Изобретение относится к гидравлическим системам судовых кранов.
Известна система крана [патент RU №2087408 C1, B 66 С 13/42, 20.08.1997 "Гидропривод стрелового самоходного крана"], содержащая основные насосы, подключенные через золотниковые гидрораспределители с гидроуправлением к гидромоторам и гидроцилиндрам крановых механизмов, вспомогательный насос, соединенный через обратный клапан с блоком клапанов с гидроаккумулятором.
Известна также система судового крана [патент RU №2020300 C1, B 66 С 13/18, 30.09.1994 "Электрогидравлическая система грузоподъемного крана"], содержащая размещенную в корпусе крана насосную станцию с электроприводным устройством, валы которого соединены с валами четырех насосов. Каждый насос подключен к гидродвигателям вылета стрелы, поворота и двум гидродвигателям механизма грузовой лебедки.
Недостатками известных систем является то, что кран осуществляет работу только в одном режиме (подъем, перемещение, опускание грузов).
Известна гидравлическая система устройства для передачи грузов в море по техническим условиям "Устройства для передачи сухих грузов в море BI-I,0", 1989 г. [ЛИКА. 364311.001 ТУ], содержащая гидромоторы тяговой лебедки с механическим дифференциалом для обеспечения компенсации качки судов, пневмогидроаккумуляторы, гидроцилиндр механизма подъема принимающей головки, соединенные с насосным агрегатом. Недостатками известной системы являются большая энергоемкость, большие габаритные размеры, инерционность дифференциальной лебедки, а также необходимость дополнительного оборудования на принимающем судне.
Наиболее близкой по совокупности признаков гидравлической системой к заявленной является гидравлическая система «Судового грузового устройства для безударной передачи груза в море» (SU 1255508 А1, 07.09.1986), содержащая гидроцилиндр подъема груза, связанный одним концом со стрелой устройства, грузовой полиспаст, подвижная ось которого связана со вторым концом гидроцилиндра подъема груза, следящую систему, включающую грузовую и следящую лебедки, на барабаны которых заведены соответственно грузовой и следящий канаты, а также приводы этих лебедок и механизм аварийного останова груза при обрыве следящего каната, при этом следящая система включает гидромотор с гидросистемой, приводы грузовой и следящей лебедок выполнены также в виде гидромоторов с гидросистемами, содержащими гидрораспределители, а гидромотор следящей системы механически связан с гидромотором следящей лебедки, который, в свою очередь, гидравлически сообщен с гидромотором грузовой лебедки через их гидрораспределители.
Недостатками известной гидравлической системы являются:
- обеспечение судового крана только операциями подъема и опускания груза без слежения и со слежением за палубой принимающего судна;
- отсутствие компонентов (приводов) для перемещения груза вдоль палубы (изменение вылета стрелы и поворота крана) и для осуществления траверзной передачи грузов.
Заявляемое изобретение направлено на устранение вышеперечисленных недостатков, а именно на создание гидравлической системы судового крана полноповоротного с изменяющимся вылетом стрелы, способного осуществлять траверзную передачу грузов, который может осуществлять работу в трех режимах:
- в режиме работы крана без слежения;
- в режиме работы крана со слежением за пирсом или за палубой ошвартованного борт в борт принимающего судна в условиях волнения моря;
- в режиме траверзной передачи грузов (перемещение грузов по канатной дороге на стоянке либо на ходу при движении судов параллельными курсами на расстоянии 30-60 м друг от друга в условиях волнения моря, с обеспечением безопасной передачи грузов).
Техническим результатом при осуществлении изобретения является обеспечение надежности, удобства и простоты в эксплуатации гидравлической системы управления судовым краном как в режиме работы полноповоротного крана с изменением вылета стрелы, так и в режиме передающего устройства для траверзной передачи грузов между судами при использовании тележки, а также возможности управления следящей лебедкой крана при формировании канатной дороги для тележки. Причем переход с одного режима на другой осуществляется без переналадки и дополнительной регулировки за минимальное время. В режиме траверзной передачи грузов система автоматического реагирования на возмущающие условия качки поддерживает постоянным натяжение в канатной дороге. При этом обеспечиваются удобство и безопасность передачи грузов в море и исключается необходимость оснащения судов дополнительным оборудованием.
