Изобретение относится к подъемно-транспортному машиностроению и касается гидравлического привода стреловых самоходных кранов большой грузоподъемности.
Известен гидравлический привод стрелового крана, имеющий двухпоточную гидроксистему с автоматическим объединением потоков и раздельным питанием гидродвигателей для гидропривода механизмов рабочего оборудования и поворота платформы (Одноковшовые экскаваторы и самоходные краны с гидравлическим приводом. Коллектив авторов под редакцией И.Л. Беркмана, М.: Машиностроение, 1971, с. 161-163). Известный гидравлический привод содержит гидроцилиндры соответственно подъема груза и стрелоподъемного механизма, гидромотор поворота платформы, сообщенный через соответствующие трехпозиционные распределители и источником питания и баком. При этом трехпозиционные распределители соответственно гидромотора поворота платформы и гидроцилиндра стрелоподъемного механизма сообщены и источником питания каждый через соответствующий двухпозиционный распределитель в одной его позиции. Источник питания выполнен в виде двух насосов регулируемой производительности. Насос меньшей производительности, регулируемый вручную, питает гидромотор поворота плафтормы. Насос большей производительности, регулируемый автоматически, питает гидроцилиндр стрелоподъемного механизма. В гидроцилиндры подъема груза рабочая жидкость высокого давления поступает от обоих насосов через упомянутые двухпозиционные распределители, имеющие механическую связь с трехпозиционными распределителями управления соответственно гидромотором и гидроцилиндром стрелоподъемного механизма. При этом упомянутые двухпозиционные распределители пропускают расход соответствующего насоса только при нейтральном положении соответствующего трехпозиционного распределители. Таким образом, имеется возможность совмещать любые две рабочие операции, а на операции подъема груза использовать объединенный поток насосов. Опускание груза происходит под действием его веса при разгрузке насосов. Скорость опускания регулируется трехпозиционным распределителем гидроцилиндров подъема груза, регулирование непрямое с помощью редукционного клапана. Опускание стрелы происходит без разгрузки насоса при прямом регулировании скорости дросселированием. Механизм поворота приводится от аксиального роторно-поршневого гидромотора, причем торможение платформы осуществляется с помощью постоянно замкнутого фрикционного тормоза с автоматическим гидравлическим размыкателем в виде одностороннего гидроцилиндра, поршеньковая полость которого с помощью двухпозиционного распределителя в одной его позиции сообщена с насосом, питающим гидромотор.
Недостатком известного гидравлического привода является то, что в нем на рабочих операциях не предусмотрена защита крана от перегрузок в случае превышения допускаемого грузового момента. Кроме того, в приводе используется ручное регулирование насоса, питающего гидромотор поворота платформы, что создает неудобства при работе машиниста, обслуживающего кран.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод стрелкового самоходного крана по авт. св. СССР N 1235814, МПК B 66 C 13/42, 1986, который и выбран в качестве ближайшего аналога-прототипа. Известный гидравлический привод содержит источник питания, от которого жидкость поступает к четырем трехпозиционным распределителям с гидравлическим управлением, сообщающих источник питания с гидроцилиндрами соответственно механизмов выдвижения и подъема стрелы, гидромоторами соответственно поворота платформы и грузовой лебедки и гидроцилиндрами тормозов упомянутых гидромоторов. Из трехпозиционных распределителей жидкость через фильтр направляется в бак. Трехпозиционные распределители смонтированы в распределительном блоке. В последнем и в фильтре установлены предохранительные клапаны. Полости управления трехпозиционных распределителей через блоки клапанов сервоуправления сообщены магистралями с насосом управления и баком. При этом одни из полостей управления трехпозиционных распределителей механизма выдвижения и подъема стрелы и гидромотора грузовой лебедки через два клапана ИЛИ и дополнительные магистрали сообщены с двухпозиционным распределителем с электромагнитным управлением, который в одной своей позиции через дренажную линию сообщен с баком. Электромагнит двухпозиционного распределителя подсоединен к установленному на кране ограничителю грузового момента (ограничителю грузоподъемности) и при работе привода постоянно включен. При включении ограничителя грузоподъемности электромагнит отключается , и золотник двухпозиционного распределителя перемещается в позицию, в которой одна из полостей управления соответствующего выполняемой операции трехпозиционного распределителя сообщается через дренажную линию с баком. Таким образом, с помощью двухпозиционного распределителя с электромагнитным управлением осуществляется защита крана от перегрузок в случае превышения допускаемого грузового момента.
Недостатком известного привода является то, что он не обеспечивает совмещение рабочих операций. Этот недостаток обусловлен тем, что исполнительные гидродвигатели имеют единственный источник питания и в случае включения, например, двух операций совершаться будет только та операция, на выполнение которой требуется меньшее давление жидкости.
Кроме того, известный гидравлический привод предполагает использование в качестве источника питания насоса постоянной производительности, вследствие этого для изменения скорости работы крана на рабочей операции привод должен работать в режиме дросселирования соответствующего трехпозиционного распределителя, при этом часть жидкости, поступающей от насоса, стравливается через предохранительный клапан в бак. Это обстоятельство приводит к нагреву жидкости и снижению КПД привода в целом.
