Область техники, к которой относится изобретение
Настоящее изобретение относится к подъмно-транспортному оборудованию, в частности к тормозным системам этого оборудования, которые содержат датчики, определяющие нагрузку на тормоз подъемной машины.
Уровень техники
Широко известны и используются подъмные системы. Как правило, они включают в себя кабину подъемника, которая перемещается между площадками этажей в здании, например, для перевозки пассажиров или груза между разными этажами здания. Кабина подвешивается на канатах или ремнях, которые перемещают ее в шахте посредством подъмной машины с двигателем.
Подъемная машина содержит вал, который вращается от двигателя в зависимости от выбранной команды (сигнала). На валу подъемной машины обычно закрепляется шкив, который вращается вместе с валом. Канаты или ремни движутся по шкиву таким образом, что при вращении шкива подъемной машиной в одном направлении кабина подъемника опускается, а при вращении шкива в другом направлении кабина подъемника поднимается. Подъемная машина также содержит тормоз, который взаимодействует с диском или фланцем, вращающимся вместе с валом подъемной машины, удерживая в станционарном положении вал подъемной машины и шкив, когда кабина останавливается на заданной площадке.
Обычные подъемные системы включают в себя контроллер, в который поступает информация о загрузке кабины по весу и который управляет подъемной машиной на основе этой информации. Информация о весе обычно поступает в контроллер от устройства замера нагрузки, установленном в полу кабины. Недостатком такой схемы является то, что устройства измерения нагрузки, установленные в полу, зачастую не дают достаточно точных данных о весе. Например, когда нагрузка кабины мала, установленные в полу устройства измерения нагрузки не могут достоверно различить собственный вес кабины и небольшую нагрузку. Кроме того, если груз расположен не по центру кабины, информация о весе получается неточной. Для повышения точности могут быть использованы дополнительные устройства измерения нагрузки, однако стоимость и сложность обслуживания подъемной системы растут с каждым дополнительным устройством. На вносимые в конструкцию подъемника изменения, касающиеся, например, грузов противовеса или модификации кабины, датчики в полу кабины не реагируют.
В других подъемных системах используется тормоз подъемника для измерения веса в кабине. Обычно, в таких системах используется динамометрический датчик, включенный через рычаг между тормозом и полом машинного отделения лифта. Вращающий (крутящий или изгибающий) момент, возникающий при включении тормоза, создает нагрузку на динамометрический датчик. Недостатком таких систем является то, что для них требуется много места в машинном отделении, их точность ухудшается за счет добавления веса тормоза или силового механизма к показаниям динамометрического датчика, а также высокая стоимость. Тормоза подъемника и динамометрические датчики в таких схемах также могут плохо работать при высоких вращающих моментах, что может приводить к возникновению нежелательных состояний подъемной системы. Одно из предлагаемых решений состоит в том, чтобы увеличить размер динамометрических датчиков и сделать их более прочными, однако это может привести к потере чувствительности при определении веса в кабине.
Современный уровень техники требует решения задачи создания прочной, малогабаритной и чувствительной системы для получения информации о весе кабины лифта. В настоящем изобретении предлагается решение этой задачи, отличающееся улучшенными характеристиками по сравнению с известными установками и лишенное их недостатков.
Раскрытие изобретения
Для решения поставленной задачи предложена подъемная машина, содержащая двигатель, установленный на раму, вал, связанный с двигателем и установленный с возможностью вращения в заданном направлении, тормоз стопорения вращения вала в случае необходимости, и по меньшей мере один датчик нагрузки, установленный с возможностью сопротивления движению тормоза относительно рамы двигателя. Датчик нагрузки определяет величину нагрузки, возникающей при приложении силы торможения. Эта величина характеризует разницу веса кабины подъемника по сравнению с противовесом.
Датчик нагрузки может содержать динамометрический элемент, часть которого прикреплена непосредственно к раме двигателя, а часть прикреплена непосредственно к тормозу. Подъемная машина может быть снабжена по крайней мере одним блокирующим элементом, установленным с возможностью сопротивления вращению тормоза относительно рамы двигателя при нагрузке, большей порогового значения нагрузки датчика нагрузки.
Датчик нагрузки может иметь основную часть и воспринимающую часть, при этом он расположен между тормозом и рамой двигателя таким образом, что воспринимающая часть обращена к нагрузке.
Датчик нагрузки также может быть расположен между соответствующими поверхностями на тормозе и раме двигателя таким образом, что на датчик нагрузки воздействует усилие сжатия при приложении силы торможения. Он также может быть установлен на номинальном расстоянии от по крайней мере одной из соответствующих поверхностей.
В предпочтительном варианте подъемная машина может содержать амортизирующий элемент, расположенный по крайней мере частично между датчиком нагрузки и по крайней мере одной поверхностью.
В другом предпочтительном варианте подъемная машина содержит элемент ограничения перемещения тормоза относительно рамы двигателя. Причем элемент ограничения перемещения тормоза относительно рамы двигателя может быть установлен с возможностью оказания сопротивления радиальному перемещению тормоза относительно продольной оси вала. Элемент ограничения перемещения тормоза относительно рамы двигателя может содержать второй датчик нагрузки, вырабатывающий сигнал нагрузки, а также может быть установлен со сдвигом по окружности на угол приблизительно 90° от места расположения датчика нагрузки относительно продольной оси вала.
Предпочтительно элемент ограничения перемещения тормоза относительно рамы двигателя содержит амортизирующий элемент, который по крайней мере частично воспринимает нагрузку.
Предложен также второй вариант подъемной машины, состоящей из вращающих элементов и неподвижных элементов жесткости и тормоза, взаимодействующего с вращающей частью и содержащей первый элемент сопротивления перемещению тормоза относительно элемента жесткости при воздействии нагрузки между тормозом и элементом жесткости, не превышающего пороговой рабочей нагрузки первого элемента, и второй элемент сопротивления перемещению тормоза относительно элемента жесткости при превышении нагрузки порогового значения рабочей нагрузки.
Предпочтительно второй элемент содержит группу блокирующих элементов, каждый из которых прикреплен как к элементу жесткости, так и к тормозу, при этом блокирующие элементы установлены с возможностью сопротивления перемещению тормоза относительно элемента жесткости при превышении нагрузки порогового значения рабочей нагрузки.
