Область техники, к которой относится изобретение
Изобретение относится к подъемным системам (лифтам), в частности, к работающим на растяжение элементам для таких систем.
Уровень техники
Обычная подъемная система (лифт) с канатоведущим шкивом содержит кабину, противовес, два или более каната, соединяющих кабину и противовес, канатоведущий шкив для приведения в движение канатов и силовой механизм для вращения канатоведущего шкива. Канаты выполнены из сплетенной или скрученной стальной проволоки, а шкив сделан из чугунного литья. Силовой механизм может иметь, а может и не иметь редуктора. Силовой механизм с редуктором позволяет использовать высокоскоростной двигатель, который хотя и более компактен и дешев, требует для своего использования больше пространства и дополнительного обслуживания.
Несмотря на то, что обычные круглые стальные канаты доказали свою высокую надежность и экономичность, их использование связано с определенными ограничениями. Одно из таких ограничений обусловлено силами сцепления между канатами и шкивом. Эти силы сцепления могут быть увеличены путем увеличения угла охвата шкива канатами либо нарезанием зарубок в пазах шкива. Оба способа, однако, снижают срок службы канатов в результате повышенного износа (увеличение угла охвата), или как следствие повышения давления на канат (нарезание зарубок). Другим способом повышения сил сцепления является применение втулок из синтетического материала, закладываемых в пазы шкива. При использовании втулок увеличивается коэффициент трения между канатами и шкивом и одновременно уменьшается износ канатов и шкива.
Другое ограничение, связанное с использованием круглых стальных канатов, касается характеристик изгиба и усталости круглых канатов из стальной проволоки. Существующими нормами безопасности подъемных систем определен минимальный диаметр каждого стального каната d (dmin = 8 мм по нормам CEN; dmin = 9,5 мм (3/8'') по нормам ANSI), а также то, что отношение D/d для лифтов с канатоведущим шкивом должно быть больше или равно сорока (D/d≥40), где D - диаметр шкива. Это приводит к тому, что диаметр D шкива оказывается равным не менее 320 мм (380 мм для норм Американского Национального Института Стандартов). Чем больше диаметр шкива D, тем больший вращающий момент должен обеспечивать силовой механизм для приведения в движения подъемной системы.
С появлением синтетических волокон, обладающих высокой прочностью на растяжение и легкостью, возникла мысль заменить в подъемных системах канаты из стального провода на канаты, в которых несущие нагрузку нити выполнены из синтетических волокон, например арамидных волокон. Среди появившихся в последнее время публикаций такие предложения сделаны в патенте США 4022010, выданном Гладденбеку и др.; патенте США 4624097, выданном Уилкоксу; патенте США 4887422, выданном Клесу и др.; и патенте США 5566786, выданном Деанжелису и др. В качестве преимуществ, получаемых в результате замены стальных волокон на арамидные волокна, в этих документах отмечается повышенная прочность на растяжение и улучшенная гибкость арамидных материалов в сочетании с улучшенным сцеплением между синтетическим материалом каната и шкивом.
Другим недостатком обычных круглых канатов является то, что чем выше давление каната, тем короче его срок службы. Давление каната (Рrоре) возникает, когда канат проходит поверх шкива, и прямо пропорционально силе (F) натяжения каната и обратно пропорционально диаметру (D) шкива и диаметру каната d (Prope≈F/(Dd). Кроме этого, форма пазов в шкиве, с учетом таких способов увеличения силы сцепления, как нарезание зарубок в пазах шкива, также способствует увеличению максимального давления каната, действующего на канат.
Даже если гибкость канатов из этих синтетических волокон позволит уменьшить отношение D/d и тем самым уменьшить диаметр D шкива, давление каната, действующее на канат, все еще останется высоким. Обратно пропорциональная зависимость между диаметром D шкива и давлением каната ограничивает возможности снижения диаметра D шкива, которое может быть достигнуто при использовании обычных канатов из арамидных волокон. Кроме этого, арамидные волокна, хотя и обладают высокой прочностью на растяжение, более подвержены повреждению при воздействии поперечных нагрузок. Даже при снижении требований к отношению D/d возникающее давление каната может вызвать преждевременное повреждение арамидных волокон и сократить срок службы канатов.
Из уровня техники известны попытки создания плоских канатов из синтетических волокон, предназначенных (как и в упомянутых выше патентах) для подъемных систем с жестким приводом, но не для подъемных систем с канатоведущим шкивом, в которых на двух концах одного или нескольких канатов подвешены кабина и противовес. Например, в патенте Великобритании 2162283 описывается подъемная система с намоточным барабаном, в которой используются плоские канаты из синтетических волокон с приклеенным эластомерным покрытием. Для кабины и противовеса используются разные канаты, причем когда один из них наматывается на барабан - другой разматывается. Но в отличие от подобных подъемных систем, в системах с канатоведущим шкивом передача тягового усилия осуществляется в основном только за счет сил трения между поверхностью сцепления каната и областью шкива между точками входа в контакт и точками выхода из контакта каната, что обуславливает специфические особенности, которые нужно учитывать при создании канатов, имеющих покрытие. В первую очередь это относится к обеспечению передачи тягового усилия от шкива к покрытию каната и далее к несущим нагрузку элементам каната. Поэтому описанный в упомянутом патенте канат нельзя использовать в системах с канатоведущим шкивом (хотя бы уже потому, что его покрытие не предназначено для передачи перемещающего лифт тягового усилия и оно может просто оторваться от несущих нагрузку тросов).
Ранее предпринимались попытки решения проблем, возникающих при использовании в системах с канатоведущим шкивом обычных круглых канатов, путем использования плоских стальных лент. В частности, в патенте США 1164115, выбранном заявителем в качестве ближайшего аналога, описана система с канатоведущим шкивом, в которой используются плоские стальные ленты для соединения кабины и противовеса и передачи тягового усилия к кабине при прохождении лент поверх вращаемого посредством силового механизма канатоведущего шкива со сцеплением одной из них со шкивом между точкой входа в контакт и точкой выхода из контакта на любой из двух сторон поверхности передачи тягового усилия канатоведущего шкива. Но кроме достижения более равномерного распределения нагрузки, использование подобных стальных плоских канатов не позволяет достичь каких-либо дополнительных преимуществ и им также присущи все недостатки обычных стальных канатов.
