Изобретение относится к области технических средств, используемых для управления активными воздействиями на различные облака с целью предотвращения градобитии и вызывания осадков.
Известны различные автоматизированные системы для сбора, обработки и накопления метеоинформации, состоящие из двухканального метеорадиолокатора, аппаратуры первичной обработки радиолокационной информации и вычислителя (Принципы построения автоматизированных систем метеорологического обеспечения авиации/Под ред. д-ра физ.-мат. наук, проф. Г.Г. Щукина. -Л.: Гидрометеоиздат, 1991, с.155-200).
Программное обеспечение таких автоматизированных систем позволяет получать необходимую прогностическую информацию о зондируемом пространстве и выдавать метеоинформацию потребителю в виде цифрокарт отражаемости на цветной телевизионный терминал или цифропечать. Недостатком указанных систем является то, что, они предназначены для решения узких задач, связанных с метеорологическим обеспечением современной авиации. Данные системы по своей структуре не в состоянии обеспечить автоматизацию управления активными воздействиями на облака и облачные системы.
Известна также автоматизированная система противоградовой защиты, содержащая размещенные на пункте управления активными воздействиями метеорадиолокатор с первым и вторым частотными каналами, а также каналы управления антенной по азимуту и углу места, систему управления с блоком вычислителей, связанную через аналого-цифровые преобразователи с выходами метеорадиолокатора и с аппаратурой приема и телепередачи команд, а также размещенную на стационарном пункте воздействия ракетную пусковую установку (объект управления) с механизмами вертикального и горизонтального наведения, снабженными датчиками углового положения (Абшаев М.Т., Капитанников А.В., Тапасханов В. О. Принципы обработки информации в автоматизированной системе противоградовой защиты./Ст. - Л.: Гидрометеоиздат, 1989, с.81-85).
Недостатком известного технического решения является низкая эффективность и сложность системы управления, базирующейся на значительном количестве микроЭВМ и микросхем памяти. Указанные недостатки приводят к тому, что в оперативной работе персоналу сложно освоить работу многопроцессорной вычислительной системы, требующей сложных манипуляций для запуска программного обеспечения.
Другим серьезным недостатком известной автоматизированной системы является то, что она не в состоянии обеспечить одновременный контроль метеообстановки и управление активными воздействиями на облака в автоматическом режиме.
Наиболее близким по технической сущности к заявляемому объекту является автоматизированная система противоградовой защиты, содержащая размещенные на пункте управления активными воздействиями метеорадиолокатор с первым и вторым частотными каналами, а также каналы управления антенной по азимуту и углу места, систему управления локатором и активными воздействиями, включающую вычислитель, связанный через аналого-цифровые преобразователи с выходами метеорадиолокатора и устройством приема и телепередачи данных, а также размещенную на стационарном ракетном пункте воздействия второе устройство приема и телепередачи данных, и связанный с ним блок управления стрельбой, сопряженный с ракетными пусковыми установками (патент Российской федерации 2083999, 1997 г. - прототип).
Данная автоматизированная система широко применяется как у нас в стране, так и за рубежом для управления активными воздействиями на градовые облака с применением ракетной техники.
Вместе с тем функциональные возможности автоматизированной системы ограничены. Так, например, при существующем составе и программном обеспечении она может быть использована только для управления активными воздействиями на облака с использованием стационарных ракетных пунктов воздействия и не может быть использована одновременно для управления активными воздействиями при использовании воздушных и наземных мобильных пунктов, каковыми могут быть самолеты и наземные передвижные комплексы, оснащенные соответствующими средствами активных воздействий.
Указанные недостатки сдерживают внедрение в практику более эффективных методов воздействия на облака и облачные системы с применением авиационных и мобильных наземных комплексов, дающих в комплексе со стационарными ракетными пунктами воздействия более значимый результат при борьбе с засухой, градобитием и лесными пожарами.
Техническим результатом, от использования заявленного технического решения, является расширение функциональных возможностей автоматизированной системы и повышение ее эффективности.