Блокирующие элементы могут быть разнесены на номинальное расстояние, а тормоз установлен с возможностью перемещения относительно элемента жесткости на расстояние, соответствующее номинальному расстоянию перед сопротивлением перемещению блокирующих элементов.
Подъемная машина может также содержать амортизирующий элемент по крайней мере частично между блокирующими элементами для по крайней мере частичного поглощения нагрузки.
Предпочтительно первый элемент содержит датчик нагрузки, вырабатывающий сигнал нагрузки, действующей между тормозом и элементом жесткости.
В другом аспекте изобретения предложен способ измерения нагрузки в подъемной установке, которая содержит подъемную машину, двигатель который установлен на раме двигателя, вал, вращаемый двигателем в заданном направлении, и тормоз, при необходимости сопротивляющийся вращению вала. В предлагаемом способе к валу прикладывают тормозящую силу с возникновением нагрузки, заставляющей тормоз перемещаться относительно рамы двигателя, при нагрузке ниже пороговой оказывают сопротивление перемещению тормоза относительно рамы двигателя и вырабатывают сигнал нагрузки посредством первого элемента сопротивления, при нагрузке, превышающей пороговое значение нагрузки, оказывают сопротивление перемещению тормоза относительно рамы двигателя посредством второго элемента сопротивления. При этом первый элемент сопротивления может содержать датчик нагрузки, вырабатывающий сигнал нагрузки.
В предпочтительном варианте вес кабины подъемника определяют на основе сигнала нагрузки.
Различные признаки и преимущества настоящего изобретения будут очевидны специалистам при ознакомлении с подробным описанием предпочтительных вариантов выполнения. Ниже приведено краткое описание приложенных к подробному описанию чертежей.
Краткое описание чертежей
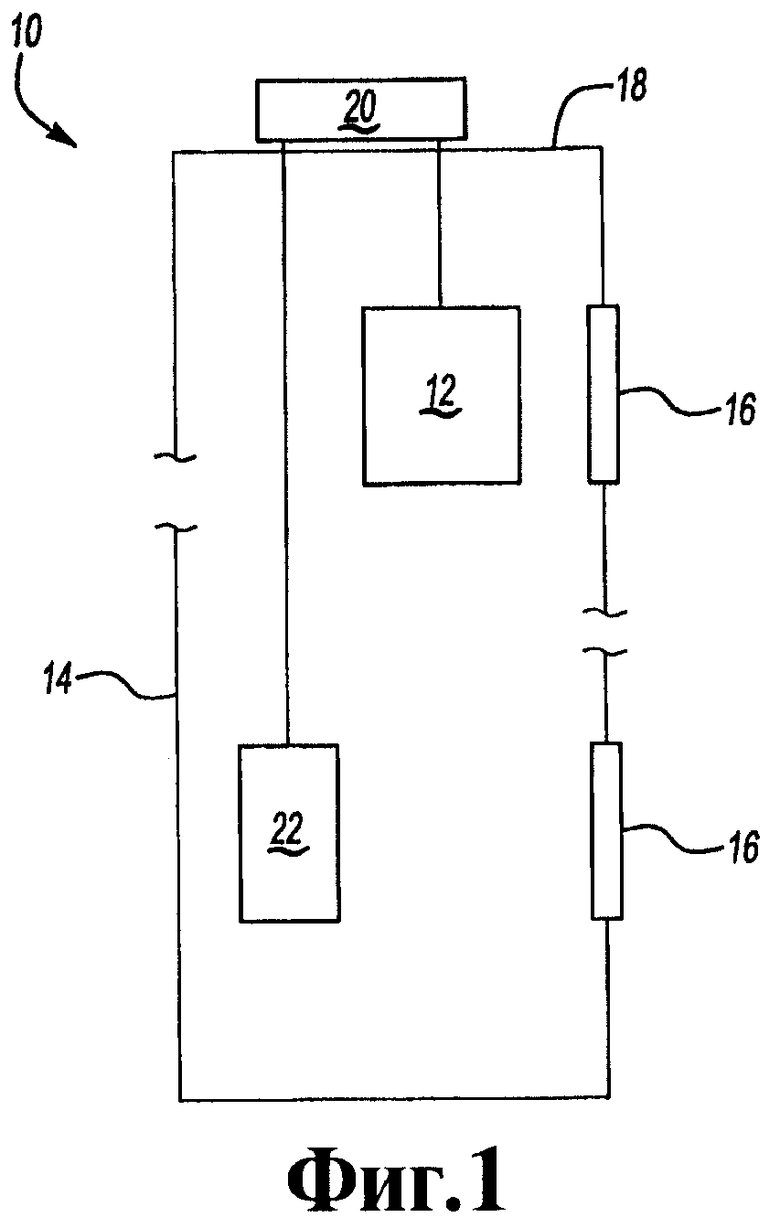
На Фиг.1 схематически представлены отдельные части рассматриваемой в качестве примера конструкции лифта.
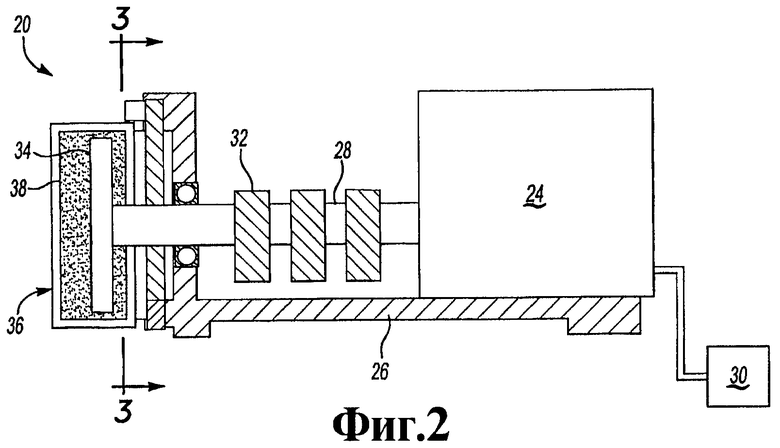
На Фиг.2 схематически показан вид в поперечном сечении отдельных частей рассматриваемой в качестве примера подъемной машины.
