Область техники, к которой относится изобретение
Данное изобретение относится к процессору сигналов для устройства, которое измеряет характеристики материала, протекающего, по меньшей мере, через одну вибрирующую трубку в устройстве. В частности, данное изобретение касается процессора цифровых сигналов для выполнения расчетов с целью определения частот сигналов, принимаемых от тензометрических датчиков, которые измеряют частоту колебаний трубки.
Уровень техники
Известно использование массовых расходомеров на основе эффекта Кориолиса для измерения массового расхода и получения другой информации о материалах, протекающих через трубку в расходомере. Примеры расходомеров на основе эффекта Кориолиса раскрыты в патентах США №4109524 от 29 августа 1978, №4491025 от 01 января 1985 и Re31,450 от 11 февраля 1982, все выданные J.E.Smith и др. Эти расходомеры имеют одну или несколько трубок с прямой или искривленной конфигурацией. Каждая конфигурация трубок в массовом расходомере на основе эффекта Кориолиса имеет несколько видов собственных колебаний, которые могут быть простыми изгибными, крутильными или связанными колебаниями. Каждую трубку возбуждают, чтобы получить в ней резонансные колебания одного из упомянутых видов собственных колебаний. Материальные потоки в расходомере от подсоединенного трубопровода на входной стороне расходомера направляются через трубку или трубки и выходят из расходомера с его выходной стороны. Виды собственных колебаний заполненной материалом, вибрирующей системы определяются, в частности, общей массой трубок и материала, протекающего в этих трубках.
Когда материал через расходомер не протекает, все точки вдоль трубки под воздействием приложенной силы возбуждения колеблются с одинаковой фазой либо с небольшим начальным фиксированным фазовым сдвигом, который можно скорректировать. При протекании материала через расходомер колебания в каждой точке трубки под воздействием сил Кориолиса будут иметь разную фазу. Фаза на входной стороне трубки будет отставать от возбудителя, в то время как фаза на выходной стороне трубки будет опережать возбудитель. Тензометрические датчики устанавливают на трубку(и) для получения синусоидальных сигналов, представляющих перемещение трубки(ок). Сигналы с выхода тензометрических датчиков обрабатывают с целью определения разности фаз между этими датчиками. Разность фаз между сигналами двух тензометрических датчиков пропорциональна удельному массовому расходу материала через трубку(и).
Расходомеры на основе эффекта Кориолиса имеют преобразователь, который создает сигнал возбуждения для приведения в действие возбудителя и определяет удельный массовый расход и другие характеристики материала по сигналам, принимаемым от тензометрических датчиков. Известный преобразователь выполняют на основе аналоговых схем, которые предназначены для создания сигнала возбуждения и обнаружения сигналов от тензодатчиков. Аналоговые преобразователи оптимизировались на протяжении ряда лет и стали относительно дешевыми в производстве. Следовательно, желательно спроектировать расходомеры на основе эффекта Кориолиса, в которых можно использовать известные преобразователи.
Проблема состоит в том, что известные преобразователи должны работать с сигналами, имеющими узкий диапазон рабочих частот. Этот диапазон рабочих частот обычно составляет от 20 до 200 Гц. Это ограничивает разработчиков, вынуждая их не выходить за рамки указанного узкого диапазона рабочих частот. Кроме того, узкий диапазон рабочих частот делает невозможным использование известного преобразователя с расходомерами ряда типов, такими как расходомер с прямой трубкой, рабочий диапазон частот которого лежит выше и составляет от 300 до 800 Гц. Расходомеры с прямой трубкой, работающие в диапазоне 300-800 Гц, менее чувствительны к эффектам Кориолиса, используемым для измерения удельного массового расхода. Следовательно, для вычисления удельного массового расхода потребуются более точные измерения разности фаз между датчиками.
Для того чтобы использовать один и тот же тип преобразователя в нескольких различных конструкциях расходомеров на основе эффекта Кориолиса, работающих на нескольких отличающихся друг от друга частотах, изготовители расходомеров на основе эффекта Кориолиса установили, что для создания сигналов возбуждения и обработки сигналов, принимаемых от тензодатчиков, желательно использовать процессор цифровых сигналов. Процессор цифровых сигналов предпочтителен потому, что благодаря оцифровке сигналов от тензодатчиков при приеме этих сигналов преобразователем можно снизить требования к разрешающей способности и точности измерений, которые предъявляются к аналоговым электронным компонентам расходомеров, работающих на более высоких частотах. Кроме того, команды для операций обработки сигналов, выполняемых процессорами цифровых сигналов, можно модифицировать, чтобы обеспечить работу на нескольких отличных друг от друга частотах.
Однако процессоры цифровых сигналов имеют ряд недостатков по сравнению с известными преобразователями на аналоговых схемах. Первая проблема, связанная с процессором цифровых сигналов, состоит в том, что цифровые процессоры дороже в производстве, поскольку их схемы сложнее. Во-вторых, для процессоров цифровых сигналов требуется монтажная плата с большей площадью поверхности, что может вызвать проблемы, когда в конструкции расходомера мало свободного пространства. В-третьих, для приведения в действие процессоров цифровых сигналов требуется большая мощность, чем для аналоговых схем. Энергопотребление вырастает в особую проблему, когда процессор должен работать с максимальной тактовой частотой, для того чтобы обеспечить все вычисления, необходимые для обработки сигналов, и выполнить измерения характеристик материала, к примеру, массового расхода. По всем этим причинам в данной области техники существует потребность в процессоре цифровых сигналов, способном работать с расходомерами разных конструкций, быть недорогим в производстве и потреблять пониженную мощность, необходимую для выполнения требуемых вычислений.
В патенте США №5555190 раскрыты устройство и способ для определения частотных и фазовых соотношений в вибрирующих расходомерных трубках в массовом расходомере на основе эффекта Кориолиса. Для точного определения частотных и фазовых соотношений в вибрирующей расходомерной трубке, а значит, для более точного определения удельного массового расхода материала, протекающего через массовый расходомер, в устройстве обработки цифровых сигналов используют способы и устройство адаптивного выделения сигнала из шумов в линии. С каждым сигналом от датчиков, расположенных на вибрирующих расходомерных трубках, связаны прореживающие фильтры для защиты от наложения спектров. Эти фильтры уменьшают количество выборок, поступающих от аналого-цифрового устройства дискретизации с фиксированной частотой, связанного с сигналом каждого датчика.