Вместе с этим в гидравлическом приводе не предусмотрена защита от перегрузок в случае превышения допускаемого грузового момента при выполнении операции поворота платформы, что снижает безопасность работы крана.
К недостаткам привода можно отнести также что, что при включении ограничителя грузоподъемности падает давление не только в линии управления соответствующего выполняемой операции трехпозиционного распределителя, но и напорной линии насоса управления, до тех пор пока машинист не вернет рукоятку управления в исходное положение. Кроме того, в приводе не предусмотрена защита насоса при запуске его под нагрузку при температуре жидкости, не соответствующей диапазону ее рабочих температур.
Задачей настоящего изобретения является обеспечение возможности совмещения рабочих операций независимо от величины нагрузки на каждый исполнительный гидродвигатель, защита привода от перегрузки в случае превышения допускаемого грузового момента при выполнении любой рабочей операции, а также повышение КПД привода.
Решение указанной задачи обеспечивается тем, что известный гидравлический привод стрелового самоходного крана, содержащий гидроцилиндры соответственно механизмов выдвижения и подъема стрелы, снабженные тормозами с гидроцилиндрами, гидромоторы соответственно поворота платформы и грузовой лебедки, сообщенные через соответствующие трехпозиционные распределители с источником питания и баком, блоки клапанов сервоуправления, через которые посредством магистралей полости управления трехпозиционных распределителей сообщены с насосом управления и баком, клапаны ИЛИ, через которые посредством дополнительных магистралей одни из полостей управления трехпозиционных распределителей гидроцилиндров механизмов выдвижения и подъема стрелы и гидромотора грузовой лебедки сообщены с баком через двухпозиционный распределитель с электромагнитным управлением в одной его позиции, последний связан с ограничителем грузового момента, согласно изобретению содержит пневмогидроаккумулятор, установленный в магистрали между насосом управления и блоками клапанов сервоуправления, и снабжен дополнительными двухпозиционными распределителями с электромагнитным управлением, связанными с ограничителем грузового момента. Каждая из упомянутых полостей управления трехпозиционных распределителей гидроцилиндров механизмов выдвижения и подъема стрелы и гидромотора грузовой лебедки и одна из полостей управления трехпозиционного распределителя гидромотора поворота платформы сообщены с баком каждая через свой двухпозиционный распределитель. Вторая соответствующая полость управления трехпозиционного распределителя гидроцилиндра механизма подъема стрелы, гидромоторов соответственно поворота платформы и грузовой лебедки по меньшей мере через один клапан ИЛИ сообщена с баком через другой, связанный с ограничителем грузового момента двухпозиционный распределитель в одной его позиции. При этом золотники трехпозиционных распределителей гидромоторов соответственно поворота платформы и грузовой лебедки сблокированы с соответствующими золотниками дополнительно введенных трехпозиционных распределителей, через которые упомянутые гидроцилиндры тормозов гидромоторов сообщены с насосом управления. Гидравлический привод содержит источник питания, представляющий собой два аксиально-поршневых регулируемых насоса, каждый - с регулятором мощности. Регулирующий орган системы управления подачи жидкости каждого насоса кинематически связан с подпружиненным штоком соответствующего дополнительно введенного одностороннего гидроцилиндра, поршеньковая полость которого по меньшей мере через один клапан ИЛИ сообщена с соответствующим блоком клапанов сервоуправления. Полости управления аксиально-поршневых насосов сообщены через вторые дополнительные магистрали с упомянутым насосом управления.
Кроме того, гидравлический привод снабжен средством для автоматической термозащиты упомянутых аксиально-поршневых насосов.
Средство для автоматической термозащиты аксиально-поршневых насосов выполнено в виде двух предохранительных клапанов давления, каждый из которых установлен в напорной магистрали соответствующего насоса и сообщен с баком через соответствующий двухпозиционный распределитель с электромагнитным управлением в одной его позиции. Последний связан с установленным в баке датчиком температуры.
Технический результат использования изобретения состоит в том, что в сравнении с известным гидравлическим приводом обеспечивается повышение КПД привода благодаря исключению потерь энергии на дросселирование в гидрораспределителях. Вместе с этим обеспечивается возможность совмещения по меньшей мере двух рабочих операций, а также повышение безопасности работы крана благодаря обеспечению защиты привода от перегрузки в случае превышения допускаемого грузового момента при выполнении любой операции. Кроме того, изобретение позволяет повысить надежность привода благодаря тому, что предусмотрена защита насосов при запуске их под нагрузку при температуре рабочей жидкости, не соответствующей диапазону ее рабочих температур.