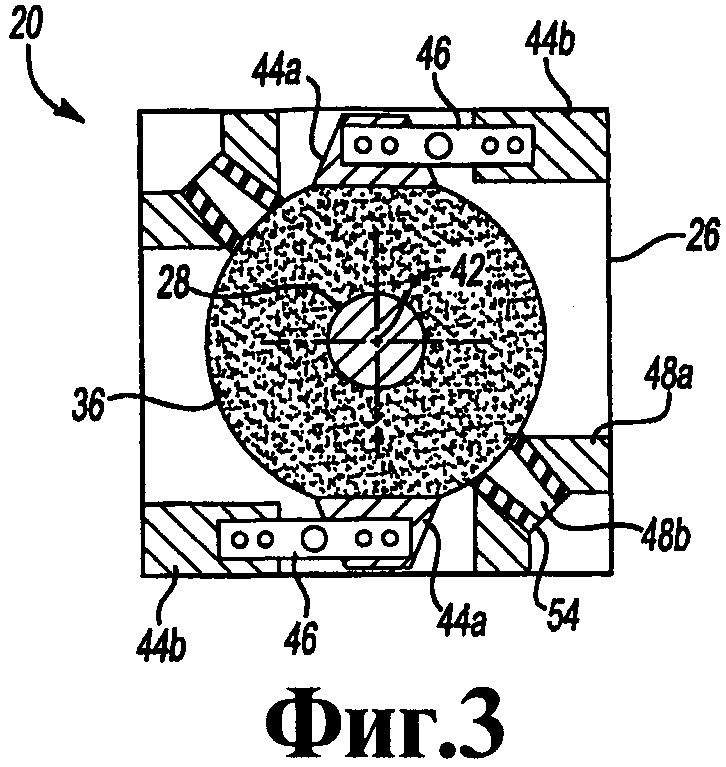
На Фиг.3 схематически представлен вид рассматриваемой в качестве примера подъемной машины, показанной на Фиг.2, соответствующий виду поперечного сечения по линиям 3-3.
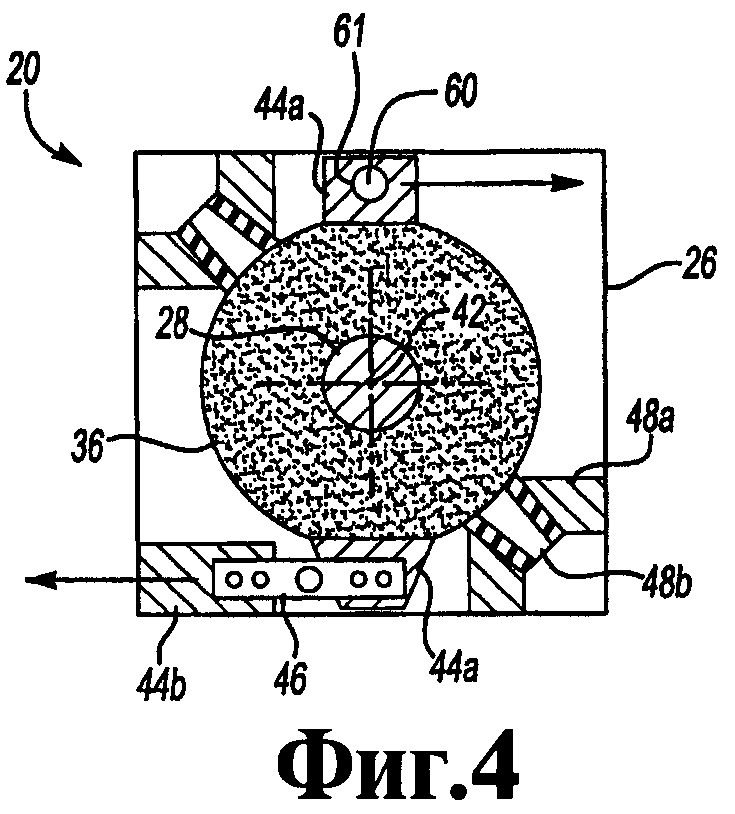
На Фиг.4 схематически представлен вид отдельных частей другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
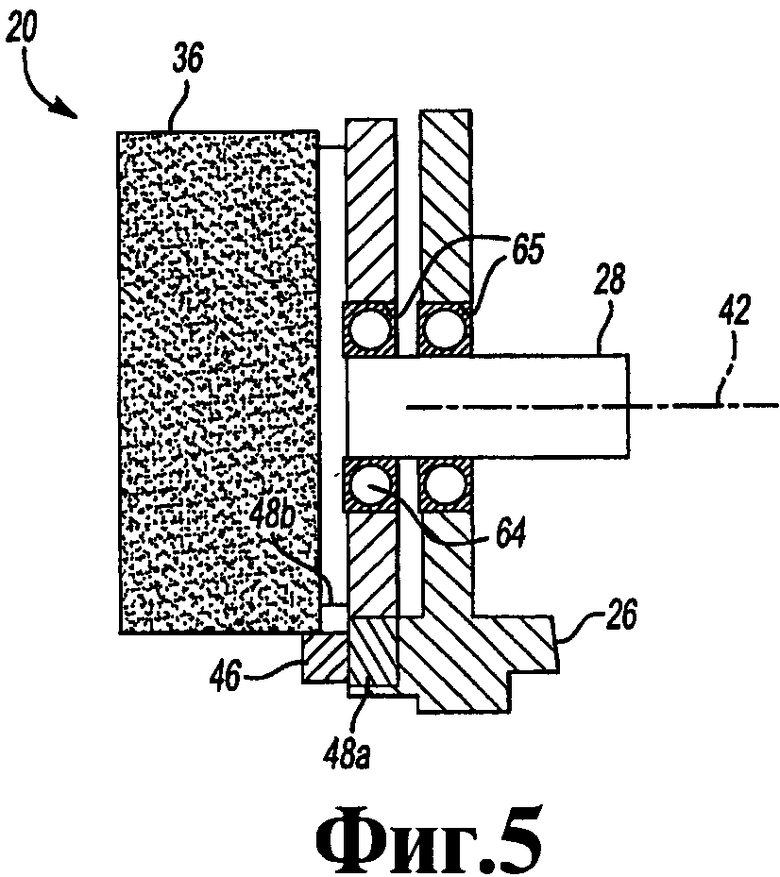
На Фиг.5 схематически представлен вид фрагмента поперечного сечения отдельных частей другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
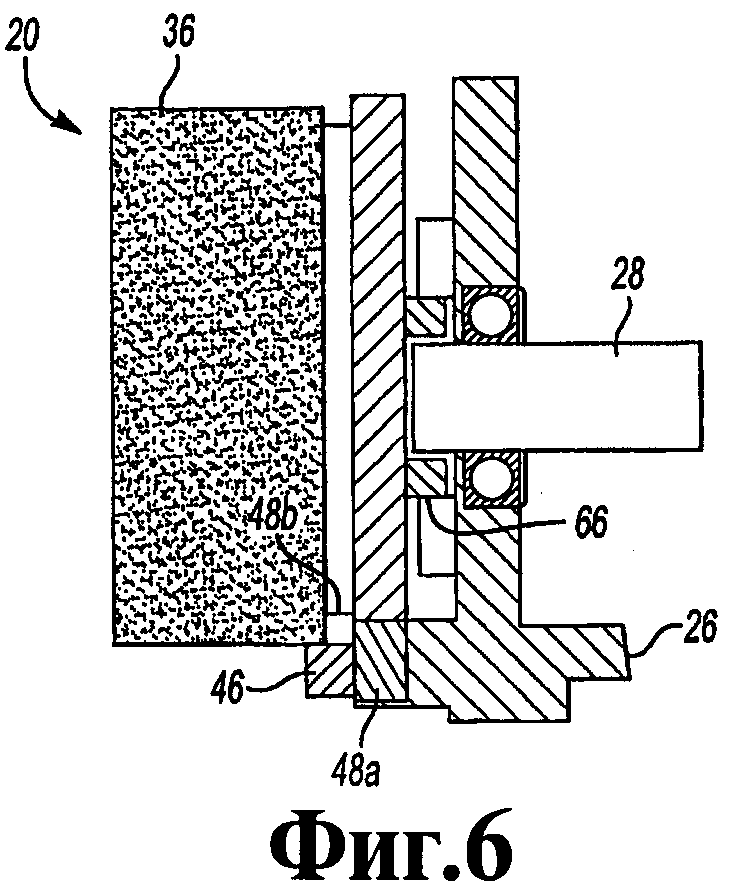
На Фиг.6 схематически показан вид фрагмента поперечного сечения другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
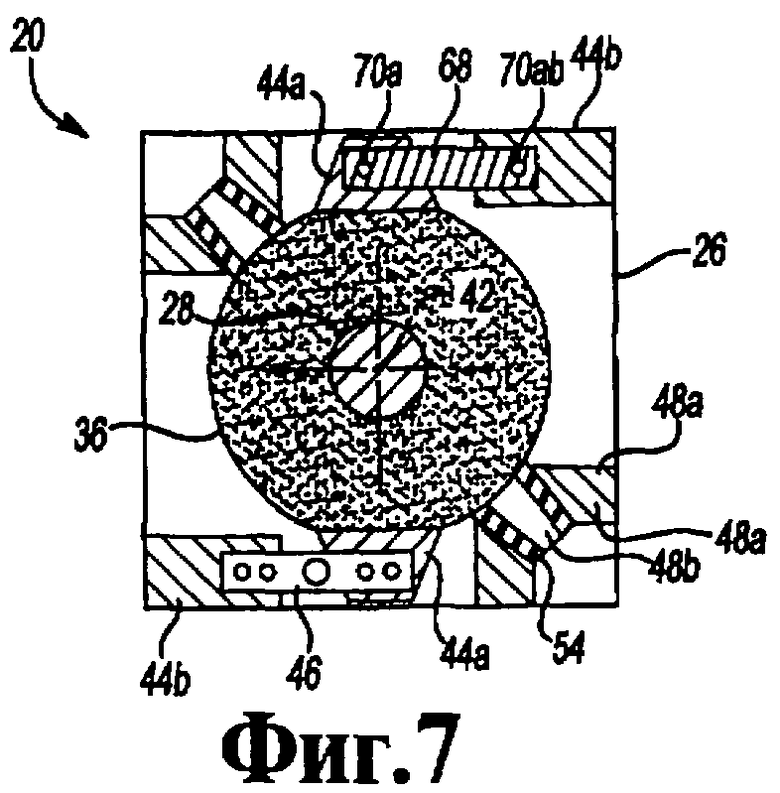
На Фиг.7 схематически показаны отдельные части другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
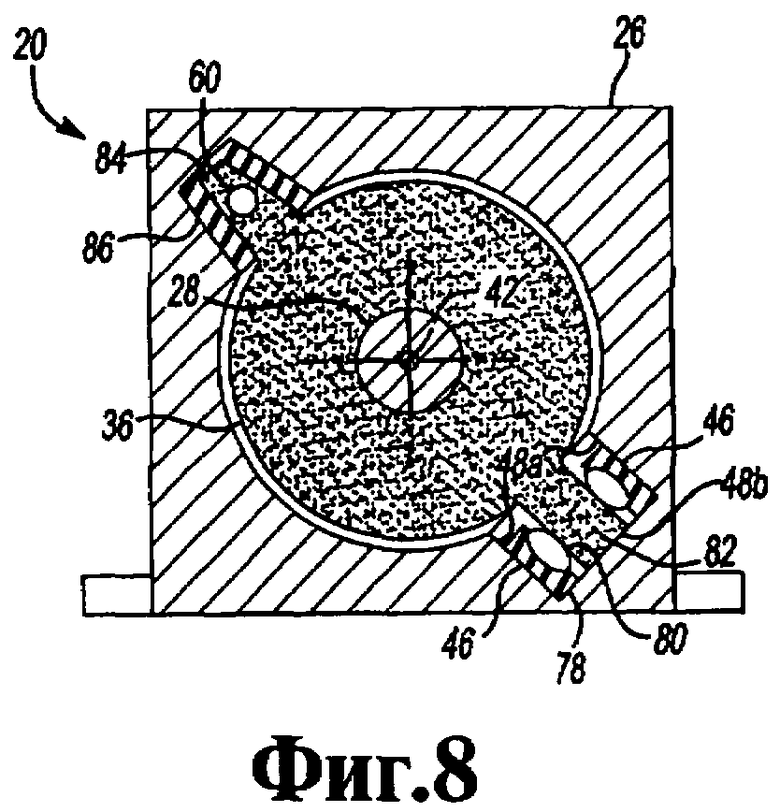
На Фиг.8 схематически показаны отдельные части другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
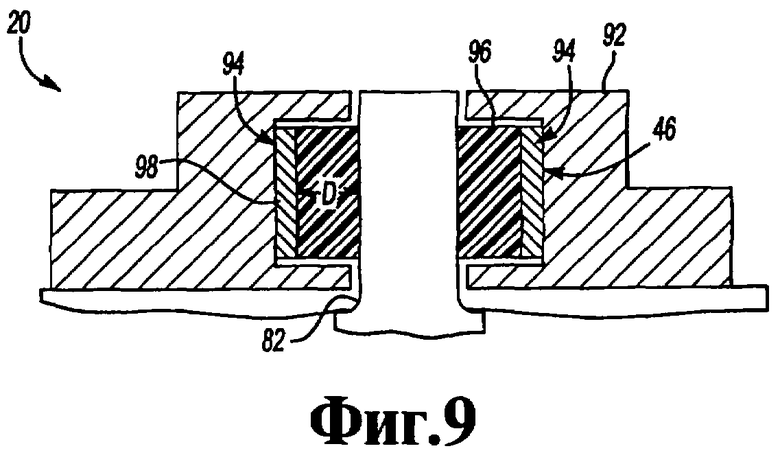
На Фиг.9 схематически показан вид фрагмента поперечного сечения отдельных частей и другого варианта выполнения рассматриваемой в качестве примера подъемной машины.
Осуществление изобретения
На Фиг.1 представлены некоторые части рассматриваемой в качестве примера конструкции лифта 10, включающей кабину 12 лифта, которая перемещается в шахте 14 лифта между площадками 16 этажей здания. В представленном примере, на платформе 18 над кабиной 12 лифта установлена подъемная машина 20. Подъемная машина 20 обычным путем перемещает кабину 12 и противовес 22 вверх и вниз в шахте 14 лифта для перевозки груза, пассажиров либо груза вместе с пассажирами.