Указанный технический результат при осуществлении изобретения достигается тем, что известная система, содержащая гидромотор привода грузовой лебедки, соединенный с грузовым барабаном этой лебедки, и гидромотор следящей лебедки, подключенные каждый посредством магистралей через золотниковые распределители к насосному агрегату, и пневмогидроаккумулятор, снабжена новыми конструктивными элементами, их взаимным расположением и связями между ними, а именно: с пневмогидроаккумулятором гидравлически соединены гидроцилиндры приводов основной секции стрелы и хобота стрелы, образующие привод изменения вылета стрелы, гидромотор привода поворота крана, гидромотор привода грузовой лебедки, соединенный с грузовым барабаном, и гидромотор этого привода, который соединен с натяжным барабаном, входящим в конструкцию грузовой лебедки, и привод стопора тележки, перемещаемой в режиме траверзной передачи грузов с одного судна на другое и фиксируемой упомянутым стопором на ноке стрелы, при этом система снабжена делителем потока, состоящим из двух гидромоторов, через который гидромоторы грузовой лебедки подключены к упомянутому пневмогидроаккумулятору, и баком с наддувом, соединенным с насосом постоянной подачи, которым дополнен насосный агрегат, и с гидромоторами грузовой лебедки.
Применение в режиме траверзной передачи грузов делителя потока, обеспечивающего синхронное вращение барабанов грузовой лебедки, приводит к уменьшению массы и габаритов устройства, снижению энергоемкости (потребляемой мощности) и инерционности системы по сравнению с известным устройством для траверзной передачи грузов. Наличие в системе пневмогидроаккумулятора, к которому подключен газовый баллон, и бака с наддувом обеспечивает поддержание постоянного давления в системе, за счет использования насоса малой производительности, а также поддержание постоянного натяжения в канатной дороге при передаче грузов траверзным способом в условиях волнения моря. Дополнительный натяжной барабан грузовой лебедки совместно с грузовым барабаном служит для осуществления траверзной передачи грузов. Гидромотор привода поворота крана обеспечивает перемещение груза вдоль палубы судна и вокруг оси крана, а также служит для изменения угла между канатной дорогой и диаметральной плоскостью судна в режиме траверзной передачи в случае относительного смещения судов. Цилиндры привода изменения вылета стрелы обеспечивают перемещение груза в плоскости стрелы в режиме работы крана и режиме траверзной передачи, изменяя расстояние от оси поворота крана до груза и от палубы до груза (по высоте). Цилиндры привода хобота позволяют опускать контейнер с грузом на палубу передающего судна даже в условиях минимальной площади палубы, упростить обслуживание и ремонт шкивов, а также переоснащать кран для работы в режиме траверзной передачи грузов из режима крана и обратно.
При исследовании отличительных признаков описываемой системы не выявлено каких-либо известных аналогичных решений по использованию в режиме траверзной передачи гидромашинного делителя потока для поддержания постоянного натяжения канатной дороги, пневмогидроаккумулятора, второго барабана грузовой лебедки с независимым гидромотором, обеспечивающих траверзную передачу грузов, а также применению следящей лебедки не только в режиме работы крана со слежением, но и при траверзной передаче грузов, как вспомогательное средство при постановке канатной дороги и для измерения расстояния между судами.