Технический результат достигается тем, что известная автоматизированная система управления активными воздействиями на облака, содержащая размещенные на пункте управления активными воздействиями, метеорадиолокатор с первым и вторым частотными каналами, а также каналы управления антенной по азимуту и углу места, систему управления локатором и активными воздействиями, включающую вычислитель, связанный через аналого-цифровые преобразователи с выходами метеорадиолокатора и устройством приема и телепередачи данных, а также размещенные на стационарном ракетном пункте воздействия - второе устройство приема и телепередачи данных, и связанный с ним блок управления стрельбой, сопряженный с ракетными пусковыми установками, она содержит дополнительно размещенные на борту самолета, либо другом транспортном средстве, средства активных воздействий, снабженные исполнительными механизмами, связанный с исполнительными механизмами блок управления средствами активных воздействий, содержащий вычислитель, к каждому управляющему выходу которого подключены последовательно цифроаналоговый преобразователь и усилитель мощности, подключенный в свою очередь к входу исполнительного механизма соответствующего средства активного воздействия, при этом к первому входу вычислителя подключено устройство приема и телепередачи данных, а ко второму и третьему его входам подключены соответственно спутниковый определитель координат и пульт ручного управления.
Сущность изобретения поясняется рисунком, где изображена принципиальная схема автоматизированной системы управления активными воздействиями на облака.
Автоматизированная система управления активными воздействиями на облака содержит связанные между собой каналами коммуникационной связи пункт управления активными воздействиями 1, стационарный ракетный пункт воздействия 2 и мобильный авиационный пункт воздействия 3.
На пункте управления активными воздействиями 1 размещены метеорадиолокатор 4, система управления локатором и активными воздействиями 5, а также устройство приема и телепередачи данных 6. Система управления локатором и активными воздействиями 5 содержит вычислитель 7 и два аналого-цифровых преобразователя 8 и 9. Вычислитель 7 образован из двух последовательно подключенных процессоров 10 и 11. При этом к первому входу процессора 10 через аналого-цифровой преобразователь 8 подключен первый частотный канал 12 метеорадиолокатора 4, а ко второму входу процессора 10 через аналого-цифровой преобразователь 9 подключен второй частотный канал 13 метеорадиолокатора 4. К третьему и четвертому входам процессора 10 подключены соответственно каналы обратной связи датчиков положения антенны метеорадиолокатора по углу места 14 и азимуту 15 (датчики и антенна метеорадиолокатора на рисунке не показаны). К первому и второму выходу процессора 10 подключены соответственно канал управления антенной по углу места 16 и канал управления по азимуту 17.
Устройство приема и телепередачи данных 6 содержит радиостанцию 18, связанную с радиомодемом 19, к входу которого подключен процессор 11, связанный в свою очередь с процессором 10.
На стационарном ракетном пункте воздействия 2 размещены - второе устройство приема и телепередачи данных 20, включающее радиостанцию 21 и связанный с ним радиомодем 22, а также блок управления стрельбой 23, сопряженный с ракетной пусковой установкой 24, являющейся собственно объектом управления.
Блок управления стрельбой 23 содержит вычислитель 25, к первому выходу которого через цифроаналоговый преобразователь 26 подключен усилитель мощности 27, а ко второму его выходу через второй цифроаналоговый преобразователь 28 подключен второй усилитель мощности 29. К первому входу вычислителя 25 подключен радиомодем 22 устройства приема и телепередачи данных 20. Ракетная пусковая установка 24 содержит механизм вертикального наведения 30, к входу которого подключен выход усилителя мощности 27, и механизм горизонтального наведения 31, к входу которого подключен выход усилителя мощности 29. При этом выход механизма управления по углу возвышения 30 через датчик углового положения 32 подключен ко второму входу вычислителя 25, а выход механизма управления по азимуту 31 через датчик углового положения 33 подключен к третьему входу вычислителя 25. К четвертому входу вычислителя 25 подключен пульт ручного управления 34 для управления ракетной пусковой установкой 24 в аварийных ситуациях.
Автоматизированная система управления активными воздействиями на облака содержит также размещенные последовательно на борту самолета, либо другом транспортном средстве, устройство приема и телепередачи данных 35, содержащее радиостанцию 36 и подключенный к нему радиомодем 37, блок управления 38, и сопряженные с ним бортовые средства активных воздействий 39, 40 и 41, количество и состав которых может быть различными в зависимости от применяемой технологии. В данном случае на борту самолета размещены бортовая ракетная установка 39. устройство для распыления жидких хладореагентов в облачную среду 40. и устройство для внесения гранул твердой углекислоты в облачную среду 41.