На Фиг.2 показан вид поперечного сечения отдельных частей рассматриваемой в качестве примера подъемной машины 20, включающей в себя двигатель 24, установленный на раме 26 двигателя. Двигатель 24 приводит во вращение вал 28 в заданном направлении по командам от контроллера 30. Вращающийся вал 28 приводит во вращение ведущие шкивы 32, которые перемещают канаты или ремни для перемещения обычным способом кабины 12 лифта и противовеса 22 в шахте 14 лифта.
Приведенный в качестве примера вал 28 включает диск 34, расположенный внутри тормоза 36. Часть 38 тормоза 36 передает заданную силу торможения на диск 34 для стопорения вращения вала 28. В одном из примеров, контроллер 30 передает сигнал на часть 38 для создания тормозного усилия, достаточного для удержания кабины 12 лифта на заданной площадке 16 здания, в другом - передает сигнал о замедлении движения кабины 12 лифта.
Фиг.3 отображает в поперечном сечении отдельные части подъемной машины 20, показанной в качестве примера на Фиг.2, расположенные по периферии от продольной оси 42 вала 28. Тормоз 36 включает в себя монтажные приливы 44а, к каждому из которых прикрепляется один конец датчика 46 нагрузки. В одном из примеров, датчики 46 нагрузки включают в себя динамометрический элемент, работающий на растяжение и сжатие, который дает показания о напряжениях растяжения и сжатия. В других примерах, в датчиках 46 нагрузки могут использоваться измерительные устройства других известных типов, например, потенциометры, измерители сближения, оптические измерители, или, например, пьезоэлектрические элементы.
