Изобретение относится к машиностроению, в частности к подъемно-транспортному оборудованию, и касается устройств для подъема длинномерных тяжеловесных объектов в вертикальное положение.
Известен привод гидравлической системы с независимым регулированием подачи жидкости на входе и выходе из привода по патенту US 6976418 ВВ (F15B 11/024, 2004 г.). Гидравлическая система содержит два независимо регулируемых привода, каждый из которых снабжен двумя независимо управляемыми клапанами, регулирующими подачу и выпуск жидкости из одного конца привода, а также двумя независимо управляемыми клапанами, регулирующими подачу и выпуск жидкости из другого конца привода (по существу - из штоковой и поршневой полостей исполнительного гидроцилиндра). Изменение направления подачи жидкости от одного конца привода к другому выполняют путем блокирования выпуска жидкости в резервуар одним из независимо управляемых клапанов и направления потока жидкости к другому клапану, обеспечивающему сообщение другого конца привода с магистралью насоса.
Однако в известном приводе не предусмотрена возможность компенсации переменной весовой нагрузки.
Известна система, компенсирующая действие веса на подвижный поршневой шток гидроцилиндра по патенту DE 10351126 В3 (F15B 21/08, 2003 г.). Известная система содержит электронный управляющий блок, регулирующий в соответствии с приложенным весом многоканальный клапан, подающий жидкость под давлением к одной стороне гидроцилиндра. В соответствии с сигналами датчика электронный управляющий блок определяет действующий на гидроцилиндр вес и рассчитывает определенное значение компенсирующего сигнала, используемого для регулирования многоканального клапана регулирования давления.
Однако известная система является достаточно сложной, и ее работа зависит от надежности многоканального клапана, электронного управляющего блока, от сигналов датчика.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод, приведенный в патентном описании RU 2304668 C1 (E02F 9/22, 2006 г.). В варианте осуществления изобретения известное устройство предназначено для уравновешивания силы тяжести рабочего оборудования стреловой машины. Гидравлический привод содержит гидроцилиндр поворота, средство для компенсации переменной весовой нагрузки на шток гидроцилиндра поворота в зависимости от угла поворота (наклона) рабочего оборудования (по существу - стрелы колесного экскаватора) и насосный агрегат с баком, включающий гидронасос. Насосный агрегат через трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота. Гидроцилиндр поворота шарнирно соединен соответственно с основанием стреловой машины и стрелой, которая шарнирно закреплена на упомянутом основании с возможностью поворота в вертикальной плоскости. Средство для компенсации переменной весовой нагрузки на шток гидроцилиндра поворота в зависимости от угла поворота (наклона) рабочего оборудования включает уравновешивающий пневмогидроцилиндр, поршневая полость которого соединена с газовым баллоном. Гидроцилиндр поворота и уравновешивающий пневмогидроцилиндр установлены параллельно и сближены относительно продольной плоскости симметрии рабочего оборудования. Подобный гидравлический привод, обеспечивающий уравновешивание силы тяжести, может быть использован в качестве гидравлического привода кантователя.
Однако известный гидравлический привод содержит пневмогидроцилиндр с газовым баллоном, находящиеся под давление сжатого газа, что снижает безопасность эксплуатации. Кроме того, в известном приводе не предусмотрена возможность регулирования скорости перемещения штока исполнительного гидроцилиндра поворота, что важно при работе привода кантователя, например, на предельном угле поворота (подъема) объекта.
Задача, решаемая изобретением, заключается в создании гидравлического привода с переменной весовой нагрузкой на гидроцилиндр, обеспечивающего повышение надежности и безопасности эксплуатации.
Указанная задача решается тем, что в гидравлическом приводе кантователя с поворотной подъемной платформой, содержащем по меньшей мере один гидроцилиндр поворота, средство для компенсации переменной нагрузки на шток гидроцилиндра поворота в зависимости от угла поворота упомянутой платформы и насосный агрегат с баком, включающий по меньшей мере один гидронасос, причем насосный агрегат через первый трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота, последний шарнирно соединен соответственно с основанием кантователя и поворотной подъемной платформой, которая шарнирно закреплена на основании кантователя с возможностью поворота в вертикальной плоскости, согласно изобретению средство для компенсации переменной нагрузки на шток гидроцилиндра поворота включает регулятор давления с обратным клапаном, регулируемый по давлению срабатывания в зависимости от угла поворота упомянутой платформы. При этом гидравлический привод дополнительно содержит второй трехпозиционный гидрораспределитель с электромагнитным управлением, первый и второй односторонние гидрозамки, регулятор расхода с обратным клапаном и дроссель путевой, который кинематически связан с поворотной подъемной платформой. Напорная магистраль, связывающая насосный агрегат с гидроцилиндром поворота, имеет возможность сообщения с поршневой полостью гидроцилиндра поворота через второй трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции через первый односторонний гидрозамок, регулятор расхода с обратным клапаном и дроссель путевой, а также имеет возможность сообщения со штоковой полостью гидроцилиндра поворота через второй трехпозиционный гидрораспределитель с электромагнитным управлением в другой его позиции через второй односторонний гидрозамок и регулятор давления с обратным клапаном.
