Изобретение относится к спецсредствам для надевания на большие пальцы рук человека с целью ограничения свободы действий и может быть использовано правоохранительными органами в своей работе.
Известны наручники для надевания на запястья рук человека, содержащие поворотный дугообразный захват с храповыми зубьями, взаимодействующими с подпружиненной поворотной защелкой, имеющей хвостовик, фиксатор с упорами для взаимодействия с защелкой и ключом (US 1456846 А, 29.05.1923).
Недостатком таких наручников является сложность конструкции и недостаточная надежность при фиксации захвата. Кроме того, наручники, надеваемые на запястья рук, оставляют возможность использования кистей рук для противодействия, включая захват, удержание и применение холодного и стрелкового оружия, других предметов для осуществления противодействия.
Известны наручники для надевания на запястья рук, содержащие дуговой захват с храповыми зубьями, размещенное в корпусе средство фиксации захвата, образованное подпружиненной поворотной защелкой с хвостовиком и взаимодействующим с ней посредством упоров и установленным с возможностью продольного перемещения фиксатором и ключ для взаимодействия с фиксатором, выполненным в виде резьбового стержня с головкой под ключ (RU 2024720 С1, 15.12.1994).
Таким наручникам присущи приведенные выше недостатки, включая относительную свободу кистей рук и возможность активного противодействия с целью несанкционированного освобождения.
Известны наручники, надеваемые на большие пальцы, содержащие дугообразный захват с храповыми зубьями, размещенное в корпусе средство фиксации захвата, образованное подпружиненной поворотной защелкой, и ключ для взаимодействия с фиксатором, при этом корпус выполнен из двух частей, соединенных между собой, а дугообразный захват выполнен с характерным размером, необходимым ля размещения наручников на больших пальцах рук (RU 6015 U1, 16.02.1998).
Размещение наручников на больших пальцах рук обеспечивает наиболее эффективное ограничение свободы действий и практически исключает возможность противодействий.
Конструктивные недостатки наручников характеризуются тем, что они выполнены в виде миниатюрной конструкции наручников на запястья рук, близкой к конструкции по указанному выше патенту 2024720, а миниатюризация элементов захватных и фиксирующих элементов снижает их механическую прочность и надежность функционирования.
Известен наручник-колодка для размещения на больших пальцах рук, содержащий корпус из скрепленных между собой щек, подвижный захват с храповыми зубьями, поворотную защелку, опорную пружину и клуч (US 3146614 A, 01.09.1964).
В данном наручнике-колодке не устранены указанные выше недостатки.
Задачей изобретения является создание наручника-колодки, обеспечивающего получения технического результата, состоящего в упрощении конструкции, повышении технологичности изготовления, повышении надежности и расширении эксплуатационных возможностей при использовании в правоохранительных органах.
Этот технический результат в наручнике-колодке для размещения на больших пальцах рук, содержащих корпус из скрепленных между собой щек, подвижный захват с храповыми зубьями, поворотную защелку, опорную пружину и ключ, достигается тем, что он содержит фиксатор поворотной защелки, а щеки выполнены в виде Г-образной формы и образуют полый прямоугольный корпус, внутри которого размещен подвижный захват с пружиной возврата его в исходное открытое положение, при этом в плоскостях щек корпуса и метричной эллипсоподобной формы с характерными размерами больших пальцев рук с возможностью уменьшения площади сечения просветов отверстий одновременно в продольном и поперечном направлениях для замещения больших пальцев рук при встречном движении корпуса и подвижного захвата в процессе закрывания.