Блок управления 38 содержит вычислитель 42 с пультом управления 43. К первому управляющему выходу вычислителя 42 подключены последовательно цифроаналоговый преобразователь 44 и усилитель мощности 45, связанный с исполнительным механизмом управления 46 бортовой ракетной установки 39. К второму управляющему выходу вычислителя 42 подключены аналогично второй цифроаналоговый преобразователь 47 и второй усилитель мощности 48, подключенный своим выходом к входу исполнительного механизма 49 устройства для распыления жидких хладореагентов в облачную среду 40. И, наконец, к третьему управляющему выходу вычислителя 42 подключены последовательно третий цифроаналоговый преобразователь 50 и третий усилитель мощности 51, подключенный в свою очередь к исполнительному механизму 52 устройства для внесения гранул твердой углекислоты в облачную среду 41. При этом к первому входу вычислителя 42 подключен радиомодем 37 устройства приема и телепередачи данных 35, а ко второму его входу подключен спутниковый определитель координат 53.
Автоматизированная система управления активными воздействиями на облака работает следующим образом.
В процессе зондирования атмосферы, выделенные сигналы частотных каналов 12 и 13, на длинах волны 3,5 и 10 см, поступают в систему управления локатором и активными воздействиями 5, где сигнал из первого частотного канала 12 через аналого-цифровой преобразователь 8 поступает на первый вход процессора 10, а сигнал от второго частотного канала 13 через второй аналого-цифровой преобразователь 9 поступает на второй вход процессора 10. В аналого-цифровых преобразователях 8 и 9 сигналы преобразуются в цифровую форму, удобную для вычислений. В процессе работы метеорадиолокатора управление антенной осуществляется процессором 10. При этом управляющие сигналы от процессора 10 в локатор 4 поступают соответственно по каналу управления антенной по углу места 16, и по каналу управления антенной по азимуту 17. Обработку заданных углов возвышения и азимута осуществляется процессором 10 с учетом сигналов, поступающих по каналам обратной связи датчиков положения антенны по углу места 14 и азимуту 15.
После того, как по командам процессора 10 будет отработано заданное число оборотов антенны локатора 4, и образован необходимый массив данных о метеообъекте, процессор 10 по заданному алгоритму осуществляет анализ метеообстановки и выделяет площадку засева в облаке. Затем информация, касающаяся площадки засева, передается от процессора 10 в процессор 11 для дальнейшего анализа. После этого процессор 10 тут же приступает к анализу новой метеообстановки, а процессор 11 по соответствующему алгоритму осуществляет обработку информации, поступившей о площадках засева. При использовании стационарных ракетных пунктов воздействия 2 процессор 11 выделяет из них наиболее оптимально расположенные по отношению к облаку, а затем вырабатывает координаты стрельб и определяет необходимое количество ракет для обработки выделенной площадки засева в облаке. Выработанные сигналы управления из процессора 11 поступают в устройство приема и телепередачи данных 6, где через радиомодем 19 и радиостанцию 18 по каналам радиосвязи поступают на стационарный ракетный пункт воздействия 2. На стационарном ракетном пункте воздействия 2 сигналы управления поступают в устройство приема и телепередачи данных 20, где принимаются радиостанцией 21 и через радиомодем 22 поступают на первый вход вычислителя 25 блока управления стрельбой 23. Вычислитель 25 после обработки сигналов разделяет команду на управляющие коды по углу возвышения и азимуту. После чего команды через цифроаналоговые преобразователи 26 и 28 подаются соответственно на вход усилителя мощности 27 и на вход усилителя мощности 29. Усиленный сигнал из усилителя мощности 27 поступает на вход механизма вертикального наведения 30, а из усилителя 29 - на вход механизма горизонтального наведения 31 ракетной пусковой установки 24. После отработки заданных команд (контролируется датчиками углового положения 32 и 33), вычислитель 25 выдает команду на пуск ракет. После пуска ракет вычислитель 25 через радиомодем 22 и радиостанцию 21 выдает на пункт управления активными воздействиями 1 информацию о выполнении команд. На пункте управления активными воздействиями 1 данная информация обрабатывается и регистрируется. После этого цикл воздействия на облака при необходимости повторяется. В особых случаях, обусловленных техническими причинами, управление ракетными пусковыми установками 24 может осуществляться в полуавтоматическом режиме. При этом оператор, находящийся на стационарном ракетном пункте воздействия 2, по радиостанции 21 получает команды на запуск ракет. Руководствуясь данной командой, оператор с помощью пульта управления 34 вводит необходимую информацию о количестве запускаемых ракет и об углах их пуска в вычислитель 25, где формируются необходимые команды, осуществляющие запуск ракет в нужном направлении. После окончания воздействия, оператор сообщает на пункт управления активными воздействиями 1 о завершении операции воздействия.