Сущность изобретения поясняется фиг.1-3, где
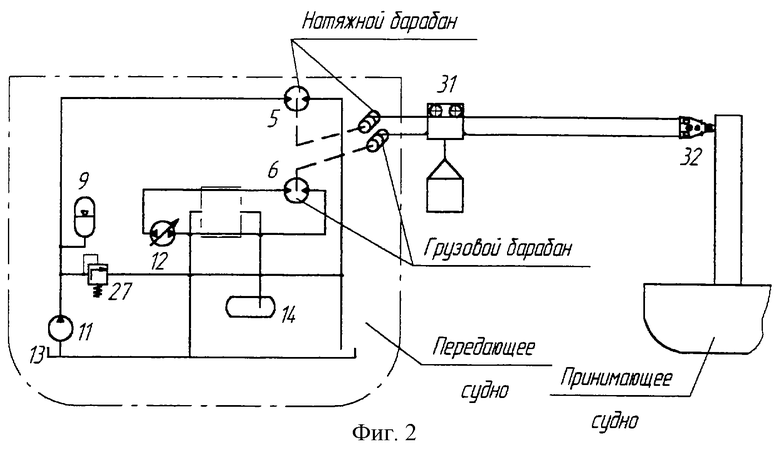
на фиг.1 представлена принципиальная схема гидравлической системы судового крана;
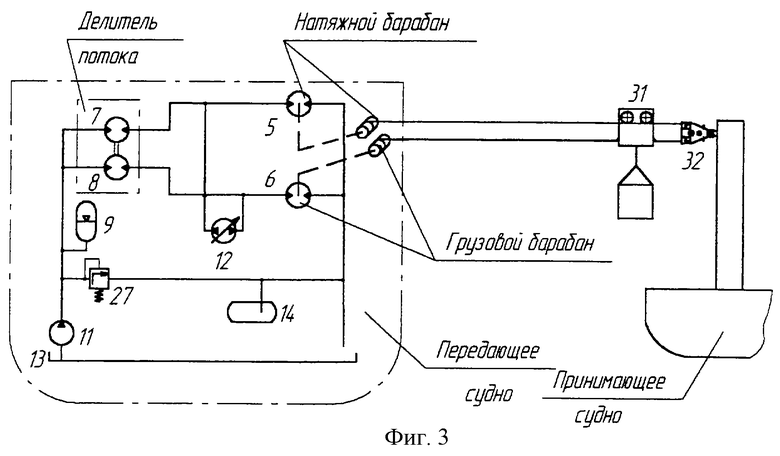
на фиг.2 представлена упрощенная схема работы системы у передающего судна;
на фиг.3 представлена упрощенная схема работы системы у принимающего судна.
В варианте осуществления изобретения гидравлическая система используется в универсальном судовом электрогидравлическом кране «Универсал», предназначенном для погрузо-разгрузочных работ, а также передачи грузов траверзным способом на ходу с судна на судно или стационарный объект (буровую платформу) на расстояние до 60 м при волнении моря до 4 баллов. Гидравлическая система крана состоит из:
- привода поворота;
- привода грузовой лебедки;
- привода лебедки слежения;
- привода изменения вылета стрелы, состоящего из привода хобота и привода основной секции стрелы;
- привода стопора тележки.
Гидросистема включают в себя:
1 - гидроцилиндр привода хобота;
2 - гидроцилиндр привода основной секции стрелы;
3 - гидромотор привода поворота;
4 - гидромотор привода лебедки слежения;
5 - гидромотор натяжного барабана привода грузовой лебедки;
6 - гидромотор грузового барабана привода грузовой лебедки;
7 и 8 - гидромоторы делителя потока;
9 - пневмогидроаккумулятор;
10 - газовый баллон;
11 - насос постоянной подачи;
12 - насос переменной подачи;
13 - бак;
14 - бак с наддувом;
15÷26 - распределители;
27 - предохранительный клапан;
28÷30 - тормозные клапаны;
31 - грузовая тележка;
32 - принимающий блок.
Гидравлическая система обеспечивает работу приводов крана в трех режимах:
- в режиме работы крана без слежения;
- в режиме работы крана со слежением за пирсом или за палубой ошвартованного борт в борт принимающего судна;
- в режиме траверзной передачи грузов.
В исходном положении сигнал на гидрораспределитель 26 отсутствует. Гидравлический сигнал от системы управления через гидрораспределитель 26 не поступает на распределители 23, 24, 25. Моторы грузового и натяжного барабанов отсоединены от насоса 12. Насос 12 выведен на нулевую подачу.
Питание на привод стопора тележки не подается, тележка застопорена в ноке крана. Давление разгрузки на предохранительном клапане 27 отсутствует. Насос 11 готов к зарядке пневмогидроаккумулятора 9.
