Область техники, к которой относится изобретение
Данное изобретение относится к контролю закрытых конструкций, в частности лифтовых шахт, в частности к способам, устройствам и системам для осуществления такого контроля.
Уровень техники
Использование направляющих продольной формы в качестве несущих и направляющих элементов для лифтовых кабин хорошо известно в данной области техники. В лифтовых системах обычно применяются две направляющие, установленные с противоположных сторон кабины и проходящие вдоль всей длины шахты. Кабина, обычно подвешиваемая на стальных тросах или ремнях, установленных в верхней части шахты, или на гидравлическом поршне, установленном на дне шахты, движется вдоль направляющих при перемещении вдоль шахты. Даже незначительные деформации элементов направляющих или зазоры между сегментами направляющих могут привести к возникновению раскачиваний или вибраций кабины, перемещающейся в шахте.
Правильность выравнивания направляющих в шахте, предотвращающая возникновение неточностей, в большой степени зависит от величин отклонений от вертикали стен шахты, к которым крепятся направляющие. Контроль шахт при установке новых и модернизации существующих лифтовых систем является трудоемкой, требующей ручного труда дорогостоящей операцией. Контроль шахт обычно производится вручную путем: (а) установки вертикальной линии отсчета или отвеса, такого как веревка или трос с грузом, спускаемого из верхней части шахты; и (б) ручного измерения горизонтального расстояния меду отвесом и каждой из четырех вертикальных стен шахты у лестничной площадки каждого этажа. Использование инструментов и способов контроля шахт известного уровня техники является трудоемким и дорогостоящим и, кроме того, сопровождается большими погрешностями.
В свете вышесказанного, целью настоящего изобретения является решение одной или нескольких вышеупомянутых проблем, которые оказывают влияние на лифтовые системы.
Раскрытие изобретения
Один из вариантов изобретения описывает устройство контроля закрытой конструкции, включающее платформу, установленную с возможностью продольного перемещения через конструкцию, по меньшей мере один первый дистанционный датчик измерения бокового расстояния между точкой на платформе и стенкой конструкции, соединенный с платформой, по меньшей мере один второй дистанционный датчик измерения продольного расстояния между точкой на платформе и первым концом конструкции, соединенный с платформой, и механизм перемещения платформы по существу продольно внутри конструкции. Устройство может дополнительно содержать электронный блок управления, установленный на платформе и связанный с первым и вторым датчиками с возможностью хранения их данных. Электронный блок управления может содержать подблок передачи данных удаленному второму электронному блоку. Механизм перемещения может содержать двигатель, первый шкив, соединенный с двигателем с возможностью привода от него и с первым концом конструкции, второй шкив, соединенный со вторым концом конструкции, и тяговый элемент, соединенный с первым и вторым шкивами и платформой. Также устройство может дополнительно содержать противовес, соединенный с платформой, а платформа может быть снабжена направляющим отверстием, при этом противовес установлен напротив направляющего отверстия, а тяговый элемент расположен проходящим через направляющее отверстие. Противовес может быть выполнен с возможностью уменьшения напряжений в тяговом элементе, создаваемых платформой, при прохождении тягового элемента через направляющее отверстие. Устройство также может дополнительно включать систему оптического выравнивания по заданной отсчетной оптической продольной линии и ее по существу перпендикулярности к плоскости, уровенной по отношению к боковым поверхностям конструкции. Система оптического выравнивания может содержать по меньшей мере одну регулирующую передающую и принимающую пару, имеющую передатчик создания луча в плоскости, по существу перпендикулярной к плоскости, уровенной по отношению к боковым поверхностям конструкции, и приемник, причем или передатчик, или приемник установлены на первом конце конструкции, или, наоборот, или передатчик, или приемник установлены на втором конце конструкции или на платформе. Первый и второй датчики могут быть выбраны из группы, включающей лазерные и ультразвуковые датчики расстояний.
Еще один вариант изобретения описывает систему контроля состояния лифтовой шахты, включающую шахту, электронное устройство измерения по меньшей мере одного расстояния между точкой на устройстве измерения и стенами шахты в по меньшей мере одном продольном положении устройства измерения в шахте и механизм перемещения устройства измерения вдоль шахты. Устройство измерения может содержать платформу, соединенную с механизмом перемещения с возможностью ее привода, по меньшей мере, один первый дистанционный датчик измерения бокового расстояния между по меньшей мере одной соответствующей точкой на платформе и стеной шахты в по меньшей мере одном положении платформы вдоль длины шахты, соединенный с платформой, и по меньшей мере один второй дистанционный датчик измерения продольного расстояния платформы от конца шахты, соединенный с платформой. Система может дополнительно содержать электронный блок управления, соединенный с платформой и связанный с первым и вторым датчиками с возможностью хранения их данных. Механизм перемещения может содержать двигатель, первый шкив, соединенный с двигателем с возможностью привода от него и с первым концом шахты, второй шкив, соединенный со вторым концом шахты, и тяговый элемент, соединенный с первым и вторым шкивами и электронным устройством измерения. Также система может дополнительно содержать противовес, соединенный с устройством измерения, а устройство измерения может быть снабжено направляющим отверстием, при этом противовес установлен напротив направляющего отверстия, а тяговый элемент расположен проходящим через направляющее отверстие.
Еще один вариант изобретения - способ контроля лифтовой шахты, включающий измерение посредством электронного устройства измерения по меньшей мере одного бокового расстояния между продольной заданной отсчетной осью шахты и стенами шахты в первом положении по длине продольной заданной отсчетной оси, последующее перемещение устройства измерения во второе положение вдоль продольной заданной отсчетной оси шахты, после чего измерение посредством устройства измерения по меньшей мере одного бокового расстояния между продольной заданной отсчетной осью шахты и стенами шахты во втором положении и обеспечение на выходе данных, основанных на измеренных боковых расстояниях. Заданная отсчетная ось по существу может быть перпендикулярна по меньшей мере одному, или плоскости первого конца, или плоскости второго конца шахты. Данные, основанные на измеренных боковых расстояниях, могут сохранять в виде, пригодном для считывания компьютером. Также данные, основанные на измеренных боковых расстояниях, могут передавать на удаленное второе электронное устройство. Удаленное электронное устройство может быть выбрано из группы электронных устройств, включающей принтер, монитор и компьютер. Измеренное боковое расстояние по существу может быть перпендикулярно продольной заданной отсчетной оси. Также дополнительно могут ассоциировать по меньшей мере одно измеренное боковое расстояние с первым и вторым положениями.
