Изобретение относится к горному делу, а именно к механизированному креплению очистных забоев при подземной добыче полезных ископаемых.
Известна секция механизированной крепи, включающая гидростойки, два основания, между которыми размещен механизм перемещения, ограждение, установленное шарнирно на перекрытии и связанное с основаниями посредством, по крайней мере, двух пар рычагов, в каждой из которых рычаги размещены симметрично относительно плоскости симметрии секции и шарнирно закреплены на ограждении и основаниях. С завальной стороны от механизма перемещения установлена тяга, шарнирно связывающая основания между собой (заявка ФРГ OS 3400771. Публикация 18.07.85. Приоритет 12.1.84).
Все признаки аналога, за исключением шарнирного соединения оснований в завальной зоне тягой, совпадают с признаками изобретения.
Шарнирное соединение оснований в завальной части между собой посредством тяги во взаимодействии со связью в их забойной части обеспечивает постоянство расстояния между основаниями. Это обусловлено требованиями кинематической и силовой стабильности конструкции секции крепи, а также - функционирования механизма перемещения, размещенного между основаниями.
К недостаткам конструкции относится то, что расположение тяги, соединяющей основания, позади механизма перемещения ограничивает ход перемещения секции. Причем это ограничение особенно негативно сказывается в конструкциях современных однорядных двухстоечных крепей, имеющих относительно короткое основание. При указанном расположении тяги в этих секциях становится невозможной оптимальная конструктивная схема секции крепи, при которой она перемещается на забой усилием раздвижки гидродомкрата перемещения. Вместо этого передвижка секции осуществляется при складывании гидродомкрата перемещения, что приводит к снижению усилия передвижки в 1,5-1,7 раза (см., например, "Крепь Глиник-055/15-Оз. Руководство по эксплуатации". г. Горлице (Польша), 1998 г. - 53с.).
Кроме того, для обеспечения необходимого взаимного смещения оснований по вертикали (т.н. "потаптывания" оснований друг относительно друга) требуется, чтобы соединение оснований посредством тяги обеспечивало шарнирность в двух плоскостях. Это обусловлено тем, что при "потаптывании" основания, связанные рычагами с ограждением, совершают плоскопараллельное движение, в котором, помимо смещения, присутствует и взаимный разворот. Необходимость двойного шарнира в соединении оснований усложняет его конструкцию, соответственно, снижая надежность.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является секция механизированной крепи, включающая гидростойки, два основания, между которыми размещен механизм перемещения, ограждение, установленное шарнирно на перекрытии и связанное с основаниями посредством, по крайней мере, двух пар рычагов, в каждой из которых рычаги размещены симметрично относительно плоскости симметрии секции и шарнирно закреплены на ограждении и основаниях. Основания связаны между собой в завальной зоне тягой с двойным шарниром, расположенной над механизмом перемещения (см. Комплекс очистной КМК-500Т. Руководство по эксплуатации КМК500Т.00.00.000 РЭ. АО "ПНИУИ", Россия, 1996. - 49с.).
Все признаки прототипа, за исключением соединения оснований в завальной части тягой с двойным шарниром, совпадают с признаками изобретения.
В сравнении с аналогом тяга с двойным шарниром обеспечивает большую свободу в перемещении ("потаптывании") оснований друг относительно друга. Размещение тяги над механизмом перемещения позволяет не ограничивать его ход и использовать конструктивную схему секции крепи, в которой ее передвижка производится усилием раздвижки гидродомкрата перемещения.
Недостатком конструкции прототипа является большая высота оснований, обусловленная необходимостью клиренса по вертикали между тягой и механизмом перемещения, совершающего в процессе работы крепи возвратно-поступательное движение относительно тяги. Отметим, что величина клиренса определяется с учетом возможного проседания оснований в почву и "всплытия" механизма перемещения на угольный и породный штыб. Отсутствие необходимого клиренса может привести к отказу и поломке механизма либо тяги. В то же время увеличение высоты оснований существенно сужает диапазон использования крепи по мощности пластов, повышая его минимальную границу.