Рама 26 двигателя включает соответствующие монтажные приливы 44b, на каждом из которых закреплен противоположный конец соответствующего датчика 46 нагрузки. В показанном на чертеже примере, датчики 46 нагрузки прикреплены к монтажным приливам 44а и 44b крепежными элементами, хотя возможны и другие способы крепления.
При воздействии силы торможения на диск 34 между тормозом 36 и рамой 26 двигателя возникает нагрузка. Эта нагрузка характеризует разницу в весе между кабиной 12 лифта и противовесом 22 (например, вес груза, пассажиров и др. в кабине 12 лифта). Различие в весе вызывает относительное вращательное движение (крутящий момент) вокруг оси 42 между тормозом 36 и рамой 26 двигателя. Датчики 46 нагрузки противодействуют этому движению и выдают сигнал, характеризующий нагрузку, например, на контроллер 30.
Подобная конструкция позволяет получить определенные преимущества, заключающиеся в возможности определения тормозного сопротивления на тормозе 36 и исключить датчики (например, микровыключатели и датчики сближения), используемые в известных конструкциях тормозов. Тормозное сопротивление на тормозе 36 возникает, когда часть 38 не передает полностью силу торможения на диск 34. В известных конструкциях тормозов, датчики передают сигнал о приложении силы торможения путем направления сигнала обратной связи на контроллер 30. Эта функция заменяется в датчиках 46 нагрузки, которые показывают нагрузку, действующую между тормозом 36 и рамой 26 двигателя.
В представленном примере, соответствующие точки на датчиках 46 нагрузки (например, точки прикрепления к монтажному приливу 44а) расположены по окружности приблизительно напротив друг друга на 180° относительно оси 42. В одном примере, благодаря этому уравновешивается сопротивление движению вокруг вала 28 и сохраняется или даже увеличивается чувствительность в определении нагрузки.
