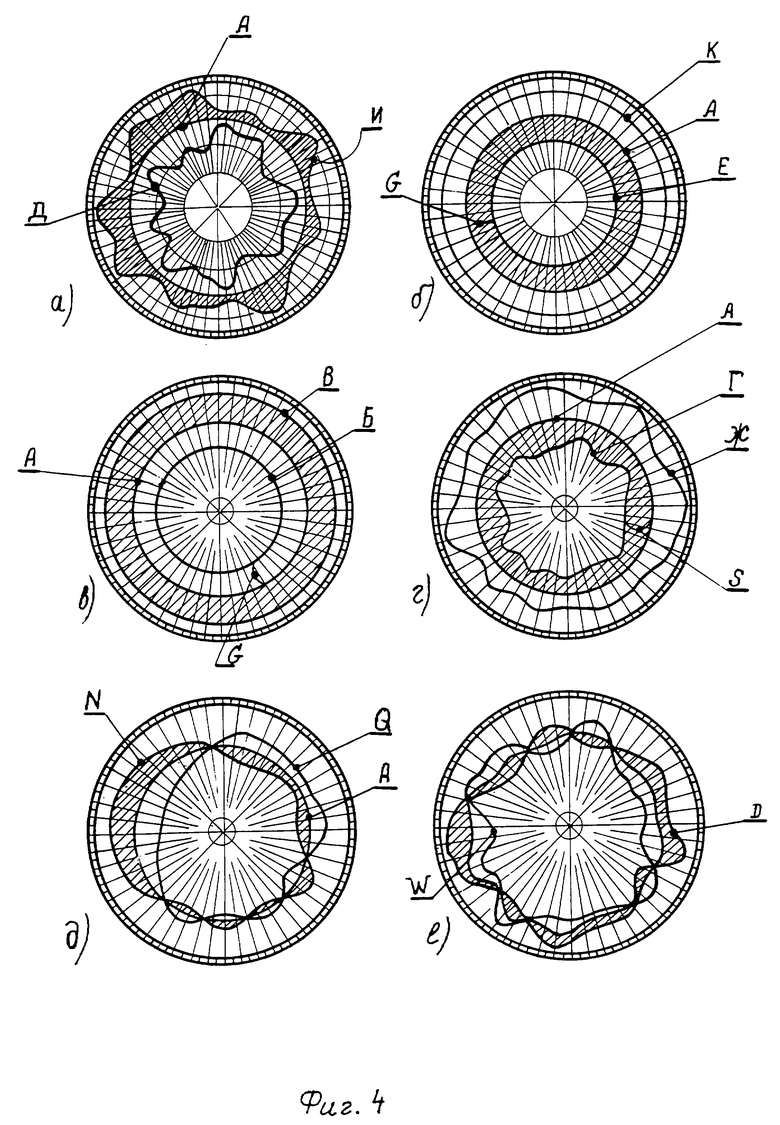
Устройство относится к измерительной технике и предназначено для исследования режимов работы двигательных механизмов и кинематических схем. Устройство содержит два диамагнитных диска-манжеты, каждый с кольцом из пленочного магнитного носителя, устанавливаемых на различных сечениях исследуемого объекта, электронно-лучевой осциллографический индикатор, а также переключатель режимов подсветки. Против каждого кольца из пленочного магнитного носителя неподвижно установлена универсальная магнитная головка. Дополнительная пара магнитных головок установлена против обоих колец с возможностью синфазного кругового смещения. В качестве первичных преобразователей углового положения исследуемого объекта применена пара синус-косинусных датчиков, закрепленных у границ динамически деформируемой области вращающегося объекта. В устройство введены переключатели яркостной модуляции, яркостной аттенюации циклограмм и инверсии циклограмм. Техническим результатом изобретения является возможность инвертирования полярности воспроизводимых циклограмм с одновременным отображением основных и инвертированных полярных диаграмм, оперативная яркостная аттенюация отдельных циклограмм и формируемых криволинейных кольцевых фигур. 2 з.п.ф-лы, 4 ил.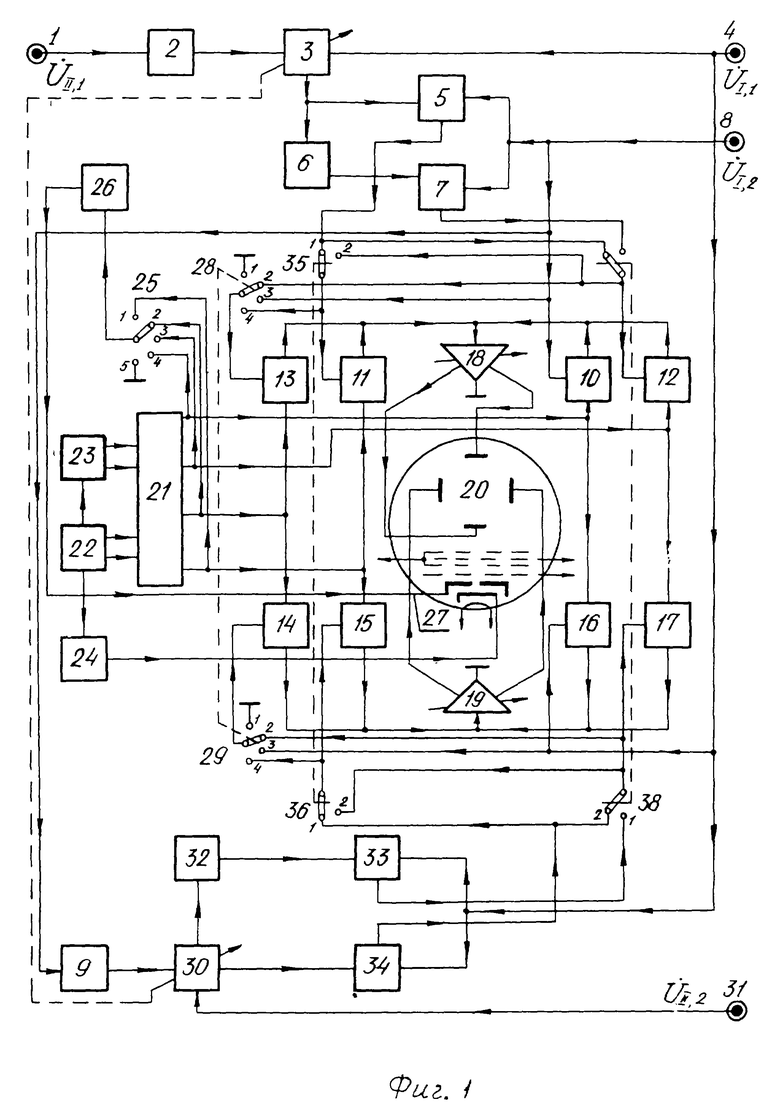
1. Устройство для визуального контроля динамических крутильных деформаций вращающихся объектов, содержащее пару насадных диамагнитных дисков-манжетов, устанавливаемых на различных сечениях исследуемого вала, два кольца из магнитного пленочного носителя, посаженных на цилиндрические поверхности диамагнитных дисков-манжетов, пару универсальных магнитных головок, неподвижно установленных против кольцевых магнитных носителей, электронно-лучевой индикатор с двумя симметрирующими усилителями, выходы которых соединены с ортогональными парами отклоняющих пластин этого индикатора, снабженного накладной прозрачной кругорадиальной шкалой, синус-косинусный потенциометрический угловой преобразователь и переключатель режима яркостной разметки, отличающееся тем, что в него введены четыре фазоинвертирующих каскада, два алгебраических сумматора, четыре узла сложения сигналов, две четырехкаскадные группы управляемых ключевых узлов, четырехпозиционная схема совпадений, мультивибраторный узел и триггерный узел, узел формирования гасящих импульсов, пятипозиционный переключатель яркостной модуляции с узлом формирования сигналов подсветки, двухсекционный четырехпозиционный переключатель яркостной аттенюации циклограмм и два переключателя инверсии циклограмм, а в качестве первичных преобразователей углового положения исследуемого объекта применена пара синус-косинусных датчиков, закрепленных у двух сечений исследуемого объекта, ограничивающих его динамически деформируемую область, первый выход первого синус-косинусного датчика соединен с одним из