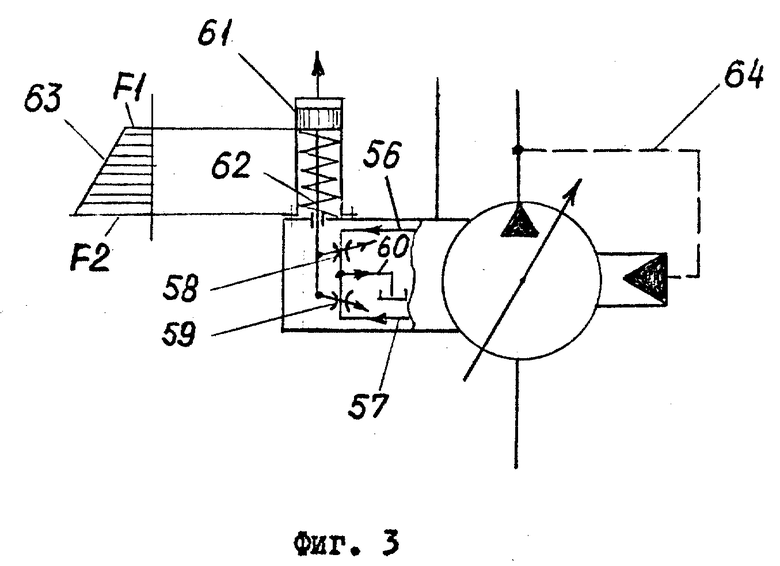
На фиг. 1 представлена принципиальная схема гидравлического привода стрелового самоходного крана; на фиг. 2 - схема предохранительного клапана давления, элемент A на фиг. 1; на фиг. 3 - схема аксиально-поршневого регулируемого насоса с регулятором мощности (элементы системы управления от внешнего гидравлического сигнала показаны не все), элемент Б на фиг. 1.
Гидравлический привод стрелового самоходного крана содержит гидромотор 1 привода поворота платформы, снабженный тормозом с гидроцилиндром 2, гидроцилиндр 3 механизма выдвижения стрелы, гидроцилиндр 4 подъема стрелы, гидромотор 5 грузовой лебедки, снабженный тормозом с гидроцилиндром 6. Упомянутые исполнительные гидродвигатели соответственно связаны с трехпозиционными распределителями 7-10. Золотники распределителей 7, 10 соответственно сблокированы с золотниками трехпозиционных распределителей 11, 12, управляющих работой тормозов гидроцилиндров 2, 6 гидромоторов 1, 5. Трехпозиционные распределители 7-12 размещены в едином блоке, включающем в себя предохранительные клапаны давления 13, 14. Упомянутый блок через каналы управления "а" - "ж", "и" гидравлически связан с блоком безопасности 15, в котором размещены двухпозиционные распределители 16-24. Блок безопасности 15 гидравлически связан с блоками 25, 26 клапанов сервоуправления. В качестве блока клапанов сервоуправления может быть использован, например, блок управления типа 60170 ХЛ (изготовитель ПО "Московский машиностроительный завод им. Калинина"). Указанный блок управления представляет собой четырехзолотниковый блок с рычагом управления на шаровом шарнире с возможностью одновременного включения одного или двух сменных золотников с возвратом в нейтральное положение рычага при снятии с него управляющего усилия. Блок управления работает по принципу редукционного клапана, настройка которого определяется положением рычага управления. Блоки 25, 26 клапанов сервоуправления связаны с блоком безопасности 15 магистралями соответственно 27-30 и 31-34. На вход каждого блока клапанов сервоупавления подводится жидкость от насоса 35 управления. В магистрали между насосом 35 и блоками 25, 26 клапанов сервоуправления установлен автоматически подзаряжаемый пневмогидроаккумулятор 36 с гидроклапанами 37-39. В качестве последнего может быть использован, например, пневмогидроаккумулятор с гидроклапанами типа 6400 A (изготовитель - ПР "Московский машиностроительный завод им. Калинина"). От насоса управления жидкость поступает по магистрали 40 к редукционному клапану 38, а от него - к предохранительному клапана 39 и обратному клапану 37 и далее - к пневмогидроаккумулятору 36 и на входы блоков 25, 26 клапанов сервоуправления. С магистралью 40 связан предохранительный клапан 41 насоса управления.
Гидравлический привод содержит источник питания, представляющий собой два аксиально-поршневых регулируемых насоса 42, 43, каждый - с регулятором мощности. В качестве подобного насоса может быть использован насос типа НК 40 (изготовитель -АО "Пролетарский завод", Санкт-Петербург). Насосы 42, 43 гидравлически связаны соответственно трехпозиционными распределителями 7, 8. Полости управления насосов 42, 43 через соответствующие магистрали 44, 45 сообщены с напорной магистралью 40 насоса 35. Системы управления насосов 42, 43 через магистрали "м" и "н" сообщены соответственно со смонтированными в блоке безопасности 15 клапаном ИЛИ 46 и клапанами ИЛИ 47-51. Сливная магистраль 52 гидравлического привода через фильтр 53 сообщена с баком 54. В последнем установлен датчик 55 температуры.
