Изобретение относится к конструкции грузовых лебедок, используемых в грузоподъемных механизмах строительного, нефтедобывающего и горнодобывающего оборудования.
Известна конструкция грузовой лебедки, которая состоит из одного приводного гидродвигателя, соединенного с барабаном грузовой лебедки посредством редуктора с постоянным передаточным отношением, управляемого обратного клапана (гидрозамка), реверсивного гидрораспределителя и насоса с постоянным рабочим объемом, соединенного с приводным двигателем посредством коробки отбора мощности (КОМ) с постоянным передаточным отношением ("Стреловые самоходные краны". Отраслевой каталог. Научно-производственное и внешнеэкономическое объединение "Машмир", Москва, 1992 г., стр. 22-23, рис.3 и 4).
Недостатком данной конструкции является невозможность использования полной мощности приводного двигателя при подъеме грузов разного веса.
Из физики известно, что полезная мощность грузоподъемного механизма определяется произведением Nпол= P•V, где Р - вес поднимаемого груза; V - скорость подъема груза.
В такой конструкции изменять скорость V можно только меняя частоту вращения двигателя, но при этом изменяется мощность самого двигателя, а потому на меньших оборотах мощность двигателя недоиспользуется, что снижает скорость подъема, а значит производительность механизма. Указанный недостаток частично устранен в известной конструкции грузовой лебедки ("Оборудование и инструмент для ремонта скважин" авт. Бухаленко Е.И., Бухаленко В.Е., изд-во Москва, " Недра", 1991 г., стр. 105, рис. 5.11). В ней барабан лебедки соединен с приводным двигателем посредством фрикционной муфты 7 коробки перемены передач 22, имеющей четыре передачи для подъема груза с разной скоростью и коробки отбора мощности 3 с постоянным передаточным отношением.
В такой конструкции при работе приводного двигателя с постоянными, соответствующими предельной мощности оборотами, используя коробку перемены передач, возможно поднимать три различных груза с постоянной мощностью согласно соотношениям P1•V1= Р2•V2=Р3•V3, где V1, V2, V3 - скорости подъема, обеспечиваемые коробкой перемены передач, P1, P2, Р3 - вес поднимаемых грузов, соответствующий использованию максимальной мощности на соответствующих предельных скоростях.
Недостатком указанной конструкции является невозможность использования мощности приводного двигателя при подъеме грузов, отличающихся от значений Р1, P2 и Р3, что приводит к уменьшению скорости подъема, а также сложность управления такой конструкцией из-за наличия муфты сцепления, необходимой для переключения коробки перемены передач и технологического фрикционного тормоза, необходимого для удержания груза при выключенной муфте сцепления. Одновременность управления этими механизмами при начале подъема приводит к непроизводительным затратам мощности и увеличению технологического времени работы.
Все это приводит к снижению производительности труда оборудования и требует высокой квалификации оператора.
Изобретение направлено на повышение производительности механизма и упрощение приемов управления технологическим процессом.
Поставленная техническая задача достигается благодаря следующим решениям:
1. Насос привода имеет регулируемый рабочий объем и регулятор мощности, обеспечивающий автоматическое поддержание постоянного уровня отбираемой мощности в определенных пределах изменения веса поднимаемого груза.
2. Привод поворота барабана осуществляется несколькими гидромоторами, соединенными между собой таким образом, что в зависимости от веса груза они автоматически подключаются к напорной линии насоса последовательно, параллельно или смешанно, обеспечивая необходимую максимально допустимую скорость подъема груза после достижения верхнего или нижнего предела работы регулятора мощности насоса.
3. Автоматическое подключение выхода и входа каждого гидромотора осуществляется с помощью управляемых обратных клапанов, подключенных к выходам и входам соседних гидромоторов, разделенных между собой обратными клапанами. Управление гидроуправляемыми обратными клапанами осуществляется гидрораспределителями с электромагнитным управлением, каждый из которых управляет двумя гидрозамками одновременно. Гидромоторы при останове и спуске груза работают в насосном режиме с регулируемой угловой скоростью благодаря наличию клапана давления, управляемого со входа регулятором дроссельного типа (регулируемый дроссель).
Управление насосом позволяет останавливать барабан лебедки без расцепления силовой трансмиссии, а отсутствие коробки передач обеспечивает возможность работы привода лебедки без муфты сцепления и тормоза, что упрощает работу оператора.
