Изобретение относится к средствам неразрушающего прочностного контроля элементов механических конструкций и может быть использовано для исследования процессов зарождения и развития дефектов по- верхности на различных стадиях разрушения сложнонагружаемых электропроводящих объектов.
Цель изобретения - повышение инфор- .мативности за счет визуализации при прочностных испытаниях картины двухмерного распределения и динамики развития процессов поверхностного разрушения контролируемых объектов.
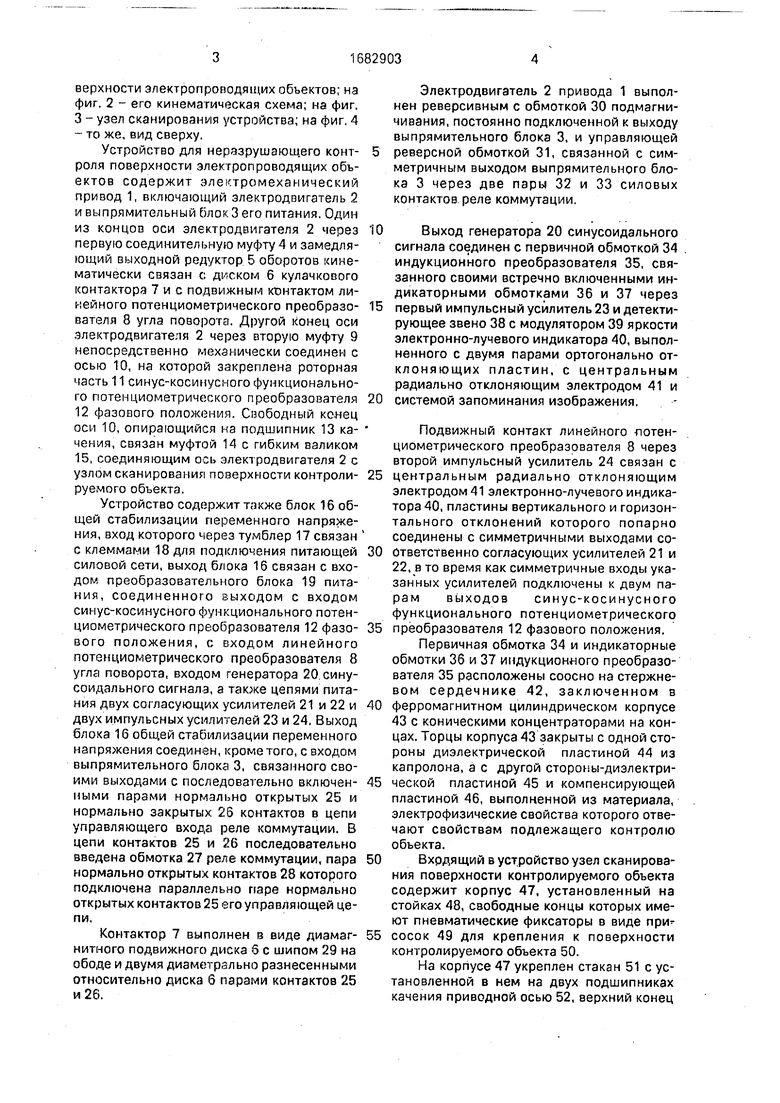
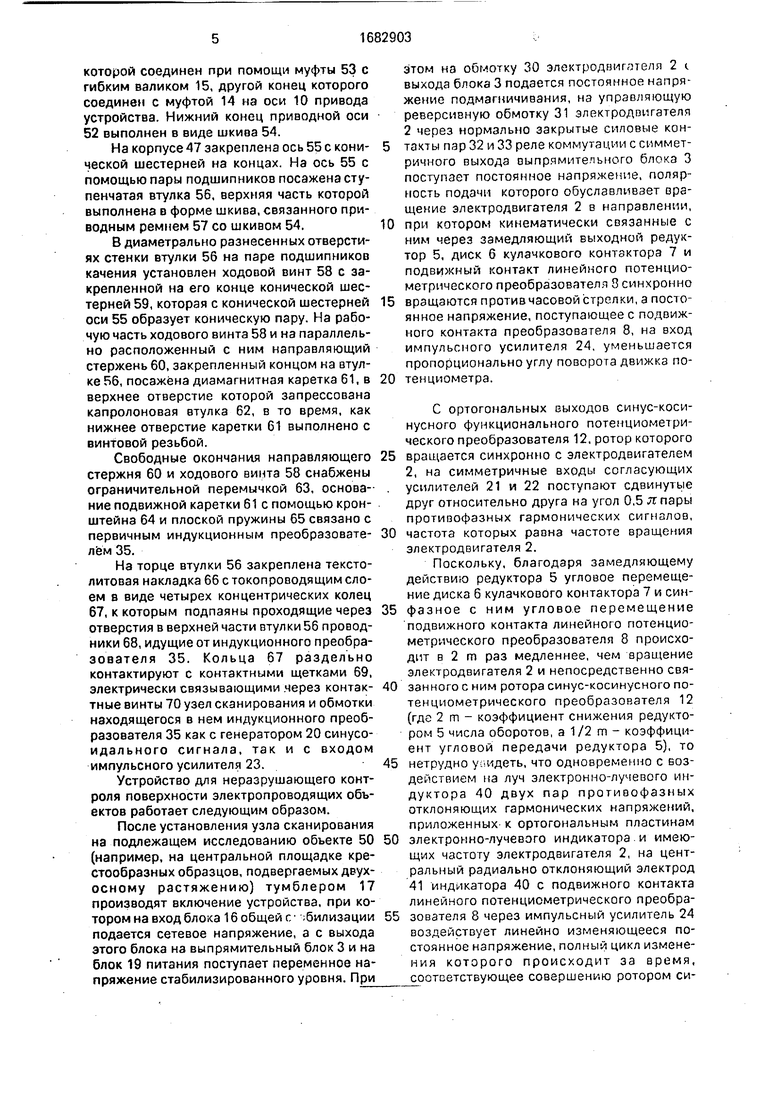
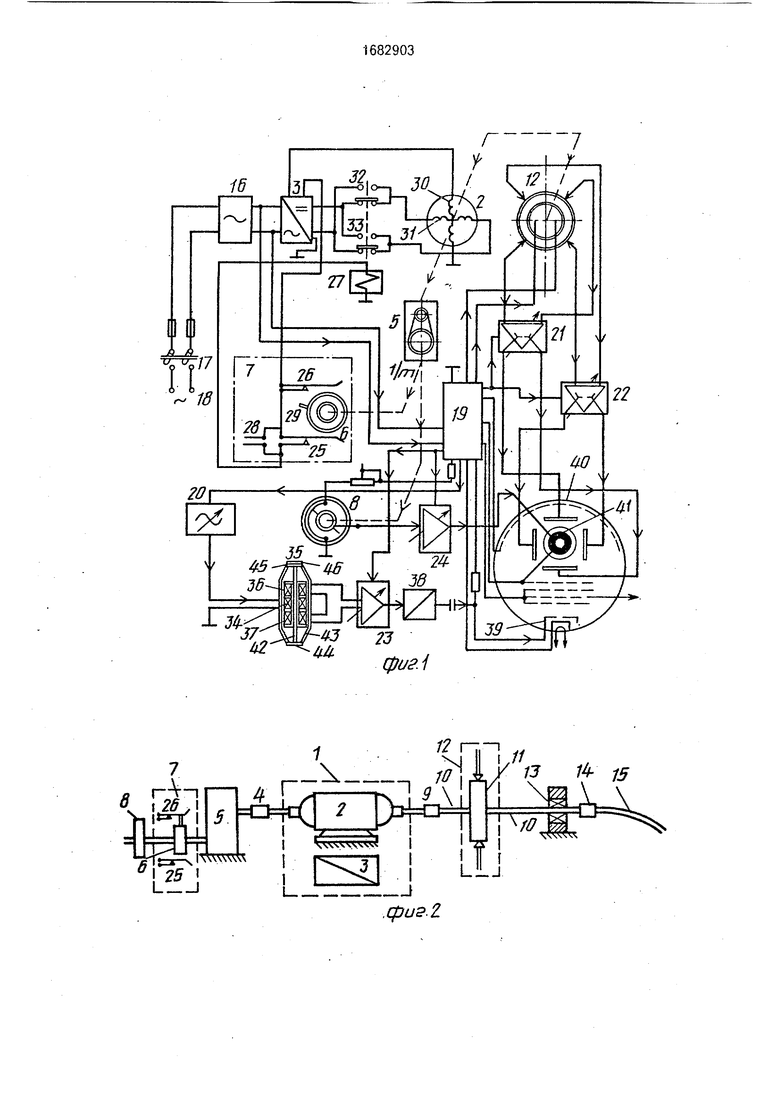
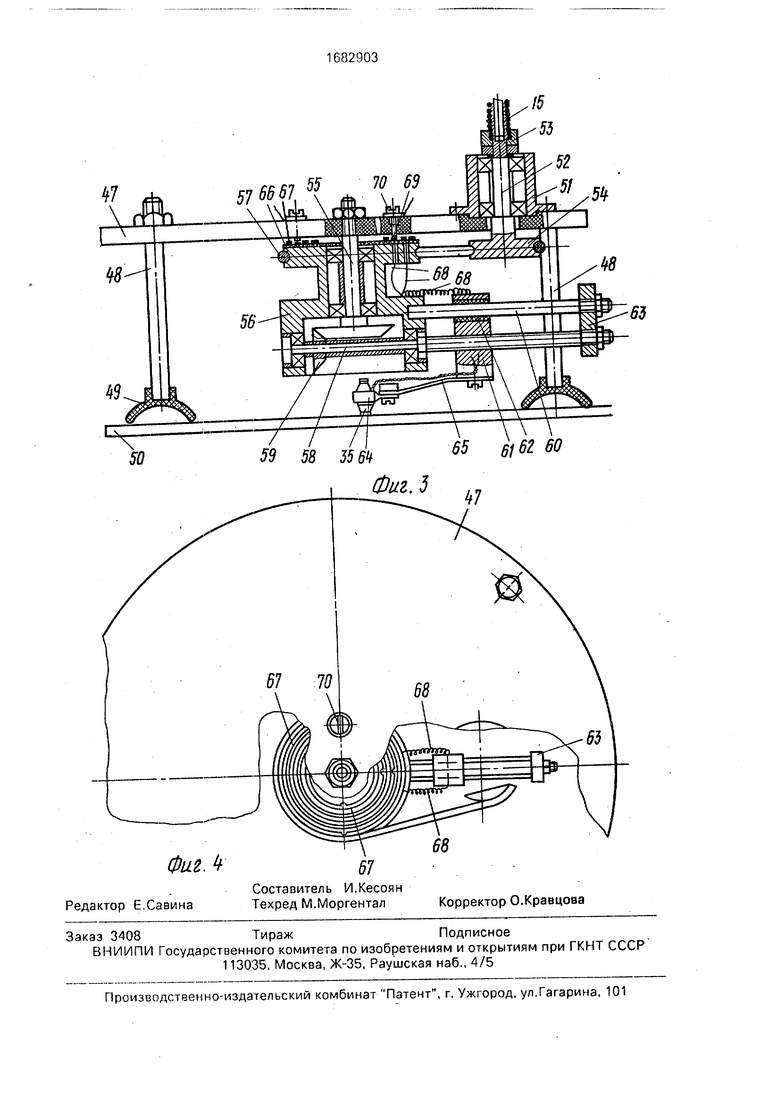
На фиг. 1 представлена блок-схема устройства для неразрушающего контроля поверхности электропроводящих объектов; на фиг, 2 - его кинематическая схема; на фиг. 3 - узел сканирования устройства; на фиг. 4 - то же, вид сверху.