Каждый из насосов 42, 43 имеет систему управления подачи жидкости, работающую от внешнего гидравлического сигнала в виде переменного давления управления, который поступает по соответствующей магистрали "м", "н" от клапанов соответственно 46, 51 блока безопасности 15. Система управления подачи жидкости включает каналы 56, 57, дроссели 58, 59 и дренажный канал 60, сообщенный с баком. Жидкость под давлением от насоса 35 управления поступает к дросселям 58, 59 и далее по каналу 60 - в бак, одновременно жидкость от насоса управления поступает к золотнику системы управления подачи жидкости соответствующего аксиально-поршневого насоса и к силовому цилиндру привода управления наклоном люльки насоса (не показаны). Регулирующий орган системы управления подачи жидкости кинематически связан со штоком одностороннего гидроцилиндра 61, поршень которого со стороны штока подпружинен пружиной 62. Последняя имеет силовую характеристику, показанную на диаграмме 63, где F1, F2 - пределы изменения усилия пружины. Поршеньковая полость гидроцилиндра 61 насоса 42 через клапан ИЛИ 46 сообщена с блоком 25 клапанов сервоуправления. Поршеньковая полость гидроцилиндра 61 насоса 43 через клапаны ИЛИ 47, 50, 51 сообщена с блоком 25 клапанов сервоуправления и через клапаны 48-51 - с блоком 26 клапанов сервоуправления.
Кроме системы управления от внешнего гидравлического сигнала в виде переменного давления каждый аксиально-поршневой регулируемый насос 42, 43 имеет внутреннюю систему управления от регулятора мощности в режиме постоянства мощности P•Q = Const, где P - давление в соответствующей напорной магистрали, воздействующее на регулятор мощности через канал 64, Q - расход насоса (упомянутая система не показана).
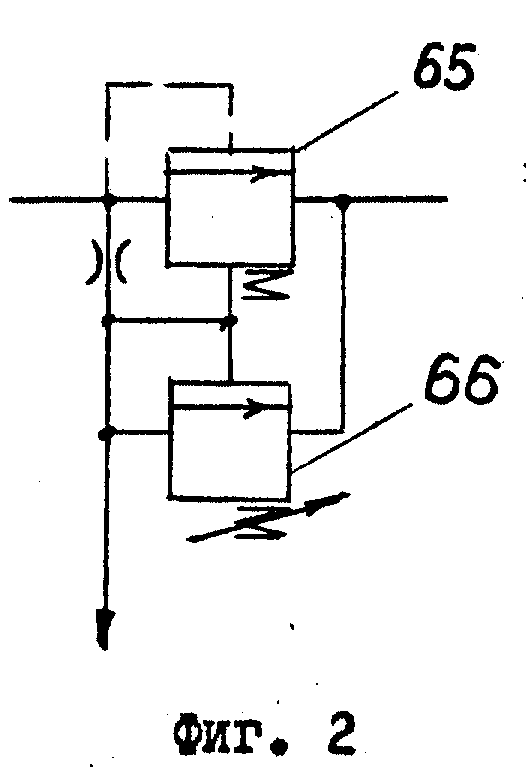
Установленные в напорных магистралях 42, 43 предохранительные клапаны соответственно 13, 14 выполнены каждый в виде клапана непрямого действия, включающего основной переливной клапан 65 и настраиваемый на определенное давление клапан 66 (см. фиг. 2). В качестве предохранительного клапана может быть использован, например, клапан типа 510.32.03 (изготовитель ПО "Московский машиностроительный завод им. Калинина). Клапаны 13, 14 через каналы соответственно "к", "л" гидравлически связаны с соответствующими двухпозиционными распределителями 23, 24 с электромагнитным управлением, размещенными в блоке безопасности 15. Последние связаны с установленным в баке 54 датчиком 55 температуры. Каждый предохранительный клапан 13, 14 через соответствующий двухпозиционный распределитель в одной позиции последнего сообщен с баком 54. Предохранительные клапаны имеют каждый два режима работы. Когда соответствующий канал ("к" или "л") управления закрыт, то каждый клапан работает как обычный предохранительный клапан, срабатывающий при давлении (например, 25 МПа), на которое настроен клапан 66. Когда канал управления клапана через соответствующий двухпозиционный распределитель 23, 24 сообщен со сливной магистралью 52, то клапан работает в режиме разгрузки, при этом величина давления его срабатывания определяется усилием пружины (например, 0,5-1 МПа) переливного клапана 65.
Каналы "а"-"ж", "и", а следовательно, и соответствующие полости управления трехпозиционных распределителей 7 - 10 соответственно сообщены с двухпозиционными распределителями 16 - 22 с электромагнитным управлением, каждый из которых в одной своей позиции через магистраль 52 сообщен с баком 54. Упомянутые двухпозиционные распределители связаны с установленным на кране ограничителем грузового момента. В варианте осуществления изобретения ограничитель грузового момента представляет собой систему, которая включает ЭВМ, датчик массы поднимаемого груза, датчик длины вдвижения стрелы, датчик угла подъема стрелы, датчик угла поворота поворотной части и датчик крена платформы (не показаны).