Вместо фрикционного тормоза используются те же гидромоторы, работающие в насосном режиме, что позволяет регулировать режим спуска груза.
На фигуре показана принципиальная гидравлическая схема привода грузовой лебедки.
Грузовая лебедка содержит привод с приводным двигателем и барабан для наматывания каната (на фиг. не показаны). Привод содержит регулируемый насос поз. 1 с регулятором мощности, соединенного с приводным двигателем посредством коробки отбора мощности с постоянным передаточным числом, несколько гидромоторов, жестко соединенных с барабаном лебедки (в данном случае рассматривается схема с четырьмя гидромоторами поз. 11, 13, 17, 20), обратных клапанов поз. 8, 12, 16 и 19, управляемых обратных клапанов, в дальнейшем гидрозамков, поз. 15, 14, 18, 21, 23, 24, управляемого по обеим линиям управления со входа клапана давления поз. 9, гидрораспределителей с электромагнитным управлением поз. 2, 6 и 7, управляющих гидрозамками предохранительного клапана поз. 3, гидрораспределителя поз. 4, управляющего разгрузкой насоса, электроконтактного манометра поз. 39, контакты которого настроены на верхний и нижний предел работы регулятора мощности, дросселя 10, регулируемого дросселя поз. 22, обеспечивающего ручное управление режимом работы привода и расширительного бака 38, выравнивающего давление во всасывающей линии.
Схема обеспечивает три режима работы привода лебедки:
- подъем груза с постоянной предельной допустимой мощностью;
- удержание груза в неподвижном состоянии;
- опускание груза с регулируемой скоростью.
Работа системы происходит следующим образом.
При необходимости начать подъем груза оператор закрывает дроссель поз. 22 и включает электромагнит гидрораспределителя поз. 4. Масло от насоса по линии 25 через обратный клапан поз. 8 по линии 26 поступает в гидромотор поз. 11, далее по линии 29 через обратный клапан поз. 12 в гидромотор поз. 13, по линии 31, через обратный клапан 16 в гидромотор поз. 17, по линии 33 в обратный клапан поз. 19, по линии 34 в гидромотор поз. 20 и далее во всасывающую линию 28 и на вход гидронасоса, другие направления потока масла невозможны, т. к. в гидрозамках неуправляемые полости линий 30, 32, и 34 закрыты превышающим максимальным давлением в линии 26, а клапан давления поз. 9 закрыт пружиной при равенстве давлений в линиях управления 26 и 27.
Таким образом все гидромоторы вращаются с частотой, определяемой производительностью насоса, а она в свою очередь определяется величиной давления в линии 25 регулятором мощности. Его характеристика построена из условия Р•Q= const, где Р - давление в диапазоне Pmin - Рmax, Q - производительность в диапазоне Qmax - Qmin, при постоянной частоте вращения приводного двигателя максимальная скорость подъема будет достигнута при Рmin, что будет соответствовать минимальной полезной нагрузке. Если нагрузка достигнет величины соответствующей давлению Рmах, по сигналу от контактного манометра производится включение электромагнита гидрораспределителя поз. 7, который по линии 36 открывает гидрозамки 18 и 21, после чего поток масла делится на две части.
Первоначальный поток, описанный выше, через принудительно открытый клапан поз. 18 поступает в линию 28, а в гидромотор поз. 20 второй поток масла поступает по линии 34 через принудительно открытый гидрозамок поз. 21, оба потока разделены обратным клапаном поз. 19.
В связи с тем, что все гидромоторы жестко связаны с барабаном лебедки, они продолжают работать с одинаковой угловой скоростью, а значит оба потока равны. Таким образом, угловая скорость после включения уменьшается в два раза, а поскольку гидромотор поз. 20 имеет на выходе полное рабочее давление как и три остальных гидромотора, то суммарный крутящий момент увеличивается в два раза по отношению к предыдущему моменту.
Таким образом, справедливо выражение ω1•M1 = ω2•M2, где ω и М, соответственно, параметры работы лебедки в каждом из описанных режимах.
Нетрудно убедиться, что при включении гидрораспределителя 2, после открытия гидрозамков поз. 14 и 15, поток масла делится на три равные части и угловая скорость уменьшается в три раза, а момент возрастает ровно в три раза и т.д.
В конечном итоге, в результате управления такой схемой изменение угловой скорости и соответственное увеличение момента происходит во столько раз, сколько гидромоторов установлено в приводе.
