Изобретение относится к горному делу, а именно к механизмам перемещения секций механизированной крепи и конвейера с навесным оборудованием (далее по тексту - конвейера) в комплексах для подземной добычи полезных ископаемых.
Известен механизм перемещения секции крепи, содержащий гидродомкрат передвижки, который присоединяется шарнирно к основанию секции, и толкатель, размещенный в основании секции и соединенный с рештаком конвейера горизонтально расположенной осью, проходящей через наклонный паз, выполненный в рештаке. При этом нижний конец паза расположен позади верхнего конца относительно направления перемещения (Патент ФРГ. Публикация 85.07.18. № 29 Int. Cl E 21 D 23|04. DE 3401009 A1. Schreitwerksanordnung fur schildaus-bangestelle. см. также с.36 сборника "Изобретения стран мира". Реферативная информация. Выпуск 84. МКИ E 21, № 3 - М., 1986. - 55с).
Такое исполнение механизма позволяет при перемещении конвейера обеспечить необходимые величины плеча приложения усилия перемещения относительно забойной кромки лемеха и соответствующего опрокидывающего момента. Под действием указанного момента завальный борт конвейера при его перемещении приподнимается, увеличивая тем самым составляющую веса конвейера, воспринимаемую забойной кромкой лемеха. Увеличение усилия, прижимающего лемех к почве, улучшает условия погрузки угля на конвейер, осуществляемой при перемещении конвейера, и препятствует заезду конвейера на штыб, происходящему при отрыве лемеха от почвы.
В то же время, данное решение не позволяет обеспечить возможность смещения конвейера относительно крепи вдоль лавы, необходимую при волнообразном передвижении конвейера на забой, т.к. ось шарнира, непосредственно связывающего толкатель с конвейером, расположена параллельно линии фронта лавы. Отсутствие возможности смещения конвейера относительно крепи приводит к поломкам механизмов перемещения и порывам соединений между толкателем и конвейером.
Наиболее близким к изобретению по технической сущности является механизм перемещения секций крепи и конвейера, содержащий соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством вертикально расположенной оси шарнирно закреплено звено с эксцентриком, расположенным с возможностью контакта с поверхностью конвейера, и пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера (патент Великобритании № 2216941, кл. E 21 D 23/08, публ. 18.10.1989). При этом ось секции конвейера, связывающая ее со звеном, расположена горизонтально, а эксцентрик размещен на вертикальной забойной грани звена с возможностью контакта с опорной поверхностью на вертикальной стенке конвейера в зоне выше оси секции конвейера.
Это решение так же, как и первое, позволяет при перемещении конвейера обеспечить достаточно большую величину плеча приложения усилия перемещения относительно забойной кромки лемеха и соответствующего момента, приподнимающего завальный борт конвейера. Причем достигается это, в отличие от первого решения, без подъема всего толкателя, что позволяет сохранить рабочее пространство для прохода людей.
Однако в нем практически сохраняется и недостаток первого, заключающийся в необеспечении достаточной величины смещения конвейера относительно крепи вдоль лавы (110-150 мм в каждую сторону), необходимой при волнообразном передвижении конвейера на забой. Это обусловлено тем, что звено связано с конвейером посредством горизонтальной оси, что существенно ограничивает возможность углового отклонения звена относительно секции конвейера в горизонтальной плоскости несмотря на наличие шарнира с вертикальной осью, соединяющего звено с толкателем.
