25 28 16 26 П 3 гч

Изобретение относится к измерительной технике и может быть использовано для контроля деформации у сложно нагруженных объектов. Цель изобретения - повышение достоверности контроля за счет повышения разрешающей способности и возможности параллельного воспроизведения деформаций на разных направлениях контроля. При ненагруженном контролируемом объекте 29 на магнитные носители, закрепленные на поверхностях контролируемого и эталонного изделий, наносятся магнитные метки, синхронно связанные между собой. В процессе нагружения контролируемого объекта производится их считывание и отображение в виде яркостного пятна на экране электронно-лучевого индикатора. При этом за счет использования двух дорожек магнитных меток на эталонном объекте осуществляется соответствующая синхронизация отображения сигнала, а изменение потенциала с помощью генератора ступенчатого напряжения - смещение эпюр сигналов для разных участков одновременного контроля. 2 с. 2 з.п. ф-лы, 3 ил.
V
щ
.v
f3
xiE
f77rfrf
.
П гз 2/10 19 18
Риг.1
-Zc
.w
О)
щ
.v
-гз
.10
7
СП
О)
ций на разных направлениях контроля. При ненагруженном контролируемом объекте 29 на магнитные носители, закрепленные на поверхностях контроли- руемого;;и эталонного изделий, наносятся магнитные метки, синхронно связанные между собой. В процессе нагру- жения контролируемого объекта производится их считыва}сие и отображение в виде яркостного пятна на экране
Изобретение отнвсится к области измерительной техники и может быть использовано для контроля деформации у сложно нагруженных объектов.
Целью изобретения является повыше- кие достоверности контроля за счет повышения разрешающей способности и возможности параллельного воспроизведения деформаций на разных направлениях.
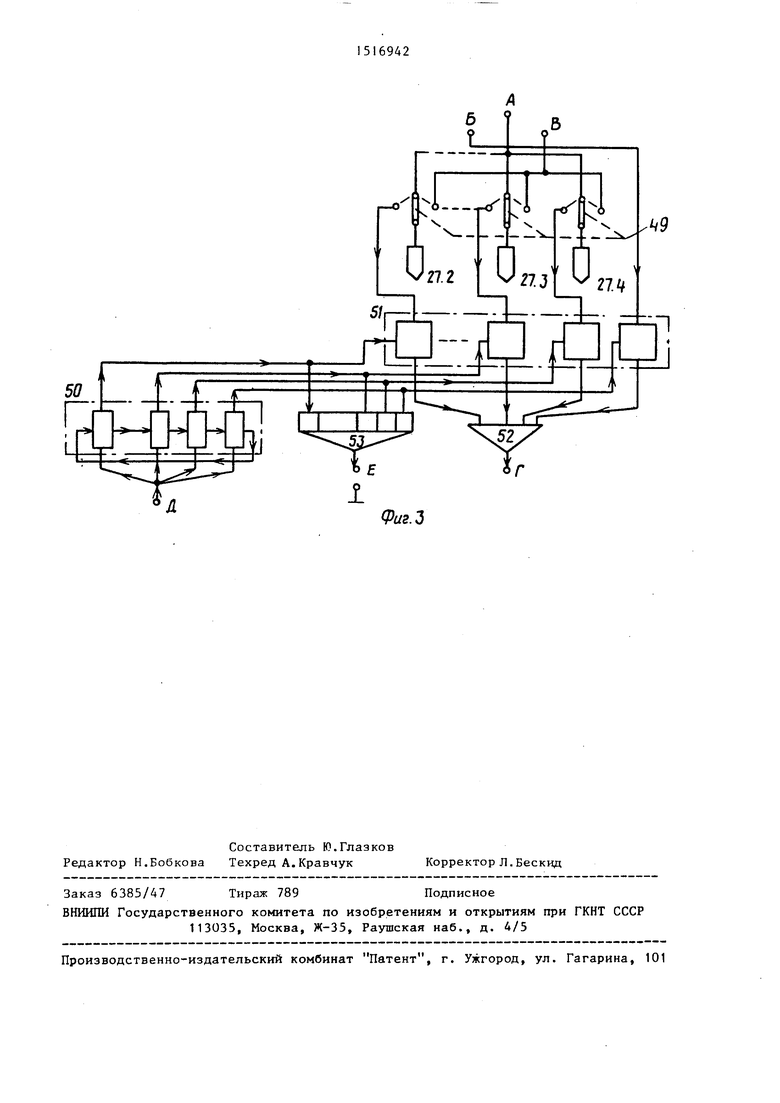
На фиг.1 представлена конструкция уртройства для реализации предлагаемого способа; на фиг.2 - структурная схема электронного блока для обработки сигналов; на фиг.З - расширение электронного блока при многоканальном контроле.