В патенте США №5734112 раскрыт способ для определения давления в работающем массовом расходомере на основе эффекта Кориолиса. В расходомерных трубках расходомера на основе эффекта Кориолиса возбуждаются как изгибные, так и крутильные колебания. Отношение основных частот, на которых колеблются расходомерные трубки при каждом из указанных двух видов колебаний, пропорционально давлению в расходомерных трубках. В предпочтительном варианте согласно методу сумм/разностей сначала выделяют наложенные синусоиды, представляющие основные частоты указанных двух видов колебаний. Затем для быстрой оценки основных частот в каждом из двух видов колебаний используют быстродействующие сопряженные цифровые фильтры излучателя. После этого полученные оценки частот используются цепями фильтрации, включающими цифровые узкополосные режекторные и полосовые фильтры, а также для реализации рекурсивных методов цифровой фильтрации по критерию максимального правдоподобия с целью уточнения оценок основных частот изгибных и крутильных колебаний. Улучшенные оценки частот изгибных и крутильных колебаний используют для определения давления в расходомерных трубках в функции соотношения двух частот, а также для центрирования цепочек узкополосных режекторных и полосовых фильтров, используемых для уточнения частоты изгибных колебаний в каналах двух датчиков колебаний для вычислений удельного массового расхода. Затем определенное таким путем давление можно использовать для коррекции вычислений удельного массового расхода, либо для других целей измерения давления самого по себе.
Сущность изобретения
Решение вышеуказанных и других проблем и прогресс в данной области техники обеспечивается созданием многочастотного процессора цифровых сигналов согласно настоящему изобретению. Настоящее изобретение включает процессы обработки, которые запоминаются в памяти и выполняются процессором для того, чтобы обрабатывать сигналы, принимаемые от тензодатчиков, установленных на вибрирующей трубке. Процессы обработки, предложенные в данном изобретении, дают множество преимуществ, позволяющих использовать процессор цифровых сигналов одного и того же типа для множества типов расходомеров, действующих на основе эффекта Кориолиса.
Первое преимущество процессов обработки согласно настоящему изобретению состоит в том, что эти процессы не теряют своей точности, несмотря на использование конечных арифметических операций вместо арифметических операций с плавающей точкой. Второе преимущество процессов обработки согласно настоящему изобретению состоит в том, что эти процессы могут быть реализованы на любых недорогих процессорах цифровых сигналов с низким энергопотреблением, таких как Texas Instruments TM3205xx, Analog Devices ADSP21xx или Motorola 5306x. Размер команд для этих процессов обработки согласно настоящему изобретению достаточно мал, что позволяет разместить их во внутренней памяти процессора цифровых сигналов, а значит, исключает необходимость иметь внешнюю память с быстрым доступом, увеличивающую стоимость, энергопотребление и монтажное пространство для преобразователя. Эти процессы обработки содержат небольшое число вычислительных структур, что облегчает их перенос с одного недорогого процессора на другой.
Третьим преимуществом является то, что эти процессы обработки предъявляют минимальные требования к вычислительным ресурсам. Пониженные требования к вычислительным ресурсам позволяют процессору цифровых сигналов работать с тактовой частотой ниже его максимальной тактовой частоты, что уменьшает энергопотребление процессора.
Преобразователь, реализующий процессы обработки согласно настоящему изобретению, имеет следующие электронные компоненты. Аналоговые сигналы от тензочувствительных измерительных преобразователей, прикрепленных к датчикам, принимаются аналого-цифровым преобразователем (АЦП). Преобразованные цифровые сигналы подаются в стандартный цифровой процессор. Цифровой процессор - это блок обработки, который выполняет считываемые машиной команды, хранящиеся в памяти, подсоединенной к процессору через шину. Стандартный цифровой процессор имеет постоянное запоминающее устройство (ПЗУ), в котором хранятся команды для выполнения требуемых процессов обработки, к примеру, процессов обработки согласно настоящему изобретению. Процессор также соединен с оперативным запоминающим устройством (ОЗУ), в котором хранятся команды для процесса обработки, выполняемого в данный момент, и данные, необходимые для выполнения этого процесса обработки. Процессор может также формировать сигналы возбуждения для расходомера, действующего на основе эффекта Кориолиса. Для того чтобы подать сигнал возбуждения в систему возбуждения, цифровой процессор может быть подсоединен к цифроаналоговому преобразователю (ЦАП), который получает цифровые сигналы от процессора и подает аналоговые сигналы в систему возбуждения.
Ниже описаны функции, реализуемые в процессах обработки по настоящему изобретению, для определения частот сигналов, принимаемых от тензодатчиков, а также разности фаз между этими сигналами. Во-первых, от тензодатчиков принимают выборки сигналов с первой частотой дискретизации. Частота дискретизации - это количество входных сигналов, принимаемых от тензодатчиков, которые используют для определения характеристик сигналов от тензочувствительных измерительных преобразователей. Первое прореживание выборок выполняют с первой частоты дискретизации до промежуточной частоты дискретизации. Прореживание - это просто преобразование одного количества выборок в меньшее количество выборок. Прореживание выполняют для увеличения разрешающей способности сигналов, дискретизированных для обеспечения более точного вычисления частоты для каждого сигнала. Затем выполняют демодуляцию выборок на промежуточной частоте дискретизации. Второе прореживание выборок выполняют до требуемой частоты дискретизации. Частоту колебаний трубок у первого тензодатчика и у второго тензодатчика определяют из выборок сигналов на требуемой частоте дискретизации.
Для того чтобы использовать одни и те же процессы обработки для разных расходомеров с разными частотами, можно также выполнить следующие шаги. Вычисляют оценку частоты колебаний расходомера. Затем эта оценка частоты используется для демодуляции сигналов от каждого тензочувствительного измерительного преобразователя на I составляющую и Q составляющую. Затем I составляющую и Q составляющую используют для преобразования сигналов к центральной частоте, если рабочая частота сигналов больше переходной частоты. После демодуляции сигналы можно проредить второй раз для вторичного повышения разрешающей способности сигналов.
Далее выделяют и точно измеряют преобладающую частоту сигналов. Затем выполняют вычисление для I составляющей и Q составляющей сигналов с целью преобразования в нулевую частоту. После этого каждая составляющая может быть опять прорежена для повышения точности измерения. Полоса частот каждого сигнала может быть сужена настолько, насколько это необходимо, с помощью соответствующей низкочастотной фильтрации. Затем выполняется операция комплексной корреляции, которая определяет разность фаз между сигналами.
Согласно настоящему изобретению одним аспектом изобретения является способ для обработки сигналов, принимаемых от первого тензодатчика и второго тензодатчика, которые измеряют вибрации трубки с использованием процессора цифровых сигналов, для выдачи информации о материале, протекающем через трубку, следующим образом. Процессор получает выборки сигналов от первого тензодатчика и второго тензодатчика на первой частоте дискретизации. Эти выборки прореживают с первой частоты дискретизации до требуемой частоты дискретизации. Частоту вибрации трубки у первого тензодатчика и у второго тензодатчика определяют из выборок сигнала на требуемой частоте дискретизации.