Устройство для неразрушающего контроля поверхности электропроводящих объектов содержит электромеханический привод 1, включающий электродвигатель 2 и выпрямительный блок 3 его питания. Один из концов оси электродвигателя 2 через первую соединительную муфту 4 и замедляющий выходной редуктор 5 оборотов кинематически связан с диском 6 кулачкового контактора 7 и с подвижным контактом линейного потенциометрического преобразователя 8 угла поворота. Другой конец оси электродвигателя 2 через вторую муфту 9 непосредственно механически соединен с осью 10, на которой закреплена роторная часть 11 синус-косинусного функционального потенциометрического преобразователя 12 фазового положения. Свободный конец оси 10, опирающийся ка подшипник 13 качения, связан муфтой 14 с гибким валиком 15, соединяющим ось электродвигателя 2 с узлом сканирования поверхности контролируемого объекта.
Устройство содержит также блок 16 общей стабилизации переменного напряжения, вход которого через тумблер 17 связан с клеммами 18 для подключения питающей силовой сети, выход блока 16 связан с входом преобразовательного блока 19 питания, соединенного выходом с входом синус-косинусного функционального потенциометрического преобразователя 12 фазового положения, с входом линейного потенциометрического преобразователя 8 угла поворота, входом генератора 20 синусоидального сигнала, а также цепями питания двух согласующих усилителей 21 и 22 и двух импульсных усилителей 23 и 24. Выход блока 16 общей стабилизации переменного напряжения соединен, кроме того, с входом выпрямительного блока 3, связанного своими выходами с последовательно включенными парами нормально открытых 25 и нормально закрытых 26 контактов в цепи управляющего входа реле коммутации. В цепи контактов 25 и 26 последовательно введена обмотка 27 реле коммутации, пара нормально открытых контактов 28 которого подключена параллельно паре нормально открытых контактов 25 его управляющей цепи.