Вместе с этим регулятор давления с обратным клапаном кинематически связан с поворотной подъемной платформой.
Кроме того, гидравлический привод содержит гидроблок для опускания поворотной подъемной платформы вручную, который через магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота и с насосным агрегатом с баком. Упомянутый гидроблок включает по меньшей мере один ручной насос, регулируемый вентиль, предохранительный клапан, а также первый, второй и третий обратные клапаны. Первый обратный клапан имеет гидравлическое сопротивление большее, чем гидравлическое сопротивление второго обратного клапана. Второй и третий обратные клапаны выполнены одинаковыми. При этом вход регулируемого вентиля гидравлически связан с поршневой полостью гидроцилиндра поворота, а выход - с входами первого и второго обратных клапанов. Выход второго обратного клапана гидравлически связан через предохранительный клапан с дополнительно введенной сливной магистралью, а также гидравлически связан со штоковой полостью гидроцилиндра поворота и с выходом третьего обратного клапана. Вход третьего обратного клапана гидравлически связан с напорной магистралью ручного насоса гидроблока. Выход первого обратного клапана через последнюю упомянутую сливную магистраль сообщен с баком насосного агрегата, причем эта сливная магистраль является одновременно магистралью для забора рабочей жидкости из бака насосного агрегата с помощью ручного насоса гидроблока.
В варианте выполнения насосный агрегат с баком содержит ручной насос, напорная магистраль которого имеет возможность сообщения с напорной магистралью ручного насоса гидроблока посредством съемной магистрали.
В последнем варианте выполнения съемная магистраль может быть выполнена в виде гибкого рукава.
В другом варианте выполнения гидравлический привод снабжен вторым гидроцилиндром поворота, который установлен параллельно первому гидроцилиндру поворота и шарнирно соединен соответственно с основанием кантователя и поворотной подъемной платформой. При этом второй гидроцилиндр поворота сообщен с насосным агрегатом через упомянутые регулятор давления с обратным клапаном, дроссель путевой и гидроблок для опускания поворотной подъемной платформы вручную.
Технический результат использования изобретения состоит в том, что оно позволяет повысить надежность и безопасность привода. Вместе с этим использование изобретения позволяет значительно повысить эффективность гидравлического привода за счет снижения затрачиваемой мощности на подъем поворотной подъемной платформы с объектом благодаря применению регулятора давления, регулируемого по давлению срабатывания в зависимости от угла поворота поворотной подъемной платформы, автоматически настраивающегося в соответствии с нагрузкой от условно отрицательного момента силы тяжести, появляющегося на гидроцилиндре в период поворота (подъема) поворотной подъемной платформы.
На фиг.1 представлена принципиальная схема гидравлического привода кантователя с поворотной подъемной платформой; на фиг.2 схематично показан кантователь с гидроцилиндром поворота поворотной подъемной платформы и насосным агрегатом, общий вид сбоку; на фиг.3 - то же, в поднятом положении поворотной подъемной платформы (без кантуемого объекта); на фиг.4 - устройство дросселя путевого и его кинематическая связь с поворотной подъемной платформой кантователя, начальный момент поворота (подъема) поворотной подъемной платформы, дроссель путевой показан в продольном разрезе; на фиг.5 - то же, когда поворотная подъемная платформа находится в поднятом положении до упора в гидроцилиндрах поворота (угол поворота платформы ~ 100°); на фиг.6 - устройство регулятора давления с обратным клапаном и его кинематическая связь с поворотной подъемной платформой кантователя, начальный момент поворота (подъема) поворотной подъемной платформы, регулятор давления с обратным клапаном показан в продольном разрезе; на фиг.7 - то же, когда поворотная подъемная платформа находится в поднятом положении до упора в гидроцилиндрах поворота (угол поворота платформы ~ 100°); на фиг.8 - диаграмма изменения настройки по давлению срабатывания регулятора давления с обратным клапаном в зависимости от угла поворота (подъема) поворотной подъемной платформы в диапазоне углов от 0° до 100°. На диаграмме: Р - давление, α - угол поворота поворотной подъемной платформы.
В варианте осуществления изобретения гидравлический привод используется в кантователе с поворотной подъемной платформой. Кантователь содержит основание 1, на котором с возможностью поворота в вертикальной плоскости шарнирно закреплена снабженная, например, двумя параллельно установленными гидроцилиндрами 2 поворота поворотная подъемная платформа 3 для длинномерных конструкций. Гидроцилиндр поворота - двустороннего действия. Каждый гидроцилиндр поворота шарнирно соединен соответственно с основанием 1 кантователя и поворотной подъемной платформой 3. На основании кантователя смонтирован насосный агрегат 4 с баком 5. Насосный агрегат (насосная станция) включает гидронасосы 6 и 7 одинаковой производительности. В варианте осуществления изобретения один из гидронасосов дублирует другой гидронасос. Каждый гидронасос имеет клапан разгрузки соответственно 8 и 9, который управляется трехпозиционным гидрораспределителем 10 с электромагнитным управлением (МГ1 и МГ2) типа ГА-163Т/16, ГА-163СТУ (со схемой распределения потока 34).