Следует понимать, что нижеследующее общее описание и дальнейшее подробное описание приводятся исключительно в качестве поясняющих примеров и не накладывают ограничений на заявляемое изобретение.
Краткое описание чертежей
Преимущества настоящего изобретения разъясняются в нижеследующем описании, прилагаемой формуле изобретения и примерах вариантов осуществления изобретения, показанных на фигурах, краткое описание которых приводится далее.
Фиг.1 - вид спереди шахты, включающей вариант осуществления системы контроля состояния шахты в соответствии с изобретением.
Фиг.2 - общий вид электронного устройства измерения, соответствующего варианту осуществления системы контроля состояния шахты, показанному на Фиг.1.
Фиг.3 и 4 - соответственно виды сбоку и сверху шахты, иллюстрирующие контроль расстояний, проводимый электронным устройством измерения, показанным на Фиг.1 и 2.
Фиг.5 - общий вид альтернативного варианта осуществления электронного устройства измерения согласно настоящему изобретению.
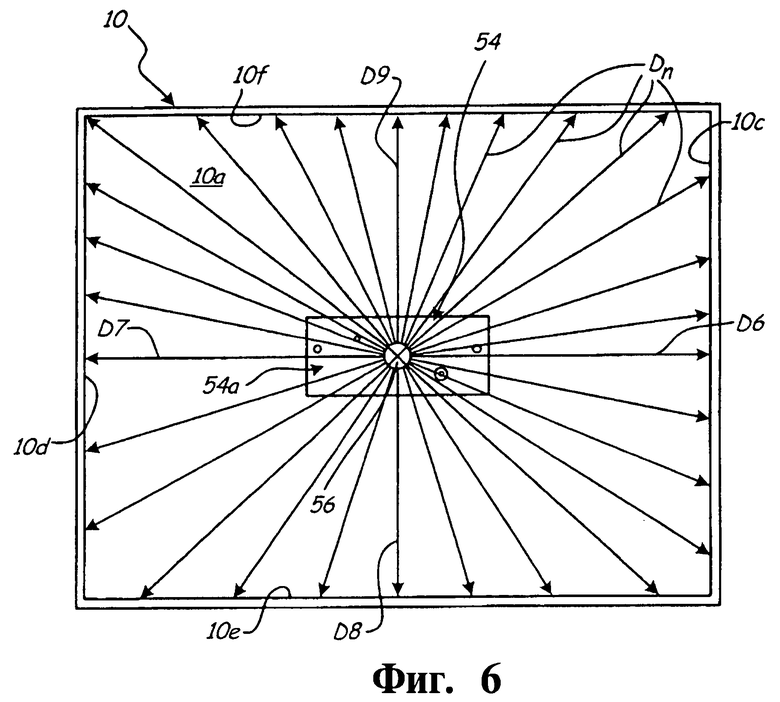
Фиг.6 - вид сверху шахты, на котором показан контроль расстояний электронным устройством измерения, показанным на Фиг.5.
Осуществление изобретения
На Фиг.1 показан вид спереди закрытой конструкции в форме лифтовой шахты 10 и устройство 20 контроля шахты в соответствии с изобретением. Устройство 20 контроля шахты включает механизм 22 перемещения, платформу, такую как электронное устройство 24 измерения, электронный блок 26 управления и систему 28 оптического выравнивания. На Фиг.1 электронное устройство 24 измерения может быть связано с механизмом 22 перемещения, конструкция которого может обеспечивать перемещение электронного устройства 24 измерения в шахте 10. При перемещении устройства 24 по шахте 10 его конструкция может обеспечивать измерение расстояний, таких как поперечное расстояние D1 между стороной 24с устройства 24 и стенкой 10с шахты 10 и продольное расстояние D2 между нижней стороной 24b устройства 24 и дном 10а шахты. Электронный блок 26 управления может подключаться к электронному устройству 24 измерения и обеспечивать хранение и/или передачу замеренных данных, собранных электронным устройством 24 измерения в процессе перемещения устройства 24 в шахте 10. Электронный блок 26 управления может, например, представлять собой серийно выпускаемую интегральную микросхему, включающую процессор, цифровое запоминающее устройство и проводные или беспроводные соединительные элементы. Электронный блок 26 управления может подсоединяться (проводным или беспроводным способом) к второму электронному блоку 26а, такому как принтер, монитор или компьютер для выдачи данных, собранных электронным измерительным устройством 24 и переданных подблоком передачи данных электронного блока 26 управления. Система 28 оптического выравнивания может обеспечивать создание оптической продольной линии, по существу перпендикулярной к плоскости, уровенной по отношению к боковой поверхности 32а, установленной, например, у дна 10а шахты 10.
На Фиг.1 механизм 22 перемещения может включать электродвигатель 30, приводящий во вращение соединенный с ним первый шкив, станину 32 электродвигателя, второй шкив 34, станину 36 шкива, тяговый элемент, такой как трос 38, натяжной элемент 40, такой как пружина, и источник 42 питания, такой как аккумулятор. Натяжной элемент 40 может изменять натяжение троса 38 и может устанавливаться между одним концом троса 38 и электронным устройством 24 измерения, например между тросом 38 и верхней частью 24а устройства 24. Электродвигатель 30 может устанавливаться на станине 32 электродвигателя, данная станина 32 может крепиться, например, к дну 10а шахты 10. Шкив 34 может устанавливаться на станине 36 шкива, станина 36 шкива может быть связана, например, с потолком 10b шахты 10. Один конец троса 38 может крепиться к натяжному элементу 40 в верхней части 24а электронного устройства 24 измерения, в этом случае трос 38 может наматываться на шкив 34 таким образом, что сторона 38а троса 38 проходит вниз через направляющее трос отверстие 44 в электронном устройстве 24 измерения. После прохождения через отверстие 44 трос 38 может наматываться на шкив электродвигателя 30 и заканчиваться у дна 24b электронного устройства 24 измерения.