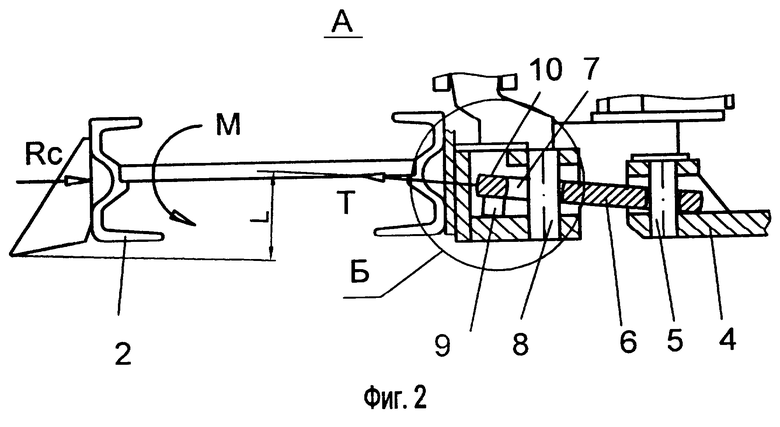
Кроме того, в устройстве-прототипе не решен вопрос о регулировке величины плеча L, усилия перемещения Т и момента М, приподнимающего завальный борт конвейера для конкретных условий эксплуатации. Следствием недостаточной величины момента М является то, что при перемещении конвейера на забой опрокидывающий момент, создаваемый противодавлением массива отбитого угля на забойный борт конвейера (см. фиг. 1,2), приводит к отрыву лемеха от почвы и заезду конвейера на штыб. В результате этого не только остается непогруженной часть отбитого угля, но образуемая таким образом на почве т.н. "штыбовая подушка" и "всплытие" на нее конвейера приводят к ухудшению управляемости и эффективности работы выемочного комбайна, размещенного на конвейере, а также - механизированной крепи. В то же время завышенная величина момента М приводит к "врезанию" лемеха конвейера в почву пласта и повышению сопротивления передвижке, особенно при наличии нарушений по почве пласта, и, соответственно, к снижению надежности и долговечности механизма перемещения. Кроме того, это существенно затрудняет управление конвейером и размещенным на нем комбайном в профиле пласта, создавая тенденцию к подрубке почвы и препятствуя выходу конвейера из углублений на почве.
Еще одним недостатком прототипа является заштыбовка места соединения звена с конвейером. В частности, заштыбовка зазоров между боковыми вертикальными гранями звена и охватывающими их гранями стенок конвейера делает еще меньше угловую развязку звена относительно конвейера в горизонтальной плоскости, что, как указывалось выше, приводит к отказам и поломкам механизма в месте соединения звена с конвейером.
В основу изобретения поставлена задача создания механизма перемещения секций крепи и конвейера, в котором путем изменения характера связей и взаимного расположения элементов обеспечивается угловая развязка звена относительно конвейера в горизонтальной плоскости, необходимая для предотвращения поломок механизма при волнообразном передвижении конвейера на забой, а также обеспечивается возможность регулирования и выбора целесообразных для конкретных горно-геологических условиях величин плеча L, усилия перемещения Т и момента М, приподнимающего завальный борт конвейера. Благодаря этому обеспечивается возможность эффективного управления конвейером в профиле пласта и повышение надежности и долговечности механизма перемещения.
Поставленная задача решается за счет того, что в механизме перемещения секций крепи и конвейера, содержащем соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством вертикально расположенной оси шарнирно закреплено звено с эксцентриком, расположенным с возможностью контакта с поверхностью конвейера, и пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера, согласно изобретению паз в звене выполнен продольным, ось на секции конвейера расположена вертикально. Эксцентрик размещен у конвейерного края звена несимметрично относительно горизонтальной плоскости симметрии звена, а звено расположено с возможностью осуществления плоскопараллельного движения в процессе волнообразного перемещения става конвейера. При этом звено с эксцентриком размещено с возможностью изменения его положения посредством поворота на 180° вокруг оси симметрии звена.
В отдельных случаях выполнения механизма перемещения предлагается размещение на вертикально расположенной оси толкателя шайбы с возможностью контакта с горизонтальными поверхностями толкателя и звена.