Гидравлический привод стрелового самоходного крана работает следующим образом.
Перед началом работы крана включаются электромагниты двухпозиционных распределителей 16-22, при этом соединяются магистрали 27-29, 31-34 блоков 25, 26 клапанов сервоуправления с каналом управления "а", "б", "в", "д", "е", "ж", "и", включается насос 35 управления и жидкость под давлением, соответствующим настройке предохранительного клапана 41 поступает по магистралям 44, 45 в систем управления аксиально-поршневых насосов соответственно 42, 43. Одновременно жидкость под давлением поступает к трехпозиционным распределителям 11, 12, 11, 12, управляющим тормозами гидроцилиндров 2, 6 гидромоторов 1, 5. Вместе с этим жидкость от насоса управления по магистрали 40 поступает в редукционному клапана 32, далее - к предохранительному клапану 39 и через обратный клапан 37 - заряжает пневмогидроаккумулятор 36, который обеспечивает стабильное давление на входе в блоки 25, 26 клапанов сервоуправления.
После пуска насосов 42, 43 гидравлический привод стрелового крана будет готов к работе. В исходном положении углы наклона управляемых машинистом крана рычагов (рукояток) управления блоков 25, 26 равны 0o. В этом положении магистрали 27-29, 31-34 через блоки 25, 26 соединены со сливной магистралью 52, сообщенной с баком 54, и в магистрали "м", "н" систем управления насосов 42, 43 давление управления от блока безопасности 15 не поступает. В положении, когда нет давления управления в магистралях "м", "н", угол наклона люльки каждого насоса равен 0o и расход каждого насоса также равен 0.
При повороте платформы крана машинист управляет рукояткой управления блока 25. При отклонении упомянутой рукоятки в положение B1 в магистраль 27 поступает давление управления, изменяющееся в зависимости от угла наклона рукоятки. Это переменное давление управления через включенный двухпозиционный распределитель 16 по каналу "а" поступает в линию управления трехпозиционного распределителя 7. Одновременно переменное давление управления через клапан ИЛИ 46 по магистрали "м" поступает в поршеньковую полость гидроцилиндра 61 системы управления насоса 42. Пружина, возвращающая золотник трехпозиционного распределителя 7 в нейтральное положение, рассчитана таким образом, что золотник перемещается до упора при определенном давлении (например, 0,6 МПа), при этом площадь поршня гидроцилиндра 61 и пружина 62 выбраны таким образом, что подпружиненный поршень гидроцилиндра начинает перемещаться после того, как давление в магистрали "м" достигнет упомянутого определенного давления. Шток гидроцилиндра 61 при своем перемещении воздействует на регулирующий орган системы управления подачи жидкости насоса 42. При одинаковой настройке дросселей 58, 59, а следовательно, при одинаковом перепаде давления в каналах 56, 57, по которым поступает жидкость от насоса 35 управления, система управления насоса 42 удерживает люльку насоса в исходном положении. Таким образом, машинист крана, наклоняя рукоятку управления блока 25 и подавая переменное давление управления к трехпозиционному распределителю 7 и одновременно в систему управления насоса 42, вначале перемещает золотник трехпозиционного распределителя до упора упомянутым определенным давлением и тем самым открывает проход жидкости от насос 42 к гидромотору 1, а затем повышающимся давлением управления автоматически изменяет расход насоса, изменяя тем самым скорость платформы. При этом в сравнении с прототипом скорость поворота платформы изменяется только за счет изменения расхода насоса, а не за счет режима дросселирования трехпозиционного распределителя, что повышает КПД привода, исключает нагрев жидкости и работу привода на предельном давлении при травлении предохранительного клапана.
При премещении золотника трехпозиционного распределителя 7 одновременно перемещается сблокированный с ним золотник трехпозиционного распределителя 11, посредством которого жидкость от насоса 35 управления поступает в гидроцилиндр 2 тормоза гидромотора 1 и растормаживает последний. Поступающая к гидромотору жидкость при повороте платформы крана вытесняется через трехпозиционный распределитель 7 в сливную магистраль 52 и через фильтр 53 поступает в бак 54. Управляющее давление от блока управления 25 к трехпозиционному распределителю 7 по каналу управления "а" и к насосу 42 через клапан ИЛИ 46 по магистрали "м" поступает через включенный двухпозиционный распределитель 16. В случае превышения допускаемого грузового момента включается ограничитель грузового момента и по его сигналу отключается электромагнит распределителя 16, при этом независимо от положения рукоятки блока управления, которой управляет машинист, управляющее давление в канале "а" управления трехпозиционным распределителем 7 и в магистрали "м" управления насосом 42 становится равным нулю, т.к. упомянутые гидромагистрали сообщаются через выключившийся распределитель 16 со сливной магистралью и с баком. Сблокированные золотники трехпозиционных распределителей 7, 11 устанавливаются пружинами в нейтральное положение. Гидромотор 1 останавливается и затормаживается гидроцилиндром тормоза 2, при этом, поскольку отсутствует давление в магистрали "м", поршень одностороннего гидроцилиндра 61 под действием пружины 62 возвращается в исходное положение, дроссели 58, 59 выравнивают давление в каналах 56, 57 системы управления насоса 42, люлька насоса устанавливается в исходное положение, расход насоса становится равным нулю. Таким образом, в случае срабатывания ограничителя грузового момента не происходит потери энергии насоса на травление предохранительного клапана и обеспечивается безопасность работы крана при повороте платформы.