Контактор 7 выполнен в виде диамагнитного подвижного диска 8 с шипом 29 на ободе и двумя диаметрально разнесенными относительно диска 6 парами контактов 25 и 26.
Электродвигатель 2 привода 1 выполнен реверсивным с обмоткой 30 подмагни- чивания, постоянно подключенной к выходу выпрямительного блока 3, и управляющей реверсной обмоткой 31, связанной с симметричным выходом выпрямительного блока 3 через две пары 32 и 33 силовых контактов реле коммутации,
Выход генератора 20 синусоидального сигнала соединен с первичной обмоткой 34 индукционного преобразователя 35, связанного своими встречно включенными индикаторными обмотками 36 и 37 через
первый импульсный усилитель 23 и детектирующее звено 38 с модулятором 39 яркости электронно-лучевого индикатора 40, выполненного с двумя парами ортогонально отклоняющих пластин, с центральным радиально отклоняющим электродом 41 и
системой запоминания изображения.
Подвижный контакт линейного -потен- циометрического преобразователя 8 через второй импульсный усилитель 24 связан с
центральным радиально отклоняющим электродом 41 электронно-лучевого индикатора 40, пластины вертикального и горизонтального отклонений которого попарно соединены с симметричными выходами соответственно согласующих усилителей 21 и 22, в то время как симметричные входы указанных усилителей подключены к двум парам выходов синус-косинусного функционального потенциометрического
преобразователя 12 фазового положения.
Первичная обмотка 34 и индикаторные обмотки 36 и 37 индукционного преобразователя 35 расположены соосно на стержневом сердечнике 42, заключенном в
ферромагнитном цилиндрическом корпусе 43 с коническими концентраторами на концах. Торцы корпуса 43 закрыты с одной стороны диэлектрической пластиной 44 из капролона, а с другой стороны-диэлектрической пластиной 45 и компенсирующей пластиной 46, выполненной из материала, электрофизические свойства которого отвечают свойствам подлежащего контролю объекта.
Вхрдящий в устройство узел сканирования поверхности контролируемого объекта содержит корпус 47, установленный на стойках 48, свободные концы которых имеют пневматические фиксаторы в виде присосок 49 для крепления к поверхности контролируемого объекта 50.
На корпусе 47 укреплен стакан 51 с установленной в нем на двух подшипниках качения приводной осью 52, верхний конец
которой соединен при помощи муфты 53 с гибким валиком 15, другой конец которого соединен с муфтой 14 на оси 10 привода устройства. Нижний конец приводной оси 52 выполнен в виде шкива 54.
На корпусе 47 закреплена ось 55 с кони- ческой шестерней на концах. На ось 55 с помощью пары подшипников посажена ступенчатая втулка 56, верхняя часть которой выполнена в форме шкива, связанного приводным ремнем 57 со шкивом 54.
В диаметрально разнесенных отверстиях стенки втулки 56 на паре подшипников качения установлен ходовой винт 58 с закрепленной на его конце конической шестерней 59,которая с конической шестерней оси 55 образует коническую пару. На рабочую часть ходового винта 58 и на параллельно расположенный с ним направляющий стержень 60, закрепленный концом на втулке 56, посажена диамагнитная каретка 61, в верхнее отверстие которой запрессована капролоновая втулка 62, в то время, как нижнее отверстие каретки 61 выполнено с винтовой резьбой.
Свободные окончания направляющего стержня 60 и ходового винта 58 снабжены ограничительной перемычкой 63, основа- ние подвижной каретки 61 с помощью кронштейна 64 и плоской пружины 65 связано с первичным индукционным преобразовате- лём 35.
На торце втулки 56 закреплена текстолитовая накладка 66 с токопроводящим слоем в виде четырех концентрических колец 67, к которым подпаяны проходящие через отверстия в верхней части втулки 56 проводники 68, идущие от индукционного преобразователя 35. Кольца 67 раздельно контактируют с контактными щетками 69, электрически связывающими .через контак- тные винты 70 узел сканирования и обмотки находящегося в нем индукционного преобразователя 35 как с генератором 20 синусо- идального сигнала, так и с входом импульсного усилителя 23.