Насосный агрегат содержит ручной насос 11, напорную 12 и сливную 13 магистрали, фильтры напорные 14 и 15, сливной фильтр 16, блокировочные обратные клапаны 17, 18 и 19, предохранительный клапан 20, вентили 21 и 22, а также снабженный заглушкой 23 штуцер для подсоединения гибкого рукава высокого давления (на чертеже не показано) к ручному насосу 11. Гидравлический привод содержит второй трехпозиционный гидрораспределитель 24 с электромагнитным управлением (МГ1 и МГ2) типа ГА-144, ГА-144СТУ (со схемой распределения потока 34). Гидрораспределитель 24 соединен с напорной магистралью 12 и через блокировочный обратный клапан 25 - со сливной магистралью 13.
Кроме того, гидрораспределитель 24 гидравлически связан со штоковыми и поршневыми полостями гидроцилиндров 2 поворота посредством односторонних гидрозамков соответственно 26 и 27. Между односторонним гидрозамком 27 и поршневыми полостями гидроцилиндров 2 поворота последовательно установлены регулятор 28 расхода с обратным клапаном и дроссель путевой 29, который кинематически связан с поворотной подъемной платформой 3. Регулятор 28 расхода с обратным клапаном обеспечивает заданный скоростной режим опускания поворотной подъемной платформы (по существу - заданный скоростной режим втягивания штоков гидроцилиндров 2 поворота). Дроссель путевой 29 обеспечивает торможение поворотной подъемной платформы в конце подъема при подходе поршня гидроцилиндра к упору (на чертеже не показано). В качестве регулятора 28 расхода с обратным клапаном может быть использован, например, регулятор расхода с обратным клапаном типа МПГ55-34М, а в качестве дросселя путевого - дроссель путевой типа МДО-103 (изготовитель ОАО «Гидравлик» г. Грязи). Между односторонним гидрозамком 26 и штоковыми полостями гидроцилиндров 2 поворота установлен регулятор 30 давления с обратным клапаном, регулируемый по давлению срабатывания в зависимости от угла поворота платформы 3. В варианте выполнения регулятор 30 кинематически связан с поворотной подъемной платформой 3. Регулятор 30 давления с обратным клапаном обеспечивает компенсацию весовой нагрузки на гидроцилиндры 2, которая возникает от условно отрицательного момента силы тяжести поворотных частей (например, кантователя с установленным на нем объектом) при переходе линии действия силы тяжести поворотных частей через ось цапф (на чертеже не показано) поворотной подъемной платформы 3.
В варианте выполнения гидравлический привод содержит гидроблок 31 для опускания поворотной подъемной платформы вручную (по существу - для аварийного свертывания кантователя). Гидроблок 31 включает регулируемый вентиль 32, предохранительный клапан 33, обратные клапаны 34-36 и, например, три ручных насоса 37. Обратный клапан 34 имеет большее гидравлическое сопротивление (например, 0,2 МПа), чем обратный клапан 35 (например, 0,1 МПа). Обратные клапаны 35 и 36 выполнены одинаковыми. Вход регулируемого вентиля 32 гидравлически связан с поршневыми полостями гидроцилиндров 2 поворота, а выход - с входами обратных клапанов 34 и 35. Выход обратного клапана 35 гидравлически связан через предохранительный клапан 33 со сливной магистралью 38, а также гидравлически связан со штоковыми полостями гидроцилиндров 2 поворота и с выходом обратного клапана 36. Вход обратного клапана 36 гидравлически связан с напорной магистралью 39 ручных насосов 37 гидроблока 31. Напорная магистраль 39 имеет снабженный заглушкой 40 штуцер для подсоединения гибкого рукава высокого давления к ручным насосам 37 (на чертеже не показано). Таким образом, посредством съемного гибкого рукава высокого давления (РВД) обеспечивается возможность сообщения напорной магистрали ручного насоса 11 с напорной магистралью ручных насосов 37. Выход обратного клапана 34 через сливную магистраль 38 сообщен с баком 5 насосного агрегата 4. Магистраль 38 является одновременно магистралью для забора рабочей жидкости из бака 5 насосного агрегата с помощью ручных насосов 37 гидроблока.
Штоковые полости гидроцилиндров 2 поворота соединены магистралями 41-43 с регулятором 30 давления с обратным клапаном. Поршневые полости гидроцилиндров 2 соединены магистралями 44-46 с дросселем путевым 29 и магистралью 47 - с регулируемым вентилем 32 гидроблока 31. Выходы обратных клапанов 35, 36 гидроблока 31 соединены со штоковыми полостями гидроцилиндров 2 поворота магистралями 48 и 41-43.