Упомянутые особенности подъемных систем с канатоведущим шкивом определяют и особые требования к канатоведущему шкиву. Описание разного вида шкивов или барабанов можно найти в различных публикациях, например, патенте Великобритании 2127934 и патентах США 1491804; 3910559; 4620615; 2017149; 3279762; 2326670; 4292723. В некоторых из этих патентов также предлагается использование втулок шкива, предназначенных в основном для уменьшения износа троса и шкива. Но все они предназначены для обычных круглых канатов и не подходят для использования с предлагаемыми в данном изобретении плоскими канатами (работающими на растяжение элементами) с эластомерным покрытием.
Несмотря на описанные выше трудности, ученые и инженеры под руководством заявителя работают над созданием более эффективных и надежных способов и устройств для приведения в движение подъемных систем.
Сущность изобретения
Согласно настоящему изобретению работающий на растяжение элемент для подъемной системы имеет коэффициент формы, больший единицы, причем коэффициент формы определяется как отношение ширины w работающего на растяжение элемента к его толщине t (коэффициент формы = w/t).
Основным признаком настоящего изобретения является плоская форма работающего на растяжение элемента. Увеличение коэффициента формы позволяет создать работающий на растяжение элемент, имеющий оптимальную с точки зрения распределения давления на канат поверхность соприкосновения, определяемую шириной элемента. При этом снижается максимальное значение давления внутри работающего на растяжение элемента. Кроме того, увеличивая коэффициент формы по сравнению с круглым канатом, коэффициент формы которого равен единице, толщина работающего на растяжение элемента может уменьшаться с одновременным сохранением постоянства поперечного сечения работающего на растяжение элемента.
Кроме того, в настоящем изобретении работающий на растяжение элемент содержит несколько отдельных несущих нагрузку тросов (кордов), заключенных в слой общего полиуретанового покрытия. Слой покрытия разделяет отдельные корды и определяет поверхность сцепления с канатоведущим шкивом.
Благодаря форме работающего на растяжение элемента давление каната может быть распределено по работающему на растяжение элементу более равномерно. В результате максимальное давление каната значительно меньше по сравнению с лифтами с обычными канатами, имеющими ту же грузоподъемность. Более того, эффективный диаметр каната d (измеренный в направлении изгиба) уменьшается при той же грузоподъемности, в результате чего могут быть использованы шкивы с меньшим диаметром D без снижения отношения D/d. Кроме этого, уменьшение диаметра D шкива дает возможность применять в качестве приводного двигателя более дешевые, более компактные и высокоскоростные двигатели, при этом отпадает необходимость в использовании редуктора.
В другом варианте конструктивного выполнения настоящего изобретения отдельные корды сформированы из неметаллических скруток (стренг), например из арамидных волокон. Благодаря введению в работающий на растяжение элемент корда, имеющего вес, прочность, долговечность и, особенно, характеристики изгиба, как у таких материалов, в настоящем изобретении допустимый диаметр канатоведущего шкива может быть еще уменьшен при сохранении максимального давления каната в заданных пределах. Как отмечалось ранее, при использовании шкивов меньшего диаметра уменьшается и требуемый вращательный момент силового механизма, вращающего шкив, и повышается скорость вращения. Поэтому для приведения в движение подъемной системы могут быть использованы силовые механизмы, имеющие меньшие размеры и стоимость.
В другом дополнительном варианте выполнения настоящего изобретения отдельные корды выполнены из скруток металла, например стали. Благодаря введению в работающий на растяжение элемент металлического корда, обладающего характеристиками гибкости, обусловленными соответствующим выбором размеров и конструкции, в настоящем изобретении допустимый диаметр канатоведущего шкива может быть уменьшен при сохранении максимального давления каната в заданных пределах.
Еще в одном конкретном варианте выполнения настоящего изобретения тяговый привод для подъемной системы содержит работающий на растяжение элемент с коэффициентом формы больше единицы и приводной канатоведущий шкив (для краткости называемый также далее "приводной шкив" или ''шкив''), форма поверхности передачи тягового усилия которого выполнена по форме как поверхность приема поверхности сцепления работающего на растяжение элемента. Работающий на растяжение элемент имеет поверхность сцепления, определяемую шириной работающего на растяжение элемента. Поверхность передачи тягового усилия шкива и поверхность сцепления имеют взаимодополняющие (сопряженные) профили для передачи тягового усилия и для того, чтобы направлять работающий на растяжение элемент по шкиву. В другом варианте выполнения тяговый привод содержит несколько работающих на растяжение элементов, находящихся в сцеплении со шкивом, а шкив имеет пару фланцев, расположенных с противоположных сторон шкива, и одну или несколько перегородок, расположенных между соседними работающими на растяжение элементами. Пара фланцев и перегородки выполняют функцию направляющих для работающего на растяжение элемента, предотвращая большие перекосы в случае ослабления натяжения каната и др.
Еще в одном варианте выполнения поверхность передачи тягового усилия шкива определена материалом, оптимизирующим силы сцепления между шкивом и работающим на растяжение элементом и снижающим износ работающего на растяжение элемента. В одной из конструкций поверхность передачи тягового усилия совпадает с поверхностью втулки шкива, надетой на шкив. В другой конструкции поверхность передачи тягового усилия определена покрытием, нанесенным на приводной шкив. Еще в одной конструкции приводной шкив выполнен из материала, которым и определяется поверхность передачи тягового усилия.
Хотя описываемый здесь тяговый привод предназначен, в основном, для использования в подъемных системах с приводным шкивом, применение работающего на растяжение элемента может оказаться полезным и выгодным в подъемных системах, не использующих приводной шкив для приведения в движение работающего на растяжение элемента, например в подъемных системах, не использующих канаты непосредственно, в подъемных системах с линейными двигателями или в подъемных системах с противовесом, в которых подъемный механизм установлен на кабине. В таких вариантах применения уменьшение размеров шкива может быть полезно для снижения требований к объему пространства, необходимого для размещения подъемной системы. Описанные выше и другие цели, признаки и преимущества настоящего изобретения станут более ясны из приведенного ниже подробного описания примеров его выполнения, проиллюстрированных приложенными чертежами.
Перечень фигур чертежей и иных материалов
На Фиг.1 представлено аксонометрическое изображение подъемной системы с тяговым приводом в соответствии с настоящим изобретением.