Другим аспектом данного изобретения является демодуляции сигналов от первого тензодатчика и второго тензодатчика для приведения этих сигналов к центральной частоте.
Еще одним аспектом данного изобретения является вычисление нормализованной частоты сигналов.
Следующим аспектом данного изобретения является то, что демодуляцию выполняют следующим образом. Вычисляют нормализованную пульсацию нормализованной частоты сигналов. Для приведения сигналов к центральной частоте вычисляют скалярные произведения нормализованной пульсации и сигналов от первого тензодатчика и второго тензодатчика.
Другим аспектом данного изобретения является то, что вычисление нормализованной частоты выполняют следующим образом. Сигналы демультиплексируют на синфазные составляющие и квадратурные составляющие. Затем интегрируют синфазные составляющие и интегрируют квадратурные составляющие. Для получения цифровых интегрированных сигналов синфазные составляющие и квадратурные составляющие мультиплексируют. Для получения нормализованной частоты сигналов вычисляют отношение амплитуды сигналов к амплитуде цифровых интегрированных сигналов.
Еще одним аспектом данного изобретения является то, что вычисление нормализованной частоты сигналов выполняют путем подачи интегрированных квадратурных составляющих в компенсатор, реагирующий на шаг интегрирования, причем до шага мультиплексирования.
Следующим аспектом данного изобретения является то, что вычисление нормализованной частоты выполняют путем подачи интегрированных синфазных составляющих в компенсатор, реагирующий на шаг интегрирования, причем до шага мультиплексирования.
Другим аспектом данного изобретения является то, что определение частоты вибрации трубки выполняют следующим образом. Определяют нормализованную частоту сигналов. Затем нормализованную частоту сигналов модулируют. Для определения частоты вибрации трубки выполняют комплексную демодуляцию сигналов с использованием модулированной нормализованной частоты.
Еще одним аспектом данного изобретения является то, что определение частоты вибрации трубки выполняют следующим образом. Прореживают демодулированные сигналы. Для определения разности фаз между сигналами выполняют операцию комплексной корреляции сигналов.
Следующим аспектом данного изобретения является определение разности фаз между сигналами от первого тензодатчика и сигналами от второго тензодатчика.
Другим аспектом данного изобретения является определение характеристик материала, протекающего через трубку в соответствии с результатами определения частоты сигналов от первого тензодатчика и сигналов от второго тензодатчика.
Еще одним аспектом данного изобретения является то, что одной из характеристик является удельный массовый расход материала, протекающего через трубку.
Следующим аспектом данного изобретения является то, что одной из характеристик является плотность.
Другим аспектом данного изобретения является устройство, которое принимает сигналы от тензодатчиков, закрепленных на трубке, которая вибрирует под действием возбудителя, и измеряет характеристики материала, протекающего через трубку, на основе сигналов от тензодатчиков, где сигналы отражают перемещение трубки относительно, по меньшей мере, двух точек, причем устройство включает в себя аналого-цифровой преобразователь, преобразующий выборки сигналов в цифровые выборки сигналов; и
процессор, выполненный с возможностью выполнения первого прореживания цифровых выборок с первой частоты дискретизации до промежуточной частоты дискретизации;
устройство отличается тем, что процессор выполнен с возможностью демодуляции цифровых выборок на промежуточной частоте дискретизации;
выполнения второго прореживания цифровых выборок до требуемой частоты дискретизации и
определения частоты вибрации для трубки у первого тензодатчика и у второго тензодатчика на основе цифровых выборок сигналов на требуемой частоте дискретизации.
Еще одним аспектом данного изобретения является то, что процессор сконфигурирован для демодуляции цифровых выборок путем вычисления нормализованной частоты сигналов.
Следующим аспектом данного изобретения является то, что процессор дополнительно сконфигурирован для демодуляции путем вычисления нормализованной пульсации нормализованной частоты сигналов и вычисления скалярных произведений нормализованной пульсации и сигналов от первого тензодатчика и от второго тензодатчика для приведения сигналов к центральной частоте.
Другим аспектом данного изобретения является то, что процессор сконфигурирован для вычисления нормализованной частоты путем демультиплексирования сигналов на синфазную составляющую и квадратурную составляющую, интегрирования синфазной составляющей, интегрирования квадратурной составляющей, мультиплексирования синфазной составляющей и квадратурной составляющей для получения цифровых интегрированных сигналов и вычисления отношения амплитуды сигналов цифровых интегрированных сигналов с целью получения нормализованной частоты сигналов.
Еще одним аспектом данного изобретения является то, что процессор сконфигурирован для вычисления нормализованной частоты путем подачи интегрированной квадратурной составляющей в компенсатор, реагирующий на шаг интегрирования квадратурной составляющей, причем до мультиплексирования квадратурной составляющей.
Следующим аспектом данного изобретения является то, что процессор сконфигурирован для вычисления нормализованной частоты путем подачи интегрированной синфазной составляющей в компенсатор, реагирующий на интегрирование синфазной составляющей, причем до мультиплексирования синфазной составляющей.
Другим аспектом данного изобретения является то, что процессор сконфигурирован для определения частоты вибрации трубки путем:
определения нормализованной частоты сигналов;
модулирования нормализованной частоты сигналов и
выполнения комплексной демодуляции сигналов с использованием модулированной нормализованной частоты для определения частоты вибрации трубки.
Еще одним аспектом данного изобретения является то, что процессор сконфигурирован для определения частоты вибрации трубки путем:
прореживания демодулированных сигналов и
выполнения операции комплексной корреляции сигналов для определения разности фаз между сигналами.
Следующим аспектом данного изобретения является то, что процессор дополнительно сконфигурирован для определения разности фаз между сигналами от первого тензодатчика и сигналами от второго тензодатчика.
Другим аспектом данного изобретения является то, что процессор дополнительно сконфигурирован для:
определения характеристик материала, протекающего через трубку, в соответствии с результатами определения частоты сигналов от первого тензодатчика и сигналов от второго тензодатчика.
Еще одним аспектом данного изобретения является то, что одной из характеристик является удельный массовый расход материала, протекающего через трубку.
Следующим аспектом данного изобретения является то, что одной из характеристик является плотность.
Другим аспектом данного изобретения является измерительный электронный блок для расходомера на основе эффекта Кориолиса.
Описание чертежей
Настоящее изобретение можно понять из последующего подробного описания и сопроводительных чертежей, на которых показаны:
фиг.1 - расходомер на основе эффекта Кориолиса, имеющий цифровой преобразователь, который реализует процессы обработки многочастотных сигналов тензодатчиков согласно данному изобретению;
фиг.2 - блок-схема преобразователя цифровых сигналов;
фиг.3 - блок-схема операций, выполняемых цифровым преобразователем;
фиг.4 - блок схема процесса для формирования данных из сигналов, принимаемых от тензодатчиков;
фиг.5 - блок схема процесса выполнения прореживания выборок сигнала от тензодатчика;
фиг.6 - блок схема процесса вычисления оценки частоты сигналов, принимаемых от датчиков;
фиг.7 - процесс выполнения селекции частоты на низкую и высокую для принимаемых сигналов;
фиг.8 - процесс демодуляции принимаемых сигналов и
фиг.9 - способ определения данных о вибрации расходомерной трубки на основе принимаемых сигналов.