В варианте осуществления изобретения регулятор 30 давления содержит корпус, в котором установлены клапан 49 с пружиной 50, на которую воздействует поршень 51 с роликом 52, взаимодействующим с кулачком 53, связанным с поворотной подъемной платформой 3. Кулачок 53 выполнен с заданным профилем. В корпусе регулятора 30 давления также установлен обратный клапан 54 и выполнены каналы 55-57. Дроссель путевой 29 содержит корпус, в котором установлены пружина 58 с золотником 59, на который воздействует шток 60 с роликом 61, взаимодействующим с кулачком 62, связанным с поворотной подъемной платформой 3. Кулачок 62 выполнен с заданным профилем. В корпусе дросселя путевого 29 также выполнен дроссель 63 малого сечения и каналы 64-67. В варианте осуществления изобретения оси вращения кулачков 53 и 62 геометрически совмещены с осью вращения поворотной подъемной платформы 3 (по существу - кулачки установлены на цапфах платформы 3 соосно последним). В другом варианте (на чертеже не показано) оси вращения кулачков могут быть геометрически совмещены с осями вращения, например, корпусов гидроцилиндров 2 поворота, величина угла поворота каждого из которых связана с величиной угла поворота платформы 3. В этом варианте кулачок может быть конструктивно совмещен с проушиной корпуса гидроцилиндра (т.е. конструктивно совмещен с частью корпуса гидроцилиндра, выполненной с отверстием для соединения с закрепленной на основании 1 осью поворота гидроцилиндра).
Гидравлический привод кантователя с поворотной подъемной платформой работает следующим образом.
Работа гидравлического привода кантователя производится в два этапа. Первый этап - подъем поворотной подъемной платформы с объектом (на чертеже не показано), второй этап - опускание поворотной подъемной платформы в исходное положение.
Для подъема поворотной подъемной платформы 3 по команде системы управления включают гидронасос 6 насосного агрегата 4. Для быстрого подъема платформы 3 дополнительно может быть включен гидронасос 7. При включении двух гидронасосов вначале они работают в режиме разгрузки и весь расход по соответствующим магистралям через клапаны разгрузки 8 и 9, сливной фильтр 16, блокировочный обратный клапан 19 поступает в бак 5. В режиме разгрузки давление, при котором работают гидронасосы, будет не более 1 МПа. Через 3...5 секунд после включения гидронасосов по команде реле времени (на чертеже не показано) включается трехпозиционный гидрораспределитель 10 (МГ1, МГ2) и клапаны разгрузки 8 и 9 запираются давлением жидкости, поступающей из напорной магистрали 12. Одновременно с трехпозиционным гидрораспределителем 10 включается трехпозиционный гидрораспределитель 24 (МГ2), жидкость от гидронасосов 6 и 7 под давлением поступит через блокировочный обратный клапан 18, фильтр напорный 15, по магистрали 12, через включенный трехпозиционный гидрораспределитель 24, односторонний гидрозамок 27, через обратный клапан регулятора 28 расхода, через открытый дроссель путевой 29, по магистралям 44, 45 и 46 в поршневые полости гидроцилиндров 2 поворота. Из штоковых полостей гидроцилиндров 2 поворота жидкость будет вытесняться по магистралям 41, 42 и 43, через регулятор 30 давления с обратным клапаном, через односторонний гидрозамок 26, через включенный трехпозиционный гидрораспределитель 24, блокировочный обратный клапан 25 в сливную магистраль 13 и далее через фильтр 16 и блокировочный обратный клапан 19 в бак 5.
Известно, что гидравлическая мощность, развиваемая гидронасосом, а следовательно, и потребляемая мощность от энергоисточника определяется по формуле:
N=PQ/612η,
где N - мощность, кВт; Р - давление, кг/см2; Q - подача насоса, л/мин; η - КПД.
Из формулы видно, что гидравлическая мощность при постоянной подаче гидронасоса прямо пропорциональна давлению, развиваемому гидронасосом.
В начале подъема поворотной подъемной платформы 3 с установленным на ней объектом на гидроцилиндр 2 поворота действует максимальная сжимающая сила и, следовательно, гидронасос в этот момент будет развивать максимальное давление и потреблять максимальную мощность от энергоисточника. В начальный период подъема момент силы тяжести поворотных частей относительно оси цапф поворотной подъемной платформы 3 условно положительный и препятствует повороту. При подъеме поворотной подъемной платформы с объектом на угол 90° условно положительный момент изменяется от максимального до нуля, и сжимающая сила на гидроцилиндре поворота также стремится к нулю. При этом давление у гидронасоса будет минимальным. При дальнейшем угловом перемещении поворотной подъемной платформы с объектом на угол больше 90° (~ до 100°) момент силы тяжести поворотных частей при переходе линии действия силы тяжести через ось цапф меняет свой знак на условно отрицательный, действуя в направлении углового перемещения. В результате на гидроцилиндрах 2 поворота 23 появляется растягивающая сила.
Эту силу необходимо компенсировать такой же и даже немного большей встречно направленной силой, в противном случае начнется неконтролируемое самопроизвольное движение поворотной подъемной платформы с объектом, которое может привести к нежелательным последствиям. Средством для компенсации переменной нагрузки на шток гидроцилиндра 2 поворота (т.е. средством, компенсирующим растягивающую силу на гидроцилиндре) является регулятор 30 давления с обратным клапаном, регулируемый по давлению срабатывания в зависимости от угла поворота поворотной подъемной платформы 3.