Во взаимодействии с известными признаками существенные отличительные признаки: выполнение паза в звене продольным, расположение оси на секции конвейера вертикально и расположение эксцентрика у конвейерного края звена несимметрично относительно горизонтальной плоскости симметрии звена, расположение звена с возможностью плоскопараллельного движения в процессе волнообразного перемещения става конвейера, а также размещение звена с эксцентриком с возможностью изменения его положения посредством поворота на 180° вокруг оси симметрии звена - позволяют обеспечить угловую развязку звена относительно конвейера в горизонтальной плоскости, необходимую для предотвращения поломок механизма при волнообразном передвижении конвейера на забой, а также обеспечить возможность регулирования и выбора целесообразных для конкретных горно-геологических условий величин плеча L, усилия перемещения Т и момента М, приподнимающего завальный борт конвейера.
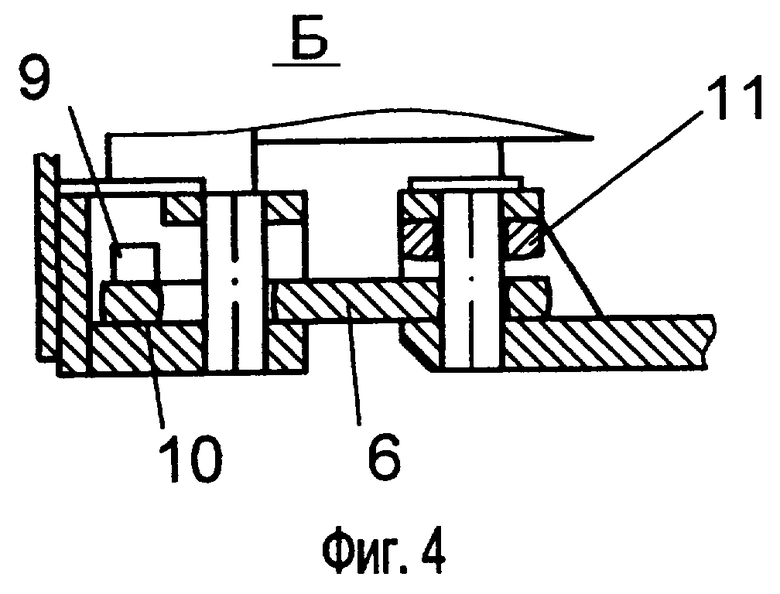
При этом регулировка плеча L конкретного механизма перемещения производится посредством переворачивания звена на 180° вокруг оси симметрии звена (см. фиг. 2, 4). Более точный выбор указанных параметров силового воздействия на отрезок конвейера при его перемещении осуществляется посредством применения различных сочетаний расположения звеньев на механизмах перемещения, взаимодействующих с данным отрезком конвейера. Кроме того, наличие эксцентрика на поверхности звена, постоянно совершающего плоскопараллельное движение, приводит к расштыбовке зоны шарнирных соединений звеньев с секциями конвейера. В результате вышеуказанного обеспечивается возможность эффективного управления конвейером и повышение надежности и долговечности механизма перемещения, т.е. достигается требуемый технический результат.