Подробное описание изобретения
Расходомер на основе эффекта Кориолиса в целом - фиг.1.
На фиг.1 показан расходомер 5 на основе эффекта Кориолиса, который включает в себя измерительный узел 10 и преобразователь 20. Преобразователь 20 соединен с измерительным узлом 10 проводами 100 для выдачи по каналу 26 данных о плотности, удельном массовом расходе, удельном объемном расходе, температуре, суммарном массовом расходе и повышенной плотности по каналу 26. Здесь описывается конструкция расходомера на основе эффекта Кориолиса, хотя специалистам в данной области техники должно быть очевидно, что настоящее изобретение может быть практически воплощено с любым устройством, имеющим вибрирующую трубку для измерения характеристик материала. Вторым примером такого устройства является плотномер с вибрирующей трубкой, который не обладает дополнительными измерительными возможностями, обеспечиваемыми массовым расходомером на основе эффекта Кориолиса.
Измерительный узел 10 включает пару фланцев 101 и 101', коллектор 102 и трубки 103А и 103В. Возбудитель 104 и тензодатчики 105 и 105' соединены с трубками 103А-В. Затяжки 106 и 106' служат для задания осей W и W', относительно которых колеблется каждая трубка.
Когда расходомер 10 введен в трубопроводную систему (не показана), где происходит транспортировка технологического материала, характеристики которого подлежат измерению, материал поступает в измерительный узел 10 через фланец 101, проходит через коллектор 102, где направляется по трубкам 103А и 103В, протекает через трубки 103А и 103В и возвращается в коллектор 102, откуда он и покидает измерительный узел через фланец 101'.
Трубки 103А и 103В подбирают и крепят к коллектору 102 таким образом, чтобы получить одинаковые распределение массы, моменты инерции и модули упругости относительно осей W-W и W'-W' соответственно. Трубки выходят наружу из коллектора, оставаясь фактически параллельными друг другу.
Трубки 103А-103В приводятся в движение возбудителем 104 в противоположных направлениях относительно их соответствующих осей изгиба W и W', что определяется как первый вид колебаний - изгибные колебания не в фазе. Возбудитель 104 может иметь любую из множества известных конструкций, к примеру, электромагнит, закрепленный на трубке 103А, и смонтированную напротив него на трубке 103В катушку; причем для возбуждения вибраций обеих трубок через этот узел пропускают переменный ток. Соответствующий сигнал возбуждения на возбудитель 104 подается измерительным электронным блоком 20 через провод 110.
Преобразователь 20 принимает сигналы скорости слева и справа, которые появляются в проводах 111 и 111' соответственно. Преобразователь 20 создает в проводе 110 сигнал возбуждения, который заставляет возбудитель 104 создавать вибрацию трубок 103А и 103В. Преобразователь 20 обрабатывает сигналы скорости слева и справа, вычисляя удельный массовый расход и плотность материала, проходящего через измерительный узел 10. Эта информация подается в канал 26.
Специалистам в данной области техники известно, что расходомер 5 на основе эффекта Кориолиса имеет много общего по конструкции с плотномером с вибрирующей трубкой. В плотномерах с вибрирующей трубкой также используется вибрирующая трубка, через которую либо пропускают поток материала, либо материал в трубке задерживают, - в случае плотномеров, где измеряется плотность отобранной пробы. В плотномерах с вибрирующей трубкой также используют систему возбуждения для создания вибрации в трубке. В плотномерах с вибрирующей трубкой обычно используется только один сигнал обратной связи, поскольку при измерении плотности требуется измерять только частоту, а измерять фазу нет необходимости. Приведенное здесь описание настоящего изобретения равным образом применимо к плотномерам с вибрирующей трубкой.
Цифровой преобразователь 20 - фиг.2.
На фиг.2 показаны компоненты цифрового преобразователя 20. По каналам 111 и 111' передаются сигналы скорости слева и справа от расходомерного узла 10 в преобразователь 20. Сигналы скорости принимаются аналого-цифровым преобразователем (АЦП) 203 в измерительном электронном блоке 20. АЦП 203 преобразует сигналы скорости слева и справа в цифровые сигналы, используемые блоком обработки 201, и передает цифровые сигналы по каналу 210 - 210'. Хотя АЦП 203 показан в виде двух отдельных компонент, он может быть выполнен в виде одного преобразователя, к примеру, 16-разрядной микросхемы кодека АК 4516, в которой предусмотрено 2 преобразователя, так что сигналы от обоих датчиков преобразуются одновременно. Цифровые сигналы по каналам 210 - 210' поступают в процессор 201. Специалистам в данной области техники очевидно, что к процессору 201 может быть подсоединено любое количество тензочувствительных и других датчиков, к примеру, резистивный датчик температуры (РДТ) для определения температуры расходомерной трубки.
Сигналы возбудителя передаются по каналу 212, который подает эти сигналы в цифроаналоговый преобразователь (ЦАП) 202. ЦАП 202 является обычным цифроаналоговым преобразователем и может представлять собой отдельную микросхему ЦАП либо быть интегрирован в микросхему стерео кодека, такую как стандартная микросхема АКМ 4516. Другим известным ЦАП 202 является микросхема AD7943. Аналоговые сигналы из ЦАП 202 передаются в схему возбуждения 290 по каналу 291. Затем схема возбуждения 291 подает по каналу 110 сигнал возбуждения в возбудитель 104. По каналу 26 передаются сигналы в средства ввода и вывода (не показаны), которые позволяют преобразователю получать данные от оператора и посылать ему данные.
Блок обработки 201 представляет собой микропроцессор, процессор (или группу процессоров), который считывает команды из памяти и выполняет эти команды, реализуя различные функции расходомера. В предпочтительном варианте в качестве процессора 201 используют микропроцессор ADSP-2185L, выпускаемый Analog Devices. Реализуемые функции включают, но не ограничиваются этим, расчет удельного массового расхода материала, расчет удельного объемного расхода материала и расчет плотности материала, которые могут храниться в виде команд в постоянном запоминающем устройстве (ПЗУ) 220. Процессор 201 выполняет операции в памяти ПЗУ 220 через канал 221. Данные, так же как и команды для реализации различных функций, хранятся в оперативном запоминающем устройстве (ОЗУ) 230. Процессор 201 выполняет операции считывания и записи в памяти ОЗУ 230 через канал 231.