В варианте осуществления изобретения регулятор 30 давления кинематически связан с поворотной подъемной платформой 3 посредством кулачка 53 (см. фиг.6, 7). В начале подъема поворотной подъемной платформы, когда условно положительный момент силы тяжести поворотных частей максимальный и сила, сжимающая гидроцилиндры, тоже максимальна, регулятор давления находится в положении как показано на фиг.6. В этом положении пружина 50 находится в разжатом ослабленном состоянии и жидкость, вытесняемая из штоковых полостей гидроцилиндров 2 поворота, по магистралям 41-43 и каналу 55 поступает под клапан 49 регулятора 30 давления, открывает его и далее, не встречая большого сопротивления, через канал 56 проходит к открытому одностороннему гидрозамку 26 и далее через трехпозиционный гидрораспределитель 24, блокировочный обратный клапан 25, по сливной магистрали 13, через фильтр сливной 16 и блокировочный обратный клапан 19 поступает в бак 5. В варианте осуществления изобретения практически до угла поворота (подъема) платформы ~ 65° характеристика настройки по давлению срабатывания регулятора давления остается постоянной величиной, значение которой не превышает 0,3…0,5 МПа (см. фиг.8). Это достигается соответствующей кривизной профиля кулачка 53, которая остается постоянной при угловом перемещении платформы до указанного угла. Учитывая малую величину давления срабатывания регулятора 30 давления, практически вся мощность гидронасоса используется только на преодоление сжимающей нагрузки на гидроцилиндры 2 от условно положительного момента силы тяжести до угла поворота (подъем) ~ 65°. При повороте платформы 3 на угол 65° условно положительный момент от силы тяжести поворотных частей уменьшится ~ на 70%. Мощность гидронасоса на преодоление этого условно положительного момента также уменьшится на эту же величину за счет уменьшения давления в поршневых полостях гидроцилиндров 2. Начиная с угла поворота (подъема) 65°, за счет изменения кривизны профиля кулачка 53 меняется характеристика настройки по давлению срабатывания регулятора 30 давления в сторону увеличения давления срабатывания, т.е. производится подготовка регулятора давления к компенсации растягивающей нагрузки на штоки гидроцилиндров от условно отрицательного момента сил тяжести поворотных частей, появляющегося на угле подъема 90°. При этом изменяется силовая характеристика пружины 50 путем ее поджатия поршнем 51 с роликом 52. К моменту поворота (подъема) платформы 3 на угол ~85° регулятор 30 давления будет полностью подготовлен к компенсации нагрузки на гидроцилиндры 2, возникающей от условно отрицательного момента силы тяжести поворотных частей. Регулятор давления при этом находится в положении, показанном на фиг.7.
С целью безударного подхода поворотной подъемной платформы с объектом к упору в конце подъема (точнее - подхода к упору поршня гидроцилиндра поворота) в гидравлическом приводе предусмотрен дроссель путевой 29. Исходное положение дросселя путевого в начале поворота (подъема) платформы 3 показано на фиг.4. В этом положении жидкость в поршневые полости гидроцилиндров 2 поворота через дроссель путевой проходит по каналам 64-66, а также частично через дроссель 63 малого сечения и канал 67. При этом под действием пружины 58 золотник 59 дросселя путевого находится в крайнем правом положении (по чертежу), а канал 64 полностью открыт и не препятствует проходу жидкости в гидроцилиндры 2 поворота. Такое открытое положение дросселя путевого обеспечивается соответствующим профилем кулачка 62 и взаимодействующим с ним штоком 60 с роликом 61. Это положение дросселя путевого сохраняется практически до конца поворота (подъема) платформы за счет постоянной кривизны профиля кулачка. Перед подходом поршня гидроцилиндра поворота к упору (на чертеже не показано) ролик 61 вступает во взаимодействие с участком кулачка, на котором кривизна профиля кулачка меняется, золотник 59 посредством штока 60 с роликом 61 перемещается влево (по чертежу) и перекрывает канал 65. При этом жидкость в поршневые полости гидроцилиндров 2 поворота будет поступать только по каналу 64 через дроссель 63 малого сечения и каналы 66 и 67. В конце поворота (подъема) платформы 3 дроссель путевой 29 займет положение, как показано на фиг.5. При этом скорость перемещения поворотной подъемной платформы с объектом замедлится до величины, необходимой для обеспечения безударного окончания подъема.