Другим недостатком прототипа является сложность и недостаточная надежность конструкции тяги с двойным шарниром. Тяга, размещенная между основаниями, соединена с одним из оснований посредством шарнира с вертикальной осью, а с другим - шарниром с горизонтальной осью. Вследствие этого взаимное смещение оснований по вертикали ограничивается шарниром с вертикальной осью, а смещение по горизонтали - шарниром с горизонтальной осью. При этом оси крепления рычагов к основанию, на которых размещены шарнирные соединения тяги с основаниями, не обеспечивают дополнительной развязки, поскольку уже после непродолжительного периода эксплуатации в шахтных условиях под действием значительных нагрузок их поворот в отверстиях основания становится практически невозможен.
В основу изобретения поставлена задача создания секции механизированной крепи, в которой путем изменения конструкции и характера связей между узлами секции, размещенными по обе стороны от ее плоскости симметрии, обеспечивается уменьшение высоты оснований и расширение диапазона использования крепи по мощности пластов, а также повышение надежности связей между узлами секции и, соответственно, надежности секции крепи в целом.
Поставленная задача решается за счет того, что в секции механизированной крепи, включающей гидростойки, два основания, между которыми размещен механизм перемещения, ограждение, установленное шарнирно на перекрытии и связанное с основаниями посредством, по крайней мере, двух пар рычагов, в каждой из которых рычаги размещены симметрично относительно плоскости симметрии секции и шарнирно закреплены на ограждении и основаниях, согласно изобретению, рычаги одной из пар соединены между собой посредством тяги, концы которой шарнирно связаны с этими рычагами. При этом в отдельных случаях исполнения секции оси шарнирных связей тяги с рычагами проходят через ось шарниров крепления этих рычагов к ограждению.
Существенные отличительные признаки изобретения: соединение одной из пар рычагов посредством тяги, концы которой шарнирно связаны с этими рычагами (см., например, фиг.1, 2). Указанные признаки во взаимодействии с известными признаками позволяют, сохраняя достоинства решения-прототипа, увеличить клиренс по вертикали между тягой и механизмом перемещения при минимально необходимой высоте основания. Это расширяет диапазон использования секции крепи по мощности пластов, снижая его минимальную границу. При этом надо отметить, что с увеличением мощности пласта рычаги, на которых размещена тяга, поворачиваются, увеличивая тем самым клиренс.
Кроме того, установка тяги на рычагах уменьшает, по сравнению с прототипом, относительное смещение концов тяги при "потаптывании" оснований (ср., например, кинематические схемы на фиг.3 и 4) и позволяет использовать ординарное шарнирное соединение тяги с рычагами вместо двойного шарнира. Таким образом, повышается надежность связей между узлами секции и, соответственно, надежность работы секции крепи в целом.
Применяемое в отдельных случаях выполнения секции крепи расположение оси шарнирных связей тяги с рычагами таким образом, чтобы она проходила через общую ось шарниров крепления этих рычагов к ограждению, позволяет при "потаптывании" оснований (см., например, фиг.4) минимизировать угловое рассогласование тяги и мест ее крепления на рычагах. Тем самым повышается надежность связи между рычагами, соединенными тягой.
На фиг.1 показан пример выполнения секции крепи согласно изобретению.