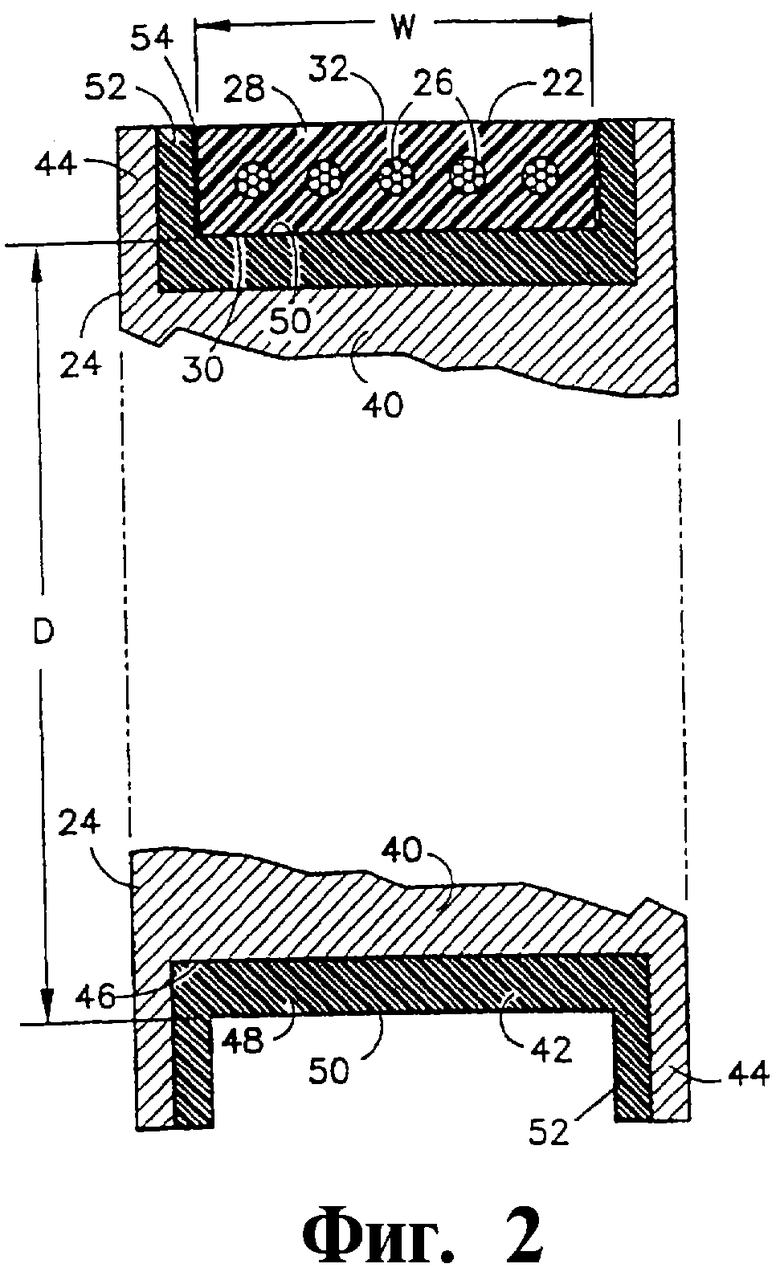
На Фиг. 2 представлен вид сбоку поперечного сечения тягового привода, показывающий работающий на растяжение элемент, и шкив.
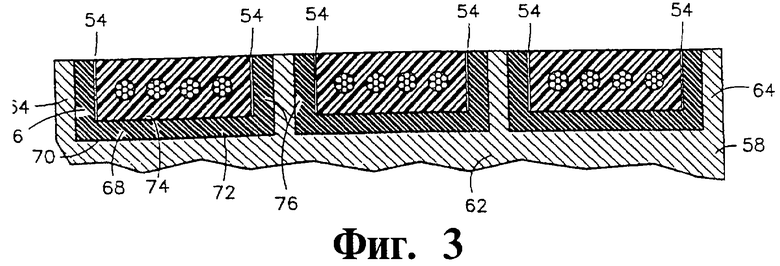
На Фиг. 3 представлен вид сбоку поперечного сечения другого варианта выполнения, показывающий несколько работающих на растяжение элементов.
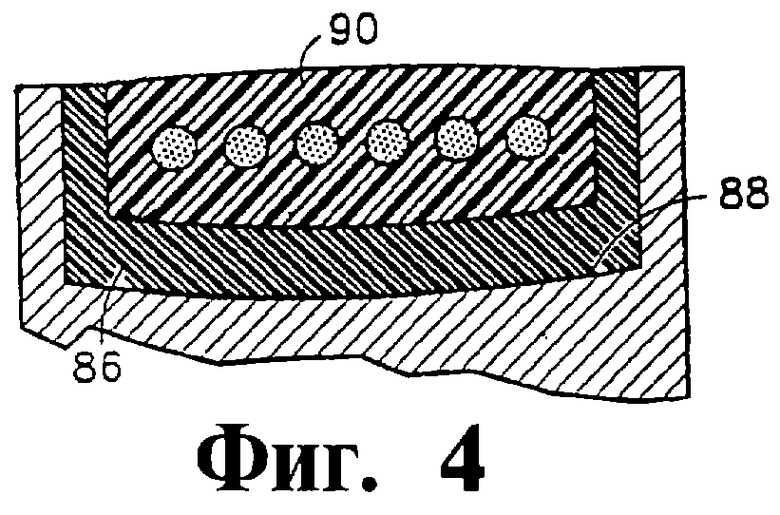
На Фиг.4 представлен еще один вариант выполнения, показывающий приводной шкив, имеющий вогнутую форму для центровки работающего на растяжение элемента.
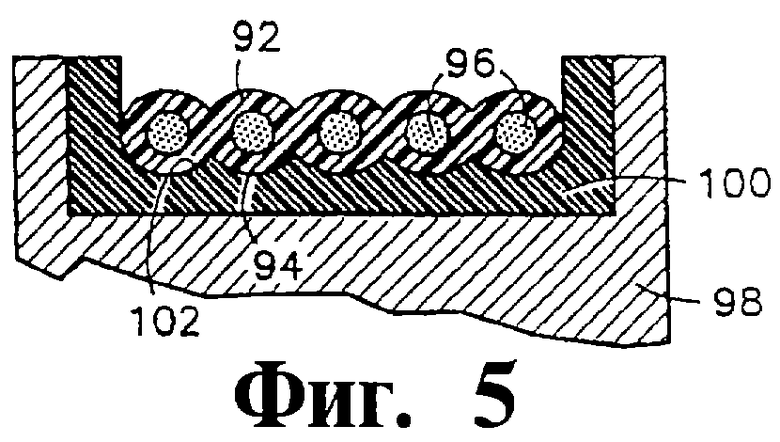
На Фиг.5 представлен еще один вариант выполнения, показывающий приводной шкив и работающий на растяжение элемент, которые имеют взаимодополняющие профили для улучшения сцепления и для обеспечения стыковки между работающим на растяжение элементом и шкивом.