Управляющий сигнал на гидрораспределители 15 и 16 отсутствует, питание в полости гидроцилиндров 1 и 2 от пневмогидроаккумулятора 9 не поступает. Поршневая полость гидроцилиндра 2 заперта гидрозамком тормозного клапана 30, а поршневая и штоковые полости гидроцилиндра 1 - гидрозамками тормозных клапанов 28 и 29.
Управляющий сигнал на гидрораспределители 17 и 18 отсутствует, питание на гидромотор 3 привода поворота и на гидромотор 4 привода следящей лебедки от пневмогидроаккумулятора 9 не поступает.
Управляющие гидравлические сигналы на распределители 20 и 21 отсутствуют, гидромотор 5 привода грузовой лебедки отсоединен от пневмогидроаккумулятора 9.
Ввиду отсутствия управляющих сигналов на гидрораспределителях 19, 22, и 23 делитель потока не задействован. Давление в контуре управления отсутствует. Механизмы изменения вылета, поворота стрелы, следящая и грузовая лебедки застопорены нормально замкнутыми тормозами.
Гидравлическое питание всех приводов обеспечивается от насосного агрегата, состоящего из электродвигателя (не показан), и двух насосов: 11 - насос постоянной подачи и 12 - насос переменной подачи.
Устройство работает следующим образом.
Насос 11 постоянной подачи обеспечивает поддержание постоянного давления в гидравлической системе. При разгрузке насоса 11 вся его подача направляется через предохранительный клапан 27 в бак с наддувом 14. По мере расхода рабочей жидкости давление в гидравлической системе падает, и по сигналу нижнего предела рабочая жидкость от насоса 11 поступает на зарядку пневмогидроаккумулятора 9 с газовым баллоном 10.
От пневмогидроаккумулятора 9 осуществляется гидравлическое питание гидромотора 3 привода поворота через распределитель 17, а через распределитель 16 и тормозной клапан 30 поток направляется в поршневую полость цилиндра 2 привода основной секции стрелы, при этом через распределитель 15 и тормозной клапан 28 поток направляется в поршневую либо через тормозной клапан 29 в штоковую полость цилиндра 1 привода хобота стрелы. Слив потока рабочей жидкости из поршневой полости цилиндра 2 привода основной секции стрелы поступает на тормозной клапан 30, который обеспечивает удержание стрелы при ее опускании.
Насос 12 регулируемой подачи обеспечивает привод грузового барабана через распределитель 25 или натяжного барабана через распределитель 24 по замкнутому контуру.
Гидравлическая система в зависимости от режима обеспечивает работу следующим образом:
в режиме работы крана без слежения гидромотор 6 грузового барабана подсоединяется через распределитель 25 по замкнутому контуру к насосу 12;
для обеспечения режима работы крана со слежением в составе гидравлической системы предусматривается следящая лебедка. Сельсин, установленный на валу лебедки, дает сигнал в систему управления грузовым барабаном;
при работе в режиме траверзной передачи грузов осуществляется бесконтактный способ передачи грузов с одного судна на другое, при котором перемещение грузов происходит по натянутым между судами канатам посредством грузовой тележки 31 (фиг.2, фиг.3).
Работа следящей лебедки в режиме траверзной передачи грузов заключается в передаче принимающего блока 32 (фиг.2, фиг.3) с пропущенным через его шкив несущим канатом по канату следящей лебедки, а затем в измерении расстояния между судами и передаче информации на пульт управления краном.
Установка канатной дороги осуществляется следующим образом. Сначала проводится подготовительная работа: снимается грузовая подвеска, несущий канат проводится через ролики тележки в принимающий блок 32 через его шкив и крепится к грузовой тележке 31. Грузовой канат также крепится к тележке 31. На принимающее судно выстреливается линь-проводник, к концу которого на передающем судне закрепляется конец каната следящей лебедки. Поток от пневмогидроаккумулятора 9 через распределитель 18 подается на гидромотор 4 привода следящей лебедки. Следящая лебедка снимается с тормоза, гидромотор 4 переключается на малый рабочий объем и свободно травит канат. Команда принимающего судна выбирает линь и закрепляет конец каната следящей лебедки.
Следящая лебедка переводится в режим дороги: устанавливается полный рабочий объем гидромотора 4, лебедка выбирает слабину каната.