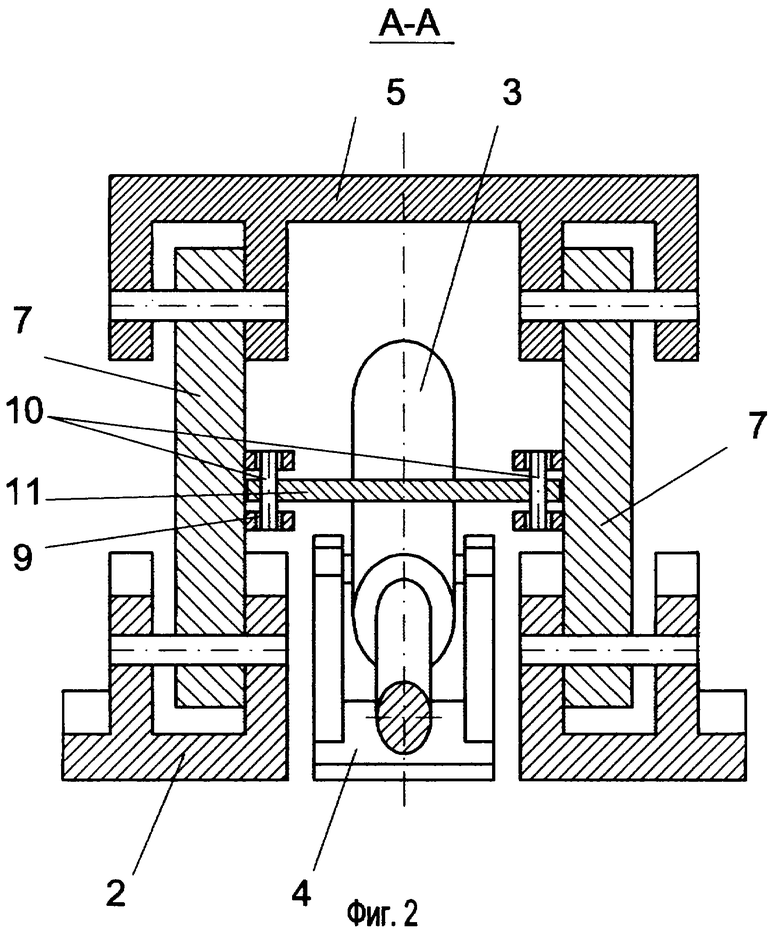
На фиг.2 показано сечение А-А фиг.1.
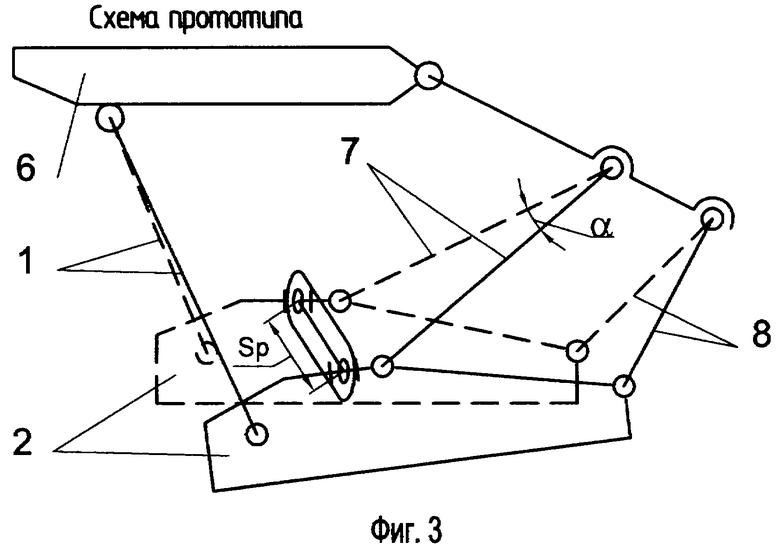
На фиг. 3 показана кинематическая схема секции крепи-прототипа в положении с основаниями, размещенными на разной высоте (при "потаптывании" оснований),
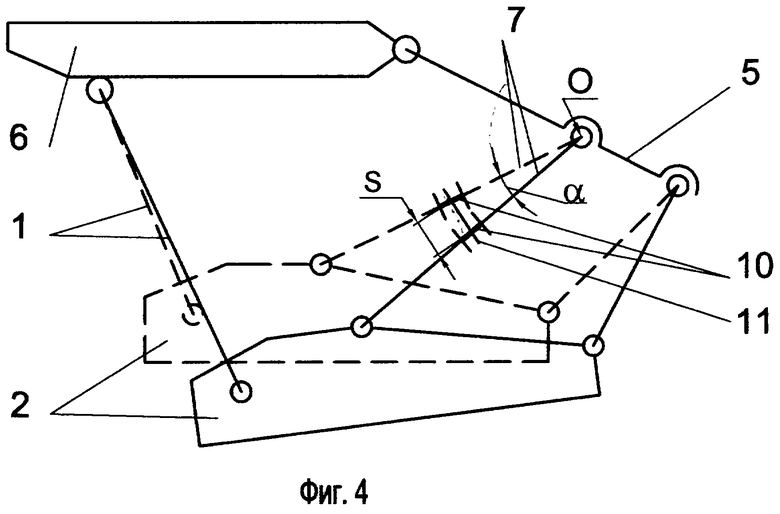
На фиг.4 показана кинематическая схема секции крепи согласно изобретению в положении с основаниями, размещенными на разной высоте (при "потаптывании" оснований).