Рама 26 двигателя и тормоз 36 включают соответствующие блокирующие элементы 48а и 48b, которые оказывают сопротивление взаимному перемещению между тормозом 36 и рамой 26 двигателя, если нагрузка превышает пороговое значение рабочей нагрузки датчиков 46 нагрузки. В одном примере, пороговое значение рабочей нагрузки представляет собой нагрузку, под действием которой по крайней мере один из датчиков 46 нагрузки отделяется от соответствующего монтажного прилива 44а или 44b, либо по иному более не оказывает сопротивление относительному вращению между тормозом и корпусом двигателя. Номинальное расстояние между блокирующими элементами 48а и 48b таково, что тормоз 36 может перемещаться относительно рамы 26 двигателя на расстояние, соответствующее номинальному расстоянию, до того, как блокирующие элементы 48а и 48b вместе начинают препятствовать движению. Эта особенность позволяет датчикам нагрузки выдерживать нагрузку при обычных обстоятельствах и обеспечивает сохранение или даже увеличение чувствительности датчиков 46 нагрузки, снижая или полностью устраняя любое снижающее нагрузку взаимодействие между блокирующими элементами 48а и 48b, когда нагрузка ниже порогового значения рабочей нагрузки.
В представленном примере, блокирующий элемент 48b представляет собой блокирующий элемент тормоза, который расположен между двумя блокирующими элементами 48а рамы двигателя. Если нагрузка превосходит пороговое значение рабочей нагрузки датчиков 46 нагрузки, тормоз 36 может приблизиться к предельной нагрузке датчиков нагрузки. При вращении на величину, соответствующую номинальному расстоянию между блокирующим и элементами 48а и 48b, блокирующие элементы 48b тормоза входят в зацепление с соответствующим блокирующим элементом 48а рамы двигателя, оказывая сопротивление дальнейшему движению тормоза 36. Эта особенность позволяет использовать более компактные, менее прочные и более точные датчики 46 нагрузки, по сравнению с известными конструкциями, поскольку не предусматривается, чтобы конструкция датчиков 46 нагрузки оказывала сопротивление нагрузкам, превосходящим пороговое значение нагрузки.
В представленном примере выполнения упругий амортизирующий элемент 54 установлен по крайней мере частично между блокирующими элементами 48а и 48b. Упругий амортизирующий элемент 54 по крайней мере частично поглощает воздействие нагрузки, когда блокирующие элементы 48а и 48b совместно сопротивляются относительному вращательному движению между тормозом 36 и рамой 26 двигателя. Эта особенность позволяет получать преимущество в снижении шума при совместной работе блокирующих элементов.
На Фиг.4 показаны отдельные части другого варианта выполнения подъемной машины 20, включающего элемент ограничения перемещения тормоза относительно рамы двигателя 60, оказывающий сопротивление перемещению при приложении тормозной нагрузки, который взаимодействует с единственным датчиком 46 нагрузки. В показанном примере элемент 60, оказывающий сопротивление, включает в себя стержень, проходящий сквозь отверстие 61 в одном из приливов 44а для крепления тормоза и часть рамы 26 двигателя, хотя следует иметь в виду, что могут быть использованы элементы 60, оказывающие сопротивление, других типов и в других вариантах конструкции.
Отверстие 61 и часть рамы 26 двигателя, куда вставляется элемент 60, оказывающий сопротивление, характеризуются внутренним диаметром, обеспечивающим свободное вращательное движение относительно наружного диаметра элемента 60, оказывающего сопротивление, благодаря чему тормоз 36 имеет возможность ограниченного перемещения относительно рамы 26 двигателя. Когда тормоз 36 прилагает силу торможения к валу 28, то возникающая нагрузка между тормозом 36 и рамой 26 двигателя заставляет тормоз 36 поворачиваться относительно рамы 26 двигателя. Стержень и датчик 46 нагрузки уравновешивают эту нагрузку относительно оси 42, предотвращая существенное радиальное смещение (т.е. не вращательное движение) тормоза 36 относительно рамы 26 двигателя (но допуская вращательное движение тормоза 36). Незначительное перемещение обеспечивает передачу нагрузки или реагирование от стержня к датчику 46 нагрузки. При этом предотвращается сильное перемещение, которое не позволило бы передать нагрузку на датчик 46 нагрузки. Стержень, таким образом, выполняет две функции - стабилизацию тормоза 36 относительно воздействующей нагрузки и передачу нагрузки на датчик 46 нагрузки. Использование элемента 60, оказывающего сопротивление, позволяет создать менее дорогую установку по сравнению с установкой, содержащей несколько датчиков нагрузки, показанную, например, на Фиг.3.
На Фиг.5 показаны отдельные части другого варианта выполнения подъемной машины 20, который включает несущий элемент 64, оказывающий сопротивление, который расположен по окружности вокруг части вала 28.
Несущий элемент 64 характеризуется внутренним диаметром и наружным диаметром и вставляется в соответствующее отверстие, выполненное в тормозе 36 и раме 26 двигателя. Наружный диаметр несущего элемента 64, оказывающего сопротивление, несколько меньше внутреннего диаметра отверстия 65, поэтому тормоз 36 может слегка перемещаться относительно рамы 26 двигателя. По аналогии со стержнем элемента 60, оказывающего сопротивление, в примере на Фиг.4, несущий элемент 64, оказывающий сопротивление, взаимодействует с единственным датчиком 46 нагрузки для уравновешивания результирующей нагрузки между тормозом 36 и рамой 26 двигателя для предотвращения значительного радиального смещения (т.е. не вращательного движения) тормоза 36 относительно рамы 26 двигателя.
На Фиг.6 показаны отдельные части другого варианта выполнения силового механизма 20, который включает элемент 66, оказывающий сопротивление, в виде вкладыша подшипника. По аналогии с несущим элементом 64, оказывающим сопротивление, элемент 66, оказывающий сопротивление, в виде вкладыша подшипника, и датчик 46 нагрузки вместе уравновешивают результирующее воздействующую нагрузку между тормозом 36 и рамой 26 двигателя для предотвращения значительного радиального смещения тормоза 36 относительно рамы 26 двигателя (разрешая небольшое перемещение).
На Фиг.7 показаны отдельные части другого варианта выполнения подъемной машины 20, аналогичного показанному на Фиг.3, который включает вместо одного из датчиков 46 нагрузки металлическую распорку 68.