Электродвигатель 30 может получать питание, например, от источника 42 питания, который может быть расположен внутри или снаружи шахты 10. Трос 38, намотанный на шкив двигателя 30 и шкив 34, после создания в нем соответствующего натяжения при помощи натяжного элемента 40 создает натяжную систему, посредством которой вращательное перемещение вала электродвигателя 30 и шкива 34, которые соединены через трос 38, преобразуется в поступательное перемещение троса 38 вверх и вниз вдоль шахты в зависимости от направления вращения вала электродвигателя 30. Электронное устройство 24 измерения связано с механизмом 22 перемещения посредством прикрепления троса 38 к верхней части 24а и нижней части 24b электронного устройства 24 измерения. Таким образом, перемещение троса 38, вызываемое вращением вала электродвигателя 30 (запитанного от источника 42 питания), вызывает перемещение устройства 24 вдоль шахты 10.
Система 28 оптического выравнивания, показанная на Фиг.1, может включать, например, передатчики 28а и приемники 28b, установленные, например, на станине 32 электродвигателя и станине 36 шкива у дна 10а и потолка 10b шахты 10. Передатчики 28а и приемники 28b могут представлять собой, например, лучевые (например, лазерные) или волновые (например, радарные) передатчики/приемники или другие передатчики/приемники; всюду далее все различные типы передатчиков/приемников обозначаются общим термином "лучевые" передатчики/приемники, а передаваемый/принимаемый сигнал обозначается как "лучевой". В частности, система 28 оптического выравнивания может обеспечивать генерацию лучей 28с между соответствующим парами передатчиков 28а и приемников 28b. Лучи 28с, передаваемые передатчиками 28а и принимаемые приемниками 28b, могут располагаться в единой плоскости, по существу перпендикулярной к плоскости, уровенной по отношению к боковой поверхности, расположенной, например, у дна 10а шахты. Например, верхняя часть станины 32 электродвигателя может иметь по существу горизонтальную поверхность 32а, и передатчики 28а могут быть установлены таким образом, чтобы генерируемые ими лучи 28с были по существу перпендикулярны горизонтальной поверхности 32а. Лучи 28с могут выполнять функцию создания оптической продольной отсчетной линии, по существу перпендикулярной горизонтальной поверхности 32а, или, другими словами, лучи 28с могут выполнять функцию оптических отвесов, представляющих по существу вертикальные отсчетные линии внутри шахты 10.
Система 28 оптического выравнивания и электронное устройство 24 измерения могут устанавливаться таким образом, чтобы лучи 28с проходили через направляющие отверстия 46 в электронном устройстве 24 измерения при правильной установке электронного устройства 24 измерения в шахте 10 для проведения контроля, такого как контроль расстояния D1, в направлении, по существу перпендикулярном лучам 28с и, следовательно, по существу параллельном горизонтальной поверхности 32а. В случае изменения ориентации электронного устройства 24 измерения, например, за счет поворота или поперечного перемещения внутри шахты 10, лучи 28с могут прерываться, сигнализируя таким образом о том, что электронное устройство 24 измерения неправильно ориентировано в шахте 10 для контроля.
Система 28 оптического выравнивания может включать электронный блок управления, подключенный к передатчикам 28а и приемникам 28b и обеспечивающий, например, выдачу предупреждающего сигнала или прерывание контроля в случае разрыва лучей 28с за счет неправильного ориентирования электронного устройства 24 измерения. В другом варианте осуществления изобретения система 28 оптического выравнивания может включать передатчики 28а, как это показано на Фиг.1, однако приемники 28b могут быть установлены на нижней поверхности 24b электронного устройства 24 измерения. Например, приемники 28 могут включать массив фотоэлементов, установленный на нижней поверхности 24b электронного устройства измерения и обеспечивающий прием лучей (28с), передаваемых передатчиками 28а, и регистрацию изменений в ориентации электронного устройства измерения в шахте 10.
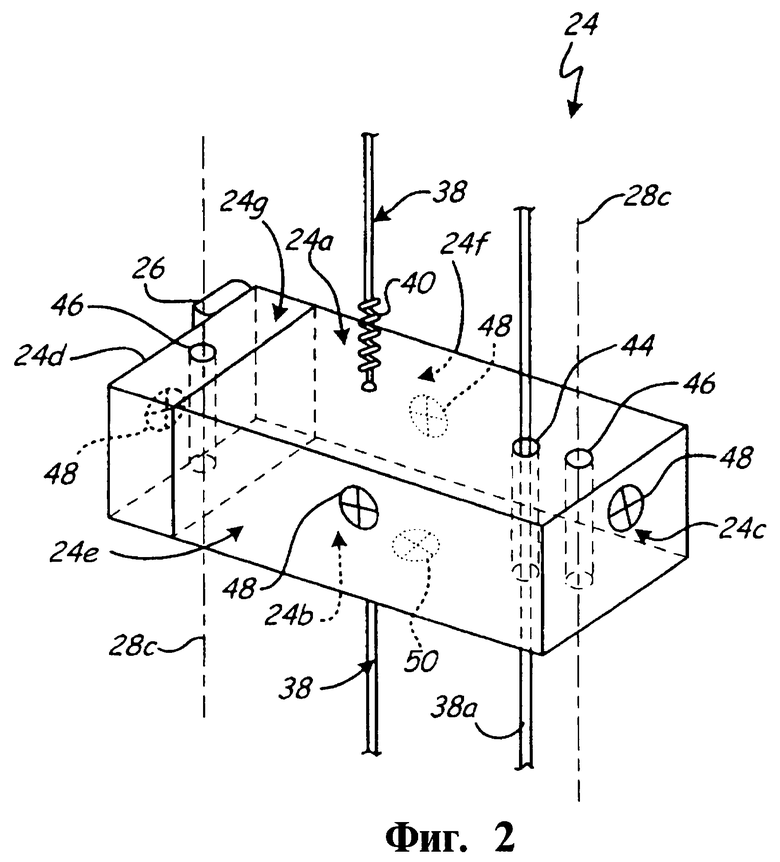
Как показано на Фиг.1 и на увеличенном общем виде устройства 24, приведенном на Фиг.2, электронное устройство 24 измерения может включать направляющее трос отверстие 44, направляющие отверстия 46, дистанционные датчики 48 измерения боковых расстояний и дистанционный датчик 50 измерения продольного расстояния. Как описано выше, направляющее трос отверстие 44 может обеспечивать прием одной стороны 38а троса 38, которая может выполнять функцию направляющей при перемещении электронного устройства 24 измерения в шахте 10. Электронное устройство 24 измерения также может включать противовес 24g, установленный у стороны 24d напротив направляющего отверстия 44 и обеспечивающий снижение напряжения на трос 38, проходящий через направляющее отверстие 44. Направляющие отверстия 46 могут обеспечивать неразрывную передачу лучей 28с при правильной установке электронного устройства 24 измерения в шахте 10 для проведения измерений. Дистанционные датчики 48 измерения бокового расстояния могут устанавливаться на сторонах 24с, 24d, 24е, 24f электронного устройства 24 измерения. Дистанционный датчик 50 измерения продольного расстояния может устанавливаться на нижней стороне 24b устройства 24. В другом варианте осуществления изобретения электронное устройство 24 измерения может включать более одного дистанционного датчика измерения продольного расстояния и по меньшей мере один датчик может быть установлен на верхней поверхности 24а электронного устройства 24 измерения.