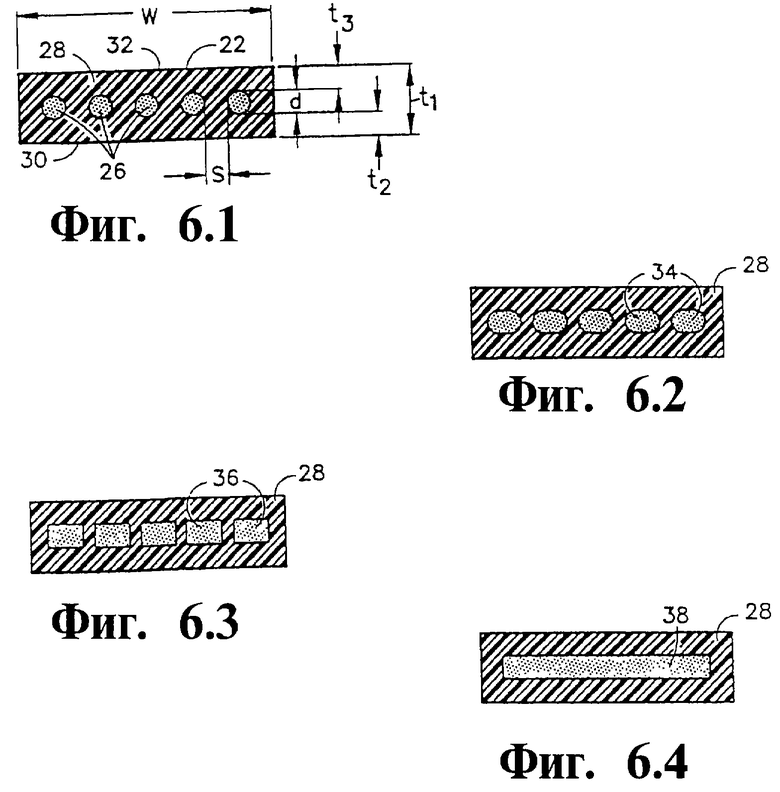
На Фиг.6.1 представлен вид поперечного сечения работающего на растяжение элемента; на Фиг. 6.2 представлен вид поперечного сечения другого варианта конструкции работающего на растяжение элемента; Фиг.6.3 представлен вид поперечного сечения еще одного варианта конструкции работающего на растяжение элемента и на Фиг.6.4 представлен вид поперечного сечения еще одного варианта выполнения работающего на растяжение элемента.
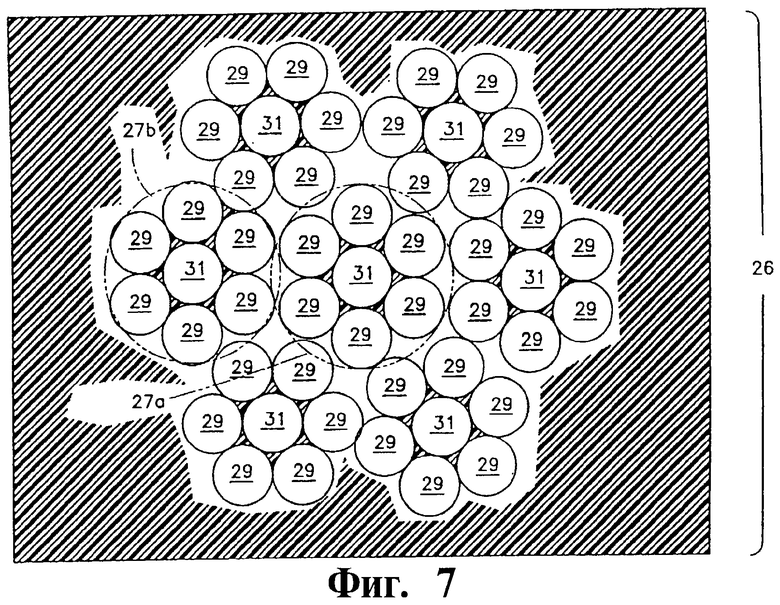
На Фиг. 7 представлен увеличенный вид поперечного сечения одного корда другого варианта выполнения настоящего изобретения, содержащего шесть скруток, обвитых вокруг центральной скрутки.
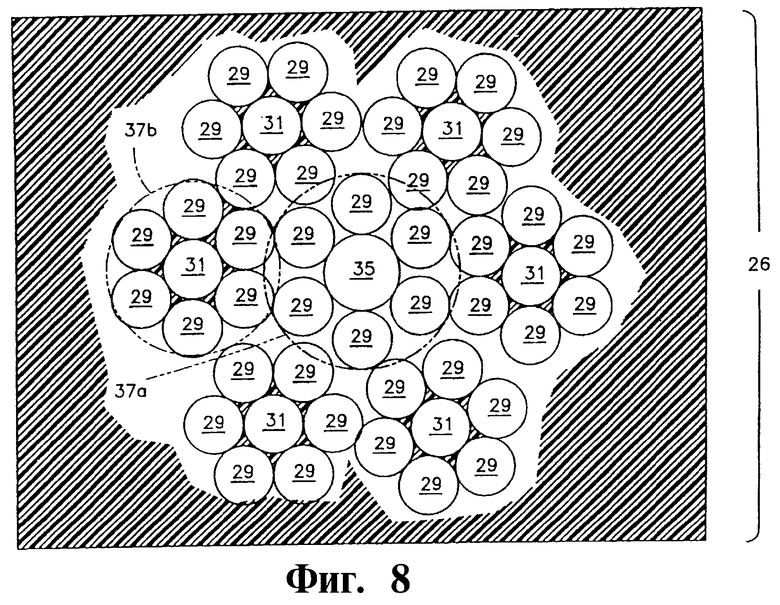
На Фиг.8 представлен увеличенный вид поперечного сечения другого варианта выполнения одного корда.