По аналогии с вариантами со стержнем, опорой и вкладышем, металлическая распорка 68 и датчик46 нагрузки уравновешивают результирующую нагрузку, действующую между тормозом 36 и рамой 26 двигателя, предотвращая значительные радиальные перемещения тормоза 36 по отношению к раме 26 двигателя (но допуская малые смещения). Один конец металлической распорки 68 присоединен к приливу 44а крепления тормоза, а его противоположный конец присоединен к приливу 44b крепления рамы двигателя с использованием соответствующих крепежных элементов 70а и 70b. Крепежные элементы 70а и 70b в данном примере не обеспечивают жесткого крепления и допускают небольшое перемещение тормоза 36 относительно рамы 26 двигателя так, что датчик 46 нагрузки может противодействовать воздействующей нагрузке и выдавать соответствующий сигнал.
На Фиг.8 показаны отдельные части другого варианта выполнения подъемной машины 20, который включает датчики 46 нагрузки, работающие на сжатие, например, в виде динамометрических элементов, работающих на сжатие. Каждый из датчиков 46 нагрузки, работающих на сжатие, включает основную часть 78 и воспринимающую часть 80. В проиллюстрированном примере, основная часть 78 установлена обращенной к раме 26 двигателя, а воспринимающая часть 80 установлена обращенной к выступающему элементу 82 тормоза. Когда тормоз 36 прилагает к валу силу торможения, датчики 46 нагрузки, работающие на сжатие, показывают величину нагрузки между выступающим элементом 82 тормоза и рамой 26 двигателя, которое возникает от стремления тормоза вращаться относительно рамы 26 двигателя. В одном примере, один из датчиков 46 нагрузки, работающих на сжатие, показывает нагрузку, когда тормоз сопротивляется перемещению вала в одном направлении, а другой из датчиков 46 нагрузки, работающих на сжатие, показывает нагрузку, когда тормоз сопротивляется перемещению вала в другом направлении.
Если нагрузка превосходит пороговое значение нагрузки датчика 46 нагрузки, работающего на сжатие, выступающий элемент 82 тормоза действует как блокирующий элемент 48 тормоза и во взаимодействии с блокирующим элементом 48а рамы двигателя сопротивляется перемещению тормоза 36, как это было описано выше.
В показанном примере, тормоз 36 также включает второй выступающий элемент 84 тормоза, расположенный с противоположной относительно выступающего элемента 82 тормоза стороны. В проиллюстрированном примере, второй выступающий элемент 84 тормоза связан с элементом 60, оказывающим сопротивление. Этот элемент, оказывающий сопротивление, может быть заменен элементом крепления и вместо него может быть использован упругий амортизирующий элемент 86. Упругий амортизирующий элемент 86 обладает меньшей жесткостью по сравнению с жесткостью датчиков 46 нагрузки, работающих на сжатие, поэтому только небольшая доля нагрузки поглощается упругим амортизирующим элементом 86. Этот вариант выполнения обеспечивает более высокую чувствительность датчиков 46 нагрузки, работающих на сжатие, поскольку только небольшая часть нагрузки теряется за счет поглощения в упругом амортизирующем элементе 86 и элементе 60, оказывающем сопротивление.
На Фиг.9 показан вид фрагмента поперечного сечения отдельных частей другого варианта выполнения подъемной машины 20, который включает жесткий корпус 92, жестко прикрепленный к раме 26 двигателя. На корпусе 92 закреплен чувствительный элемент 94, который включает эластичный элемент 96, надеваемый на выступающий элемент 82 тормоза. Наружная часть 98 чувствительного элемента 94 представляет собой один электрод конденсатора, а выступающий элемент 82 тормоза является другим электродом. Эластичный элемент 96 определяет диэлектрические свойства чувствительного элемента.
В одном из примеров, эластичный элемент 96 выполнен из известного полимерного материала, изменяющего емкость чувствительного элемента 94 при изменении размеров полимерного материала. В представленном примере, полимерный материал изменяет размер (например, размер D) под действием нагрузки, действующей между тормозом 36 и рамой 26 двигателя, когда тормоз 36 прилагает силу торможения. Усилие передается через выступающий элемент 82 тормоза, сжимая эластичный элемент 96. В одном из примеров, нагрузка сжимает полимерный материал, и чувствительные элементы 94 выдают сигнал об изменении электрической емкости в результате сжатия полимерного материала. Изменение электрической емкости известным образом соответствует размеру D сжатия полимерного материала. Размер D соответствует нагрузке, воздействующей на полимерный материал, например, согласно известным зависимостям деформации от напряжения. Контроллер 30 получает данные о емкости и определяет нагрузку, действующую между тормозом 36 и рамой 26 двигателя, на основе известного соотношения между электрической емкостью и нагрузкой.
Хотя выше был раскрыт предпочтительный вариант выполнения настоящего изобретения, специалисту должно быть ясно, что определенные изменения попадают в область патентных притязаний изобретения. Поэтому для определения истинной области притязаний и существа изобретения следует изучить прилагаемую формулу изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАПРАВЛЯЮЩИЙ УЗЕЛ ЛИФТОВОЙ СИСТЕМЫ И СПОСОБ ИЗМЕНЕНИЯ ЖЕСТКОСТИ НАПРАВЛЯЮЩЕГО РОЛИКА КАБИНЫ ЛИФТА | 2006 |
|
RU2428368C2 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| УПРАВЛЕНИЕ КРУТЯЩИМ МОМЕНТОМ ПРИ ТОРМОЖЕНИИ | 2009 |
|
RU2484004C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) И ПОДЪЕМНАЯ МАШИНА | 2005 |
|
RU2460912C2 |
| ТОНКАЯ ВЫСОКОПРОЧНАЯ ПРОВОЛОКА ДЛЯ ПОДЪЕМНОГО КАНАТА ЛИФТА | 2001 |
|
RU2492130C2 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| НАПРАВЛЯЮЩАЯ ИЗ ЛИСТОВОГО МЕТАЛЛА ДЛЯ ПОДЪЕМНОЙ СИСТЕМЫ | 2010 |
|
RU2565638C2 |
| ПЛАТФОРМА ПОДЪЕМНОГО УСТРОЙСТВА | 1993 |
|
RU2121962C1 |
Изобретения касаются подъемной машины для использования в подъемно-транспортном оборудовании, содержащей двигатель, установленный на раме, вал, соединенный с двигателем и установленный с возможностью вращения в заданном направлении, а также способа измерения нагрузки в подъемной системе. Для стопорения вращения вала в случае необходимости предусмотрен тормоз. Если тормоз начинает перемещаться в нежелательном движении, то этому движению начинает сопротивляться, по крайней мере, один датчик нагрузки, который вырабатывает сигнал нагрузки, возникающей при приложении силы торможения. Раскрытый в описании пример включает использование первого элемента, оказывающего сопротивление, для сопротивления перемещению тормоза относительно рамы двигателя, когда величина нагрузки меньше порогового значения нагрузки, и использование второго элемента, оказывающего сопротивление, для сопротивления перемещению, когда нагрузка превышает пороговое значение. Изобретения обеспечивают улучшенные характеристики при измерении тормозного усилия в подъемной установке. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Подъемная машина, содержащая, по меньшей мере, один двигатель, установленный на раме, вал вращения, соединенный с двигателем, тормоз, взаимодействующий с валом вращения, и по меньшей мере один датчик определения нагрузки через тормозное усилие, отличающаяся тем, что датчик нагрузки установлен с возможностью сопротивления движению тормоза относительно рамы двигателя.