Обзор операций, выполняемых цифровым преобразователем 20 - фиг.3.
На фиг.3 показаны функции, выполняемые цифровым преобразователем 20 для приведения в действие расходомера 5 на основе эффекта Кориолиса. Процесс 300 обработки начинается на шаге 301, где преобразователь 20 создает сигнал возбуждения. Затем сигнал возбуждения подается в возбудитель 104 через канал 110. На шаге 302 цифровой преобразователь 20 принимает сигналы от тензодатчиков 105 и 105', реагирующих на вибрацию расходомерных трубок 103А-В, когда через эти трубки проходит материал. На шаге 303 цифровой преобразователь 20 формирует данные о сигналах, такие как частота сигнала и разность фаз между сигналами. Затем на шаге 304 вычисляются характеристики материала, протекающего через расходомерные трубки 103А и 103В, такие как удельный массовый расход, плотность и удельный объемный расход. Затем процесс 300 повторяется, пока расходомер 5 на основе эффекта Кориолиса эксплуатируется в трубопроводе.
Процесс формирования данных о сигналах чувствительных элементов согласно настоящему изобретению - фиг.4.
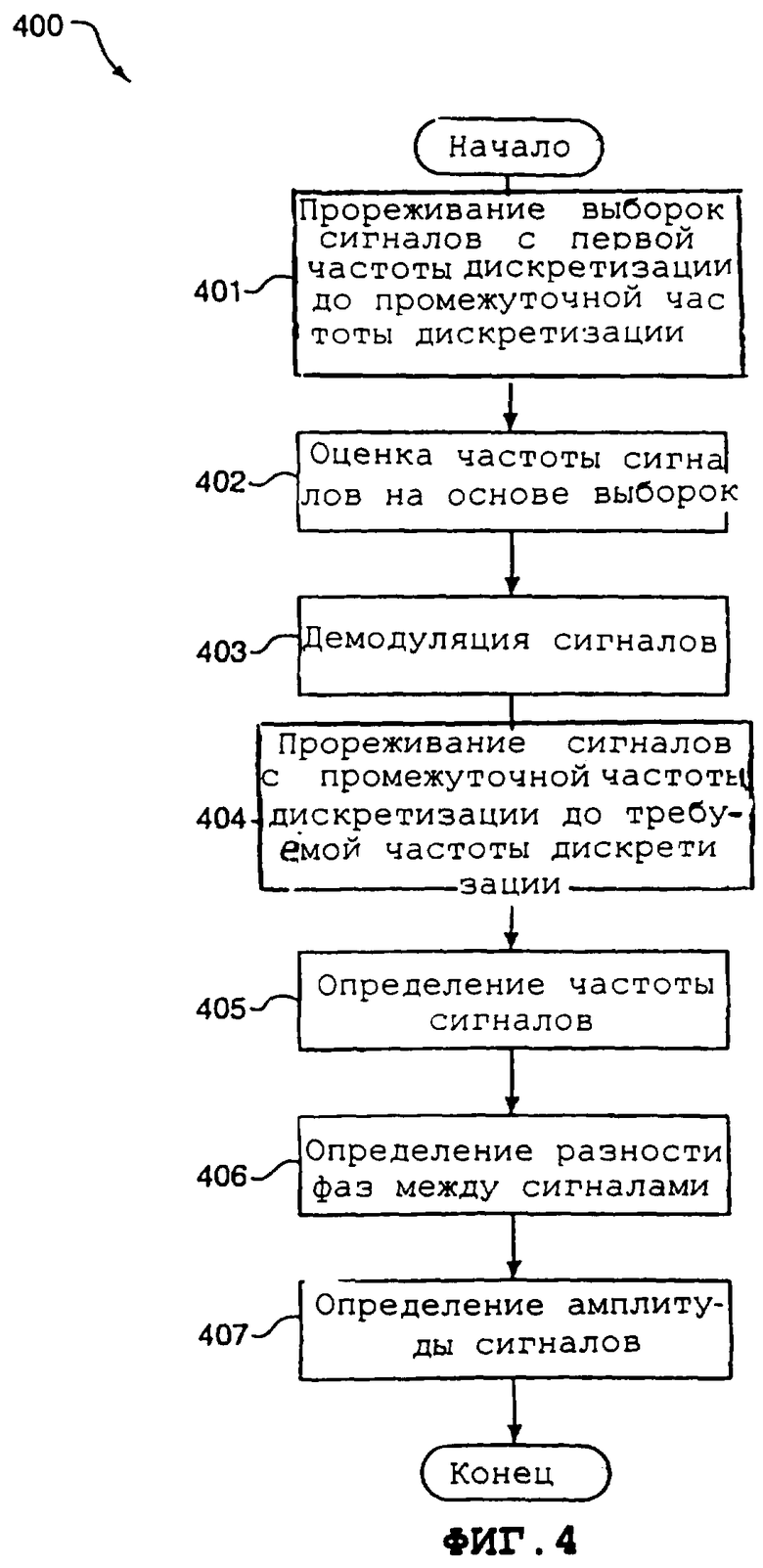
На фиг.4 показан процесс 400, который представляет собой процесс формирования данных, таких как частота сигнала, для сигналов, принимаемых от тензодатчиков 105 и 105', которые измеряют колебания расходомерных трубок 103А-В в расходомере 5 на основе эффекта Кориолиса. Процесс обработки 400 имеет ряд преимуществ при его использовании в цифровом преобразователе 20. Первым преимуществом процесса 400 является то, что точность не теряется, несмотря на использование арифметических операций с конечной точкой вместо арифметических операций с плавающей точкой. Это позволяет использовать дешевый процессор с малым энергопотреблением, такой как ТМS3205ххх, выпускаемый Texas Instrument, ADSP21xx, выпускаемый Analog Devices, или 5306х, выпускаемый Motorola Inc. Второе преимущество состоит в том, что для размещения команд для процесса 400 не требуется большой объем внутренней памяти процессора, что устраняет необходимость иметь высокоскоростную шину между процессором и внешней памятью. Процесс 400 не предъявляет высоких требований к вычислительным ресурсам, что позволяет процессору работать с тактовой частотой, существенно меньшей максимальной.
Процесс 400 начинается на шаге 401 с прореживания частоты дискретизации сигналов, принимаемых от тензодатчиков, с первой частоты дискретизации до второй, меньшей частоты дискретизации. В предпочтительном варианте сигналы прореживают с первой частоты дискретизации 48 кГц до второй частоты дискретизации 4 кГц. Прореживание частот дискретизации увеличивает разрешающую способность сигналов, что повышает точность вычислений, как описано ниже в связи с фиг.5. В предпочтительном варианте уменьшение частоты дискретизации с 48 до 4 кГц увеличивает разрешающую способность выборки с В бит до В+1,79 бит.