Для опускания поворотной подъемной платформы 3 по команде системы управления включают гидронасос 6 насосного агрегата 4. При включении гидронасоса 6 вначале он работает в режиме разгрузки и весь расход по соответствующим магистралям через клапан разгрузки 8, сливной фильтр 16, блокировочный обратный клапан 19 поступает в бак 5. Через 3…5 секунд по команде реле времени включаются трехпозиционные гидрораспределители 10 (МГ2) и 24 (МГ1). Жидкость под давлением от гидронасоса 6 через блокировочный обратный клапан 18, фильтр напорный 14, по напорной магистрали 12, через трехпозиционный гидрораспределитель 24, односторонний гидрозамок 26, обратный клапан регулятора 30 давления, по магистралям 41, 43 и 42 поступает в штоковые полости гидроцилиндров 2 поворота. Из поршневых полостей гидроцилиндров поворота жидкость будет вытесняться по магистралям 44, 45, 46 через дроссель путевой 29, регулятор 28 расхода с обратным клапаном, открытый односторонний гидрозамок 27, трехпозиционный гидрораспределитель 24, через блокировочный обратный клапан 25, по сливной магистрали 13, через фильтр сливной 16 и блокировочный обратный клапан 19 в бак 5. В начале опускания поворотной подъемной платформы 3 жидкость из поршневых полостей гидроцилиндров 2 поворота будет проходить через дроссель путевой 29 по каналам 66, 67, дроссель 63 малого сечения и по каналу 64. При этом будет обеспечена медленная скорость опускания и, следовательно, плавное начало опускания. При дальнейшем опускании платформы 3, сопровождающемся поворотом кулачка 62, золотник 59 под действием пружины 58 переместится вправо до упора и займет положение, как показано на фиг.5. При этом откроется канал 64 и жидкость из поршневых полостей гидроцилиндров 2 поворота без сопротивления на дросселе 63 пройдет дроссель путевой 29. В результате скорость опускания поворотной подъемной платформы увеличится и будет определяться величиной расхода, на которую настроен регулятор 28 расхода с обратным клапаном. Эта величина будет постоянной при опускании поворотной подъемной платформы с объектом независимо от изменения нагрузки на гидроцилиндрах 2 поворота.
При опускании поворотной подъемной платформы вручную (например, в случае прекращения подачи электроэнергии) гидравлический привод работает следующим образом. По причине того что производительность ручного насоса невелика (~ 0,5 л/мин) по отношению к объему жидкости, закачиваемой в гидроцилиндры 2 поворота, с целью ускорения процесса аварийного опускания платформы с объектом в гидроблоке 31 для опускания поворотной подъемной платформы вручную предусмотрено, например, три ручных насоса 37. Вместе с этим может быть задействован и четвертый насос - ручной насос 11 насосного агрегата 4. Для этого необходимо снять заглушки 23 и 40 с соответствующих штуцеров насосного агрегата 4 и гидроблока 31 и соединить эти штуцеры гибким рукавом высокого давления (из запасных частей и принадлежностей кантователя). Перед началом работы ручными насосами 11 и 37 необходимо открыть вентиль 22 на всасывающей магистрали ручного насоса 11 и закрыть вентиль 21 на напорной магистрали ручного насоса 11 для предотвращения потерь рабочей жидкости в результате утечек. Также необходимо открыть регулируемый вентиль 32. При подаче рабочей жидкости от ручных насосов жидкость по напорной магистрали 39, через обратный клапан 36, по магистралям 48, 43, 41 и 42 поступит в штоковые полости гидроцилиндров 2 поворота. Штоки гидроцилиндров поворота начнут втягиваться внутрь гидроцилиндров, преодолевая усилие условно отрицательного момента от силы тяжести поворотных частей. Жидкость из поршневых полостей гидроцилиндров 2 поворота будет вытесняться по магистралям 44-47, через регулируемый вентиль 32, обратный клапан 34 в сливную магистраль 38 и далее через открытый вентиль 22 в бак 5. Одновременно будет осуществляться подпитка всасывающей магистрали ручных насосов 37, так как сливная магистраль 38 является одновременно магистралью для забора рабочей жидкости из бака 5 насосного агрегата с помощью ручных насосов 37, и тем самым будет облегчен режим их работы. Постепенно, по мере углового перемещения поворотной подъемной платформы с объектом, величина условно отрицательного момента силы тяжести поворотных частей будет уменьшаться и, когда его величина станет равной нулю, растягивающая нагрузка на штоки гидроцилиндров исчезнет. При дальнейшем опускании поворотной подъемной платформы момент от силы тяжести поворотных частей меняет свой знак на условно положительный, действуя в направлении углового перемещения. Поворотная подъемная платформа 3 с установленным на ней объектом начнет опускаться под собственным весом. При этом отпадет необходимость подачи рабочей жидкости ручными насосами. В режиме опускания поворотной подъемной платформы под собственным весом жидкость из поршневых полостей гидроцилиндров 2 поворота вытесняется по магистралям 44-47, через регулируемый вентиль 32, обратный клапан 34 с повышенным гидравлическим сопротивлением, по сливной магистрали 38, через вентиль 22 в бак 5. Одновременно, так как ручные насосы в этом режиме не работают, часть жидкости, вытесняемой из поршневых полостей, через обратный клапан 35 поступает в штоковые полости гидроцилиндров 2 поворота, заполняя вакуум, который образуется в упомянутых полостях в этом режиме. Гарантированному заполнению жидкостью штоковых полостей гидроцилиндров поворота способствует также большее гидравлическое сопротивление обратного клапана 34 по сравнению с гидравлическим сопротивлением обратного клапана 35.