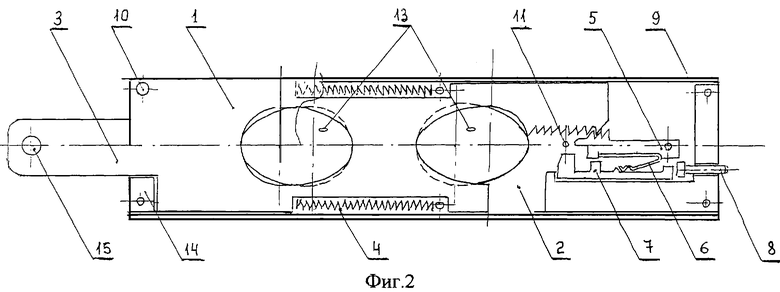
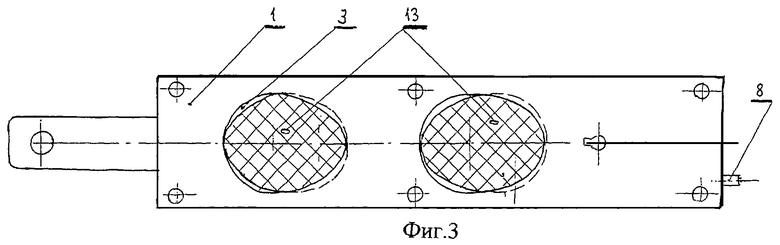
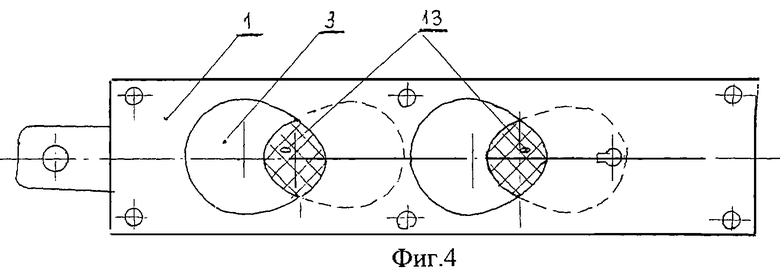
На фиг.1 изображен наручник-колодка в аксонометрии; на фиг.2. - то же, в положении "открыто" при частично снятой верхней щеке; на фиг.3. - форма и площадь сечения просвета (заштриховано) отверстий для больших пальцев рук в положении "открыто"; на фиг.4. - то же, в положении "закрыто".
Наручник-колодка выполнен в виде полого прямоугольного корпуса, образованного скрепленными между собой верхней 1 и нижней 2 щеками Г-образной формы, во внутренней полости которого размещены подвижный захват 3 с храповыми зубьями, пружина возврата 4 подвижного захвата в исходное положение "открыто", поворотная защелка 5, опорная пружина 6, фиксатор 7, толкатель 8, направляющая 9 фиксатора, заклепки 10.
Корпус имеет скважину 11 для ключа 12. В корпусе и в подвижном захвате 3 выполнены сквозные совмещенные отверстия 13 для размещения больших пальцев рук. В корпусе размещен вкладыш 14 и выполнено отверстие 15 для присоединения поводковой цепи.
Наручник-колодка работает следующим образом.
Закрывание. Наручник-колодка размещается на руках путем введения больших пальцев рук в отверстия 13, а затем подвижный захват 3 задвигается внутрь корпуса до положения, обеспечивающего защемление больших пальцев рук и регулируемого механизмом сцепления храповых зубьев подвижного захвата 3 и зубьями поворотной защелки 5, связанной через опорную пружину 6 с фиксатором 7, а последующее перемещение фиксатора 7 внутрь до упора толкателем 8 в направляющей 9 обеспечивает фиксацию наручника-колодки в положении "закрыто" (фиг. 4). При движении подвижного захвата 3 внутрь корпуса в положение "закрыто" (фиг. 4) одновременно происходит сжатие (взведение) опертой на заклепку 10 пружины возврата 4 подвижного захвата 3 в исходное положение "открыто" (фиг.2, 3).
Открывание. В скважину 11, расположенную на верхней щеке 1, вводится ключ 12 и поворотом его против часовой стрелки фиксатор 7 освобождает поворотную защелку 5, выдвигая наружу толкатель 8, а затем поворотом ключа 12 по часовой стрелке отодвигают поворотную защелку 5, выводя из защемления подвижную защелку 5 с подвижным захватом 3, который под действием сжатой (взведенной) пружины возврата 4 отодвигает подвижный захват 3 в исходное положение "открыто" (фиг.2, 3).
Данная конструкция обладает простотой и высокой технологичностью в производстве, высокой надежностью и эффективностью в эксплуатации.