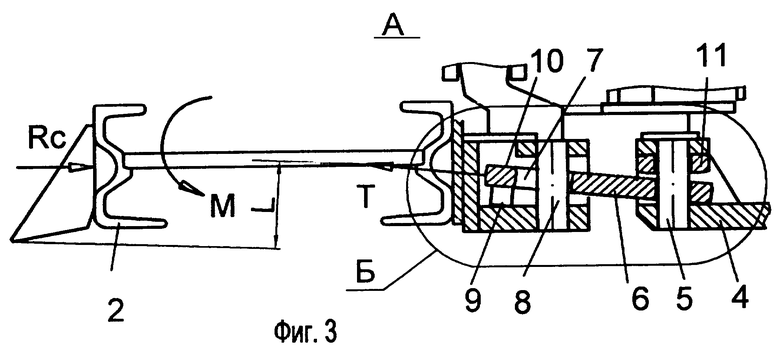
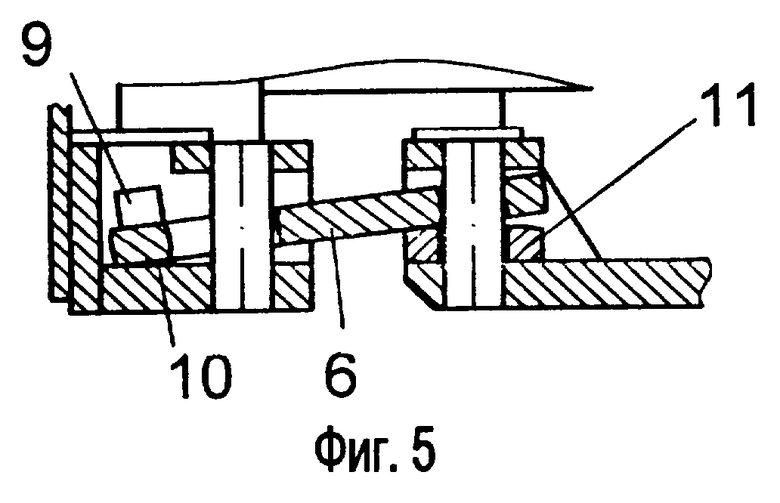
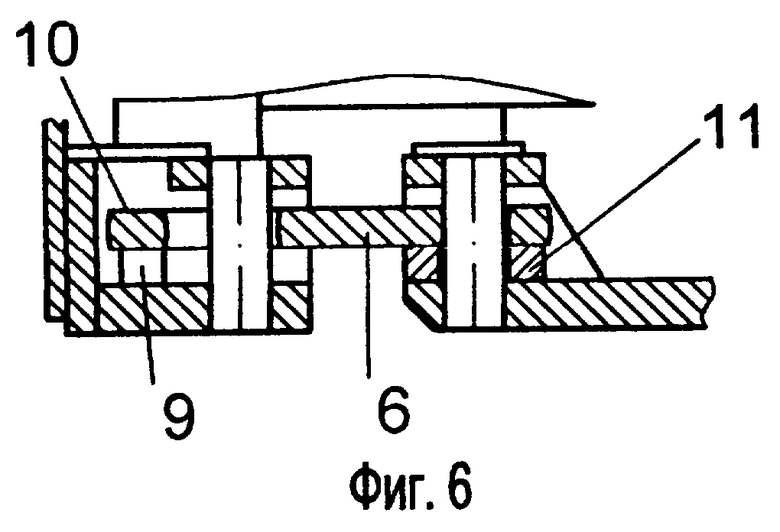
В отдельных случаях выполнения механизма перемещения, например в условиях сложной, переменной гипсометрии пласта, при наличии порогов и углублений на почве, предлагается размещение на вертикально расположенной оси толкателя шайбы с возможностью контакта с горизонтальными поверхностями толкателя и звена. Это позволяет расширить возможности регулировки величины плеча L, усилия перемещения конвейера путем увеличения количества возможных комбинаций элементов механизма до четырех (см. фиг. 3, 4, 5, 6). Кроме того, расширяется возможность варьирования параметрами угловой развязки звена относительно толкателя в вертикальной плоскости, что позволяет снизить вероятность расклинки звена на оси толкателя и возникновения поломки.
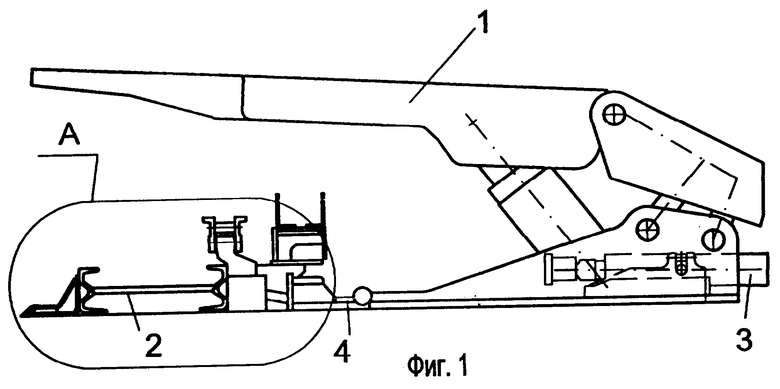
На фиг. 1 показан пример исполнения механизма перемещения секций крепи и конвейера согласно изобретению. На фиг. 2 показан вид А фиг. 1, а также силы и моменты, действующие на передвигаемую секцию конвейера. На фиг. 3 показан механизм перемещения в частном случае выполнения с шайбой, размещенной между звеном и толкателем. На фиг. 4, 5, 6 показаны виды Б фиг.3 с вариантами различного расположения звена с эксцентриком и шайбы.