При повороте платформы крана в другом направлении машинист устанавливает рукоятку управления в положение B3. При этом давление управления поступает в магистраль 26 и через включенный двухпозиционный распределитель 17 по каналу "б" - в линию управления трехпозиционным распределителем 7. Золотник последнего совместно с золотником трехопзиционного распределителя 11 перемещается в соответствующем направлении и при упомянутом определенном давлении в канале управления "б" доходит до упора. Одновременно переменное давление управления через клапана ИЛИ 46 по магистрали "м" поступает в поршеньковую полость гидроцилиндра 61 системы управления насоса 42. В зависимости от угла наклона рукоятки управления блока 35 в положении B3 насос 42 будет изменять свою производительность и, таким образом, будет изменяться скорость поворота платформы. В данном случае защита крана от превышения допускаемого грузового момента обеспечивается посредством двухпозиционного распределителя 17. При превышении допускаемого грузового момента по сигналу ограничителя грузового момента отключается электромагнит упомянутого распределителя. При этом управляющее давление в гидромагистралях "б" и "м" становится равным нулю, сблокированные золотники трехпозиционных распределителей 7, 11 устанавливаются пружинами в нейтральное положение. Гидромотор 1 останавливается и затормаживается гидроцилиндром тормоза 2, люлька насоса 42 устанавливается в исходное положение, расход насоса становится равным нулю.
Аналогично операции поворота платформы посредством насоса 42 осуществляют выдвижение подвижных секций телескопической стрелы крана, подъем стрелы крана и подъем груза посредством насоса 43.
При выдвижении-втягивании подвижных секций телескопической стрелы крана машинист устанавливает рукоятку блока управления 25 в положение B2 или B4 соответственно. При этом переменное давление управления поступает к трехпозиционному распределителю 8 по каналам управления соответственно "в", "г" и к гидроцилиндру 61 системы управления насоса 43 через клапаны ИЛИ 47, 50, 51 по магистрали "н". В случае превышения допускаемого грузового момента при выдвижении стрелы безопасность работы крана обеспечивается ограничителем грузового момента путем отключения электромагнита двухпозиционного распределителя 18. На операции втягивания стрелы защита крана от превышения допускаемого грузового момента не предусмотрена, т.к. в этом случае превышения грузового момента не возникает.
При подъеме-опускания стрелы крана машинист устанавливает рукоятку блока управления 26 в положение B1 или B3 соответственно. При этом переменное давление управления поступает в трехпозиционному распределителю 9 по каналам управления соответственно "д", "е" и к гидроцилиндру 61 системы управления насоса 43 через клапаны ИЛИ 48, 50, 51 по магистрали "н". В случае превышения допускаемого грузового момента при подъеме-опускании стрелы безопасность работы крана обеспечивается ограничителем грузового момента путем отключения двухпозиционных распределителей соответственно 19, 20.
При подъеме-опускании груза машинист устанавливает рукоятку блока управления 26 в положение B2 или B4. При этом переменное давление управления поступает к трехпозиционному распределителю 10 по каналам управления соответственно "ж", "и" и к гидроцилиндру 61 системы управления насоса 43 через клапана ИЛИ 49, 51 по магистрали "н". В случае превышения допускаемого грузового момента при подъеме-опускании груза безопасность работы крана обеспечивается ограничителем грузового момента путем отключения двухпозиционных распределителей соответственно 21, 22.
Гидравлический привод стрелового самоходного крана обеспечивает совмещение следующих операций (для различия направления поворота платформы ниже используются условные термины "поворот платформы вправо" и "поворот платформы влево"):
а) поворот платформы вправо - выдвижение стрелы;
б) поворот платформы влево - выдвижение стрелы;
в) поворот платформы вправо - втягивание стрелы;
г) поворот платформы влево - втягивание стрелы;
д) поворот платформы вправо - подъем стрелы;
е) поворот платформы влево - подъем стрелы;
ж) поворот платформы вправо - опускание стрелы;
и) поворот платформы влево - опускание стрелы;
к) поворот платформы вправо - подъем груза;
л) поворот платформы влево - подъем груза;
м) поворот платформы вправо - опускание груза;
н) поворот платформы влево - опускание груза.
Совмещение рабочих операций обеспечивается путем установки рукоятки управления блока 25 в промежуточное положение и включением тем самым одновременно двух золотников упомянутого блока управления или путем комбинации положений рукояток управления блоков 25, 26.