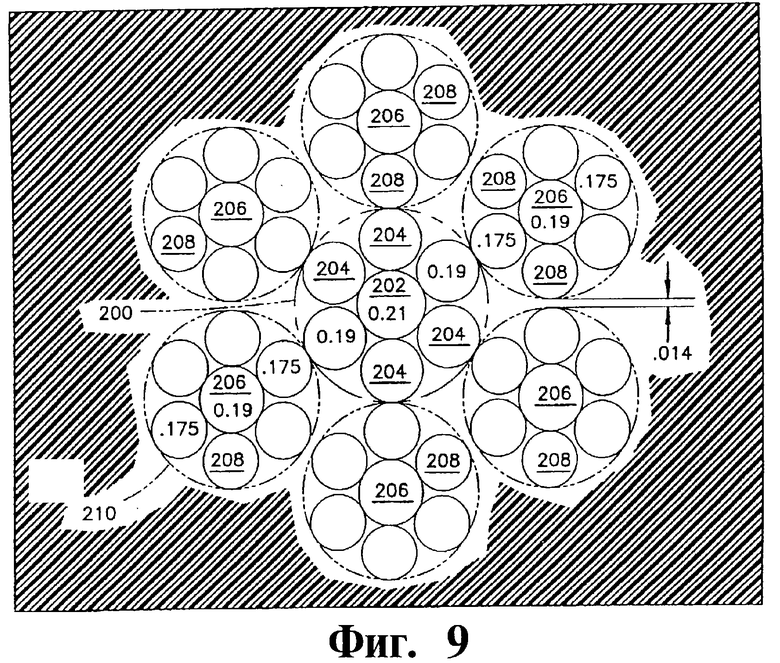
На Фиг.9 представлен увеличенный вид поперечного сечения еще одного варианта выполнения изобретения.
Сведения, подтверждающие возможность осуществления изобретения
На Фиг. 1 представлена подъемная система (лифт) 12 с тяговым приводом. Подъемная система 12 содержит кабину 14, противовес 16, тяговый привод 18 и тяговый механизм 20. Тяговый привод 18 содержит работающий на растяжение элемент 22, прикрепленный к кабине 14 и противовесу 16, и приводной канатоведущий шкив 24, называемый далее "приводной шкив" или просто "шкив". Работающий на растяжение элемент 22 находится в зацеплении со шкивом 24 так, что вращением шкива 24 перемещается работающий на растяжение элемент 22 и посредством него кабина 14 и противовес 16. Таким образом, тяговое усилие между шкивом 24 и работающим на растяжение элементом 22 является средством перемещения кабины и противовеса. Тяговый механизм 20 соединен со шкивом 24 и вращает шкив 24. Несмотря на то что изображен тяговый механизм 20 с редуктором, следует отметить, что такая конструкция показана только в качестве иллюстрации, а в настоящем изобретении могут быть использованы тяговые механизмы как с редуктором, так и без редуктора.
На Фиг. 2 работающий на растяжение элемент 22 и шкив 24 показаны более подробно. Работающий на растяжение элемент 22 представляет собой единое устройство, в котором объединено несколько кордов (тросов) 26 внутри общего слоя 28 покрытия (оболочки). Каждый из кордов 26 образован сплетенными или скрученными стренгами (скрутками) высокопрочных синтетических неметаллических волокон, например имеющихся на рынке арамидных волокон. Корды 26 имеют одинаковую длину, приблизительно равномерно распределены по поперечному сечению слоя покрытия и расположены линейно по ширине. Слой 28 покрытия выполнен из полиуретана, предпочтительно из термопластичного уретана, которым спрессовываются несколько кордов 26 таким образом, чтобы воспрепятствовать продольному перемещению каждого отдельного корда 26 относительно остальных кордов 26. Другим вариантом может быть покрытие из прозрачного материала, преимуществом которого является возможность визуальной проверки состояния плоского каната. Для слоя 28 покрытия могут быть использованы и другие материалы, если по своим характеристикам они подходят для выполнения функций слоя покрытия: растяжение, износ, передача тяговых нагрузок кордам 26 и стойкость по отношению воздействия факторов окружающей среды. Следует понимать что хотя для покрытия могут быть использованы и другие материалы, в том случае, если их механические свойства будут отличаться от свойств термопластичного уретана, преимущества, получаемые от использования плоских канатов, могут уменьшиться. При использовании материала с механическими характеристиками термопластичного уретана диаметр шкива можно сократить до 100 мм и менее. Слоем 28 покрытия определяется поверхность зацепления, находящаяся в соприкосновении с соответствующей поверхностью приводного шкива 24.
Как показано более подробно на Фиг.6.1, работающий на растяжение элемент 22 имеет ширину w, измеренную в направлении, поперечном относительно длины работающего на растяжение элемента 22, и толщину t1, измеренную в направлении изгиба работающего на растяжение элемента 22 вокруг шкива 24. Каждый из кордов 26 имеет диаметр d и разнесен от остальных на расстояние s. Кроме того, толщина слоя 28 покрытия между кордами 26 и поверхностью 30 сцепления, определяемая как t2, и толщина между кордами 26 и противоположной поверхностью, определяемая как t3, дают в сумме t1=t2+t3+d.
Габаритные размеры работающего на растяжение элемента 22 дают коэффициент формы, значительно превышающий единицу, причем коэффициент формы определяется как отношение ширины w к толщине t1(коэффициент формы = w/t1). Коэффициент формы, равный единице, соответствует круглому поперечному сечению, какое имеют обычные круглые канаты. Чем большую величину имеет коэффициент формы, тем более плоским в поперечном сечении является работающий на растяжение элемент 22. Чем более плоским становится работающий на растяжение элемент 22, тем меньше его толщина t1 и больше его ширина w, без изменения площади его поперечного сечения и грузоподъемности. При такой конфигурации распределение давления каната происходит по ширине работающего на растяжение элемента 22 и снижается максимальное давление каната по сравнению с круглым канатом сопоставимых поперечного сечения и грузоподъемности. Как показано на Фиг.2, для работающего на растяжение элемента 22, содержащего пять отдельных кордов 26, расположенных внутри слоя 28 покрытия, коэффициент формы превышает пять. Хотя на чертеже изображен работающий на растяжение элемент 22 с коэффициентом формы, превышающим пять, считается, что преимуществом обладает элемент с коэффициентом формы больше единицы и, особенно, больше двух.
Интервал s между соседними кордами 26 зависит от материалов и процесса изготовления работающего на растяжение элемента 22 и распределения напряжений в нем. С точки зрения веса желательно сокращать интервал s между соседними кордами 26, уменьшая тем самым количество материала покрытия между кордами 26. Учет распределения напряжений в канате, однако, может ограничивать сближение кордов 26 друг с другом в стремлении избежать возникновения чрезмерных напряжений в слое 28 покрытия между соседними кордами 26. Пользуясь этими соображениями, интервал можно оптимизировать для конкретных требований по грузоподъемности.
Толщина t2 слоя 28 покрытия определяется распределением напряжений в канате и износостойкостью материала слоя 28 покрытия. Как и раньше, желательно избежать чрезмерных напряжений в слое 28 покрытия, в то же время сохранив достаточно материала для обеспечения расчетного срока службы работающего на растяжение элемента 22.