Устройство содержит возвратно-поступательный привод 1, в состав которого входит электродвигатель 2, ре- дуктор 3, связанный с электродвигателем, торцовьЕ кулачок 4 с контактором 5, предназначенным для периодического касания контактной планки 6.
Возвратно-поступательный привод 1 содержит подпружиненный толкатель 7 со штоком 8, предназначенным для взаимодействия с торцовым кулачком 4. Пружина 9 подпружинивает толкатель 7, а направляющие 10 и П фиксируют зону перемещения подпружиненного толкателя 7. Кроме того, возвратно-поступательный привод содержит кронштейн 12.
Устройство содержит N гибких штоков 13 с оболочкой 14, закрепленной в кронштейне 12.
Устройство содержит также узел 15 сканирования магнитного носителя эталонного объекта и N узлов 16 сканирования контролируемого объекта, свя занных через гибкие штоки 13 с подпружиненным толкателем 7. Узел 15 сканирования магнитного носителя эталонного объекта содержит опору 17,
электронно-лучевого индикатора. При этом за счет использования двух дорожек магнитных меток на эталонном объекте осуществляется соответствующая синхронизация отображения сигнала, а изменение потенциала с помощью генератора ступенчатого напряжения - смещение эпюр сигналов для разных участков одновременного контроля. 2 с. и 2 3.п. ф-лы, 3 ил.
в которой закреплена оболочка 14 гнб- кого штока 13, направляющие 18, закрепленные в опоре 17, подвижную каретку 19, перемещаемую по направляющим 18 с помощью гибкого штока 13, и две магнитные головки 20 и 21, закрепленные на подв1таной каретке 19 таким образом, что магнитная головка 21 может перемещаться вдоль движения подвижной каретки 19.
Узел 16 сканирования магнитного носителя эталонного объекта содержит недеформируемую диамагнитную пластину 22, закрепленную на эталонном объекте 23 с магнитным носителем 24.
N узлов 16 сканирования магнитного носителя контролируемого объекта выполнены идентично и содержат опору 24, в которой закреплена оболочка 14 гибкого штока 13, направляющие 25 с подвижной кареткой 26 и магнитную головку 27, закрепленную на подвижной каретке 26. На фиг.1 приведен также магнитньи носитель 28, предназначенный для закрепления на контролируемом изделии 29.
Электронньй блок контроля устройства (фиг.2 содержит соединенные последовательно стабилизированный генератор 30 гармонических сигналов, усилитель-ограничитель 31, управляе- мый ключевой каскад 32, дифференци- рующай усилитель 33, диодную селективну ветвь 34, импульсный усилитель 35 и усилитель-ограничитель 36, соединенные по (ледовательно вторую диодную селективную ветвь 37, подключенную к выходу дифференцирующего усилителя 33, усилитель- инвертор 38 и усилитель-ограничитель 39, и формирователь 40 временных ворот, выход которого соединен с входом управления управляемого ключевого каскада 32. Кроме того, блок содержит
515
трехканальны трехпознцноииый переключатель 41, к выходным контактам которого подключены соответственно магнитные головки 20, 27 и 21, к контактам BTOpoii позиции первого и объединенных второго и третьего каналов подключены выходы усилителей-ограни- чнтепеи 36 и 39, генератор 42 стирания, подключенный к контактам третьей позиции трехканального трехпозицион- ного переключателя 41, соединенные последовательно импульсный усилитель 43, подключенный к контакту первой позиции первого канала трехканального трехпозиционного переключателя 41, генератор 44 ждущей вертикальной, развертки, генератор 45 горизонтально временной развертки и электронно-лучевой индикатор 46.