Принимающий блок 32 с несущим канатом вспомогательным линем перетягивается командой на принимающее судно по канату следящей лебедки. В это время гидромотор 5 свободно вращается, подавая рабочую жидкость по кольцу, включающему распределитель 20, с подпиткой от бака с наддувом 14. После закрепления принимающего блока 32 на принимающем судне управляющий гидравлический сигнал подается на распределитель 21 и на распределитель 20. Это приводит к снятию закольцовки гидромотора 5 и подключению его к пневмогидроаккумулятору 9. Натяжной барабан выбирает слабину несущего каната с ограничением скорости вращения гидромотора 5 (элемент ограничения скорости не показан). При натяжении дороги возрастает давление в системе, что приводит к снятию ограничения скорости вращения гидромотора 5. Натяжной барабан работает в режиме автоматического натяжения каната, обеспечивая его выбирание и травление в зависимости от волнения моря и, соответственно, качки судов.
Одновременно подается электрический сигнал на гидромотор 4, что приводит к переключению рабочего объема и к снижению натяжения каната следящей лебедки. Следящая лебедка отслеживает изменение расстояния между судами.
Для перемещения грузовой тележки у передающего судна (фиг.2) гидромотор 6 грузового барабана подсоединяется по замкнутому контуру к насосу 12.
При этом скорость тележки 31 задается только грузовым барабаном, что обеспечивает удержание тележки при остановке на постоянном расстоянии от передающего судна, а также безударный подход-отход.
После того как тележка 31 состыковалась с ноком стрелы, подается поток рабочей жидкости в цилиндры привода стопора тележки, который фиксирует тележку в ноке стрелы, затем подается электросигнал на гидромотор 5, который переключается на малый рабочий объем, что обеспечивает уменьшение натяжения дороги.
После чего груз (контейнер) может быть опущен, поднят, перемещен в требуемое место на палубе управлением цилиндрами 1 и 2 приводов изменения вылета стрелы и гидромотора 3 привода поворота, что обеспечивает изменение вылета стрелы и поворот крана.
При этом груз подвешен к крану через постоянно состыкованную с ноком стрелы тележку 31, и поворот крана ограничен отходящими от тележки 31 канатами дороги.
Для перемещения грузовой тележки у принимающего судна (фиг.3) производится остановка грузовой тележки 31 и переключение режима в системе управления после отхода грузовой тележки 31 от передающего судна на безопасное расстояние.
При этом (фиг.1):
- снимается питание с электромагнита распределителя 26, распределитель 25 принимает исходное положение и отсекает гидромотор 6 от насоса 12;
- снимается грузовой барабан с тормоза;
- производится переключением распределителей 22, 23 и 19 подключение гидромоторов 5 и 6 натяжного и грузового барабанов привода грузовой лебедки к пневмогидроаккумулятору 9 через делитель потока, а также подключение гидромоторов 5 и 6 к двум разным полостям насоса 12.
Подключение гидромоторов 5 и 6 через делитель потока к пневмогидроаккумулятору 9 обеспечивает синхронное вращение грузового и натяжного барабанов с целью отслеживания изменения длины дороги, что обеспечивает удержание тележки 31 на постоянном расстоянии от принимающего судна при ее остановке, а также безударный подход-отход.
Управление перемещением тележки 31 относительно принимающего судна осуществляется рукояткой управления грузовым барабаном. При этом насос 12 перекачивает гидравлическую жидкость из полости гидромотора 5 в полость гидромотора 6 или обратно, что приводит к относительному перемещению натяжного и грузового барабанов и движению тележки в сторону передающего или принимающего судна.
Привод стопора тележки служит для механического соединения тележки 31 с ноком крана. После соединения тележки 31 с ноком крана (на схеме не показано) происходит опускание тележки 31 на палубу с помощью гидроцилиндров (1 и 2) основной секции и хобота стрелы. Тележка гидравлически расстопоривается по команде оператора (происходит размыкание), после чего оператор дает команду на перемещение тележки к принимающему судну.