пары входов первого алгебраического сумматора, другой вход которого через первый фазоинвертирующий каскад связан с первым выходом второго синус-косинусного датчика, выход первого алгебраического сумматора связан с одним из пары входов первого узла сложения сигналов непосредственно, а с одним из пары входов второго узла сложения сигналов - через второй фазоинвертирующий каскад, при этом первый и второй узлы сложения сигналов своими вторыми входами параллельно соединены со вторым выходом первого синус-косинусного датчика, а также со входом третьего фазоинвертирующего каскада и со вторым входом третьего управляемого ключевого узла первой четырехкаскадной группы управляемых ключевых узлов, первые - манипуляционные - входы управляемых ключевых узлов первой и второй четырехкаскадных групп попарно - по одному узлу от каждой группы - подключены к выходам четырехпозиционной схемы совпадений, входы которой соединены с симметричными выходами мультивибраторного узла и с симметричными выходами триггерного делительного узла, связанного своим бинарным входом с одним из выходов мультивибраторного узла, вторые входы первых управляемых ключевых узлов первой и второй четырехкаскадных групп управляемых ключевых узлов подключены к подвижным (коммутирующим) контактам первой и второй секций двухсекционного четырехпозиционного переключателя яркостной аттенюации соответственно, первые неподвижные элементы секций двухсекционного четырехпозиционного переключателя яркостной аттенюации ″заземлены″, вторые, третьи и четвертые неподвижные элементы первой и второй секций двухсекционного четырехпозиционного переключателя яркостной аттенюации соединены со вторыми входами соответственно вторых, третьих и четвертых управляемых ключевых узлов соответственно первой и второй четырехкаскадных групп управляемых ключевых узлов, подвижные коммутирующие контакты первых секций и первого и второго переключателей инверсии циклограмм связаны соответственно со вторыми входами четвертого и второго управляемых ключевых узлов первой четырехкаскадной группы управляемых ключевых узлов, а четвертый и второй управляемые ключевые узлы второй четырехкаскадной группы управляемых ключевых узлов своими вторыми входами приключены к подвижным коммутирующим контактам соответственно вторых секций и первого и второго двухсекционных переключателей инверсии циклограмм, первые неподвижные контакты обеих секций первого переключателя инверсии циклограмм соответственно соединены со вторыми неподвижными контактами обеих секций второго переключателя инверсии циклограмм, подвижные контакты второго переключателя инверсии циклограмм соответственно соединены со вторыми неподвижными контактами обеих секций первого переключателя инверсии циклограмм, выход третьего фазоинвертирующего каскада соединен с первым входом второго алгебраического сумматора, второй вход которого связан со вторым