На шаге 402 вычисляют оценку частоты сигнала на основе выборочных сигналов. Предпочтительный процесс вычисления оценки частоты сигнала показан на фиг.6. Затем оценку частоты сигнала используют для демодуляции принимаемых сигналов на шаге 403. Процесс демодуляции цифровых сигналов представлен на фиг. 7 и 8. На шаге 404 выполняют второе прореживание выборочных сигналов. Второе прореживание сокращает выборки сигнала со второй частоты дискретизации до третьей частоты дискретизации для увеличения разрешающей способности выборочного сигнала. В предпочтительном варианте уменьшение частоты дискретизации с 4 кГц до 800 Гц увеличивает разрешающую способность до В+2,95 бит. Это сокращение выборок выполняется таким же образом, как прореживание на шаге 401.
После второго прореживания на шаге 404 выполняют вычисления на основе полученных сигналов. Эти вычисления выполняются как часть процесса, показанного на фиг.9. После устранения шума на шаге 405 определяют частоту сигналов от каждого тензодатчика. На шаге 406 определяют разность фаз между сигналом от первого тензодатчика и сигналом от второго тензодатчика. Затем на шаге 407 определяют амплитуду каждого сигнала. После этого процесс 400 повторяется, пока расходомер находится в работе, либо процесс 400 заканчивается.
Процесс прореживания частот дискретизации сигналов от тензодатчиков - фиг.5.
На фиг.5 показан процесс прореживания частоты выборок, получаемых от тензодатчиков. Тот же процесс используют для прореживания, выполняемого на каждом из шагов 401, 404, а также в процессе определения частоты сигнала. На каждом из этих шагов процесс 500 выполняется отдельно для сигналов от каждого тензодатчика. Разница между прореживанием, выполняемым на каждом шаге, заключается в длине векторов входных данных, как описано ниже.
Прореживание, как описано в процессе 500, реализуют с использованием метода блочной обработки при величине входного вектора, равной коэффициенту прореживания. Коэффициент прореживания - это величина, характеризующая уменьшение частоты дискретизации в результате прореживания. Практическим преимуществом использования указанного способа блочной обработки является необходимость повторения процесса с частотой выходных данных, а не с частотой входных данных. Принцип, лежащий в основе рекурсивной блочной фильтрации, состоит в представлении переменных состояния сигналов в следующем виде:
xk+i=A·xk+B·uk,
yk=C·xk+D·uk,
где A, B, C, D - матрицы, представляющие состояние системы;
xk - вектор состояния N+1 в момент времени k;
uk - входные данные и
yk - выходные данные, представляющие прореженный сигнал.
Исходя из принципа индукции очевидно, что

При прореживании сигнала с коэффициентом М сохраняется только каждая М-я выборка. Следовательно, можно исключить все строки выходных данных вышеуказанной матрицы, кроме последней, согласно следующему уравнению:

Из вышесказанного ясно, что количество операций накопления/умножения для одной рекурсии приведенного выше уравнения составит:
NMAC=(N+1)·(N+M),
где NMAC - количество операций накопления/умножения;
N - порядок матрицы А и
М - размер блока, который равен частоте дискретизации процесса.
Следовательно, вычислительная нагрузка для выполнения прореживания составит:
Rsvd=Fout·NMAC,
где Rsvd - вычислительная нагрузка на процессор и
Fout - частота выходных сигналов фильтра.
Память, необходимая для выполнения прореживания, может быть представлена следующим образом:
память для запоминания коэффициента каждого фильтра, которая может представлять собой постоянное запоминающее устройство (ПЗУ);
память для запоминания вектора состояний фильтра хk, которая должна представлять собой оперативное запоминающее устройство для считывания/записи (ОЗУ); и
буферная память для блока входных данных (для считывания-записи).
На фиг.5 показан процесс прореживания с использованием вышеописанного способа блочной обработки. Процесс 500 начинается на шаге 501 с получения m выборок в буфере для создания блока входных данных. Затем блок входных данных на шаге 502 умножают на вектор состояния. После этого на шаге 503 выдаются результаты, представляющие каждую m-ю выборку для использования в других вычислениях. После шага 503 процесс заканчивается.
Процесс обработки для оценки частоты принимаемых сигналов - фиг.6.
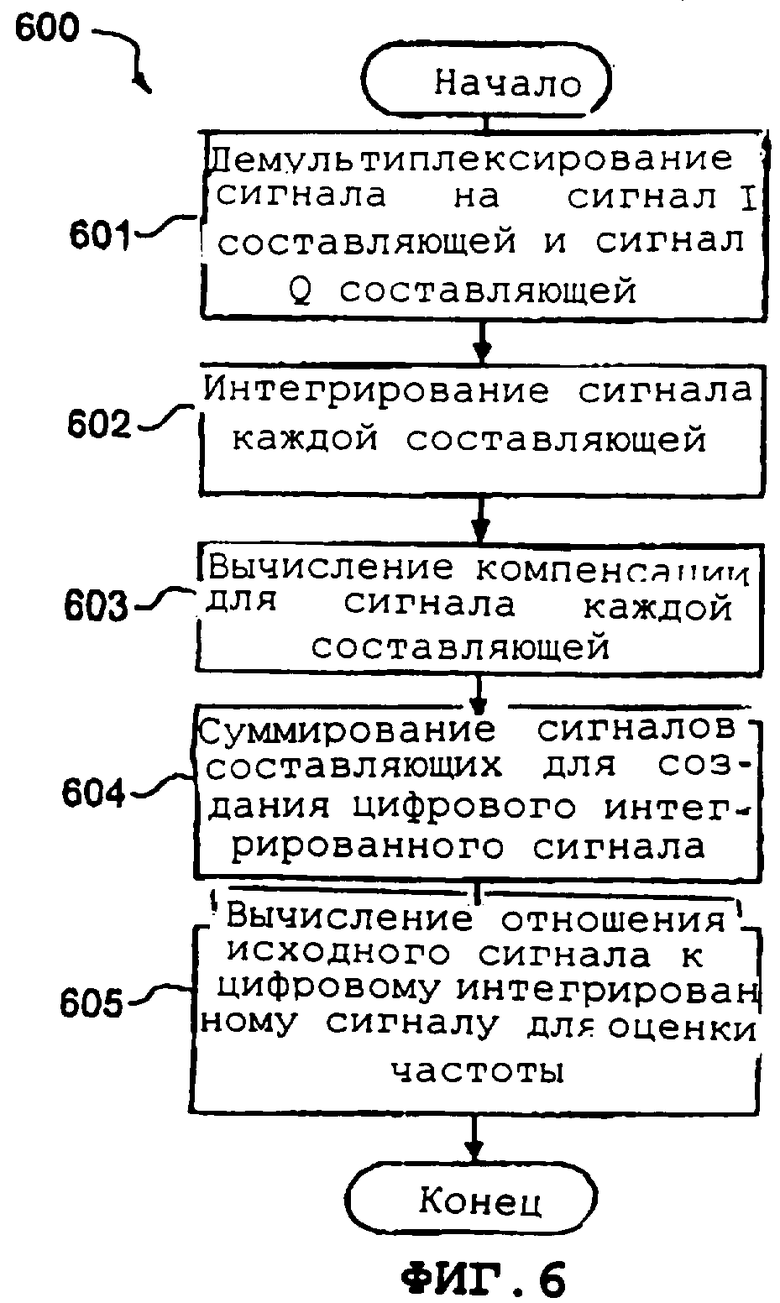
Процесс обработки 600 предназначен для оценки частоты принимаемых сигналов с целью их демодуляции на следующем шаге обработки. Процесс 600 должен заканчиваться на шаге 403 до того, как может быть выполнена демодуляция сигналов. Последующая операция демодуляции описана ниже и показана на фиг.7.