Дистанционные датчики 48 измерения бокового расстояния могут обеспечивать измерение боковых расстояний между сторонами 24с, 24d, 24е, 24f электронного устройства 24 измерения и соответствующими стенами 10с и 10d, 10e, 10f, показанными на Фиг.4, шахты 10 в различных положениях электронного устройства 24 измерения по длине шахты 10. На Фиг.1 дистанционные датчики измерения бокового расстояния могут обеспечивать контроль, например, расстояния D1 между стороной 24с электронного устройства измерения и стеной 10с шахты 10 в различных положениях устройства 24 по длине шахты 10. Положение электронного устройства 24 измерения по длине шахты 10 может определяться при помощи дистанционного датчика 50 измерения продольных расстояний, таких как расстояние D2 между нижней поверхностью 24b электронного устройства 24 измерения и дном 10а шахты 10.
Дистанционные датчики 48, 50 измерения боковых и продольных расстояний могут, например, представлять собой выпускаемые серийно электронные датчики, такие как лазерные или ультразвуковые датчики расстояний. Лазерные и ультразвуковые датчики расстояний измеряют расстояния между датчиком и отражающим телом, например, путем вычисления расстояния на основании измерения времени, необходимого для передачи сигнала, светового или звукового, к телу и приема датчиком сигнала, отраженного от тела. В лазерных датчиках могут использоваться триангуляционные или интерферометрические способы измерения относительно малых расстояний, например расстояний, меньших чем два фута (61 см). Триангуляция обычно включает проецирование луча видимого лазерного света на тело, регистрацию света, отраженного от тела при помощи цифровой камеры, расположенной под углом, и вычисления расстояния до тела по точечному изображению, зафиксированному цифровой камерой. Лазерные датчики, в которых используются интерферометрические способы, могут проводить измерения путем вычисления расстояния до отражающего тела по замеру относительного сдвига фаз двух лучей, последовательно посланных к телу и отраженных от него.
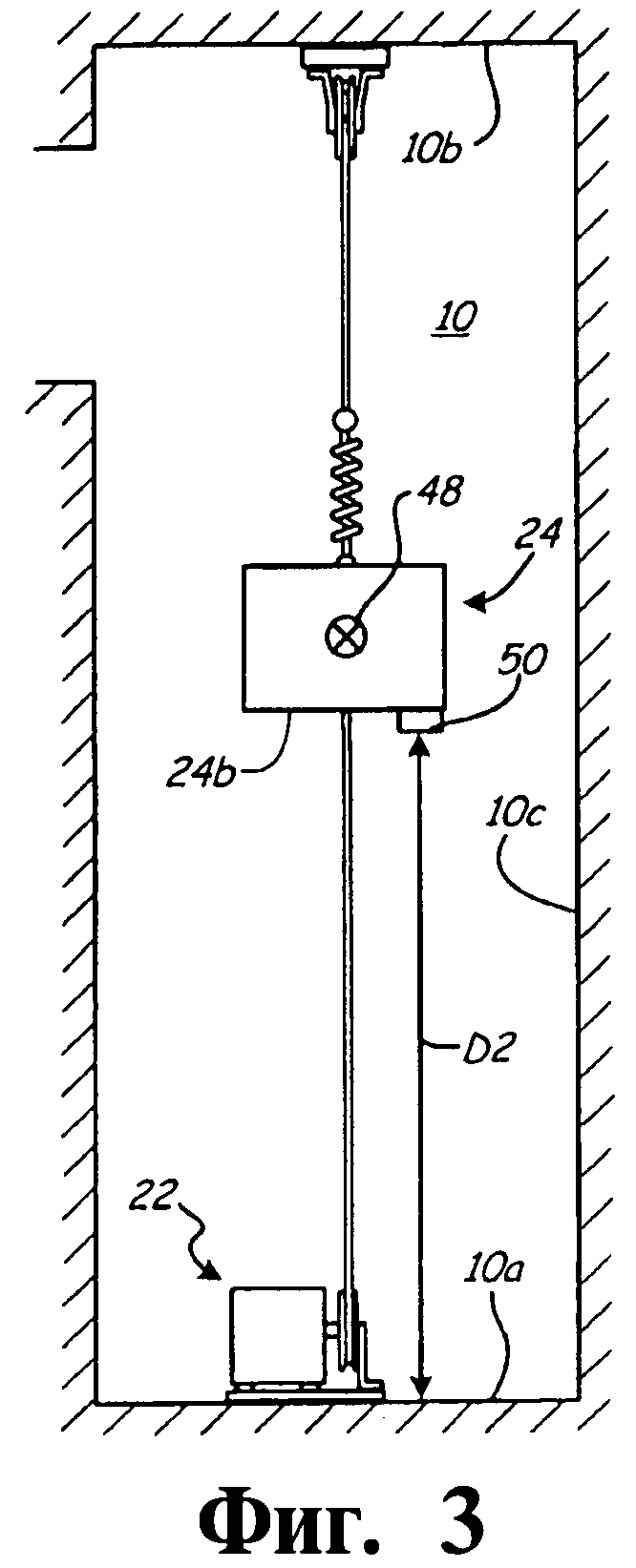
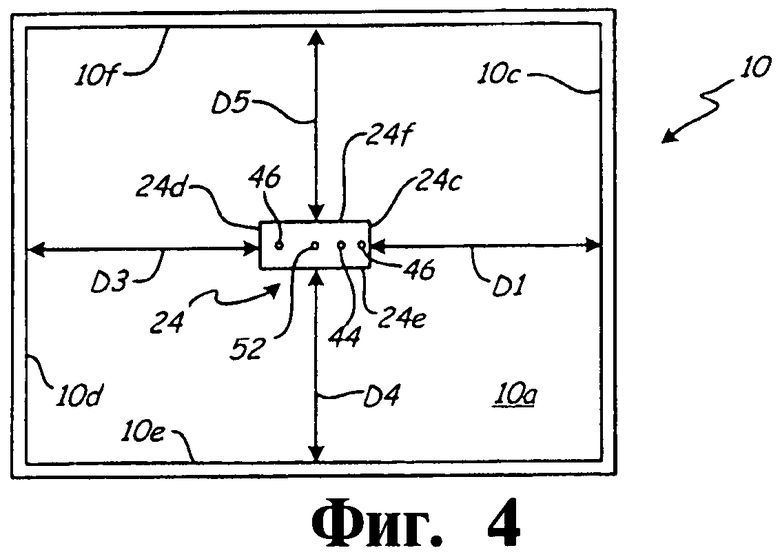