Таким образом, на основании вышеизложенного можно сделать следующие выводы:
- гидравлическая система предназначена для использования в универсальном судовом кране;
- для заявленной системы подтверждена возможность ее осуществления с помощью известных вышеописанных средств;
- преимущество технического решения, изложенного в предлагаемом изобретении, состоит в том, что с его помощью можно осуществлять краном траверзную передачу грузов, т.е. осуществлять его работу в трех режимах: работа крана без слежения, работа крана со слежением и траверзная передача грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО к СУДОВЫМ КРАНАМДля | 1969 |
|
SU247814A1 |
Изобретение относится к гидравлическим системам судовых кранов. Согласно изобретению в гидравлической системе с пневмогидроаккумулятором гидравлически соединены гидроцилиндры приводов основной секции стрелы и хобота стрелы, образующие привод изменения вылета стрелы, гидромотор привода поворота крана, гидромотор привода грузовой лебедки, соединенный с грузовым барабаном, и гидромотор этого привода, который соединен с натяжным барабаном, входящим в конструкцию грузовой лебедки, и привод стопора тележки, перемещаемой в режиме траверзной передачи грузов с одного судна на другое и фиксируемой упомянутым стопором на ноке стрелы. Система снабжена делителем потока, состоящим из двух гидромоторов, через который гидромоторы грузовой лебедки подключены к упомянутому пневмогидроаккумулятору, и баком с наддувом, соединенным с насосом постоянной подачи, которым дополнен насосный агрегат, и с гидромоторами грузовой лебедки. Изобретение позволяет обеспечить повышение надежности. 3 ил.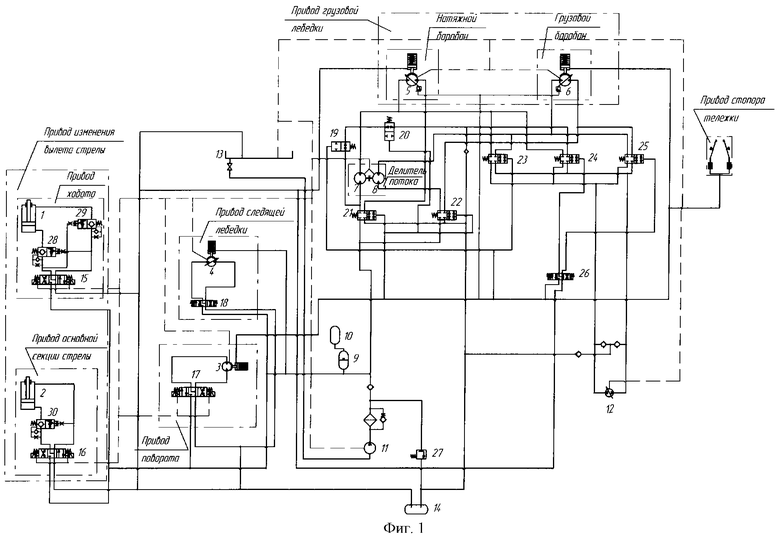
Гидравлическая система судового крана, содержащая гидромотор привода грузовой лебедки, соединенный с грузовым барабаном этой лебедки, и гидромотор следящей лебедки, подключенные каждый посредством магистралей через золотниковые распределители к насосному агрегату, и пневмогидроаккумулятор, отличающаяся тем, что с пневмогидроаккумулятором гидравлически соединены гидроцилиндры приводов основной секции стрелы и хобота стрелы, образующие привод изменения вылета стрелы, гидромотор привода поворота крана, гидромотор привода грузовой лебедки, соединенный с грузовым барабаном, и гидромотор этого привода, который соединен с натяжным барабаном, входящим в конструкцию грузовой лебедки, и привод стопора тележки, перемещаемой в режиме траверзной передачи грузов с одного судна на другое и фиксируемой упомянутым стопором на ноке стрелы, при этом система снабжена делителем потока, состоящим из двух гидромоторов, через который гидромоторы грузовой лебедки подключены к упомянутому пневмогидроаккумулятору, и баком с наддувом, соединенным с насосом постоянной подачи, которым дополнен насосный агрегат, и с гидромоторами грузовой лебедки.
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| US 3543946 А, 01.12.1970. | |||