Соответственно, при уменьшении нагрузки снижение давления ниже допустимого предела регулятора мощности приводит к появлению сигнала нижнего контакта манометра поз. 39 и последовательному отключению управляющих гидрораспределителей поз. 6, 7, 2, что в свою очередь приводит к закрытию гидрозамков, возрастанию угловой скорости гидромоторов и пропорциональному снижению крутящего момента на барабане лебедки.
В общем случае количество гидромоторов выбирается в зависимости от соотношения минимальной и максимальной полезных нагрузок и характеристики регулятора мощности конкретного насоса.
Для остановки лебедки оператор выключает гидрораспределитель поз. 4, после чего открывается предохранительный клапан поз. 3 и масло под низким давлением из линии 25 поступает в линию 28 и на вход насоса. Груз удерживается четырьмя гидромоторами, у которых в линиях 26, 30, 32 и 34 создается давление, пропорциональное нагрузке на лебедку.
Для опускания груза оператор плавно открывает дроссель поз. 22 и включает все гидрораспределители. По мере открытия дросселя поз. 22 масло из линии управления 27 поступает в линию 28, при этом на дросселе 10 имеет место понижение давления, клапан давления поз. 9 начинает открываться и масло из линии 26 непосредственно через клапан давления поступает в линию 28, начинается опускание груза. Гидромоторы в насосном режиме забирают масло из линии 28 через открытые гидрозамки по линиям 29, 31, 33, и 28. По мере открытия дросселя поз. 22 разность давлений в линиях 26 и 27 возрастает, клапан открывается, сопротивление его уменьшается и при постоянной нагрузке на лебедку увеличивается скорость опускания груза. Максимальная скорость опускания ограничена только максимальным числом оборотов гидромотора и не зависит от оборотов приводного двигателя. Линии 35, 37 соединены с соответствующими гидрозамками 23-24, 14, 15 и работают аналогично линии 36.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ПОЛОТНА ДОРОГИ | 1996 |
|
RU2110644C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ПОЛОТНА ДОРОГИ | 1998 |
|
RU2149237C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ | 2014 |
|
RU2553620C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2230020C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ГИДРОПРИВОД ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1991 |
|
RU2017903C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| ГИДРОПРИВОД КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2140388C1 |
Изобретение относится к грузоподъемным механизмам, в частности к лебедкам с гидроприводом. Грузовая лебедка содержит приводной двигатель, коробку отбора мощности с постоянным передаточным отношением и барабан для намотки грузового каната. Насос привода имеет регулятор мощности, а привод содержит несколько гидромоторов, соединенных между собой. Гидромоторы обеспечивают работу в насосном режиме для обеспечения регулирования режима спуска груза. Автоматическое подключение выхода и входа каждого гидромотора осуществляется