Механизм перемещения секций крепи 1 и конвейера 2 (фиг. 1, 2) содержит соединенные между собой гидродомкрат передвижки (ГП) 3, связанный с секцией крепи 1, и толкатель 4, на котором посредством вертикально расположенной оси 5 шарнирно закреплено соединительное звено 6 с продольным пазом 7, связанным посредством вертикально расположенной оси 8 с секцией конвейера 2. Конвейерный край звена 6 снабжен эксцентриком 9, расположенным несимметрично относительно горизонтальной плоскости симметрии звена. При этом звено 6 с эксцентриком 9 размещено с возможностью изменения его положения посредством поворота на 180° вокруг оси симметрии звена 6. Таким образом, возможны два варианта расположения звена 6, в одном из которых оно размещено с возможностью контакта с нижерасположенной поверхностью конвейера 2 посредством более удаленной от горизонтальной плоскости симметрии звена 6 грани эксцентрика 9 (см. фиг. 2). В другом варианте звено размещено с возможностью контакта с нижерасположенной поверхностью конвейера 2 посредством менее удаленной от горизонтальной плоскости симметрии звена 6 грани 10 эксцентрика 9 (см. фиг. 4).
Механизм перемещения секций крепи и конвейера работает следующим образом.
Перемещение разгруженной секции крепи 1 осуществляется посредством раздвижки ГП (фиг. 1). При этом цилиндр ГП 3 и толкатель 4 со звеном 6 удаляются от забоя на длину паза 7, после чего происходит собственно перемещение секции крепи к конвейеру 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219346C2 |
| Механизм перемещения секций крепи и конвейера | 2001 |
|
RU2219347C2 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215153C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЫЕМОЧНОЙ МАШИНЫ | 2005 |
|
RU2291962C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2215156C2 |
| Секция механизированной крепи | 2001 |
|
RU2219344C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ КОНВЕЙЕРА И СЕКЦИИ КРЕПИ | 2006 |
|
RU2313670C1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ ЗАРУБНОЙ КОНВЕЙЕР | 2014 |
|
RU2574090C1 |
| КОМПЛЕКТНО-АГРЕГАТНАЯ МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1992 |
|
RU2015338C1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
Изобретение относится к горному делу и может использоваться в механизированных комплексах для подземной добычи полезных ископаемых. Задачей изобретения является предотвращение поломок механизма при волнообразном передвижении конвейера на забой и возможность регулирования усилия перемещения и других силовых параметров. Механизм перемещения секций крепи и конвейера содержит соединенные между собой гидродомкрат передвижки, связанный с секцией крепи, и толкатель, на котором посредством вертикально расположенной оси шарнирно закреплено звено с эксцентриком, расположенным с возможностью контакта с поверхностью конвейера, и с пазом, связанное посредством расположенной в этом пазу оси с секцией конвейера. Паз в звене выполнен продольным, ось на секции конвейера расположена вертикально, эксцентрик размещен у конвейерного края звена несимметрично относительно горизонтальной плоскости симметрии звена, а звено расположено с возможностью осуществления плоскопараллельного движения в процессе волнообразного перемещения става конвейера. Звено с эксцентриком размещено с возможностью изменения его положения посредством поворота на 1800 вокруг оси симметрии звена. На вертикально расположенной оси толкателя может быть размещена шайба с возможностью контакта с горизонтальными поверхностями толкателя и звена.1 з.п.ф-лы, 6 ил.
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ С ИСПОЛЬЗОВАНИЕМ СУШЁНОГО РАСТИТЕЛЬНОГО СЫРЬЯ | 2002 |
|
RU2216941C1 |