При воздействии на облака с использованием мобильного пункта воздействия 3 координаты самолета от спутникового определителя координат 53 непрерывно поступают в вычислитель 42, откуда по каналам связи через устройства приема и телепередачи данных 35 и 6 поступают в процессор 11 вычислителя 7 пункта управления локатором и активными воздействиями 1. В процессоре 11 с учетом поступившей информации формируется картинка, отображающая самолет и прогнозируемый оптимальный его маршрут на фоне карты облачности с выделенной площадкой засева, которая передается на борт самолета с заданной частотой обновления. На борту самолета информация через устройство приема и телепередачи данных 35 поступает в вычислитель 42 блока управления 38, где обрабатывается соответствующим образом и отображается на цветном мониторе вычислителя 42 в виде динамической картинки, позволяющей оператору наблюдать визуально положение самолета на фоне облачной среды и площадок засева. Мобильный пункт воздействия, размещенный в данном случае на борту самолета, может функционировать как в автоматическом, так и в полуавтоматическом режиме.
При автоматическом режиме функционирования в вычислителе 42 блока управления 38 в зависимости от типа облачности формируется соответствующая команда на воздействие. При этом учитывается взаимное расположение площадки засева и самолета, а также их скорости перемещения в пространстве. Подлет самолета к площадке засева осуществляется строго по заданному оптимальному маршруту на фоне карты облачности. В зависимости от типа облаков и технологии воздействия приводится в действие соответствующее бортовое средство активных воздействий. Например, при воздействии на градовое облако самолет, двигаясь по заданному маршруту, выходит в заданную точку - точку начала воздействия. При достижении данной точки сигнал от вычислителя 42 поступает последовательно на цифроаналоговый преобразователь 44, усилитель мощности 45 и соответствующий исполнительный механизм 46, который приводит в действие бортовую ракетную установку 39. Если же воздействие на облака осуществляется с целью искусственного вызывания осадков, то используются другие средства воздействия, например устройство для распыления жидких хладореагентов в облачную среду 40, либо устройство для внесения гранул твердой углекислоты в облачную среду 41.
В особых ситуация, когда воздействие осуществляется на фидерные облака, не фиксирующие метеорадиолокатором 4, включение средств воздействий в режим работы осуществляется в полуавтоматическом режиме с пульта управления 43. При этом оператор, наблюдая за обстановкой визуально, оценивает ситуацию и с помощью пульта управления 43 вводит в вычислитель 42 соответствующие команды на включение тех, или иных бортовых средств воздействий.
Предложенная автоматизированная система отличается от известных систем высокой эффективностью и расширенными функциональными возможностями, поскольку представляется возможным наряду со стационарными ракетными пунктами воздействия использовать одновременно и мобильные пункты воздействия, сформированные на базе летательных аппаратов, либо наземных транспортных средств. Предложенная система позволяет полностью автоматизировать все процессы, связанные с активными воздействиями на облака и облачные системы с целью предотвращения градобитий и искусственного вызывания осадков в виде дождя.