Толщина t3 слоя 28 покрытия зависит от области применения работающего на растяжение элемента 22. Как показано на Фиг.1, работающий на растяжение элемент 22 огибает одиночный шкив 24, поэтому верхняя поверхность 32 не входит в соприкосновение с шкивом 24. При таком использовании толщина t3 может быть очень небольшой, хотя и достаточной для того, чтобы выдержать напряжение, возникающее, когда работающий на растяжение элемент 22 обходит шкив 24. Также может быть желательным сделать желобки в поверхности 32 работающего на растяжение элемента с целью снижения растяжения в области толщиной t3. С другой стороны, толщина t3, равная толщине t2, может понадобиться в том случае, если работающий на растяжение элемент 22 используется в подъемной системе, где требуется перегиб работающего на растяжение элемента 22 в обратную сторону вокруг второго шкива. При таком использовании верхняя и нижняя поверхности 32 и 30 работающего на растяжение элемента 22 являются поверхностями сцепления и к ним предъявляются одинаковые требования в отношении износа и напряжений.
Диаметр d отдельных кордов 26 и число кордов 26 зависит от области применения. Является желательным иметь толщину d как можно меньшей, чтобы, как отмечалось выше, достичь максимальной гибкости и снизить напряжения в кордах 26.
Несмотря на то что на чертеже, представленном на Фиг.2, изображено несколько круглых кордов 26, находящихся внутри слоя 28 покрытия, в работающем на растяжение элементе 22 могут использоваться и отдельные корды другого типа, включая и те, которые имеют коэффициент формы, превышающий единицу, по соображениям стоимости, долговечности и простоты изготовления. В качестве примера приводятся корды 34 овальной формы (Фиг.6.2), корды 36 плоской или прямоугольной формы (Фиг.6.3), или одиночный плоский корд 38, распределенный по ширине работающего на растяжение элемента 22, как показано на Фиг.6.4. Преимущество варианта выполнения, показанного на Фиг.6.4, состоит в том, что распределение давления корда может быть более равномерным и поэтому максимальное давление корда внутри работающего на растяжение элемента 22 может быть меньше, чем в других конфигурациях. Поскольку корды заключены внутри слоя покрытия и поскольку слой покрытия определяет поверхность сцепления, действительная форма кордов менее важна с точки зрения передачи тягового усилия и может быть оптимизирована по другим соображениям.
В другом предпочтительном варианте выполнения каждый из кордов 26 сформирован из семи скрученных стренг (скруток), каждая из которых скручена из семи металлических проволок. В предпочтительном варианте выполнения такой конфигурации используется высокоуглеродистая сталь. Желательно, чтобы сталь была холоднотянутой и с гальваническим покрытием, что обеспечит высокие характеристики прочности и коррозионной стойкости. Желательно, чтобы слой покрытия был выполнен из полиуретана, который либо имеет огнеупорную основу, либо содержит антипиреновые компоненты.
В предпочтительном варианте выполнения с использованием стального корда, изображенном на Фиг. 7, каждая скрутка 27 корда 26 содержит семь проволок, причем шесть проволок 29 закручены вокруг центральной проволоки 31. Каждый корд 26 содержит одну скрутку 27а, расположенную по центру, и шесть дополнительных наружных скруток 27b, которые закручены вокруг центральной скрутки 27а. Желательно, чтобы закручивание отдельных проволок 29, составляющих центральную скрутку 27а, вокруг центральной проволоки 31 центральной скрутки 27а происходило в одну сторону, а закручивание проволок 29 наружных скруток 27b вокруг центральной проволоки 31 наружных скруток 27b происходило в другую сторону. Наружные скрутки 27b закручиваются вокруг центральной скрутки 27а в том же направлении, что и проволоки 29 вокруг центральной проволоки 31 в скрутке 27а. Например, в одном варианте выполнения отдельные скрутки содержат центральную проволоку 31, обмотанную шестью проволоками 29 по часовой стрелке в центральной скрутке 27а; проволоки 29 в наружных скрутках 27b навиты против часовой стрелки вокруг своих центральных проволок 31, в то время как наружные скрутки 27b корда 26 намотаны вокруг центральной скрутки 27а по часовой стрелке. Соблюдение правил скручивания улучшает распределение нагрузки между всеми проволоками корда.
Для успешного выполнения данного варианта изобретения является важным использовать очень тонкую проволоку 29. Диаметр каждой проволоки 29 и 31 меньше 0,25 мм, и желательно, чтобы диаметр находился в интервале от 0,10 мм до 0,20 мм. В конкретном варианте выполнения диаметр проволок составляет 0,175 мм. Малый диаметр проволок в предпочтительном варианте выполнения способствует получению выигрыша за счет использования шкива малого диаметра. Проволока меньшего диаметра может выдержать меньший радиус изгиба на шкиве меньшего диаметра (около 100 мм диаметром), не создавая чрезмерных напряжений на скрутке в плоском канате. Благодаря введению в данном конкретном варианте выполнения нескольких тонких кордов 26, желательно, полным диаметром около 1,6 мм, в плоский эластомер каната, давление на каждый корд по сравнению с известными канатами значительно снижается. Давление корда падает, по крайней мере, как n-1/2, где n - число параллельных кордов в плоском канате при данных параметрах нагрузки и поперечном сечении проволоки.
В другом варианте выполнения конструкции изобретения, содержащей корд, выполненный из металлических материалов, представленном на Фиг.8, центральная проволока 35 центральной скрутки 37а каждого корда 26 имеет большой диаметр. Например, если используются проволоки 29 из предыдущего варианта выполнения (0,175 мм), центральная проволока 35 только центральной скрутки всего корда будет иметь диаметр около 0,20-0,22 мм. Цель такого изменения диаметра центральной проволоки состоит в том, чтобы уменьшить контакт между проволоками 29, окружающими проволоку 35, а также уменьшить контакт между скрутками 37b, обвитыми вокруг скрутки 37а. В таком варианте выполнения диаметр корда 26 окажется несколько больше, чем диаметр 1,6 мм в предыдущем варианте.