с помощью обратных клапанов, подключенных к выходам и входам соседних гидромоторов. Управление обратными клапанами осуществляется гидрораспределителями с электромагнитным управлением, управляющим двумя гидрозамками. Гидромоторы при останове и спуске работают в насосном режиме с регулируемой угловой скоростью благодаря наличию клапана давления, управляемого со входа регулятора дроссельного типа. Управление насосом позволяет останавливать барабан лебедки без расцепления силовой трансмиссии. Изобретение обеспечивает повышение производительности и упрощение управления работой лебедки. 1 ил.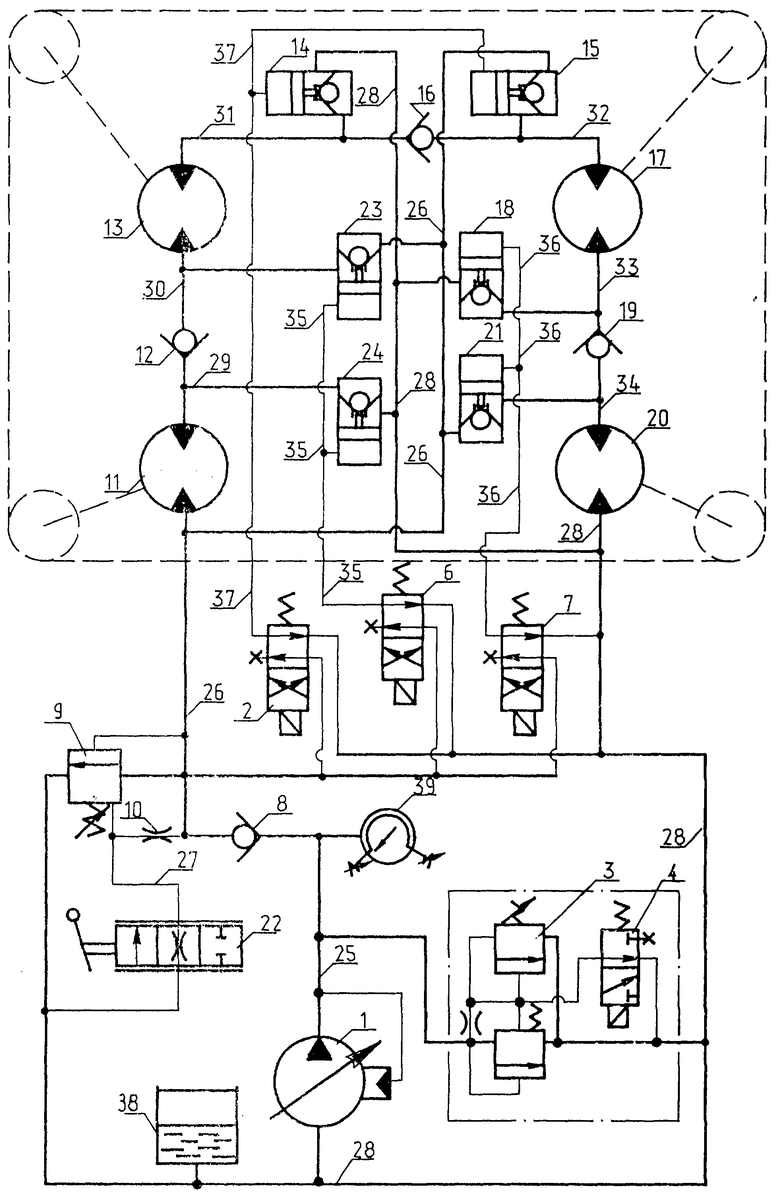
Грузовая лебедка, содержащая приводной двигатель, коробку отбора мощности с постоянным передаточным отношением и барабан для намотки грузового каната, отличающаяся тем, что к коробке отбора мощности приводного двигателя подключен насос с регулируемым рабочим объемом и регулятором мощности, обеспечивающий автоматическую передачу постоянной предельной мощности в заданном диапазоне давлений в нагнетательной линии, выход насоса через обратный клапан соединен со входом первого гидромотора, а выход последнего гидромотора соединен со всасывающей линией гидронасоса, все остальные гидромоторы соединены последовательно (выход со входом) друг с другом через обратные клапаны, причем выход каждого гидромотора, кроме последнего, соединен со входом соответствующего обратного клапана, а вход каждого гидромотора, кроме первого, соединен с выходом соответствующего обратного клапана, выход каждого гидромотора, кроме последнего, соединен с управляемой полостью соответствующего гидрозамка, а вход каждого гидромотора, кроме первого, соединен с неуправляемой полостью гидрозамка, каждая пара гидрозамков, подключенная к одному обратному клапану, своими линиями управления подключена к соответствующим гидрораспределителям с электромагнитным управлением для соединения ее с нагнетательной линией или всасывающей линией, все гидрозамки, у которых управляемые полости подключены к выходам гидромоторов, своими неуправляемыми полостями подключены к всасывающей линии, а гидрозамки, которые своими неуправляемыми полостями подключены к входам гидромоторов, своими управляемыми полостями подключены к нагнетательной линии, вход первого гидромотора подключен также к входу клапана давления, управляемого со входа по двум линиям управления, причем между полостью управления клапана давления со стороны пружины и его входом установлен дроссель, выход которого соединен со входом регулируемого дросселя, причем выход последнего соединен с выходом клапана давления и всасывающей линией.
| Приспособление к ткацким станкам для автоматической смены шпуль по израсходовании или обрыве уточной нити | 1927 |
|
SU11259A1 |
| БУХАЛЕНКО Е.И., БУХАЛЕНКО В.Е | |||
| Оборудование и инструмент для ремонта скважин, - М.: Недра, 1991, с.105, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 3698690 А, 17.10.1972 | |||
| ШАГОВЫЙ ПОДЪЕМНИК | 1991 |
|
RU2027661C1 |