Конкретно для совмещения рабочих операций по пункту "а" рукоятку управления блока 25 устанавливают в промежуточное положение между B1 и B2; по пункту "б" - в промежуточное положение между B3 и B2; по пункту "в" - в промежуточное положение между B1 и B4; по пункту "г" - в промежуточное положение между B3 и B4; по пункту "д" рукоятки управления блоков 25, 26 устанавливают каждую в положение B1; по пункту "е" рукоятку блока управления 25 устанавливают в положение B3, а рукоятку управления блока 26 - в положение B1; по пункту "ж" рукоятку блока управления 25 устанавливают в положение B1, а рукоятку управления блока 26 - в положение B2, по пункту "и" рукоятки управления блоков 25, 26 устанавливают каждую в положение B3; по пункту "к" рукоятку управления блока 25 устанавливают в положение B1, а рукоятку управления блока 26 - в положение B2; по пункту "л" рукоятку блока управления 25 устанавливают в положение B3, а рукоятку управления блока 26 - в положение B2; по пункту "м" рукоятку блока 25 устанавливают в положение B1, а рукоятку управления блока 26 - в положение B4; по пункту "н" рукоятку управления блока 25 устанавливают в положение B3, а рукоятку блока управления 26 - в положение B4.
Совмещение рабочих операций, например поворота платформы вправо и выдвижения стрелы, осуществляется следующим образом. Машинист крана устанавливает рукоятку управления блока 25 в положение промежуточное между положениями B1 и B2. При этом одновременно включаются два смежных золотника B1 и B2 четырехзолотникового блока 25. Переменное давление управления по магистрали 27 через канал управления "а" поступает к трехпозиционному распределителю 7, золотник которого сблокирован с золотником трехпозиционного распределителя 11, а через клапан ИЛИ 46 по магистрали "м" - к гидроцилиндру 61 системы управления насоса 42. В результате этого золотник трехпозиционного распределителя 7 совместно с золотником трехпозиционного распределителя 11 перемещается до упора, и жидкость от насоса управления 35 через трехпозиционный распределитель 11 поступает в гидроцилиндр 2 тормоза гидромотора 1 и растормаживает последний. От насоса 42 к гидромотору 1 начинает поступать расход, изменяющийся в зависимости от угла наклона рукоятки управления блока 25, при этом платформа крана начинает поворачиваться вправо со скоростью, изменяющейся пропорционально расходу насоса 42. Одновременно переменное давление управления по магистрали 29 через канал управления "в" поступает к трехпозиционному распределителю 8. а через клапаны ИЛИ 47, 50, 51 по магистрали "н" - к гидроцилиндру 61 системы управления насоса 43. От насоса 43 к гидроцилиндру 3 механизма выдвижения стрелы начинает поступать расход, изменяющийся в зависимости от угла наклона рукоятки управления блока 25, при этом начинается выдвижение подвижных секций телескопической стрелы со скоростью, изменяющейся пропорционально расходу насоса 43. При совмещении данных рабочих операций безопасность работы крана в случае превышения допускаемого грузового момента обеспечивается ограничителем грузового момента путем отключения двухпозиционного распределителя соответственно 16 или 18.
Подобным же образом осуществляются совмещение и других рабочих операций. Благодаря тому что на каждой из совмещаемых рабочих операций используется свой насос, совмещение операций обеспечивается независимо от величины нагрузки на каждый исполнительный гидродвигатель.
При работе гидравлического привода крана, когда температура жидкости (масла) соответствует диапазону ее рабочих температур (например, от минус 20 до плюс 50oC), электромагниты двухпозиционных распределителей 23, 24 включены и каналы управления "к", "л" заперты. При этом предохранительные клапаны 13, 14 работают как обычные предохранительные клапаны, настроенные на определенное давление. В случае если температура масла в баке 54 выйдет за пределы допустимой, срабатывает установленный в баке датчик 55 температуры, по сигналу которого включаются электромагниты двухпозиционных распределителей 23, 24, при этом каналы управления "к", "л" предохранительных клапанов соответственно 13, 14 соединяются со сливной магистралью 52 и упомянутые клапаны переходят на режим разгрузки. Если машинист включит насосы гидравлического привода, то весь расход насосов через находящиеся в режиме разгрузки предохранительные клапаны 13, 14 пойдет в бак 54, а исполнительные гидродвигатели работать не будут.