В третьем варианте выполнения конструкции изобретения, содержащей корд, выполненный из металлических материалов, представленном на Фиг.9, показано развитие концепции варианта, представленного на Фиг.8, с дальнейшим уменьшением контактов между проволоками и скрутками. Для создания корда в соответствии с изобретением в данном варианте используется проволока трех различных размеров. В этом варианте самой толстой является центральная проволока 202 в центральной скрутке 200. Проволоки 204 промежуточного размера расположены вокруг центральной проволоки 202 центральной скрутки 200 и поэтому составляют часть центральной скрутки 200. Проволока 204 промежуточного размера также является и центральной проволокой 206 всех наружных скруток 210. Номером 208 обозначены самые тонкие из используемых проволок. Такими проволоками обвита каждая проволока 206 в каждой наружной скрутке 210. Все проволоки в данном варианте имеют диаметр менее 0,25 мм. Примером может служить конструкция, в которой проволоки 202 имеют диаметр 0,21 мм; проволоки 204 могут быть диаметром 0,19 мм; а проволоки 208 могут иметь диаметр 0,175 мм. Надо иметь в виду, что в данном варианте проволоки 204 и 206 имеют одинаковые диаметры и имеют различные обозначения только для индикации их размещения. Следует отметить, что равенство диаметров проволок 204 и 206 не ограничивает настоящее изобретение. Все указанные диаметры проволок приведены только для иллюстрации и могут быть изменены при соблюдении правила соединения, предусматривающего снижение контактов между внешними проволоками центральной скрутки, снижение контактов между внешними проволоками наружных скруток и снижение контактов между наружными скрутками. В приведенном примере (только для целей иллюстрации) интервал между внешними проволоками наружных скруток составляет 0,014 мм.
Возвращаясь к Фиг.2, рассмотрим приводной шкив 24, включающий основание 40 и втулку 42. Основание 40 выполнено из чугуна и имеет два фланца 44 с противоположных сторон шкива 24, образующих паз 46. Втулка 42 содержит основание 48, имеющее поверхность 50 передачи тягового усилия и два бортика 52, упирающиеся в фланцы 44 шкива 24. Втулка 42 выполнена из полиуретана, например, описанного в патенте США 5112933 для подъемной системы с круглым канатом, или любой другой подходящий материал, обеспечивающий требуемые сцепление с поверхностью 30 сцепления слоя 28 покрытия и износоустойчивость. Среди элементов, входящих в тяговый привод 18, желательно, чтобы износу подвергалась втулка 42 шкива, а не шкив 24 или работающий на растяжение элемент 22 в силу высокой стоимости замены работающего на растяжение элемента 22 или шкива 24. Втулка 42 таким образом выполняет роль расходного слоя в тяговом приводе 18. Втулка 42 удерживается внутри паза 46 или приклейкой, или каким-либо другим обычным способом. Втулка 42 определяет поверхность 50 передачи тягового усилия, выполненную по форме как поверхность приема поверхности сцепления работающего на растяжение элемента 22. Поверхность 50 передачи тягового усилия имеет диаметр D. Сцепление между поверхностью 50 передачи тягового усилия и поверхностью 30 сцепления обеспечивает передачу тягового усилия для приведения в движения подъемной системы 12. Диаметр шкива, предназначенного для использования совместно с работающим на растяжение элементом, описанным выше, значительно уменьшен по сравнению с диаметром используемых шкивов. В частности, диаметр шкивов, предназначенных для использования с плоским канатом в соответствии с настоящим изобретением, может быть уменьшен до 100 мм и менее. Для специалиста понятно, что подобное уменьшение диаметра шкива позволяет использовать силовой механизм значительно меньших размеров. Фактически размеры силового механизма могут быть уменьшены вчетверо относительно обычных размеров при использовании, например, в безредукторном приводе типичного лифта с грузоподъемностью 8 человек в невысоком здании. Это обусловлено тем, что при использовании 100 мм шкива требования к моменту вращения снижаются приблизительно вчетверо, а число оборотов двигателя растет. Соответственно падает и стоимость такого силового механизма.
Несмотря на то что в представленном примере используется втулка 42, для специалиста должно быть очевидно, что работающий на растяжение элемент 22 может быть использован совместно со шкивом, и не имеющим втулки 42. В другом варианте конструкции втулка 42 может быть заменена нанесением на шкив покрытия из специального материала, например полиуретана, либо шкив может быть отлит или отформован из подходящего синтетического материала. Такие варианты могут оказаться выгодными, если будет установлено, что благодаря уменьшенному размеру шкива, его замена целиком дешевле замены втулок шкива.
Поверхность сцепления может иметь профиль, выполненный как направляющая работающего на растяжение элемента 22 при его взаимодействии со шкивом. Например, форма шкива 24 и втулки 42 определяет то пространство 54, куда входит работающий на растяжение элемент 22. Фланцы 44 и бортики 52 втулки 42 ограничивают зону соединения работающего на растяжение элемента 22 и шкива 24 и так направляют это соединение, чтобы не допустить соскакивания работающего на растяжение элемента 22 со шкива 24.
Другой вариант тягового привода 18 показан на Фиг.3. В этом варианте выполнения тяговый привод 18 содержит три работающих на растяжение элемента 56 и приводной шкив 58. Каждый из работающих на растяжение элементов 56, имеет конструкцию, аналогичную работающему на растяжение элементу 22, описанному выше в связи с изображениями на Фиг.1 и 2. Приводной шкив 58 имеет базу 62, два фланца 64, расположенных на противоположных сторонах шкива 58, две перегородки 66 и три втулки 68. Перегородки 66 разнесены вбок от фланцев 64 и друг от друга таким образом, что образуют три паза 70, в которых установлены втулки 68. Так же, как и втулка 42, описанная со ссылкой на Фиг.2, каждая втулка 68 имеет основание 72, которое определяет поверхность 74 передачи тягового усилия при контакте с одним из работающих на растяжение элементов 56, и два бортика 76, которые упираются во фланцы 64 или перегородки 66. Так же, как и на Фиг.2, втулка 42 достаточно широка для того, чтобы между краями работающего на растяжение элемента и бортиками 76 втулки 42 существовал зазор 54.
Другая конструкция тягового привода 18 показана на Фиг.4 и 5. На Фиг.4 показан шкив 86, имеющий поверхность, выполненную по форме как поверхность приема поверхности сцепления работающего на растяжение элемента, например вогнутую поверхность 88 передачи тягового усилия. Форма поверхности 88 передачи тягового усилия способствует во время работы центровке плоского работающего на растяжение элемента 90. На Фиг.5 показан работающий на растяжение элемент 92, имеющий поверхность 94 сцепления слоя покрытия с профилем усиленного сцепления между приводным шкивом и работающим на растяжение элементом, сформированным посредством запрессованных внутрь кордов 96. На приводной шкив 98 надета втулка 100, форма поверхности передачи тягового усилия которой выполнена дополняющей профиль поверхности работающего на растяжение элемента 92, как средство увеличения тягового усилия между втулкой (шкивом) и работающим на растяжение элементом. Взаимодополняющая конфигурация способствует правильной ориентации работающего на растяжение элемента 92 в процессе зацепления и, кроме того, увеличивает силы сцепления между работающим на растяжение элементом 92 и приводным шкивом 98.