На Фиг.3 и 4 показан контроль боковых и продольных расстояний при помощи электронного устройства 24 измерения, показанного на Фиг.1 и 2. На Фиг.3 устройство 24 установлено на механизме 22 перемещения внутри шахты 10. Продольное положение электронного устройства 24 измерения может быть определено дистанционным датчиком 50 измерения продольного расстояния, измеряющим, например, расстояние D2 между нижней поверхностью 24b электронного устройства 24 измерения и дном 10а шахты 10. На Фиг.4 электронное устройство 24 измерения, находящееся в том же продольном положении, что и на Фиг.3, или в другом продольном положении, может контролировать боковые расстояния между электронным устройством 24 измерения и четырьмя стенами шахты 10. Например, дистанционный датчик 48, установленный на стороне 24с электронного устройства 24 измерения, может контролировать расстояние D1 между устройством 24 и стеной 10с шахты 10. Дистанционный датчик 48, установленный на стороне 24d электронного устройства 24 измерения, может контролировать боковое расстояние D3 между электронным измерительным устройством 24 и стеной 10d шахты 10. Дистанционный датчик 48, установленный на стороне 24е электронного устройства 24 измерения, может контролировать боковое расстояние D4 между устройством 24 и стеной 10е шахты 10. Дистанционный датчик 48, установленный на стороне 24f устройства 24, может контролировать расстояние D5 между электронным устройством 24 измерения и стеной 10f шахты 10. Как показано на Фиг.1 и 4, электронное устройство 24 измерения расположено по существу вдоль вертикальной оси 52 шахты 10.
Система 20 контроля состояния шахты, показанная на Фиг.1-4, может проводить контроль шахты 10 при перемещении электронного устройства 24 измерения посредством механизма 22 перемещения по шахте 10, при этом электронное устройство 24 измерения проводит контроль боковых расстояний между устройством 24 и стенами шахты 10 посредством дистанционных датчиков 48 боковых расстояний в различных положениях электронного устройства 24 измерения вдоль шахты 10, определяемых дистанционным датчиком 50 измерения продольного расстояния. Электронный блок 26 управления может обеспечивать хранение и передачу замеренных данных, собранных электронным устройством 24 измерения. Система 28 оптического выравнивания может обеспечивать создание оптической заданной отсчетной продольной линии, по существу перпендикулярной плоской поверхности станины 32 электродвигателя, данная оптическая продольная отсчетная линия может обеспечивать контроль за правильностью ориентации электронного устройства 24 измерения в шахте 10 для проведения контроля.