2. Машина по п.1, отличающаяся тем, что датчик нагрузки содержит динамометрический элемент, часть которого прикреплена непосредственно к раме двигателя, а часть прикреплена непосредственно к тормозу.
3. Машина по п.1, отличающаяся тем, что она содержит по крайней мере один блокирующий элемент, установленный с возможностью сопротивления вращению тормоза относительно рамы двигателя при нагрузке, большей порогового значения нагрузки датчика нагрузки.
4. Машина по п.1, отличающаяся тем, что датчик нагрузки содержит основную и воспринимающую части и установлен между тормозом и рамой двигателя воспринимающей частью, обращенной к нагрузке.
5. Машина по п.1, отличающаяся тем, что датчик нагрузки установлен между соответствующими поверхностями на тормозе и раме двигателя с возможностью восприятия усилий сжатия при приложении силы торможения.
6. Машина по п.5, отличающаяся тем, что датчик нагрузки установлен на номинальном расстоянии от, по крайней мере, одной из соответствующих поверхностей.
7. Машина по п.6, отличающаяся тем, что она содержит амортизирующий элемент, расположенный по крайней мере частично между датчиком нагрузки и по крайней мере одной поверхностью.
8. Машина по п.1, отличающаяся тем, что она содержит элемент ограничения перемещения тормоза относительно рамы двигателя.
9. Машина по п.8, отличающаяся тем, что элемент ограничения перемещения тормоза установлен с возможностью сопротивления радиальному перемещению тормоза относительно продольной оси вала.
10. Машина по п.8, отличающаяся тем, что элемент ограничения перемещения тормоза содержит второй датчик нагрузки.
11. Машина по п.8, отличающаяся тем, что элемент ограничения перемещения тормоза установлен со сдвигом по окружности на угол приблизительно 90° от места расположения датчика нагрузки относительно продольной оси вала.
12. Машина по п.8, отличающаяся тем, что элемент ограничения перемещения тормоза содержит амортизирующий элемент, который по крайней мере частично воспринимает нагрузку.
13. Подъемная машина, состоящая из вращающих частей и неподвижного элемента жесткости, а также тормоза, взаимодействующего с вращающей частью, отличающаяся тем, что она содержит первый элемент сопротивления перемещению тормоза относительно элемента жесткости при воздействии нагрузкой между тормозом и элементом жесткости, не превышающей пороговой рабочей нагрузки первого элемента, и второй элемент сопротивления перемещению тормоза относительно элемента жесткости при превышении нагрузкой порогового значения рабочей нагрузки.
14. Машина по п.13, отличающаяся тем, что второй элемент содержит группу блокирующих элементов, каждый из которых прикреплен как к элементу жесткости, так и к тормозу, при этом каждый блокирующий элемент установлен с возможностью сопротивления перемещению тормоза относительно элемента жесткости при превышении нагрузкой порогового значения рабочей нагрузки.
15. Машина по п.14, отличающаяся тем, что блокирующие элементы установлены разнесенными на номинальное расстояние, а тормоз установлен с возможностью перемещения относительно элемента жесткости на расстояние, соответствующее названному номинальному расстоянию, существовавшему до сопротивления блокирующих элементов упомянутому перемещению.
16. Машина по п.15, отличающаяся тем, что она содержит амортизирующий элемент, расположенный по крайней мере частично между блокирующими элементами для по крайней мере частичного восприятия нагрузки.
17. Машина по п.13, отличающаяся тем, что первый элемент содержит датчик нагрузки, возникающей между тормозом и элементом жесткости.
18. Способ измерения нагрузки в подъемной системе, содержащей подъемную машину, двигатель которой установлен на раме двигателя, вал, который вращают посредством двигателя в заданном направлении, и тормоз, которым при необходимости стопорят вращение вала, отличающийся тем, что к валу прикладывают силу торможения при величине нагрузки, от которой тормоз перемещается относительно рамы двигателя, при этом при нагрузке ниже пороговой оказывают сопротивление перемещению тормоза относительно рамы двигателя и вырабатывают сигнал нагрузки посредством первого элемента сопротивления, а при нагрузке, превышающей пороговое значение нагрузки, оказывают сопротивление перемещению тормоза относительно рамы двигателя посредством второго элемента сопротивления.
19. Способ по п.18, отличающийся тем, что сигнал нагрузки в первом элементе сопротивления вырабатывают посредством датчика нагрузки.
20. Способ по п.19, отличающийся тем, что вес кабины подъемника определяют на основе сигнала нагрузки.
| US 5233139 А, 03.08.1993 | |||
| Устройство для испытания лифтовых лебедок | 1974 |
|
SU512401A1 |
| Грузоподъемное устройство | 1979 |
|
SU899449A1 |
| ЛИФТ | 1990 |
|
RU2021964C1 |
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| US 3751126 А, 12.05.1998. | |||