При использовании работающих на растяжение элементов и тяговых приводов согласно настоящему изобретению можно добиться существенного снижения максимального давления каната с соответствующим сокращением диаметра шкива и требований к величине крутящего момента. Снижение максимального давления каната связано с поперечным сечением работающего на растяжение элемента, имеющего коэффициент формы, превышающий единицу. Для такой конфигурации, считая, что работающий на растяжение элемент имеет форму, как показано на Фиг. 6.4, величина максимального давления каната может быть приближенно определена выражением
Рmax=(2F/Dw),
где F - максимальная растягивающая сила в работающем на растяжение элементе. Для других конфигураций, показанных на Фиг.6.1-4, максимальное давление каната будет приблизительно тем же самым, хотя и несколько выше благодаря дискретному характеру корда, состоящего из отдельных проволок. Для круглого каната с круглым пазом максимальное давление определяется как Рmax≡(2F/Dd)(4/π).
Коэффициент (4/π) обуславливает почти 27%-ное увеличение максимального давления каната при сравнимых диаметрах и растягивающих силах. Более важно то, что ширина w значительно больше диаметра корда d, что значительно снижает максимальное давление каната. Если же в пазах под обычный канат сделаны насечки, максимальное давление каната вырастает еще больше и тогда относительное снижение максимального давления каната при использовании работающего на растяжение элемента плоской формы оказывается еще более значительным. Другим преимуществом использования работающего на растяжение элемента согласно настоящему изобретению является то, что толщина t1 работающего на растяжение элемента может быть много меньше, чем диаметр d круглых канатов равной грузоподъемности. Благодаря этому увеличивается гибкость работающего на растяжение элемента по сравнению с обычными канатами.
Несмотря на то что изобретение было описано и проиллюстрировано на примерах его выполнения, специалисты должны понимать, что в нем могут быть сделаны различные изменения, исключения и добавления без изменения существа изобретения и его объема притязаний.
Изобретение относится к лифтам. Работающий на растяжение элемент имеет коэффициент формы больше единицы, определяемый как отношение ширины работающего на растяжение элемента к его толщине. В конкретном варианте выполнения работающий на растяжение элемент содержит группу отдельных несущих нагрузку тросов, заключенных внутри общего слоя покрытия. Слой покрытия разделяет отдельные тросы и определяет поверхность сцепления с приводным шкивом. Тяговый привод представляет собой привод, в котором в качестве каната используют канат по настоящему изобретению. Изобретение позволяет уменьшить максимальное давление каната и повысить его гибкость по сравнению с обычными канатами лифтов. В результате совместно с такими работающими на растяжение элементами можно использовать шкивы меньшего размера. 4 с. и 49 з.п.ф-лы, 12 ил.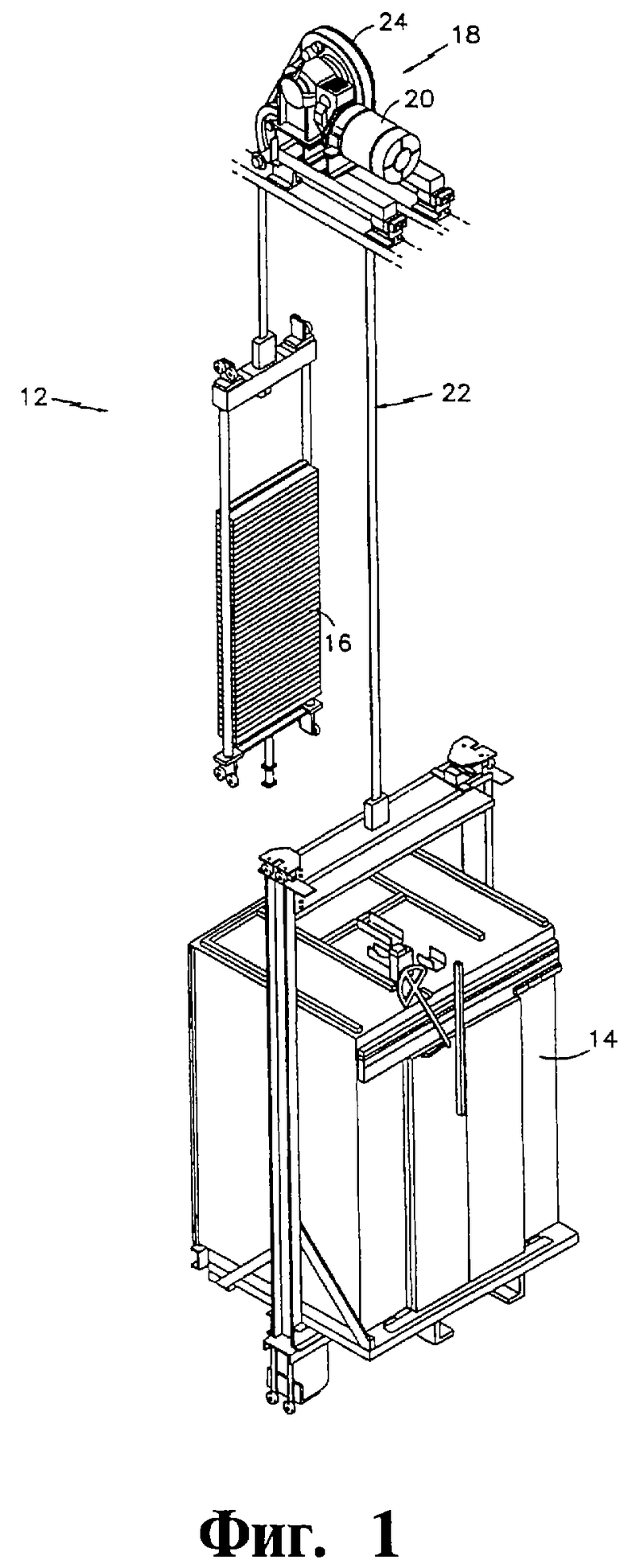
Рmах= 2F/D•w,
где F - максимальная растягивающая сила в работающем на растяжение элементе;
D - диаметр канатоведущего шкива.
| Стенд для испытания тормозной системы транспортного средства | 1983 |
|
SU1164115A1 |
| US 5112933 А, 12.05.1992 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Способ прокатки полос | 1981 |
|
SU1362514A1 |