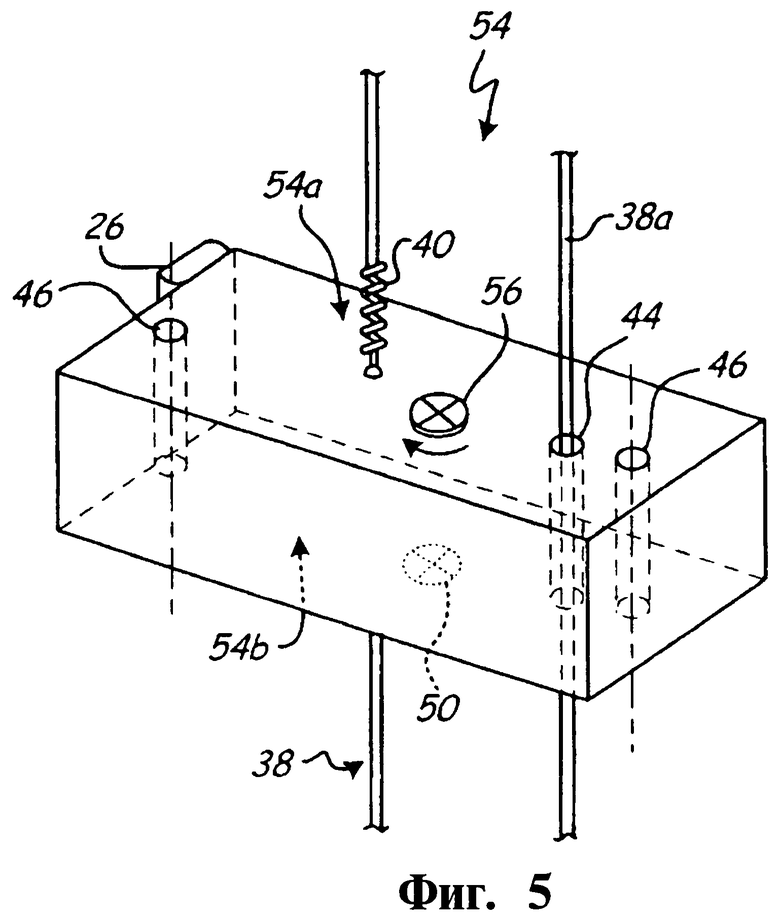
На Фиг.5 показан общий вид альтернативного варианта осуществления электронного устройства 54 измерения. Данное электронное устройство 54 измерения снабжено направляющим трос отверстием 44, направляющим отверстием 46, поворотным дистанционным датчиком 56 измерения боковых расстояний и дистанционным датчиком 50 измерения продольного расстояния. В электронном устройстве 54 измерения используется один дистанционный датчик 56 измерения бокового расстояния и дистанционный датчик 50 измерения продольного расстояния. В электронном устройстве 54 измерения используется один дистанционный датчик 56 измерения бокового расстояния, обеспечивающий измерение всех четырех расстояний между устройством 54 и стенами 10с, 10d, 10e, 10f шахты 10. Дистанционный датчик 56 измерения бокового расстояния может быть связан с электронным устройством 54 измерения, например, около центральной части верхней поверхности 54а устройства 54 и может быть установлен с возможностью вращения относительно электронного устройства 54 измерения и шахты 10. В одном или в группе положений устройства 54 вдоль длины шахты датчик 56 измерения бокового расстояния может обеспечивать контроль группы боковых расстояний между электронным устройством 54 измерения и стенами шахты 10 в процессе вращения датчика 56. Таким образом датчик 56 измерения бокового расстояния может контролировать боковые расстояния между электронным устройством 54 измерения и шахтой практически в секторе 360 градусов; единственными положениями, в которых не возможны измерения, являются положения, в которых луч (если, например, датчик 56 является лазерным, радарным или другим излучателем), излучаемый датчиком 56, преждевременно отражается либо от натяжного элемента 40, либо от троса 38. Электронное устройство 54 измерения может определять соответствующие боковые расстояния, например, путем отбора наименьших расстояний между устройством 54 и четырьмя стенами 10с, 10d, 10e, 10f шахты 10.
На Фиг.6 показан контроль при помощи электронного устройства 54 измерения, показанного на Фиг.5. На Фиг.6 электронное устройство 54 измерения в заданных положениях по длине шахты 10 может контролировать боковые расстояния между электронным устройством 54 измерения и четырьмя стенами шахты 10. Например, дистанционный датчик 56, установленный на верхней поверхности 54а устройства 54, может измерять группу боковых расстояний Dn между электронным устройством 54 измерения и четырьмя стенами 10с, 10d, 10e, 10f шахты 10 при повороте датчика 56 на угол 360 (относительно устройства 54 и шахты 10). Электронное устройство 54 измерения может обеспечивать контроль соответствующих боковых расстояний из группы расстояний Dn посредством, например, отбора наименьших расстояний D6, D7, D8, D9 между электронным устройством 54 измерения и соответствующими четырьмя стенами 10с, 10d, 10e, 10f шахты 10. Электронное устройство 54 измерения может по существу располагаться в центре шахты таким образом, чтобы, например, дистанционный датчик 56 находился на вертикальной оси 52 шахты 10 (см., например, Фиг.1).
Варианты осуществления настоящего изобретения также включают способ контроля шахты, который включает измерение группы расстояний между продольной заданной отсчетной осью шахты и стенами шахты в по меньшей мере одном положении по длине продольной заданной отсчетной оси и обеспечение на выходе данных, основанных на измеренных боковых расстояниях. Продольная заданная отсчетная ось, от которой производится контроль боковых расстояний до стен шахты, может быть по существу перпендикулярна, по меньшей мере, одному, или плоскости первого конца, или плоскости второго конца шахты, а замеряемые боковые расстояния могут быть по существу перпендикулярны продольной отсчетной оси. Кроме того, продольная отсчетная ось может, например, проходить вдоль боковой стороны электронного устройства измерения или через центральную часть данного электронного устройства измерения. В дополнительном или альтернативном варианте продольная отсчетная ось может представлять собой вертикальную ось 52 шахты. Обеспечение данными на выходе на основе измеренных боковых и продольных расстояний может, например, включать хранение расстояний в виде, пригодном для считывания компьютером, и/или передачу расстояний на удаленное второе электронное устройство, такое как принтер, монитор или компьютер. Способы измерения шахты по изобретению могут также включать электронное измерение положений вдоль продольной отсчетной оси шахты и ассоциирование по меньшей мере одного замеренного бокового расстояния с каждым из положений вдоль продольной заданной отсчетной оси.
Варианты осуществления настоящего изобретения обладают рядом преимуществ в сравнении со способами контроля лифтовых шахт известного уровня техники. Способы и системы по изобретению обеспечивают автоматизированное средство контроля лифтовых шахт. Варианты осуществления настоящего изобретения включают электронные устройства измерения, предназначенные для перемещения в шахте и электронного контроля ключевых размеров шахты подлине шахты. Электронное устройство измерения оборудовано дистанционными датчиками расстояний, такими как лазерные или ультразвуковые датчики, которые обеспечивают эффективный и точный контроль расстояний и которые могут подключаться к электронному блоку управления, такому как интегральная схема, для автоматического сохранения и передачи замеренных расстояний. Способы и системы по изобретению одновременно снижают временные затраты и повышают точность контроля шахты, что в свою очередь существенно снижает затраты на проведение контроля при установке новых лифтов и модернизации существующих.