Пример выполнения секции механизированной крепи (см. фиг.1, 2) включает гидростойки 1 и два основания 2, между которыми размещены гидродомкрат 3 и толкатель 4 механизма перемещения. Ограждение 5, закреплено шарнирно на перекрытии 6 и связано с основаниями посредством двух пар рычагов 7 и 8, в каждой из которых рычаги размещены симметрично относительно плоскости симметрии секции. Каждый из рычагов 7 снабжен отверстием 9, в котором размещена ось 10. Рычаги 7 соединены между собой посредством тяги 11, концы которой шарнирно связаны с этими рычагами через оси 10.
Секция механизированной крепи работает следующим образом. В транспортном положении с минимальным габаритом секции по высоте (при полностью сложенной секции) гидростойки 1 сложены до минимального размера, гидродомкрат 3 сложен, толкатель 4 выдвинут. Ограждение 5, перекрытие 6 и тяга 11 находятся в крайнем нижнем положении. Клиренс между тягой 11 и гидродомкратом 3 - минимальный.
При распоре гидростоек 1 перекрытие 6 и забойный край ограждения 5 поднимаются. Рычаги 7 поворачиваются в шарнирах оснований 2 и ограждения 5. Тяга 11 при этом поднимается, увеличивая тем самым клиренс между собой и гидродомкратом 3. При посадке секции перед передвижкой гидростойки 1 складываются, перекрытие 6 и забойный край ограждения 5 опускаются. Рычаги 7 поворачиваются, опуская тягу 11. Однако при этом высота секции, как и высота расположения тяги, больше, чем при полностью сложенной секции. Таким образом, клиренс между тягой 11 и гидродомкратом 3 больше минимального.
Перемещение секции крепи осуществляется посредством раздвижки гидродомкрата. При этом толкатель 4 и цилиндр гидродомкрата 3 зафиксированы, а секция вместе со штоком гидродомкрата 3 выдвигается к забою. Тяга 11 вместе с секцией свободно движется над гидродомкратом 3 и толкателем 4 механизма перемещения.
При всплытии или проседании в почву одного из оснований 2 (см. кинематическую схему на фиг.4) соответствующий рычаг 7 поворачивается. Между рычагами 7, образуется угол α с вершиной в шарнире ограждения 5, с которым связаны рычаги 7. Тяга 11 поворачивается вокруг осей 10, размещенных на разных рычагах 7, компенсируя этим взаимное смещение S осей 10.
Повышение надежности работы связи между узлами секции, размещенными по обе стороны от ее плоскости симметрии, в сравнении с прототипом обусловлено двумя факторами (см. фиг.3, 4). Во-первых, величина смещения S меньше, чем смещение между шарнирами крепления прототипа Sp, расположенными на основании. Во-вторых, оси 10 смещаются по дуге окружностей с центром в т.О и их положение и направленность не увязаны с положением оснований, совершающих плоскопараллельное движение.