Устройство для неразрушающего контроля поверхности электропроводящих объектов работает следующим образом.
После установления узла сканирования на подлежащем исследованию объекте 50 (например, на центральной площадке крестообразных образцов, подвергаемых двухосному растяжению) тумблером 17 производят включение устройства, при котором на вход блока 16 общей г, -билизации подается сетевое напряжение, а с выхода этого блока на выпрямительный блок 3 и на блок 19 питания поступает переменное напряжение стабилизированного уровня. При
этом на обмотку 30 электродвигателя 2 t выхода блока 3 подается постоянное напряжение подмагничивания, на управляющую реверсивную обмотку 31 электродвигателе 2 через нормально закрытые силовые кон- тахты пар 32 и 33 реле коммутации с симметричного выхода выпрямительного блока 3 поступает постоянное напряжение, полярность подачи которого обуславливает вращение электродвигателя 2 в направлении, при котором кинематически связанные с ним через замедляющий выходной редуктор 5, диск 6 кулачкового контзкторз 7 и подвижный контакт линейного потенцио- мегрического преобразователя 3 синхронно вращаются противчасовой стрелки, а постоянное напряжение, поступающее с подвижного контакта преобразователя 8, на вход импульсного усилителя 24, уменьшается пропорционально углу поворота движка потенциометра.
С ортогональных выходов синус-косинусного функционального потенциометри- ческого преобразователя 12, ротор которого вращается синхронно с электродвигателем 2, на симметричные входы согласующих усилителей 21 и 22 поступают сдвинутые друг относительно друга на угол 0,5 л: пары противофазных гармонических сигналов, частота которых равна частоте вращения электродвигателя 2.
Поскольку, благодаря замедляющему действию редуктора 5 угловое перемещение диска 6 кулачкового контактора 7 и син- фазное с ним угловое перемещение подвижного контакта линейного потенцио- метрического преобразователя 8 происходит в 2 m раз медленнее, чем вращение электродвигателя 2 и непосредственно связанного с ним ротора синус-косинусного по- тенциометрического преобразователя 12 (где 2т- коэффициент снижения редуктором 5 числа оборотов, а 1/2 m - коэффициент угловой передачи редуктора 5), то нетрудно увидеть, что одновременно с воздействием на луч электронно-лучевого индуктора 40 двух пар противофазных отклоняющих гармонических напряжений, приложенных к ортогональным пластинам электронно-лучевого индикатора и имеющих частоту электродвигателя 2, на центральный радиально отклоняющий электрод 41 индикатора 40 с подвижного контакта линейного потенциометрического преобразователя 8 через импульсный усилитель 24 воздействует линейно изменяющееся постоянное напряжение, полный цикл изменения которого происходит за время, соотсетствующее совершению ротором синус-косинусного преобразователя 12 2 m оборотов.
В результате совместного воздействия на ортогонально отклоняющие пластины электронно-лучевого индикатора 40 двух пар противофазных гармонических сигналов с симметричных выходов согласующих усилителей 21 и 22 Е сочетании с одновременным воздействием на центральный ра- диально отклоняющий электрод 41 линейно изменяющегося напряжения, поступающего с выхода импульсного усилителя 24, луч индикатора 40 перемещается по спирали Архимеда.
Одновременно с этим вращение элект- родвигателя 2 с помощью гибкого валика 15 передается на приводную ось 52 узла сканирования контролируемого объекта. Вращение шкива 54 передается приводным ремнем 57 ступенчатой втулке 56, благодаря чему последняя совместно с ходовым винтом 58 и направляющим стержнем 60, а также посаженной на них подвижной диамагнитной кареткой 61 вращается вокруг неподвижно закрепленной на корпусе 47 оси 55.
Ввиду того, что укрепленная на ходовом винте 58 шестерня 59 и коническая шестерня оси 55 образуют коническую пару, то одновременно с круговым вращением по- движной диамагнитной каретки 61 вокруг неподвижной оси 55 будет происходить также и радиальное перемещение каретки 61 вдоль направляющего стержня 60 благодаря обкатыванию шестерней 59 шестерни оси 55, а также благодаря резьбовой посадке подвижной каретки 61 на ходовом винте 58.
Результирующее перемещение диамагнитной каретки 61 и связанного с ней при помощи кронштейна 64 и плоской пружины 65 индукционного преобразователя 35 будет происходить при этом по спиральной траектории.