Электронный блок содерисит соединенные последовательно схему ИЛИ 47, подключенную к контактам первой позиции второго и третьего каналов трехканального трехпозиционного переключателя 41, и фop пIpoвaтeль 48 импульсов подсвета, выход которого подключен к модулятору электро1пю-луче- вого индикатора 46.
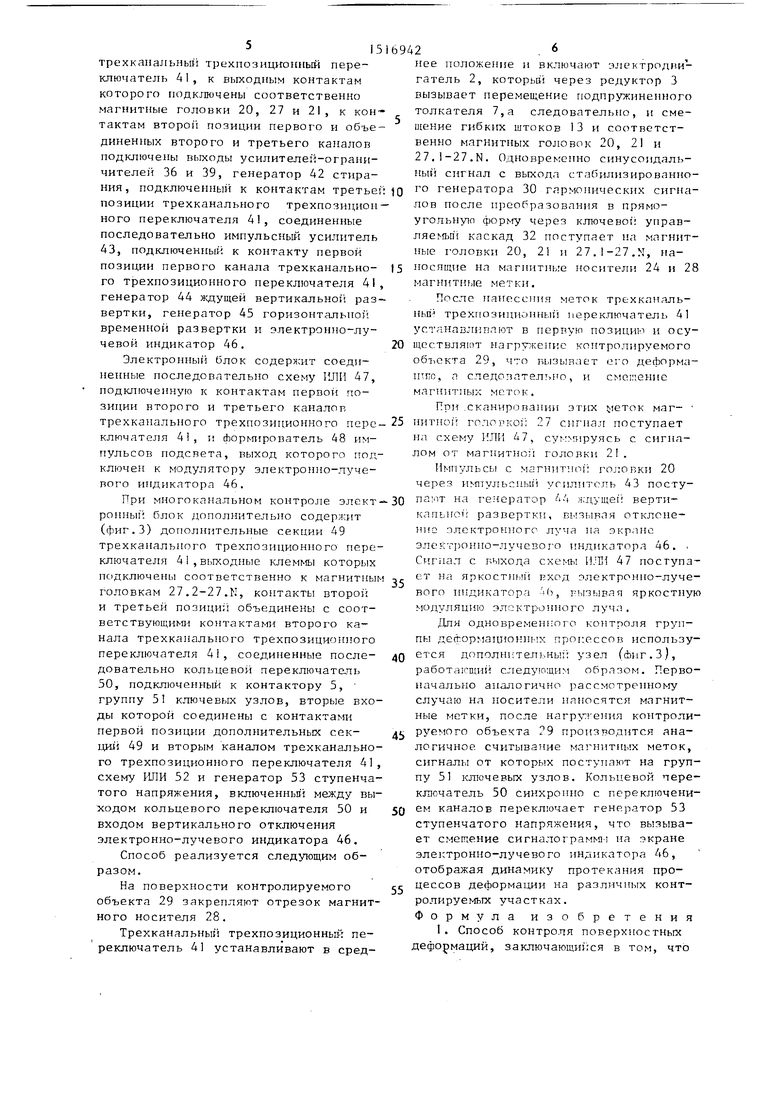
При многоканальном контроле элект ропньи : блок дополнительно содержит (фиг.З) дополнительные секции 49 трехканального трехпозиционного переключателя 41,выходные клеммы которых подключены соответственно к магнитным головкам 27.2-27.N, контакты второй и третьей позиций объединены с соответствующими контактами второго канала трехканального трехпозициоиного переключателя 41, соединенные последовательно кольцевой переключатель 50, пoдключe ный к контактору 5, группу 51 ключевых узлов, вторые входы которой соединены с контактами первой позиции дополнительных сек- ци11 49 и вторым каналом трехканального трехпозиционного переключателя 41 схему ИЛИ 52 и генератор 53 ступенчатого напряжения, включенный между выходом кольцевого переключателя 50 и входом вертикального отключения электронно-лучевого индикатора 46.