В варианте осуществления изобретения обратный клапан 34 выполнен с гидравлическим сопротивлением в 0,2 МПа, а обратный клапан 35 - с гидравлическим сопротивлением в 0,1 МПа, в результате жидкость идет по линии наименьшего сопротивления в штоковые полости гидроцилиндров, а избыточное количество жидкости открывает обратный клапан 34 и проходит в сливную магистраль 38 и далее в бак 5. Скорость опускания поворотной подъемной платформы с объектом регулируется с помощью регулируемого вентиля 32.
Таким образом, благодаря особенности исполнения гидравлического привода кантователя с поворотной подъемной платформой изобретение позволяет создать гидравлический привод с переменной нагрузкой на шток гидроцилиндра, обеспечивающий повышение надежности и безопасности. Вместе с этим использование изобретения позволяет значительно повысить эффективность гидравлического привода за счет снижения затрачиваемой мощности на подъем поворотной подъемной платформы с объектом благодаря применению регулятора давления, регулируемого по давлению срабатывания в зависимости от угла поворота поворотной подъемной платформы, автоматически настраивающегося в соответствии с нагрузкой от условно отрицательного момента силы тяжести поворотных частей, появляющегося на гидроцилиндре в период поворота (подъема) поворотной подъемной платформы. Кроме того, благодаря применению путевого дросселя, кинематически связанного с поворотной подъемной платформой, обеспечивается плавное изменение скорости выдвижения штока гидроцилиндра и тем самым обеспечивается безударный подход к упору в конце подъема платформы, что повышает надежность гидравлического привода в целом. Вместе с этим наличие в гидравлическом приводе гидроблока для опускания поворотной подъемной платформы вручную позволяет при прекращении подачи электроэнергии или при выходе из строя гидронасоса произвести опускание платформы с объектом и перевести гидравлический привод в исходное состояние. Таким образом, наличие упомянутого гидроблока также повышает надежность и безопасность эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2230020C1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
Гидравлический привод содержит гидроцилиндр поворота, средство для компенсации переменной нагрузки на шток гидроцилиндра поворота в зависимости от угла поворота поворотной подъемной платформы и насосный агрегат с баком, включающий гидронасос. Насосный агрегат через первый трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота. Средство для компенсации переменной нагрузки на шток гидроцилиндра поворота включает регулятор давления с обратным клапаном, регулируемый по давлению срабатывания в зависимости от угла поворота упомянутой платформы. Гидравлический привод содержит второй трехпозиционный гидрораспределитель с электромагнитным управлением, первый и второй односторонние гидрозамки, регулятор расхода с обратным клапаном и дроссель путевой, который кинематически связан с упомянутой платоформой. Изобретение обеспечивает повышение надежности и безопасности эксплуатации. 5 з.п. ф-лы, 8 ил.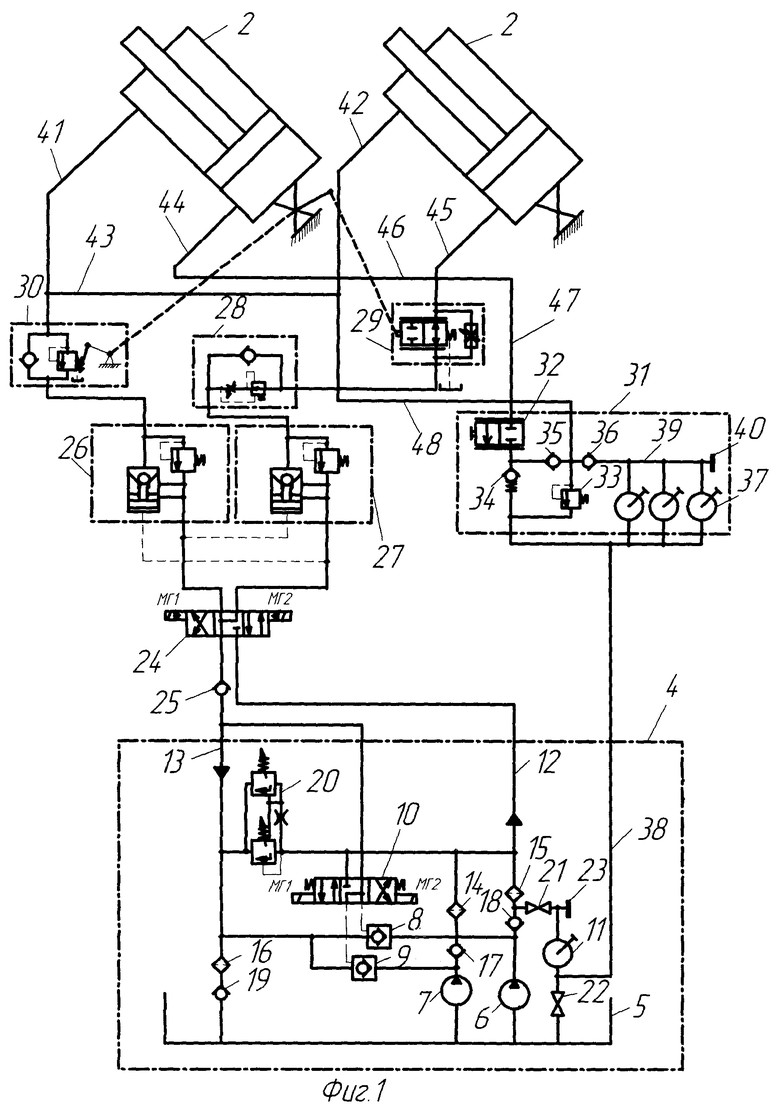
1. Гидравлический привод преимущественно кантователя с поворотной подъемной платформой, содержащий по меньшей мере один гидроцилиндр поворота, средство для компенсации переменной нагрузки на шток гидроцилиндра поворота в зависимости от угла поворота упомянутой платформы и насосный агрегат с баком, включающий по меньшей мере один гидронасос, причем насосный агрегат через первый трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота, последний шарнирно соединен соответственно с основанием кантователя и поворотной подъемной платформой, которая шарнирно закреплена на основании кантователя с возможностью поворота в вертикальной плоскости, отличающийся тем, что