Если ходовой винт 58 выполнен с шагом, при котором полное перемещение диамагнитной каретки 61 в радиальном направлении от основания направляющего стержня 60 до ограничительной перемычки 63 происходит за m оборотов приводной оси 52 узла сканирования (и соответственно за m оборотов электродвигателя 2 общего привода), то при установке определенных значений коэффициентов передачи по напряжению усилителей 21,22 и 24 положение луча индикатора 40 в процессе спирального перемещения светящегося пятна по экрану индикатора 40 будет в любой момент времени строго соответствовать мгновенному положению индукционного преобразователя 35 на сканируемой поверхности исследуемого объекта 50.
В процессе спирального перемещения индукционного преобразователя 35 по поверхности сканируемого объекта ЭДС, наводимые током первичной обмотки 34 преобразователя 35 в его индикаторных обмотках 36 и 37, взаимно компенсируются при отсутствии дефекта на сканируемом участке поверхности обследуемого объекта 50, поскольку компенсирующая пластина 46 воспроизводит воздействие гладкой поверхности исследуемого объекта 50 сквозь кап- ролоновую пластину 44 у рабочего торца первичного преобразователя.
При прохождении преобразователя 35 над участками поверхности исследуемого объекта, пораженными различного вида дефектами и структурными несплошностями (трещинами, раковинами и т.п.), взаимная компенсация ЭДС, наводимых в обмотках 36 и 37 преобразователя, нарушается и поступающий с этих обмоток переменный рзз- ностный сигнал разбаланса после прохождения через импульсный усилитель 23 и детектирующее звено 38 подается на модулятор 39 яркости электронно-лучевого индикатора 40,
На экране индикатора 40 в местах воспроизводимой диаграммы, соответствующих по расположению дефектным участкам исследуемого объекта 50, при этом возникают элементы с повышенной яркостью свечения, конфигурация и геометрическая дислокация которых индицируют как положение, так и характер развития усталостных и других дефектов на поверхности контролируемых образцов, подвергаемых постоянным и знакопеременным нагружениям.
Вращение электродвигателя 2 и непосредственно соединенного с его валом ротора синус-косинусного потенциометри- ческого преобразователя 12 в исходном после включения устройства тумблером 17 направлении, при котором кинематически связанные с двигателем 2 через редуктор 5 диск 6 кулачкового контактора 7 и подвижной контакт линейного потенциометриче- ского преобразователя 8 вращаются против часовой, стрелки, будет продолжаться до тех пор, пока шип 29 диска 6 не замкнет нормально открытую пару контактов 25.
При этом обмотка 27 реле коммутации получит питание от выпрямительного блока- 3 через нормально замкнутую пару контактов 26 и через временно замкнувшиеся контакты 25 пары. Реле коммутации сработает и своими нормально открытыми контактами 28 заблокирует цепь своего питания. Одновременно с этим сработавшее реле коммутации перебросит подвижные элементы своих пар 32 и 33 силовых контактов в верхнее по схеме положение, изменив полярность подаваемого на управляющую реверсную обмотку 31 электродвигателя 2 напряжения.
Направление вращения электродвигателя 2 и непосредственно соединенного с его осью ротора синус-косинусного преоб- разователя 12 при этом изменяется, а связанные с электродвигателем 2 через редуктор 5 диск 6 кулачкового контактора 7 и подвижный контакт линейного потеицио- метрического преобразователя 8 начнут вращаться в обратном предшествующему направлении: по часовой стрелке.
В результате указанной реверсии электродвигателя 2 изменившийся порядок чередования фаз сигналов, поступающих с двух симметричных выходов преобразователя 12 на ортогонально отклоняющие пластины электронно-лучевого индикатора 40, а также изменение знака приращения постоянного напряжения, поступающего с вы- хода линейного потенциометрического преобразователя 8 через импульсный усилитель 24 на центральный радиально откло няющий электрод 41 электронно-лучевого индикатора 40, обусловят перемещение лу- ча этого индикатора в противоположном прежнему направлении: по разворачивающейся спирали, При этом отдельные элементы и участки указанной спирали, соответствующие местам дислокации обна- ружейных устройством дефектов на поверхности контролируемого объекта 50, будут на экране электронно-лучевого индикатора 40 светиться с повышенной яркостью благодаря поступлению на модулятор 39 индикато- ра 40 через усилитель 23 и детектирующее звено 38 импульсно изменяющейся разностной ЭДС с индикаторных обмоток 36 и 37 индукционного преобразователя 35, синфазное перемещение которого по поверх- ности исследуемого объекта 50 осуществляется сканирующим узлом также по разворачивающейся спирали: строго синхронно с перемещением луча индикатора 40.