Процесс обработки 600 для оценки частоты сигналов показан на фиг 6. Процесс 600 выполняется с любым одним из принимаемых сигналов. Процесс обработки 600 начинается на шаге 601 с демультиплексирования выборочного цифрового сигнала на синфазную (I) и квадратурную (Q) составляющие. Затем на шаге 602 выполняют цифровое интегрирование I составляющей и Q составляющей сигнала. На шаге 603 вычисляют компенсацию для проинтегрированного сигнала. После этого на шаге 604 составляющие сигнала мультиплексируют для создания цифрового интегрированного сигнала. Затем на шаге 605 вычисляют отношение исходного сигнала к цифровому интегрированному сигналу. Это отношение обеспечивает оценку частоты сигнала, которую можно использовать для демодуляции сигналов в процессе 700.
В процессе 600 для оценки частоты используют фильтры с фиксированными коэффициентами. Таким образом, отпадает необходимость использования рекурсивного алгоритма. Поскольку рекурсивные вычисления отсутствуют, процесс 600 всегда сходится. Кроме того, процесс 600 быстро отслеживает изменения частоты. Оценка частоты по окончании процесса 600 задается следующим уравнением:
Fest=(ω est/2II)x(Fs/12),
где Fest - оценка частоты;
ω est - нормализованная пульсация и
Fs - частота дискретизации.
Процесс обработки для селектора высокой/низкой частоты - фиг.8.
Процесс обработки 800, показанный на фиг.8, является не обязательным и может выполняться между операциями оценки частоты и демодуляции сигнала. Селектор высокой/низкой частоты необходим для определения интересующей частоты. В процессе 1000 (см. фиг.9), в ходе которого точно измеряется частота сигнала, проявляется смещение оценки и более медленная сходимость в диапазоне нормализованных частот:

где F0 - нормализованная частота сигнала.
Из этого уравнения очевидно, что процесс определения частоты неточен, когда частота дискретизации составляет 4 кГц, а частоты измеряемых сигналов низки (20 Гц). Процесс 800 исправляет эту ситуацию, давая возможность использовать процесс 1000 на большом диапазоне частот. Это выполняется путем определения того, имеет ли процесс низкочастотный либо высокочастотный характер, следующим образом. Процесс 800 начинается на шаге 801 с определения того, больше ли оценка частоты, чем эталонная частота. В предпочтительном варианте эталонная частота выбрана равной 250 Гц. Такое значение эталонной частоты выбрано потому, что эта частота лежит в диапазоне стандартных рабочих частот обычных расходомерных трубок и прямых расходомерных трубок.
Если действительная оценка частоты меньше эталонной частоты, то на шаге 803 оценка частоты возвращается к нулевому значению. Если действительная оценка частоты больше эталонной, то оценка частоты вычисляется на шаге 802 как действительная оценка частоты минус 120 Гц.
Процесс обработки для демодуляции принимаемых сигналов - фиг.7.
На фиг.7 показан процесс 700 для демодуляции принимаемых цифровых сигналов. В этом процессе используется оценка частоты, которая была вычислена ранее либо в процессе 600 (фиг.6), либо в процессе 800 (фиг.8). Процесс 700 начинается на шаге 701 с вычисления нормализованной пульсации, которая выражается следующим уравнением:

где ω d - нормализованная пульсация;
Fd - оценка частоты;
Fs - частота дискретизации.
На шаге 702 вычисляется действительное значение "дополнительного множителя" согласно следующему уравнению:
Wk=cos(ω dk),
причем
хβ =Aβ cos(ω dk+φ β ),
где β - сигнал, полученный от любого одного из тензодатчиков.
На шаге 703 вычисляют скалярное произведение "дополнительного множителя" и действительного принятого сигнала согласно следующему уравнению:
 .
.
Следует заметить, что, если процесс 800 выходит на режим низкочастотных колебаний, где оценка частоты равна нулю, то yβ (k)=xβ (k). В противном случае, модулированный выходной сигнал имеет две составляющие, как показано ниже:
 .
.
Однако это можно исправить путем двойного прореживания, как описано ниже. Первая составляющая, соответствующая знаку "-" в вышеуказанном уравнении, представляет интересующий сигнал. Второй сигнал, соответствующий знаку "+" в этом уравнении, будет отфильтрован в следующем процессе прореживания на шаге 905 процесса 900 (фиг.9).
Процесс обработки для формирования данных из полученных сигналов - фиг.9.