средство для компенсации переменной нагрузки на шток гидроцилиндра поворота включает регулятор давления с обратным клапаном, регулируемый по давлению срабатывания в зависимости от угла поворота упомянутой платформы, при этом гидравлический привод дополнительно содержит второй трехпозиционный гидрораспределитель с электромагнитным управлением, первый и второй односторонние гидрозамки, регулятор расхода с обратным клапаном и дроссель путевой, который кинематически связан с поворотной подъемной платформой, причем напорная магистраль, связывающая насосный агрегат с гидроцилиндром поворота, имеет возможность сообщения с поршневой полостью гидроцилиндра поворота через второй трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции через первый односторонний гидрозамок, регулятор расхода с обратным клапаном и дроссель путевой, а также имеет возможность сообщения со штоковой полостью гидроцилиндра поворота через второй трехпозиционный гидрораспределитель с электромагнитным управлением в другой его позиции через второй односторонний гидрозамок и регулятор давления с обратным клапаном.
2. Гидравлический привод по п.1, отличающийся тем, что регулятор давления с обратным клапаном кинематически связан с поворотной подъемной платформой.
3. Гидравлический привод по п.1, отличающийся тем, что он содержит гидроблок для опускания поворотной подъемной платформы вручную, который через магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра поворота и с насосным агрегатом с баком, при этом упомянутый гидроблок включает по меньшей мере один ручной насос, регулируемый вентиль, предохранительный клапан, а также первый, второй и третий обратные клапаны, причем первый обратный клапан имеет гидравлическое сопротивление большее, чем гидравлическое сопротивление второго обратного клапана, а второй и третий обратные клапана выполнены одинаковыми, при этом вход регулируемого вентиля гидравлически связан с поршневой полостью гидроцилиндра поворота, а выход - с входами первого и второго обратных клапанов, выход второго обратного клапана гидравлически связан через предохранительный клапан с дополнительно введенной сливной магистралью, а также гидравлически связан со штоковой полостью гидроцилиндра поворота и с выходом третьего обратного клапана, вход которого гидравлически связан с напорной магистралью ручного насоса гидроблока, при этом выход первого обратного клапана через последнюю упомянутую сливную магистраль сообщен с баком насосного агрегата, причем эта сливная магистраль является одновременно магистралью для забора рабочей жидкости из бака насосного агрегата с помощью ручного насоса гидроблока.
4. Гидравлический привод по п.3, отличающийся тем, что насосный агрегат с баком содержит ручной насос, напорная магистраль которого имеет возможность сообщения с напорной магистралью ручного насоса гидроблока посредством съемной магистрали.
5. Гидравлический привод по п.4, отличающийся тем, что съемная магистраль выполнена в виде гибкого рукава.
6. Гидравлический привод по п.3, отличающийся тем, что он снабжен вторым гидроцилиндром поворота, который установлен параллельно первому гидроцилиндру поворота и шарнирно соединен соответственно с основанием кантователя и поворотной подъемной платформой, при этом второй гидроцилиндр поворота сообщен с насосным агрегатом через упомянутые регулятор давления с обратным клапаном, дроссель путевой и гидроблок для опускания поворотной подъемной платформы вручную.
| УСТРОЙСТВО УРАВНОВЕШИВАНИЯ СИЛЫ ТЯЖЕСТИ РАБОЧЕГО ОБОРУДОВАНИЯ СТРЕЛОВОЙ МАШИНЫ (ВАРИАНТЫ) | 2005 |
|
RU2304668C1 |
| DE 10351126 ВЗ, 14.07.2005 | |||
| Опрокидыватель транспортных средств | 1988 |
|
SU1720969A1 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU982897A2 |
| Кантователь | 1981 |
|
SU992367A1 |