Способ реализуется следующим образом.
На поверхности контролируемого объекта 29 закрепляют отрезок магнитного носителя 28.
Трехканальны трехпозиционный переключатель 41 устанавливают в сред942, 6
нее положение и включают электродвигатель 2, которьц через редуктор 3 вызывает перемещение подпружиненного толкателя 7,а следовательно, и смещение гибких щтоков 13 и соответственно магнитных головок 20, 21 и 27.1-27.N. Одновременно синусоидаль- (1ый сигнал с выхода стабилизированно- Q го генератора 30 гармонических сигналов после преобразования в прямоугольную форму через ключевой управ- ляемьп каскад 32 поступает на магнитные головки 20, 21 и 27.1-27.М, на- 5 носящие на магнитные носители 24 и 28 магнитные метки.
После паиессния меток трехканаль- ньп трехпозиционный переключатель 41 усглнавлнплют в первую позицию и осу- 0 ществляшт нагружепис контролируемого об-ьскта 29, что вызывает его деформа- пи о, п следовательно, и смещение магпитпых меток.
При .сканировании этих шток маг- 5 нитно гологчсоГ: 27 сигнал поступает пп схему ИЛИ 47, суг. ируясь с сигналом от MariiHTHoii головки 21 .
Импульсы с MariniTMoi: головки 20 через И -тульс 1ый усилитель 43 посту- 0 пают на генератор 44 м;цуще1 верти- капьпой развертки, вь зывяя отклонение олектронного луча па экрана электронпо-лучевог о индикаторл 46. . Сигнал с выхода схемы И. Б 47 поступает на яркост) вход электронно-лучевого индикатора ДЬ, рызывая яркостную МОДУЛЯЦИЮ электронного лучл.
Для одновременного контроля группы деформащюнпых процессов использу- Q ется дополн ;тел., узел (йиг.З),
работающи следующим образом. Первоначально аналогично paccMOTpennoNry случаю на носители ппносятся магнитные метки, после нагру:ге1П1я контроли- t руемого объекта 29 производится аналогичное считывание магнитных меток, сигналы от которых поступают на группу 51 ключевых узлов. Кольцевой переключатель 50 синхронно с переключени- 0 ем каналов переключает генератор 53 ступенчатого напряжения, что вызывает смещение си гнало грамм- на экране эле ;тронно-лучевого индикатора 46, отображая динамику протекания про5
55
цессов деформации на различпых контролируемых участках. Формула изобретения
I. Способ контроля поверхностных деформаций, заключающийся в том, что
к поверхностям недеформируемого эталонного объекта и исследуемого объекта в направлении его ожидаемых деформаций крепят магнитные носители, на которые наносят равноинтервальные магнитные метки, нагрулсают исследуе- Mbrii объект,считывают метки параллельным сканированием носителей и о деформации исследуемого объекта су- дят по взаимному смещению считываемых меток, отличающийся тем, что, с целью повышения достоверности контроля, запись меток на магнитном носителе эталонного объекта производят параллельно на двух дорожках, синфазно с метками на носителе пенагруя .е-пного контролируеьп о объекта на первой дорожке и со смещением по фазе от нуля до полупериода повто- рения па второй дорожке, а при сканировании носителе импульсные сигналы с второй дорожки преобразуют в пилообразный сигнал вертикального отклонения воспроизводящего элемента двухкоординатного графического ипди- кзтора, а импульсные сигналы, получаемые от считывания первой дорох ки и с магнитного носителя исследуемого объекта, используют для яркостпой мо- ДУЛЯЦ1П1 воспроизводящего элемента.