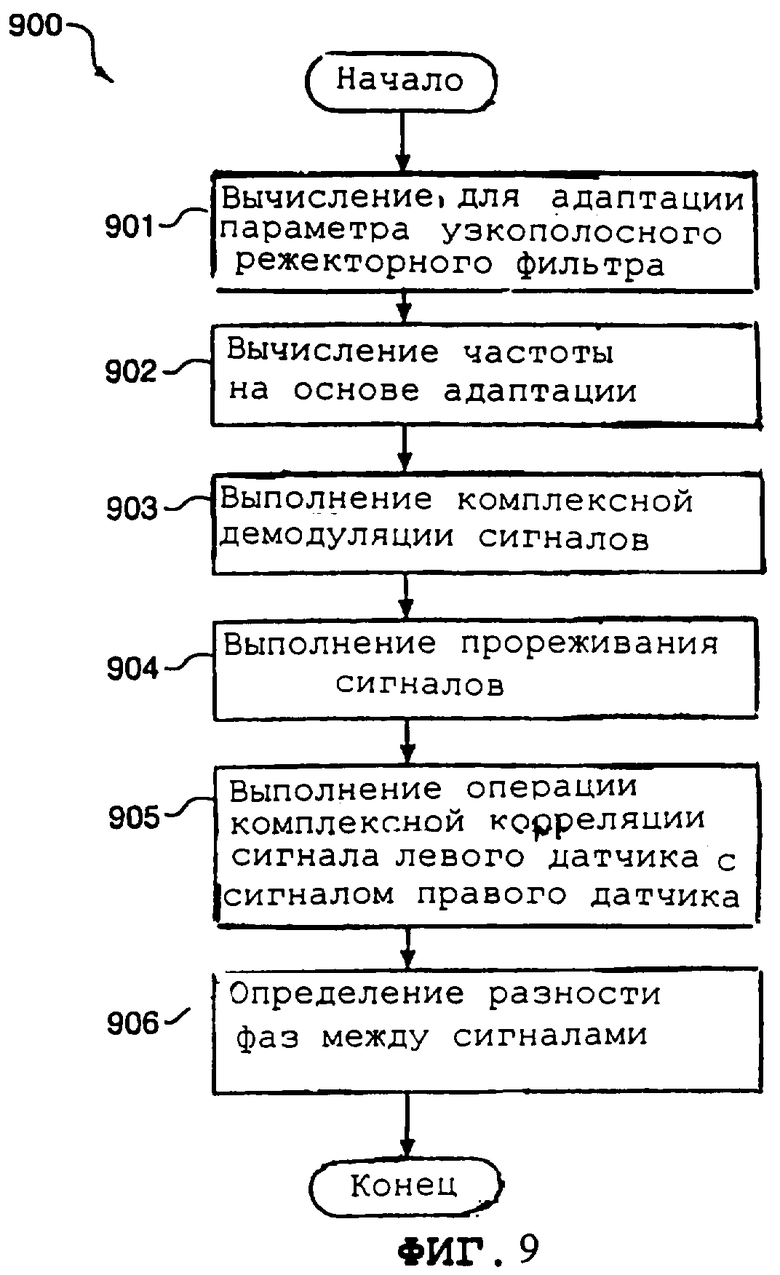
На фиг.9 показан процесс обработки 900 для формирования данных о сигналах, принимаемых от датчиков. Процесс 900 начинается на шаге 901 с расчета для адаптации параметра узкополосного режекторного фильтра, который вычисляют следующим образом. Известно, что параметр узкополосного режекторного фильтра является единым адаптивным параметром, который представляют в виде:

где α <1 - параметр сходимости, регулирующий ширину полосы пропускания фильтра, a a1 - искомый параметр после адаптации. Положим, |a1|<2, и тогда заметим, что
a1=-2 cos(ω ).
Нулевые точки H(z) задаются уравнением:
 ,
,
где z - нулевые точки;
j - константа и
ω - период сигнала.
Следовательно, полюса сигналов выражаются следующим уравнением: р±=α ехр(±jω ).
На шаге 902 вычисляют a1 для каждого сигнала. Вычисление a1 выполняется с использованием одного из многих известных алгоритмов, таких как RLS, RML или SGN. Это позволяет минимизировать энергию сигнала.
На шаге 902 определяют частоту каждого сигнала. Для определения частоты сигнала определяют нормализованную частоту, соответствующую прореженному сигналу, с использованием следующего уравнения:
F0=(1/2П) аrссоs(-a1/2);
где F0 - нормализованная частота, соответствующая прореженному сигналу;
a1 - текущее адаптированное значение параметра узкополосного режекторного фильтра.
Затем на шаге 902 может быть определена частота сигналов путем умножения нормализованной частоты на частоту прореживания (F1=F0×Fs). На шаге 903 выполняется квадратурная демодуляция сигналов. Квадратурную демодуляцию выполняют путем выбора сигнала демодуляции, как показано ниже, где преобладающая частота сигналов смещена в ноль. В процессе 903 вычисляют скалярное произведение сигнала демодуляции и принимаемых сигналов. Сигнал модуляции представляют следующим образом:
ω 0=2ПF0,
где ω 0 - пульсация сигнала модуляции;
F0 - частота нормализованного сигнала, вычисленная на шаге 902.
Как было отмечено выше, принимаемые сигналы могут быть представлены в виде:
хβ (k)=A cos(ω 0k+φ β ),
где β относится к каждому сигналу от тензодатчика 105-105'.
Из вышеприведенных уравнений следует, что выходной сигнал квадратурной модуляции представляет собой:
zβ /(k)=Wkxβ (k)=A/2{ехр(jφ β )+ехр(-j(2ω 0k+φ β ))}.
Для дальнейшего повышения разрешающей способности сигнала выполняют прореживание на шаге 904. В предпочтительном варианте используют прореживание х40, которое выполняют как для I, так и для Q составляющих принимаемых сигналов. Это прореживание сводит результирующий сигнал комплексной квадратурной демодуляции до
 .
.
После выполнения прореживания на шаге 905 определяют разность фаз сигналов. В приведенном в качестве примера варианте разность фаз вычисляют следующим образом. Сначала сопрягается один из сигналов, полученных либо от левого, либо от правого тензодатчика, в соответствии со следующим выражением:

Затем на шаге 905 этот сигнал умножают на второй сигнал для выполнения операции комплексной корреляции между сигналами тензодатчиков, как показано в следующем уравнении:

Далее на шаге 906 определяют разность фаз в соответствии со следующим уравнением:
 .
.
Затем эту разность фаз можно использовать для вычисления удельного массового расхода и других характеристик материала, протекающего через трубку.
Здесь был описан цифровой преобразователь 20 для расходомера 5 на основе эффекта Кориолиса и процессы для определения данных о сигналах, получаемых преобразователем 20. Следует ожидать, что кто-то разработает альтернативные варианты процессоров цифровых сигналов и процессов обработки, которые посягнут на это изобретение, изложенное в приведенной ниже формуле изобретения, либо буквальным образом, либо через доктрину эквивалентов.





Изобретения предназначены для использования в устройствах для измерения характеристик материала (массового расхода, плотности) на основе эффекта Кориолиса. Сигналы датчиков, прикрепленных в двух разных точках вибрирующей расходомерной трубки, с первой частотой дискретизации, принимает процессор цифровых сигналов измерительного электронного блока. Сигналы преобразуют в цифровые и прореживают с первой частоты дискретизации до требуемой частоты дискретизации. Затем на основе цифровых сигналов с требуемой частотой дискретизации определяют частоту принимаемых сигналов. Изобретение представляет собой дешевый процессор с низким энергопотреблением и может быть использовано, в частности, со множеством типов расходомеров, работающих в различных диапазонах рабочих частот. 2 н. и 23 з.п. ф-лы, 9 ил.

| US 5734112 А, 31.03.1998.US 5555190 А, 10.09.1996.ЕР 0791807 А2, 27.08.1997.ЕР 0702212 А2, 20.03.1996.SU 1765699 А1, 30.09.1992. |