выходом второго синус-косинусного датчика, а один из пары выходов второго алгебраического сумматора через четвертый фазоинвертирующий каскад подключен к первому входу третьего узла сложения, другой же из пары выходов второго алгебраического сумматора связан с первым входом четвертого узла сложения непосредственно, вторые входы третьего и четвертого узлов сложения параллельно соединены с первым выходом первого синус-косинусного датчика, выходы первого и четвертого узлов сложения подключены к первым неподвижным контактам первой и второй секций первого двухсекционного переключателя инверсии циклограмм соответственно, в то время как выходы второго и третьего узлов сложения соединены соответственно с первыми неподвижными контактами первой и второй секций второго двухсекционного переключателя инверсии циклограмм, первый выход первого синус-косинусного датчика соединен также со вторым входом третьего управляемого ключевого узла второй четырехкаскадной группы управляемых ключевых узлов, при этом выходные цепи всех управляемых ключевых узлов первой четырехкаскадной группы управляемых ключевых узлов запараллелены и связаны через один из пары симметрирующих усилителей с первой парой пластин ортогональной системы отклонения электронно-лучевого осциллографического индикатора, а выходные цепи всех управляемых ключевых узлов второй четырехкаскадной группы управляемых ключевых узлов, будучи также запараллеленными между собой, соединены через другой из пары симметрирующих усилителей со второй парой пластин ортогональной системы отклонения электронно-лучевого осциллографического индикатора.2. Устройство по п.1, отличающееся тем, что в качестве первичных преобразователей углового положения вращающегося объекта оно предусматривает видоизмененное электромагнитное исполнение двух синус-косинусных датчиков, при котором в систему, содержащую пару основных универсальных магнитных головок, неподвижно установленных против двух разнесенных колец из магнитного пленочного носителя, введена также дополнительная пара универсальных магнитных головок, установленных, как и две основные магнитные головки, против колец обоих пленочных магнитных носителей, но с возможностью плавного и синфазного кругового смещения обеих дополнительных универсальных магнитных головок относительно неподвижной основной пары головок.3. Устройство по пп.1 и 2, отличающееся тем, что пятипозиционный переключатель яркостной модуляции и узел формирования сигнала подсветки включены последовательно, причем переключатель яркостной модуляции своими раздельными коммутируемыми входами связан с выходами четырехпозиционной схемы совпадений, а своим выходом соединен через узел формирования сигнала подсветки с первым управляющим электродом электронно-лучевого осциллографического индикатора, катод которого через узел формирования гасящих импульсов связан с выходом мультивибраторного узла.