Таким образом, благодаря особенности исполнения гидравлического привода стрелового самоходного крана, изобретение обеспечивает возможность совмещения рабочих операций независимо от величины нагрузки на каждый исполнительный гидродвигатель, защиту привода от перегрузки в случае превышения допускаемого грузового момента при выполнении любой рабочей операции, а также повышение КПД привода. Кроме того, изобретение позволяет повысить надежность гидравлического привода благодаря тому, что исключена возможность поломки насосов в случае их запуска, когда температура масла выходит за границы допустимой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| Гидравлический привод стрелового самоходного крана | 1983 |
|
SU1235814A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128790C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| Гидравлический привод механизма поворота платформы стрелового самоходного крана | 1984 |
|
SU1229169A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
Изобретение относится к подъемно-транспортному машиностроению и касается гидравлического привода стреловых кранов большой грузоподъемности. Привод содержит гидроцилиндры соответственно механизмов выдвижения и подъема стрелы, снабженные тормозами с гидроцилиндрами гидромоторы соответственно поворота платформы и грузовой лебедки, сообщенные через соответствующие трехпозиционные распределители с источником питания и баком. Через блоки клапанов сервоуправления посредством магистралей полости управления трехпозиционных гидрораспределителей сообщены с насосом управления. Обе полости управления трехпозиционных гидрораспределителей гидроцилиндра механизмов выдвижения стрелы гидромотор соответственно поворота платформы и грузовой лебедки, а также одна из полостей управления трехпозиционных гидрораспределителей гидроцилиндра подъема стрелы сообщены с баком посредством дополнительной магистрали, каждая через свой двухпозиционный распределитель с электромагнитным управлением в одной его позиции и двухпозиционный распределитель с электромагнитным управлением связаны с ограничителем грузового момента. Полости управления трехпозиционных гидрораспределителей сообщены с соответствующими двухпозиционными распределителями с электромагнитным управлением каждая по меньшей мере через один клапан ИЛИ. Источник питания представляет собой два аксиально поршневых насоса. Технический результат - возможность совмещения рабочих операций независимо от величины нагрузки, защита привода от перегрузки, повышение КПД привода. 2 з.п.ф-лы, 3 ил.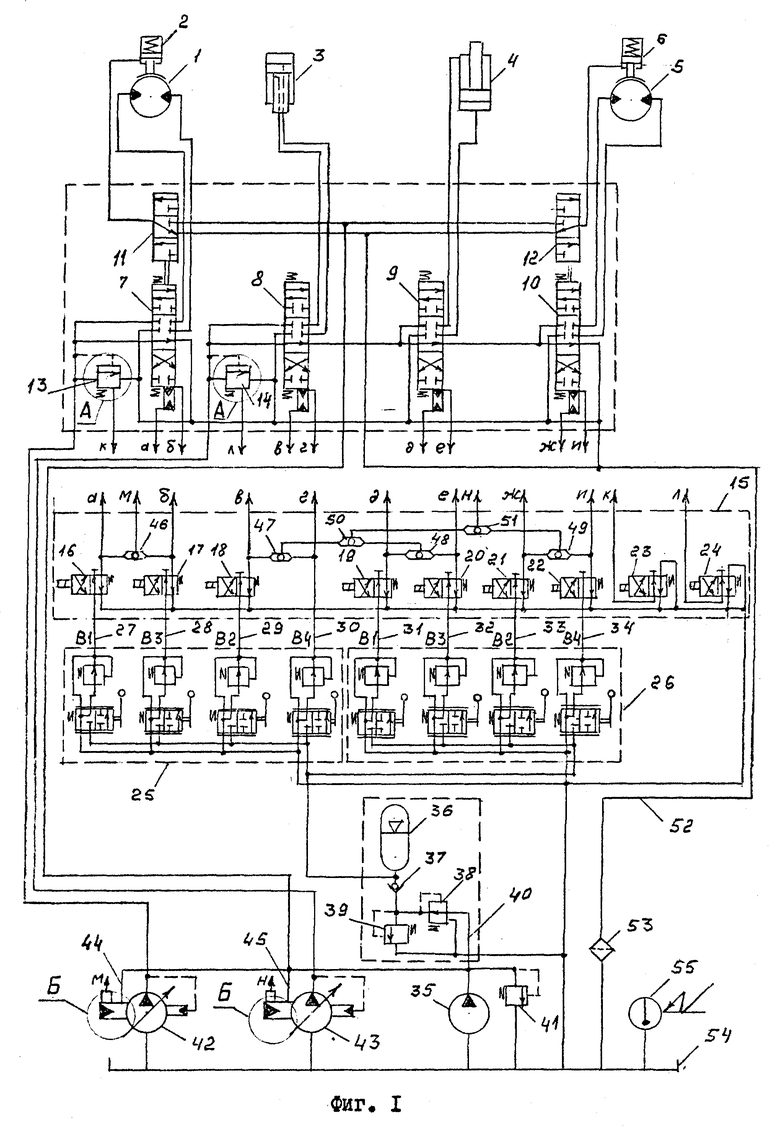
| Гидравлический привод стрелового самоходного крана | 1983 |
|
SU1235814A1 |
| Гидравлический привод стрелкового самоходного крана | 1972 |
|
SU449872A1 |
| Гидравлический привод стрелового самоходного крана | 1972 |
|
SU455910A1 |
| Гидравлический привод стрелового самоходного крана | 1976 |
|
SU608750A1 |
| Гидропривод стрелового самоходного крана | 1978 |
|
SU680981A1 |
| Гидропривод механизмов стреловогоСАМОХОдНОгО KPAHA | 1979 |
|
SU823263A1 |
| Гидропривод стрелового самоходного крана | 1985 |
|
SU1245543A1 |
| SU 1500613 A1, 15.08.89. | |||