Использование данного технического решения не требует дополнительного переоборудования предприятий. Первое промышленное опробование планируется в 1 квартале 2002 года на ОАО "Мехинструмент" (г. Павлово, Нижегородская обл. ).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛОННЫЙ РЕВОЛЬВЕР | 1994 |
|
RU2086881C1 |
| НАРУЧНИКИ | 1990 |
|
RU2024720C1 |
| НАРУЧНИКИ | 1992 |
|
RU2005871C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДВИЖЕНИЯ И ФИЗИЧЕСКИХ ВОЗМОЖНОСТЕЙ КОНЕЧНОСТЕЙ ПРАВОНАРУШИТЕЛЯ | 1995 |
|
RU2091555C1 |
| НАРУЧНИКИ | 1993 |
|
RU2084608C1 |
| ЭКЗОСКЕЛЕТОН | 1995 |
|
RU2110244C1 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЕ НАРУЧНИКИ | 2016 |
|
RU2643964C2 |
| ГАЗОБАЛЛОННЫЙ ПИСТОЛЕТ | 1995 |
|
RU2084802C1 |
| СМЕННЫЙ РУЧНОЙ ИНСТРУМЕНТ | 1998 |
|
RU2149527C1 |
| ПАКЕР | 1992 |
|
RU2049223C1 |
Наручник-колодка может быть использован правоохранительными органами для ограничения свободы действия человека и позволяет упростить конструкцию, повысить технологичность изготовления и надежность и расширить эксплуатационные возможности. Наручник-колодка размещается на больших пальцах и содержит корпус из скрепленных между собой щек, подвижный захват с храповыми зубьями, поворотную защелку с фиксатором, опорную пружину и ключ. Щеки выполнены Г-образной формы и образуют полый прямоугольный корпус, внутри которого размещен подвижный захват с пружиной возврата его в исходное открытое положение. В плоскостях щек корпуса и подвижного захвата выполнены два сквозных совмещенных отверстия несимметричной эллипсоподобной формы с характерными размерами больших пальцев рук с возможностью уменьшения площади сечения просветов отверстий одновременно в продольном и поперечном направлениях для замещения больших пальцев рук при всречном движении корпуса и подвижного захвата в процессе закрывания. 4 ил.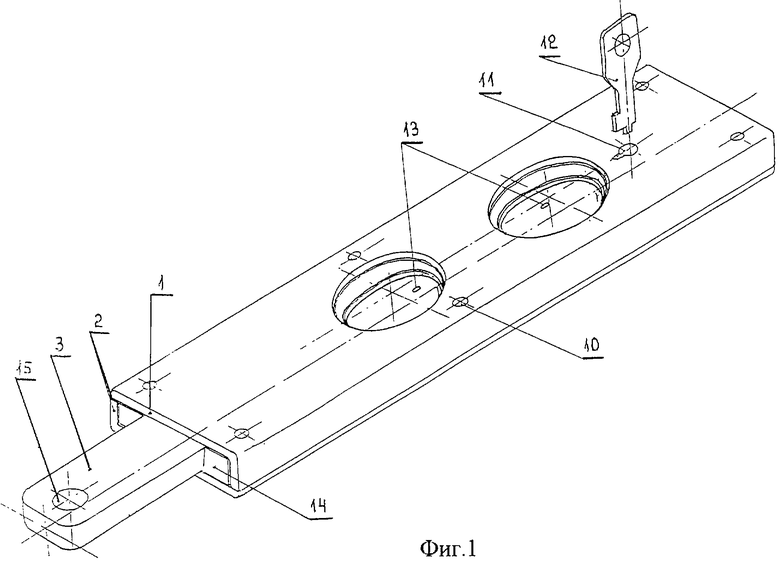
Наручник-колодка для размещения на больших пальцах рук, содержащий корпус из скрепленных между собой щек, подвижный захват с храповыми зубьями, поворотную защелку, опорную пружину и ключ, отличающийся тем, что он содержит фиксатор поворотной защелки, а щеки выполнены Г-образной формы и образуют полый прямоугольный корпус, внутри которого размещен подвижный захват с пружиной возврата его в исходное открытое положение, при этом в плоскостях щек корпуса и подвижного захвата выполнены два сквозных совмещенных отверстия несимметричной эллипсоподобной формы с характерными размерами больших пальцев рук с возможностью уменьшения площади сечения просветов отверстий одновременно в продольном и поперечном направлениях для замещения больших пальцев рук при встречном движении корпуса и подвижного захвата в процессе закрывания.
| US 3146614 A, 01.09.1964 | |||
| РОЛИКОВАЯ ОБГОННАЯ МУФТА | 0 |
|
SU209155A1 |
| US 3545237 A, 08.12.1970 | |||
| US 5461890 A, 31.10.1995 | |||
| US 4351169 A, 28.09.1982. | |||