Вышеприведенное описание настоящего изобретения имеет исключительно иллюстративный характер и не ограничивает прилагаемую формулу изобретения каким-либо конкретным вариантом осуществления изобретения или группой вариантов осуществления изобретения. Так, хотя настоящее изобретение было описано в конкретных подробностях со ссылками на примеры вариантов осуществления, следует понимать, что для него возможно создание группы модификаций и изменений, не выходящих за пределы более широкого предполагаемого объема изобретения, изложенного в пунктах нижеследующей формулы изобретения.
Подробное описание и чертежи также следует рассматривать в качестве иллюстраций, не ограничивающих объем прилагаемой формулы изобретения.
В свете вышеприведенного описания настоящего изобретения любой специалист в данной области техники может предусмотреть другие варианты осуществления и модификации изобретения в рамках объема настоящего изобретения. Соответственно все модификации, которые могут быть созданы специалистом в данной области техники на основании настоящего описания в рамках объема настоящего изобретения, также включаются в данный документ в качестве дополнительных вариантов осуществления настоящего изобретения. Объем настоящего изобретения определяется в соответствии с нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ УСТАНОВКИ НАПРАВЛЯЮЩИХ РЕЛЬСОВ ЛИФТА В ЛИФТОВУЮ ШАХТУ | 2020 |
|
RU2748356C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА ЛИФТА | 1998 |
|
RU2196096C2 |
| ЛИФТ И СПОСОБ КОНТРОЛЯ ЭТОГО ЛИФТА | 2008 |
|
RU2448892C2 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| СИСТЕМА С НЕСКОЛЬКИМИ КАБИНАМИ В ШАХТЕ ЛИФТА | 2011 |
|
RU2577445C2 |
| СИСТЕМА С НЕСКОЛЬКИМИ КАБИНАМИ В ШАХТЕ ЛИФТА | 2011 |
|
RU2717398C2 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НЕЖЕЛАТЕЛЬНОГО ВЫХОДА КАБИНЫ ЛИФТА ИЗ НЕПОДВИЖНОГО СОСТОЯНИЯ | 2011 |
|
RU2587283C2 |
| ЛИФТОВАЯ КОНСТРУКЦИЯ И СПОСОБ ИЗГОТОВЛЕНИЯ ЛИФТА | 2010 |
|
RU2538742C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| КАЛИБРОВКА СИСТЕМЫ ОБНАРУЖЕНИЯ ИЗНОСА | 2012 |
|
RU2589443C2 |
Изобретение относится к области подъемников. При контроле замкнутого сооружения, продольном перемещении устройства измерения, измеряют боковые расстояния между продольной заданной отсчетной осью сооружения и стенами сооружения или между точкой на устройстве измерения и стенами сооружения в по меньшей мере одном продольном положении устройства измерения в сооружении. Достигается определение отклонения от вертикали стен сооружения. 3 н. и 24 з.п. ф-лы, 6 ил.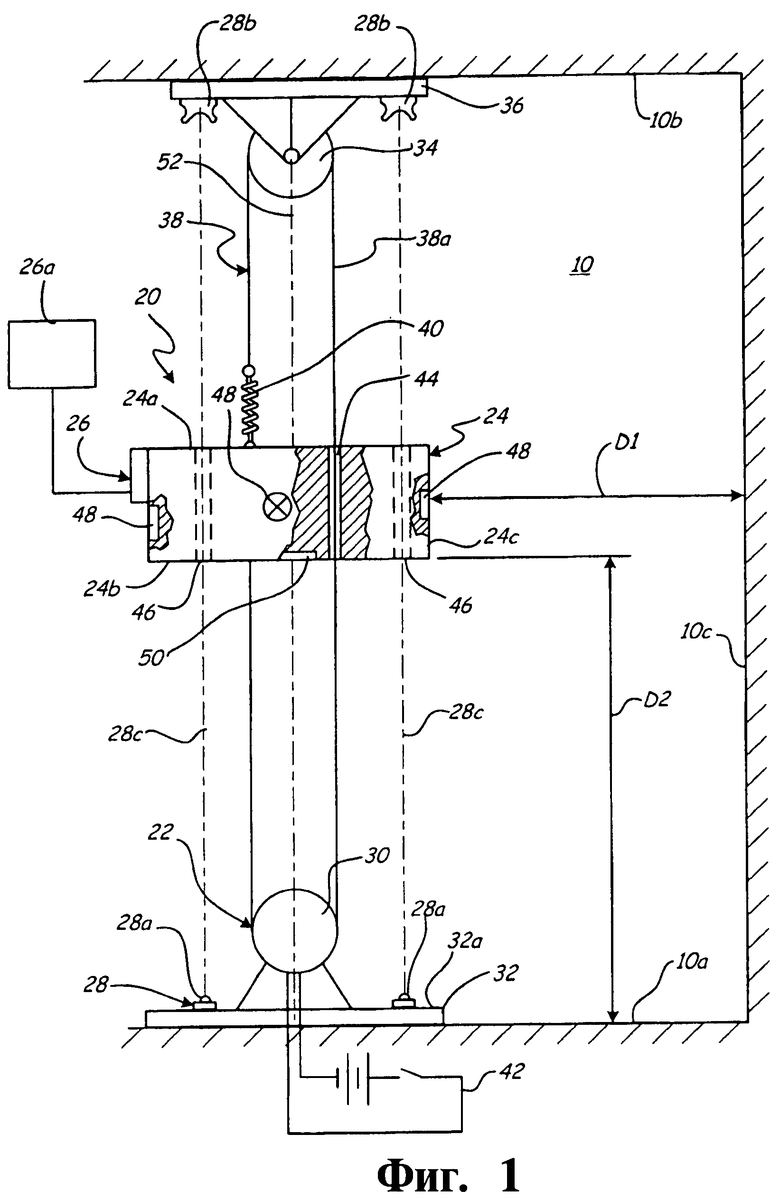
1. Устройство контроля замкнутого сооружения, включающее платформу, установленную с возможностью продольного перемещения через сооружение, по меньшей мере один первый дистанционный датчик измерения бокового расстояния между точкой на платформе и стенкой сооружения, соединенный с платформой, по меньшей мере один второй дистанционный датчик измерения продольного расстояния между точкой на платформе и первым концом сооружения, соединенный с платформой, и механизм перемещения платформы, по существу, продольно внутри сооружения.