2, Устройство для контроля поверхностных деформацш , содержащее узел сканирования магнитного носителя эталонного объекта, состоящиг: опоры для установки на сканируемой поверхности и направляющих с подвижной вдоль них кареткой и магпитноГ головкой, электроРИ1ый блок контроля и возвратно-поступательный привод, о т- л и ч а ю D; е е с я тем, что, с целью повышения достоверности контроля оно снабжено дополнительными узлами сканирования магнитных носителей контролируемого объекта,/число кото- рых равно числу контролируемых направлений, выполненных аналогично узлу сканирования магнитного носитепя эталонного объекта, и N гибкими штоками, возвратно-поступательны привод выполнен в виде подпруя иненного толкателя с лине1шыми направляющими и контактора, узел сканирования эталонного объекта выполнен с второй магнитной головкой, установленной на подвижной каретке параллельно первой головке и с возможностью продольного смещения относительно нее, а гибкие штоки присоединены одними концами к
5 0 5 Q
Q
5
подвижным кареткам узлов сканирования носителей контролируемого и эталонного объектов, а их другие концы соединены с подпружиненным толкателем возвратно-поступательного привода.
рого канала трехканального трехпози- ционного переключателя, соединенными последовательно кольцевым переключателем, подключенным к контактору, группой ключевых узлов, вторые входы которых соединены с контактами первой позиции основной и дополнительных секций трехкапального трехпози- ционного переключателя, второй схемот Или, выход которой подключен к первому входу первой схемы ИЛИ, и генера- тором ступенчатого напряжения, включенным между выходом кольцевого переключателя и входом вертикального отклонения электрон}го-лучевого индикатора.
32
Фиг. г
50
Фиг.:5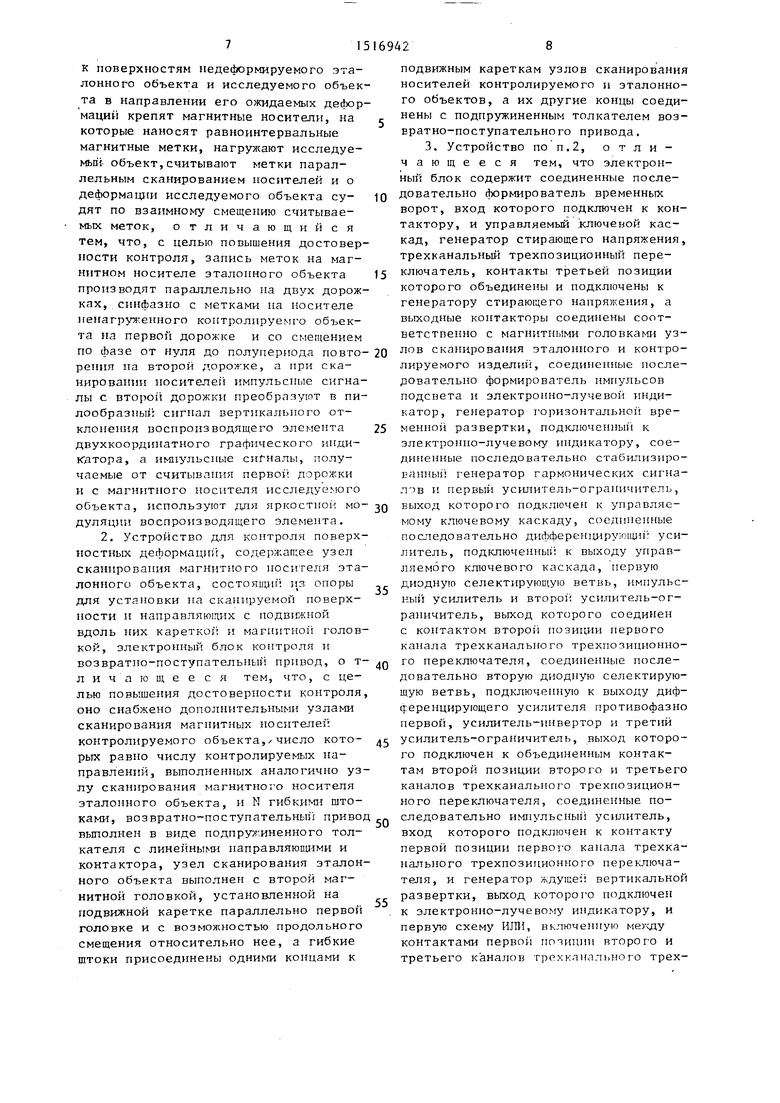
| Устройство для неразрушающего контроля цилиндрических полостей | 1977 |
|
SU643794A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1251674, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