Завершение той части цикла воспроизведения устройством индикаторной диаграммы, при которой луч электронного индикатора 40 и индкуционный преобразователь 35 синхронно перемещаются по раз- ворачивающейся спирали (восходящая часть траектории развертки), происходит в тот момент, когда шип 29 кулачкового контактора 7 в результате вращения диска 6 по часовой стрелке отожмет кверху удлиненную пружину нормально замкнутой пяры контактов 26 и разорвет цепь питания обмотки 27 реле коммутации, которое обесто- чится, разомкнув свои нормально открытые контакты 28 и возвратив перекидные контактные группы пар 32 и 33 в их исходное (показанное на чертеже) положение.
Поступающее при этом с симметричного выхода выпрямительного блока 3 на управляющую обмотку 31 электродвигателя 2 напряжение постоянного тока вновь изменяет свою полярность, в результате чего начинается та часть (половина) цикла воспроизведения индикаторной диаграммы, при которой луч электронно-лучевого индикатора 40 и ьждукционный преобразователь 35 синхронно перемещаются по сворачивающейся спирали.
Формируемые устройством на экране электронно-лучевого индикатора диаграммы, на которых в местах, отвечающих расло- ложению дефектных участков у исследуемого объекта,.возникают элементы с повышенной яркостью свечения, обеспечивают оперативную выдачу информации как о текущем прочностном состоянии испытуемых объектов, так и о тенденциях развития указанного состояния, поскольку воспроизводимые диаграммы характеризуют не только геометрическую конфигурацию возникающих дефектов, но и динамику их дислокации на поверхности исследуемых объектов.
Формула изобретения
1. Устройство для неразрушающего контроля поверхности электропроводящих объектов, содержащее электронно-лучевой индикатор, два импульсных усилителя, блок питания, генератор синусоидального сигнала, индукционный преобразователь, узел сканирования поверхности контролируемого объекта и связанный с ним гибким валиком электромеханический привод, состоящий из электродвигателя, подключенного к его входу выпрямительного блока, выходного редуктора и кулачкового контактора, отличающееся тем, что, с целью повышения информативности за счет визуализации при прочностных испытаниях кар- тины двухмерного распределения и динамики развития процессов поверхностного разрушения контролируемых объектов, оно снабжено синус-косинусным функциональным потенциометрическим преобразователем фазового положения, линейным потенциометрическим преобразователем угла поворота, доумя согласующими усилителями, симметричные выходы которых связаны соответственно с пластинами горизонтального и вертикальнего отклонений электронно-лучевого индикатора, детектирующим звеном, электромагнитным реле коммутации цепи питания электродвигателя, который выполнен реверсивным с двусторонне выходящей осью, силовые контакты реле коммутации включены между выпрямительным блоком и электродвигателем, кулачковый контактор взаимодействует с управляющим входом реле коммутации посредством последова- тельно включенных нормально открытых и нормально закрытых контактов, электронно-лучевой индикатор выполнен с центральным радиально отклоняющим электродом и системой запоминания изображения, один из концов оси электродвигателя через выходной редуктор соединен с кулачковым контактором и с подвижным контактом линейного потенциометрического преобразователя угла поворота, а другой конец оси электродвигателя непосредственно механически соединен с осью ротора синус-ко- сииусного преобразователя, ось ротора которого при помощи гибкого валика кинематически связана с приводной осью узла сканирования, блок питания связан с входами синус-косинусного преобразователя, линейногопотенциометрическогопреобразователя, генератора синусоидального сигнала, двух согласующих и двух импульсных усилителей и с входом выпрямительного блока, связанного своими выходами с последовательно соединенными нормально открытыми и нормально закрытыми контактами в цепи управляющего входа реле коммутации, пара нормально открытых контактов которого подключена параллельно паре нормально открытых контактов в его управляющей цепи, выход генератора синусоидального сигнала соеди- нен с первичной обмоткой индукционного преобразователя, связанного своими встречно включенными индикаторными обмотками через первый импульсный усилитель и детектирующее звено с регулятором яркости электронно-лучевого индикатора, симметричные входы двух согласующих усилителей соединены соответственно с двумя парами выходов синус-косинусного
преобразователя, а подвижный контакт линейного потенциометрического преобразователя через второй импульсный усилитель связан с центральным радиально отклоняющим электродом электронно-лучевого индикатора,
2.Устройство по п. отличающееся тем, что индукционный преобразователь выполнен в виде соосно установленных стержневого сердечника и ферромагнитного цилиндрического корпуса с коническими концентраторами на концах, размещенных на сердечнике первичной обмотки и установленных симметрично относительно нее встречно включенных индикаторных обмоток, а также закрепленных на торцах корпуса износостойких диэлектрических пластин и закрепленной на одной из них компенсирующей пластины.
