕКАЮЩЕЙ ЧЕРЕЗ НЕГО ТЕКУЧЕЙ СРЕДЫ | 1992 |
|
RU2119149C1 |