2. Устройство по п.1, которое дополнительно содержит электронный блок управления, установленный на платформе и связанный с первым и вторым датчиками с возможностью хранения их данных.
3. Устройство по п.2, в котором электронный блок управления содержит подблок передачи данных удаленному второму электронному блоку.
4. Устройство по п.1, в котором механизм перемещения содержит электродвигатель, первый шкив, соединенный с электродвигателем с возможностью привода от него и с первым концом сооружения, второй шкив, соединенный со вторым концом сооружения, и тяговый элемент, соединенный с первым и вторым шкивами и платформой.
5. Устройство по п.4, которое дополнительно содержит противовес, соединенный с платформой, а платформа снабжена направляющим отверстием, при этом противовес установлен напротив направляющего отверстия, а тяговый элемент расположен проходящим через направляющее отверстие.
6. Устройство по п.5, в котором противовес выполнен с возможностью уменьшения напряжений в тяговом элементе, создаваемых платформой, при прохождении тягового элемента через направляющее отверстие.
7. Устройство по п.1, которое дополнительно включает систему оптического выравнивания по заданной отсчетной оптической продольной линии и ее, по существу, перпендикулярности к плоскости, уровенной по отношению к боковым поверхностям сооружения.
8. Устройство по п.7, в котором система оптического выравнивания содержит по меньшей мере одну регулирующую передающую и принимающую пару, имеющую передатчик создания луча в плоскости, по существу, перпендикулярной к плоскости, уровенной по отношению к боковым поверхностям сооружения, и приемник, причем или передатчик, или приемник установлены на первом конце сооружения, или, наоборот, или передатчик, или приемник установлены на втором конце сооружения или на платформе.
9. Устройство по п.1, в котором первый датчик является датчиком, выбранным из группы, включающей лазерные и ультразвуковые датчики расстояний.
10. Устройство по п.1, в котором второй датчик является датчиком, выбранным из группы, включающей лазерные и ультразвуковые датчики расстояний.
11. Система контроля состояния лифтовой шахты, включающая шахту, электронное устройство измерения по меньшей мере одного расстояния между точкой на устройстве измерения и стенами шахты в по меньшей мере одном продольном положении устройства измерения в шахте и механизм перемещения устройства измерения вдоль шахты.
12. Система по п.11, в которой устройство измерения содержит платформу, соединенную с механизмом перемещения с возможностью ее привода, по меньшей мере один первый дистанционный датчик измерения бокового расстояния между по меньшей мере одной соответствующей точкой на платформе и стеной шахты в по меньшей мере одном положении платформы вдоль длины шахты, соединенный с платформой, и по меньшей мере один второй дистанционный датчик измерения продольного расстояния платформы от конца шахты, соединенный с платформой.
13. Система по п.12, которая дополнительно содержит электронный блок управления, соединенный с платформой и связанный с первым и вторым датчиками с возможностью хранения их данных.
14. Система по п.12, в которой первый датчик является датчиком, выбранным из группы, включающей лазерные и ультразвуковые датчики расстояний.
15. Система по п.12, в которой второй датчик является датчиком, выбранным из группы, включающей лазерные и ультразвуковые датчики расстояний.
16. Система по п.11, в которой механизм перемещения содержит электродвигатель, первый шкив, соединенный с электродвигателем с возможностью привода от него и с первым концом шахты, второй шкив, соединенный со вторым концом шахты, и тяговый элемент, соединенный с первым и вторым шкивами и электронным устройством измерения.
17. Система по п.16, которая дополнительно содержит противовес, соединенный с устройством измерения, а устройство измерения снабжено направляющим отверстием, при этом противовес установлен напротив направляющего отверстия, а тяговый элемент расположен проходящим через направляющее отверстие.
18. Система по п.17, в которой противовес выполнен с возможностью уменьшения напряжений в тяговом элементе при прохождении тягового элемента через направляющее отверстие.
19. Система по п.12, которая дополнительно включает систему оптического выравнивания по заданной отсчетной оптической продольной линии и ее, по существу, перпендикулярности к плоскости, уровенной по отношению к боковым поверхностям.
20. Система по п.19, в которой система оптического выравнивания содержит по меньшей мере одну регулирующую передающую и принимающую пару, имеющую передатчик создания луча в плоскости, по существу, перпендикулярной к плоскости, уровенной по отношению к боковым поверхностям, и приемник, причем или передатчик или приемник установлены на первом конце шахты, или, наоборот, или передатчик или приемник установлены на втором конце шахты или на платформе.
21. Способ контроля лифтовой шахты, включающий измерение посредством электронного устройства измерения по меньшей мере одного бокового расстояния между продольной заданной отсчетной осью шахты и стенами шахты в первом положении по длине продольной заданной отсчетной оси, последующее перемещение устройства измерения во второе положение вдоль продольной заданной отсчетной оси шахты, после чего измерение посредством устройства измерения по меньшей мере одного бокового расстояния между продольной заданной отсчетной осью шахты и стенами шахты во втором положении и обеспечение на выходе данных, основанных на измеренных боковых расстояниях.
22. Способ по п.21, в котором заданная отсчетная ось, по существу, перпендикулярна по меньшей мере одному, или плоскости первого конца, или плоскости второго конца шахты.
23. Способ по п.21, в котором данные, основанные на измеренных боковых расстояниях, сохраняют в виде, пригодном для считывания компьютером.
24. Способ по п.21, в котором данные, основанные на измеренных боковых расстояниях, передают на удаленное второе электронное устройство.
25. Способ по п.24, в котором удаленное электронное устройство выбирают из группы электронных устройств, включающей принтер, монитор и компьютер.
26. Способ по п.21, в котором измеренное боковое расстояние, по существу, перпендикулярно продольной заданной отсчетной оси.
27. Способ по п.21, в котором дополнительно ассоциируют по меньшей мере одно измеренное боковое расстояние с первым и вторым положениями.
| JP 8324911 А, 10.12.1996 | |||
| JP 2007119102 A, 17.05.2007 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА ЛИФТА | 1998 |
|
RU2196096C2 |