Оптимальные условия работы связи между рычагами достигаются при выполнении секции с расположением оси шарнирных связей тяги с рычагами таким образом, чтобы они проходили через общую ось шарниров крепления этих рычагов к ограждению (т. О на фиг.4). Это обусловлено тем, что проседание в почву одного из оснований 2, обуславливает разворот рычагов 7 вокруг т.О и соответствующий пространственный разворот тяги 11 в шарнирных соединениях ее с рычагами. При этом ось пространственного поворота тяги 11 в каждой из шарнирных связей ее с рычагами максимально приближена к оси симметрии этого соединения, определяемой осью 10. Вследствие этого величина необходимой угловой развязки тяги 11 в ее соединении с осью 10 - минимальна. Это, с одной стороны, позволяет минимизировать зазоры в шарнирных связях тяги с рычагами, обеспечивая тем самым максимальную стабильность расстояния между рычагами 7 и основаниями 2. А с другой стороны - позволяет практически исключить вероятность возникновения в этих связях скручивающих нагрузок, ось которых не совпадает с осью шарнирных связей, что повышает надежность их работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215155C2 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215156C2 |
| Механизированная закладочная крепь | 1990 |
|
SU1796030A3 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2002 |
|
RU2215154C1 |
| Секция механизированной крепи | 2001 |
|
RU2219344C2 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215152C2 |
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219348C2 |
| Механизированный комплекс | 1986 |
|
SU1507986A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1996 |
|
RU2134352C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ | 1996 |
|
RU2141032C1 |
Изобретение относится к горному делу и может использоваться в механизированном креплении очистных забоев при подземной добыче полезных ископаемых. Задачей изобретения является обеспечение уменьшения высоты оснований и расширение диапазона использования крепи по мощности пластов, повышение ее надежности. Секция механизированной крепи включает гидростойки, два основания, между которыми размещен механизм перемещения, ограждение, установленное шарнирно на перекрытии и связанное с основаниями посредством, по крайней мере, двух пар рычагов, в каждой из которых рычаги размещены симметрично относительно плоскости симметрии секции и шарнирно закреплены на ограждении и основаниях. Рычаги одной из пар соединены между собой посредством тяги, концы которой шарнирно связаны с этими рычагами. Оси шарнирных связей тяги с рычагами могут проходить через общую ось шарниров крепления этих рычагов к ограждению. 1 з.п. ф-лы, 4 ил.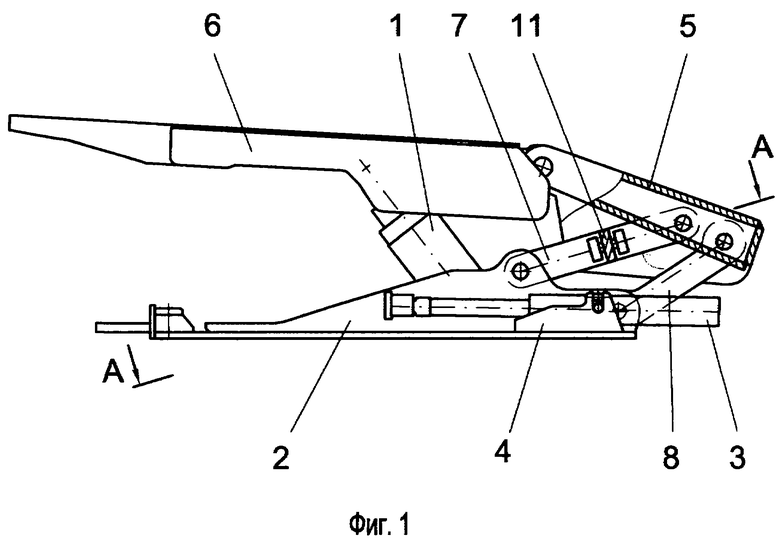
| US 4027489 A, 07.06.1977 | |||
| Секция механизированной крепи | 1985 |
|
SU1298392A1 |
| Секция механизированной крепи | 1987 |
|
SU1566042A1 |
| Секция механизированной крепи | 1975 |
|
SU641115A2 |
| SU 1529837 A1, 20.04.1996 | |||
| Секция механизированной крепи | 1982 |
|
SU1059207A1 |