3.Устройство поп. 1,отличающее- с я тем, что узел сканирования выполнен в виде приводной оси, корпуса конической пары, параллельно установленных направляющего стержня и ходового винта, установленной на направляющем стержне и ходовом винте каретки с преобразователем, ступенчатой втулки, боковая поверхность вблизи одного из торцов которой представляет собой шкив, токосъемника, закрепленных на корпусе стоек с присосками, предназначенными для крепления на поверхности контролируемого объекта, а расположенный в корпусе конец приводной оси выполнен в виде второго шкива, связанного с первым приводным ремнем, одна из шестерен конической пары закреплена в корпусе на неподвижной оси, ступенчатая втулка установлена на этой оси посредством подшипников, вторая шестерня конической пары закреплена на конце ходового винта, установленного посредством подшипников вблизи второго торца ступенчатой втулки, конец направляющего стержня скреплен со ступенчатой втулкой, токосъемник представляет собой концентрические токопро- водящие кольца на торце ступенчатой втулки и закрепленные на корпусе контактные щетки, а преобразователь соединен с чареткой посредством плоской пружины.
35 -о- г fifir si
до34--.
x
H
I/
ъ-Чо
44
HB
фиг-i
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1986 |
|
SU1384932A1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО КОНТРОЛЯ ДИНАМИЧЕСКИХ КРУТИЛЬНЫХ ДЕФОРМАЦИЙ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2001 |
|
RU2217716C2 |
| Рентгеновский дефектоскоп | 1977 |
|
SU949438A1 |
| Устройство к копру для регистрации диаграммы динамического нагружения | 1977 |
|
SU926562A1 |
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1989 |
|
SU1763877A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ХАРАКТЕРИСТИК СРАБАТЫВАНИЯ РЕЛЕ | 1971 |
|
SU300902A1 |
| Устройство для измерения диаграммы направленности антенны | 1984 |
|
SU1272282A1 |
| СПОСОБ РЕГИСТРАЦИИ И ВОСПРОИЗВЕДЕНИЯ ХАРАКТЕРА ПЕРЕМЕЩЕНИЯ ФРОНТА ВЗАИМОДЕЙСТВИЯ НОЖА РОТОРНОГО КОПРА С ИССЛЕДУЕМЫМ ОБЪЕКТОМ (СРЕДОЙ) И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1999 |
|
RU2173844C2 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
Изобретение относится к средствам неразрушающего прочностного контроля. Цель изобретения - повышение информативности за счет визуализации распределения и динамики развития процессов поверхностного разрушения. Эта цель достигается благодаря тому, что вместе с вращением каретки с индукционным преобразователем вокруг неподвижной оси происходит также радиальное перемещение каретки вдоль ходового еинта и направляющего стержня. Одновременно с этим на ортогонально отклоняющие пластины электронно-лучевого индикатора поступают взаимно смещенные по фазе на угол 0,5 п синусоидальные сигналы с выходов синус- косинусного преобразователя, в то время как с выхода линейного потенциометриче- ского преобразователя на центральный ра- диально отклоняющий электрод подается линейно изменяющееся напряжение. При этом устройство графически воспроизводит в наиболее наглядной и удобной для следящего контроля форме индикаторные диаграммы с яркостно аттенюированными совокупностями элементов, конфигурация и геометрическая дислокация которых характеризуют как текущее положение, так и динамику развития усталостных и других дефектов на образцах изделий в процессе их испытаний постоянными и знакопеременными нагружениями. 2 з.п. ф- лы. 4 ил. сл с о со го N0 о Сл)
i12 ii
A-i
Г/1--ГчП L
//
/4 75
Фиг, 4
54
| Сканирующее устройство к дефектоскопу | 1973 |
|
SU565247A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы для неразрушающего контроля материалов и изделий | |||
| / Справочник под ред | |||
| В.В.Клюева | |||
| М.: Машиностроение, кн | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| кл | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| Способ контроля поверхностных деформаций и устройство для его осуществления | 1986 |
|
SU1516942A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