В настоящее время заявленная автоматизированная система управления активными воздействиями на облака реализована и начаты производственные его испытания на базе Ставропольской военизированной службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2002 |
|
RU2213984C1 |
| АВИАЦИОННЫЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2005 |
|
RU2295742C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОТИВОГРАДОВОЙ ЗАЩИТЫ | 1994 |
|
RU2083999C1 |
| АВТОМАТИЗИРОВАННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ШТОРМООПОВЕЩЕНИЯ И АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2008 |
|
RU2395819C2 |
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| АВИАЦИОННОЕ УСТРОЙСТВО ВОЗДЕЙСТВИЯ НА ОБЛАЧНЫЕ ПРОЦЕССЫ | 2005 |
|
RU2314675C2 |
| Автоматизированная противоградовая ракетная пусковая установка | 2020 |
|
RU2738319C1 |
| ПРОТИВОГРАДОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 1995 |
|
RU2075921C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ЗАЩИТЫ ОТ ГРАДОБИТИЙ | 2008 |
|
RU2369088C1 |
| СПОСОБ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ГРАДОВЫЕ ОБЛАКА | 2009 |
|
RU2402195C1 |
Использование: для управления активными воздействиями на различные облака с целью предотвращения градобитий и вызывания осадков. Сущность: автоматизированная система управления содержит связанные между собой каналами коммуникационной связи командный пункт управления активными воздействиями, стационарный ракетный пункт воздействия и мобильный авиационный пункт воздействия. На командном пункте управления активными воздействиями размещен метеорадиолокатор с первым и вторым частотными каналами, а также каналами управления антенной по азимуту и углу места, а также система управления с вычислителем. На пункте воздействия размещены ракетная пусковая установка, блок дистанционного управления и второе устройство приема и телепередачи данных, сопряженное с блоком дистанционного управления пусковыми ракетными установками. Автоматизированная система содержит также мобильный пункт воздействия, в качестве которого используется самолет. На борту самолета установлены средства активных воздействий с механизмами ручного и автоматического управления. Технический результат: расширение функциональных возможностей и повышение эффективности. 1 ил.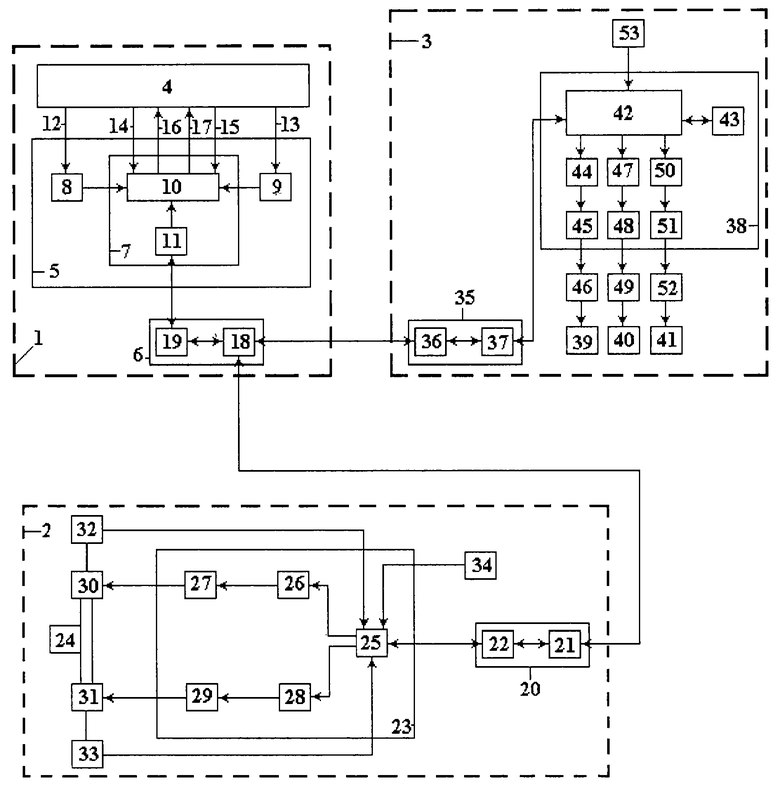
Автоматизированная система управления активными воздействиями на облака, содержащая размещенные на пункте управления активными воздействиями, метеорадиолокатор с первым и вторым частотными каналами, а также каналы управления антенной по азимуту и углу места, систему управления локатором и активными воздействиями, включающую вычислитель, связанный через аналого-цифровые преобразователи с выходами метеорадиолокатора и устройством приема и телепередачи данных, а также размещенные на стационарном ракетном пункте воздействия - второе устройство приема и телепередачи данных, и связанный с ним блок управления стрельбой, сопряженный с ракетными пусковыми установками, отличающаяся тем, что она содержит дополнительно размещенные на борту самолета либо другом транспортном средстве, средства активных воздействий, снабженные исполнительными механизмами, блок управления средствами активных воздействий, содержащий вычислитель, к каждому управляющему выходу которого подключены последовательно цифроаналоговый преобразователь и усилитель мощности, подключенный, в свою очередь, к входу исполнительного механизма соответствующего средства активного воздействия, при этом к первому входу вычислителя подключено устройство приема и телепередачи данных, а ко второму и третьему его входам подключены соответственно спутниковый определитель координат и пульт ручного управления.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОТИВОГРАДОВОЙ ЗАЩИТЫ | 1994 |
|
RU2083999C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 1996 |
|
RU2111646C1 |
| ПРОТИВОГРАДОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 1995 |
|
RU2075921C1 |
| АРТИЛЛЕРИЙСКИЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2172969C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |

